Hi all, this is Andraste which is my first antweight build designed to compete in the Bristol Plastic Ants 2v2. I would greatly appreciate some feedback from those more experienced as to how well this may or may not work, and if i missed anything in the rules before i take it to comp.
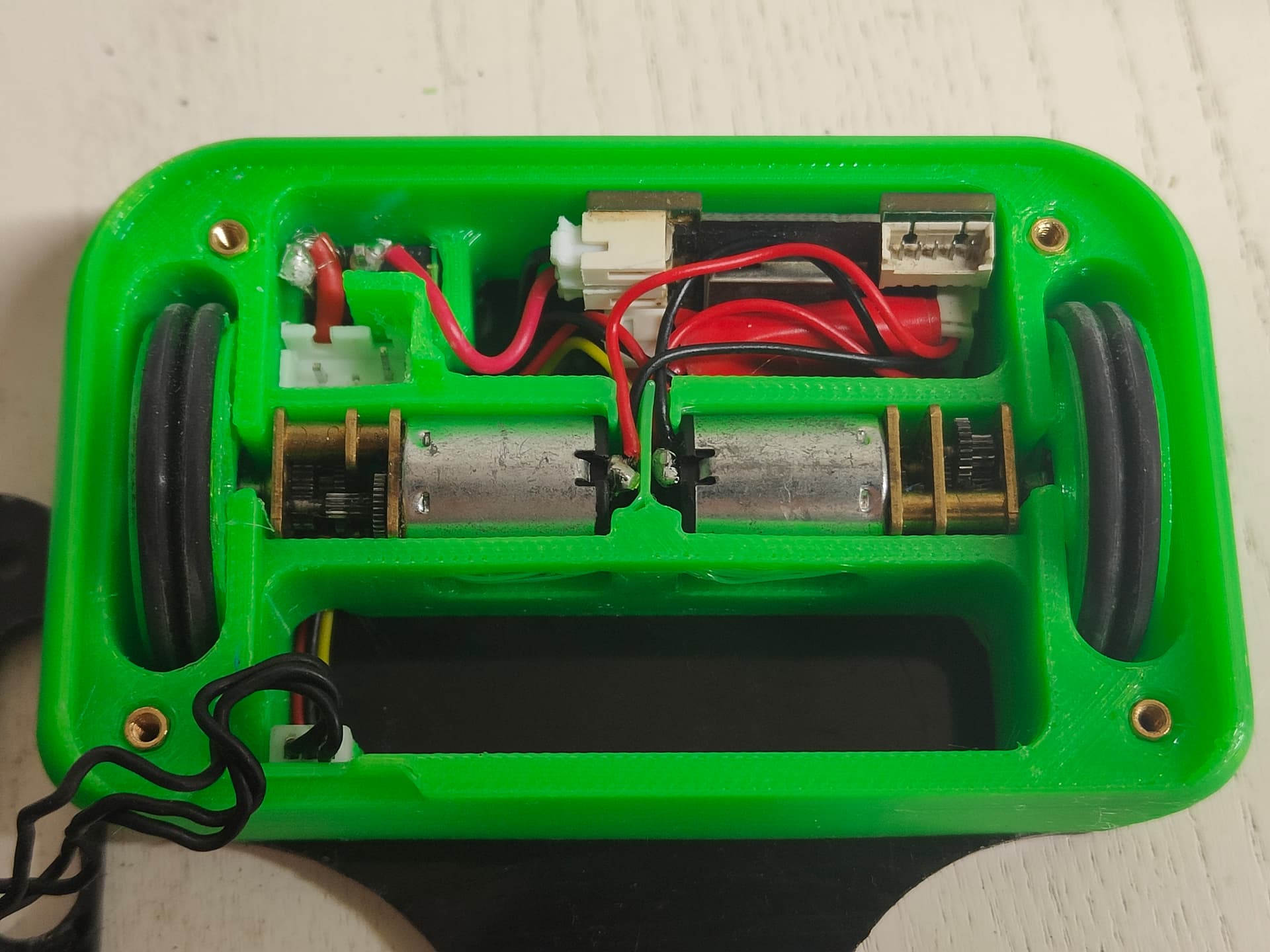
Mechanics: The total robot comes in at 148g with a fresh unblunted spinner. I’m using green 3D printed TPU armour for the sides and laser cut POM for the top and bottom armour plates. Wheels are again TPU 3D printed with O rings for grip. The spinner is 3mm laser cut ABS with a symmetrical design for simplicity. The spinner is directly mounted to a brushless motor which i know might destroy the motor pretty quickly, but for simplicity on my first build, it’s easier than messing with belts.
Electronics: The robot is running on a 2s lipo (i know this one is very puffed, it’s just my test one). Simple on off marked switch and then into a custom control PCB. The drive motors are 500rpm 6V N20 gear motors which seem to give decent speed and controlability. The spinner motor is a 2750kV 1404 drone motor, giving me a theoretical tip speed of almost 275mph, although in practice it makes the drive fairly uncontrollable at anything past 200mph. I’m then using a stadia gamepad controller to operate the robot in a near identical way to “Kurbstop” our University of Surrey beetleweight that we entered in February.
Safety: 3D printed cradle with a “shield” that covers the whole spinner and then a pin that locks through the top armour, shield, bottom armour and then screws into the cradle. The pin can also be inserted just through the hole in the spinner and armour to lock it. The on off switch has the off position laser engraved into the bottom armour next to the switch.
Thanks for reading and i hope someone can give me some feedback, good or bad, on my first bot.
Douglas