We got lucky and managed to get a place in the Subterranean Showdown in August. Yey ![]()
Our first little bot 'Muhammad Al-Bee was put together very quickly and wasn’t planned too well.
Some of you may remember young Amy was a tad trigger happy and managed to drive him straight into the wall ![]() but that’s okay, it’s all a learning curve.
but that’s okay, it’s all a learning curve.
She decided to retire Muhammad (he’s currently keeping Snappy company on display) and do a complete redesign and rebuild for the next bot. This time she was keen on making a grabber style beetle…
So carrying on from the boxing theme the new beetle is ‘Grab-bee Steve Bee-dall’ named after a local boxer here Steve Bendall a middleweight who is working hard to regenerate the boxing community here in sunny sunny Bournemouth. But I digress…
Amy has been a lot more involved with the build this time…last time she designed the bot and only really decorated him. This time she’s been involved with the electronics and build as well as the full design.
Also rather than getting my dad to mill the chassis etc at work, we brought Amy a little CNC router to have a go herself.
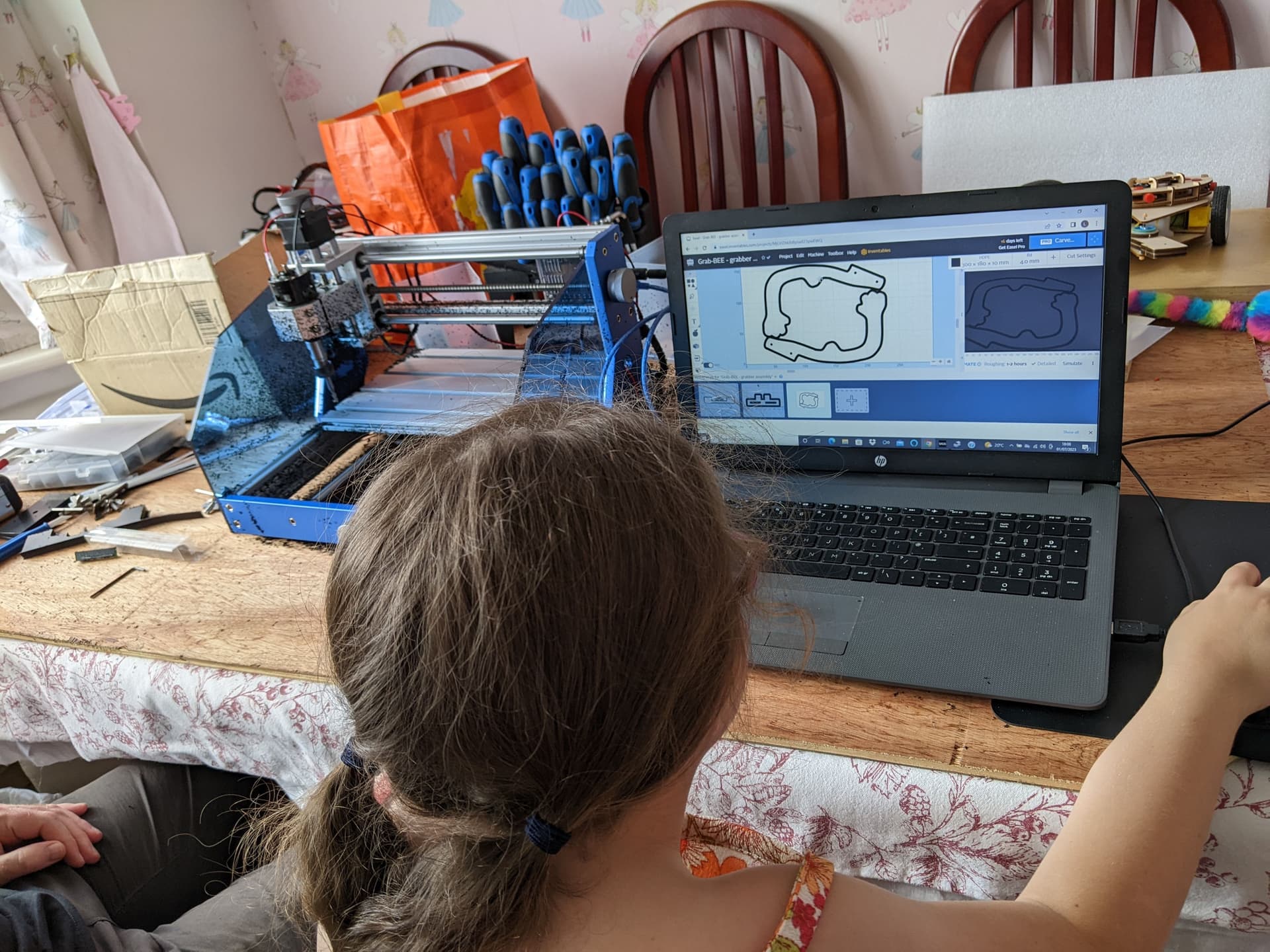
She’s quite chuffed that she’s been able to do some of the programming and bring her design more to life. Here are the ‘grabbers, complete with kick arse muscles’ she programmed and ready to go on the bot…
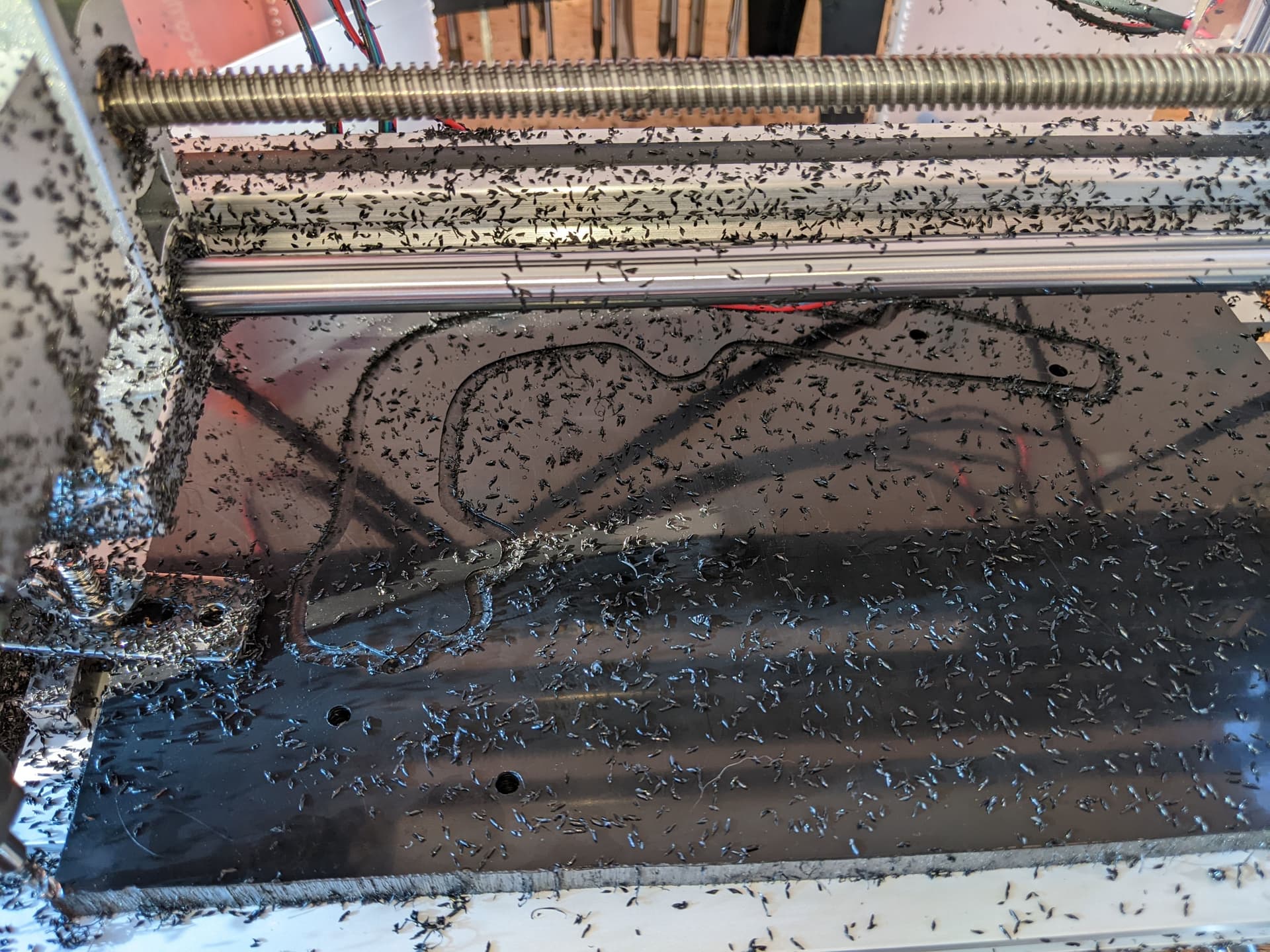

At the moment the machine is set to drill the bulk of the way through the HDPE so that she can just ‘cut’ the pieces out at the end very easily.
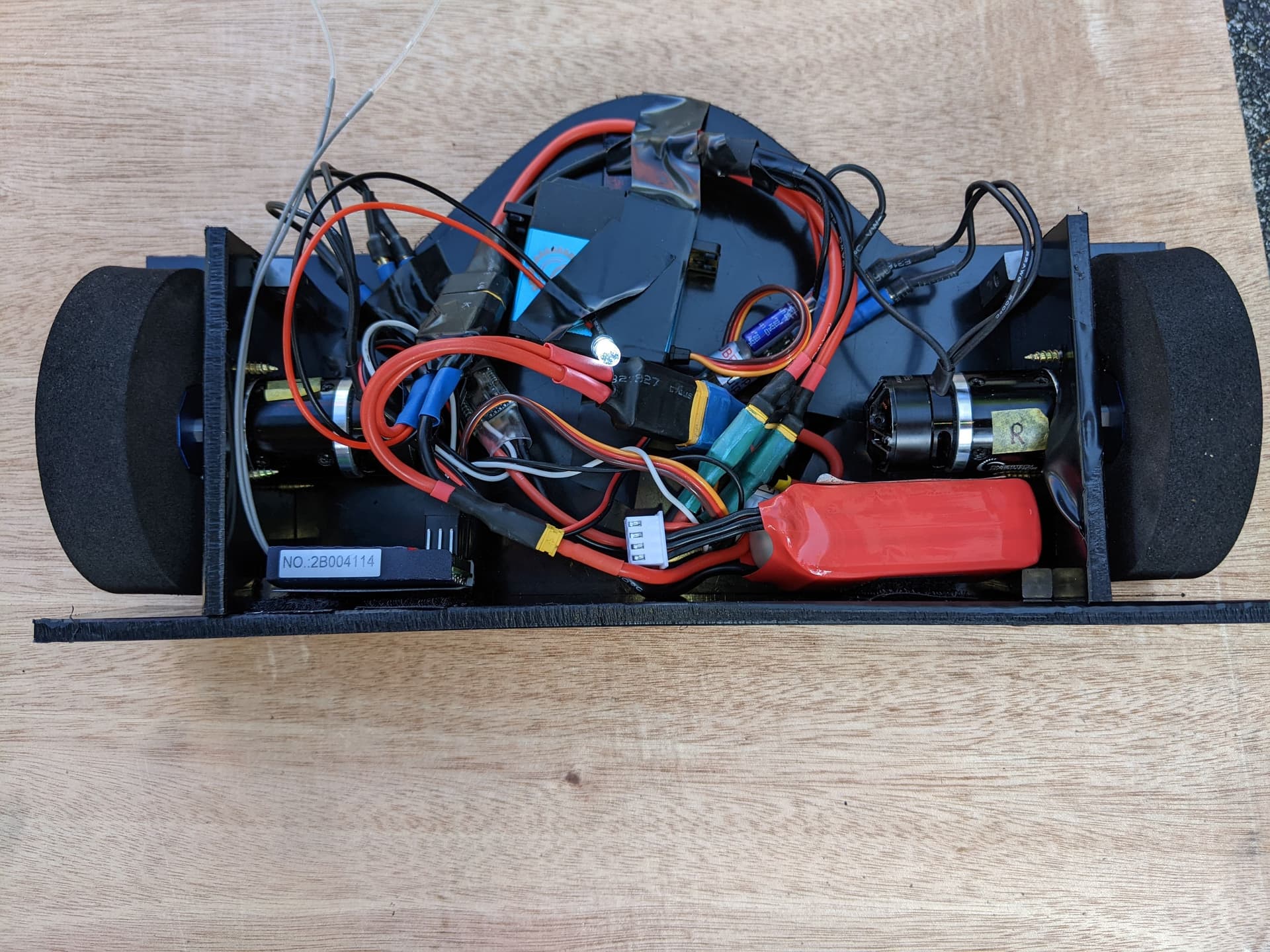
We took our poorly wired circuit to Crewkerne where Harry was super kind and looked at it and offered the best advice (lead based solder is definitely easier and more effective!) as well as doing some tinkering to get it more reliable.
This brings us pretty much up to date - the base of the chassis is complete and the bot drives ![]()
Hopefully tomorrow we will get the ‘grabbers’ on and working so we can do some ‘proper’ test drives before Amy finishes school for the summer and goes off on her jollies.
For Amy I don’t think she’s too bothered about how far she progresses in any events, but she definitely wants to improve her bots and knowledge. So we welcome any feedback/advice.
One thing we did struggle with last time was the bot working intermittently, which I guess was down to our poor circuit and poor traction on the wheels. If anyone has any ideas on improving either of these, that would be fab.
I’ll update again when there is more progress. Sorry it’s not as thorough as other build logs, time is always against us ![]()
(and for those of you who we haven’t pestered at various events {sorry} and have no idea what I’m on about, my daughter Amy is 9 years old and a massive RWs fan {she’s old school} but fell in love with beetle weights after watching Bugglebots and wanted to have a go at building her own after we went to BBB as spectators October 2022. Al-Bee was her first build and had metal prongs on the front and a step drill on the back, which made his debut at the inter uni comp earlier this year).






