Hello people in my computer. I have been meaning to create a build log for this for a while, and with my second event now over I figured this was as good a time as any to finally sit down and write it.
Part 0 - Early beginnings:
I began my robot journey in around 2019 where I purchased a couple of cheap n20 motors and a set of Pololu wheels, but then was put off by the price of a transmitter and ended up not doing anything on it for years. Around 2022/2023 I discovered Bristol Bot Builders guide for antweights and finally committed to buying my first transmitter along with a servo and a couple of batteries and finally built my first robot - a wedge flipper.
Well… I tried to at least. Due to my inexperience and being new to 3D printing I was never able to actually get a flipper plate made, and instead I gave up after about a month and finally got to building a new antweight.
After building a lifter I decided that I wanted to build something with more destructive potential, and so I went about designing an antweight hammer-saw style robot, however due to my blatant inexperience with both CAD and soldering I never got very far with it as I could never fit all of the electronics in it, and I also killed a malenki nano which destroyed all of my motivation for the project and the furthest I got was a drivable chassis which could waggle an arm.
After that massive failure I began work on a new ant which was a four bar lifter. As I was not intending on competing I did not focus massively on weight, which is lucky as the robot was 148g without a top plate, and remains without one to this day. This was, however, my first working robot, and it finally felt rewarding to see something work as intended after wanting to make these for years.
Part 1 - Dave:
After messing around with antweights for around a year I became fed up with what felt like such a restrictive weight and space limit, and with NHRL beginning to gain traction I felt like I wanted to finally create something that was truly destructive. It was at this point I began working on my first beetleweight robot. As any new builder who is giddy at the idea of destruction would, the first thing I settled on is what weapon I wanted to use. At this point I was using freeCAD and was still incredibly new to CAD so I did not possess the skills to design a custom weapon, however I had seen a robot called Lynx doing incredibly well with a weapon called an eggbeater, so I did some research and discovered that I could purchase an eggbeater style weapon from fingertech, and as a bonus it seems to have been used by a decorated robot at NHRL called Shreddit Bro, so I went ahead and ordered the weapon, along with some belts and pulleys and got to designing. At this point the robot went through many different designs as I slowly got better at CAD.
The first version that I have a record of is a four wheel drive platform which was going to have machined UHMW siderails and machined aluminium internal rails, along with custom moulded wheels. It also used all off the shelf mounting plates for the drive motors, and had nothing to stop wires getting caught in the cans of the drive motors. Luckily this version never got anywhere.
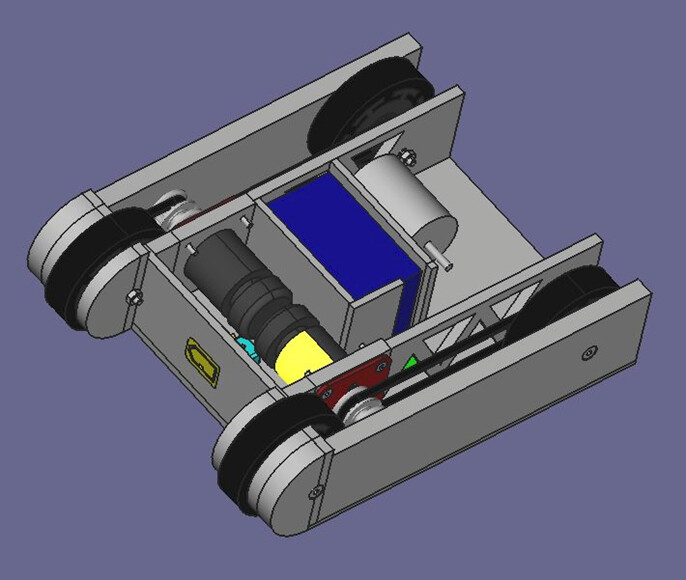
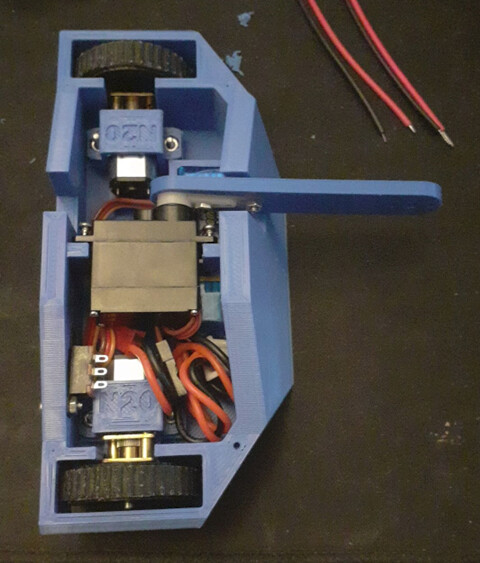
My second attempt at designing the robot was much more successful as I now had an idea of what I wanted to make and was much more knowledgeable at CAD. This version reached completion in CAD and was much closer to the robot that I wanted to make, however looking back on it there were still many problems with it. This included there being a grand total of 0 space for electronics, as I completely forgot that wires do exist, and also that I did not know about TPU at this point, meaning the entire robot was going to be printed from PETG. The robot still had custom moulded wheels and had the back wheels mounted directly to the drive motors with the front wheels driven by a belt. The height of the robot was still constrained by the mounting plates that I was using for the drive motors, which didn’t give me nearly as much freedom as I wanted, however this version did finally look like an actual robot.
After making this I built a test platform to test the drive and it was at that point that I realised just how much space wires take up. This led me to realise that the amount of space in the current version of the robot would be nowhere near enough, and that I would need to change a lot in order to fit everything into it.
After this discovery the robot was updated once more to include much more space internally. This resulted in a very weird drive configuration where the back wheels were driven by gears from the motor, while the front wheels were driven by the belts. This was a result of not knowing that you can purchase pulleys and belts from places other than fingertech, and not wanting to spend £40-50 on shipping for a few belts. I signed the new version up to the BBB new bots event in August of 2023 under the name Dave, however a mixture of inexperience and lack of knowledge resulted in me having to drop out of the event as there were a few “minor” problems with the robot, those being: Not enough space, not having any parts made, and my proof of mobility being… unideal… to say the least.
Not only could the robot barely drive in a straight line, the wheel falling off was the final straw and I decided that there was no way that I was going to be able to get to the event. That paired with the entire robot being made from PLA and if I was to attend it would not end well for me. This was a wakeup call for me to finally start creating an actual good robot, and doing my research.
Part 2 - Antimatter:
After the absolute mess that was Dave I took another year off from working on robots, only coming back briefly after about 5 months to design a new drive train.
Now that the absolute mess that Dave was had been left behind, and I was left with a pile of electronics I decided it was finally time to suck it up and learn to use a proper CAD software so I created an Autodesk account and installed Fusion360 as I heard it was meant to be decent. After spending a couple of weeks getting to grips with parametric CAD software, as opposed to rotating cubes and spheres to make my designs, I finally felt ready enough to attempt to work on my new robot. While designing this version heavy inspiration was taken from Lynx as I wanted a shortcut to success and thought that creating a perfect clone of a good robot was the key to winning. This version of the robot did not get far, but did already show much more promise than had ever been shown by previous versions, having custom motor mounts and much more space internally - I was finally getting close to the robot that I wanted.
Part 2.1 - Ant1matter:
After doing some more research and completely starting over once more I slowly began to develop the first version of Antimatter that would finally see use in an arena. This version of the robot was still very much inspired by lynx, however that was primarily in terms of shape, this was mainly to do with cost as I was still in school at this point and had no real form of income, and just 1 repeat pro motor was a tough pill to swallow, so I didn’t want to shell out more on armour. Initially this version was going to have carbon fiber base / top plates, UHMW side rails, and a titanium top plate above the battery / weapon motor, however this was way too expensive and so that was very quickly changed. I did, however, still 3D print this version as I was itching to have something that I could hold after not having anything overly interesting and having the weapon in a drawer for well over a year at this point.
The first version of Ant1matter was completed very hurriedly in July of 2024 as I wanted to show a couple of my teachers before leaving for summer break, and the first drive test of the robot was completed and I was happy that I was finally getting somewhere with it.
While showing the robot to some of my friends I noticed that one drive side seemed to be being temperamental and I had no idea what was causing this. After doing some digging it turned out that one of the phase wires had snapped on the drive motor incredibly close to the can and once that had been resoldered upon testing again the motor was now once again working. Well, that was after I had created an entire help thread on the forums because I had plugged my receiver plugs in upside down and didn’t notice…
After around a month of procrastinating and small changes here and there I finally drilled out the centre of the pulley I had to be large enough to fit it onto the motor shaft, however this was drilled by hand and as such it was not entirely straight, however it did work and in August I was finally able to do the first weapon test. The tip speed for this version of the robot was around 200mph, and at the time I was absolutely terrified of it. I will also take this moment to say about the importance of test boxes, and how spinning weapons should always be tested inside of them - what I do is incredibly bad practice and should not be replicated.
After testing the weapon in my back garden I printed the remaining parts of the robot and went down to the local skate park with the robot and the old PLA chassis of Dave to finally put that horrendous thing to bed. While slightly underwhelming I was still proud of what I had created and I felt that I was finally worthy of saying that I had built a combat robot.
A month later nothing had really happened, however my 18th birthday was rapidly approaching so as a birthday present I was given tickets to go to extreme robots and go backstage, so naturally I took antimatter. I used this opportunity to fanboy slightly, and this was my first opportunity to talk to other builders, along with getting my robot signed by many competitors from Robot Wars too.

But anyway, back to the build. Over the next few months I slowly began to print parts and some magnets were also purchased. I also bought some UHMW sheet to make the inner side rails, along with some carbon fiber to cut the baseplate from, as I was told I could use the router at school for them. Unfortunately this was not the case and the sheet of carbon fiber I purchased is still missing to this day. I was also provided the opportunity to give the UHMW to someone who works in machining and for the price of a couple of packs of shortbread he would machine me some siderails. With the carbon fiber no longer being an option as I have no way to cut it I switched to UHMW as it was not too heavy and was hopefully going to be rigid enough. At this point the new rules for BBB were released and finally switches were allowed. I quickly ordered some Just ‘Cuz PD boards to use and picked them up while I was in America, along with ordering a couple of fingertech switches from BBB. Upon returning from my holiday I soldered up the switches to the PD board (one of which was upside down and I am yet to find a way to fix it) and made my new base plates / top plates with help from some people at school. I signed up to the BBB Beetle Brawl in February of 2025 with the knowledge that I would finally have a robot that would actually work and not fall apart this time. I was just waiting on the side rails.
While testing the robot in my kitchen 2 weeks before the event the worst thing possible happened with one of the drive speed controllers suddenly catching on fire. This panicked me as I no longer felt comfortable using the BBB 25A speed controllers with the Repeat Max drive motors. It turned out that this fire had also caused further damage to the drive motor that I had already had to fix on the same wire, this time with it snapping underneath the can of the motor. This was resoldered and help in place with hot glue, however I did not want to use them in a fight so I quickly bought 2 repeat max v2 and 3 repeat 35A drive ESCs. With the new motors and AM32 ESCs the robot drove even better, however I still did not have any updates on my side rails. It was at this point that I decided I would need to print custom side rails from TPU with PETG to reinforce it (I am still not entirely sure what the reasoning for this decision was, however it is what I went with). And with those made it was off to Bristol for my first competition.
Part 3 - BBB Beetle Brawl ‘25:
Punctual as ever I finished the robot after waking up at around 5AM and had left at 6 to make it on time, but after ~3 years I had finally made it to an event. I arrived, got set up, and passed safety easily.
My first fight was against Sir Lance-A-Frog and Strongerhold. This fight went the full 2 minutes, however I got beached on the edge of the pit and was counted out with around 10 seconds to go in the fight. I did manage to cause a bit of damage to both of my opponents and was gifted Sir Lance-A-Frogs lance at the end of the event. While I lost the fight I was not too disappointed as I had seen glimmers of potential in the robot, especially with one shot punting the frog halfway across the arena.
My second fight, however, was much less successful. It was against Wheely-Big-Lad and while the first couple of engagements seemed to go my way, he soon got a good hit on my top plate which snapped my weapon motor mount in half (as it was only printed PETG) and then another hit that destroyed half of my drivetrain, leaving me completely unable to move. As I do not have too much top armour above my important electronics I decided to tap rather than risk losing a lot of stuff.
My final fight was a whiteboard against Chucky, Everest, and Wheely-Big-Lad. In this fight I got a few decent hits on most people, however the setscrew for the weapon pulley soon shook loose, and with no weapon Chucky took the opportunity to make me do the thing. Other than the loose pulley there was no damage taken, so it was simply a case of taking the battery out and sticking the robot back in its box.
During the event the robot was driving nowhere near as well as I expected. I originally thought this was a result of the fuse wire being too low and not allowing enough current to the motor controllers, however upon further inspection it seems that the bolts not being countersunk combined with the magnets resulted in the robot being high-centered on its own bolts, just enough to impair the drive. Please enjoy this sleep deprived damage report I sent to my friend after the event.
I also discovered after the first fight that the batteries I was using were not able to deliver enough current and as a result of that one of my batteries became slightly puffy.
Part 4 - Ant2matter and BBB Champs 2025:
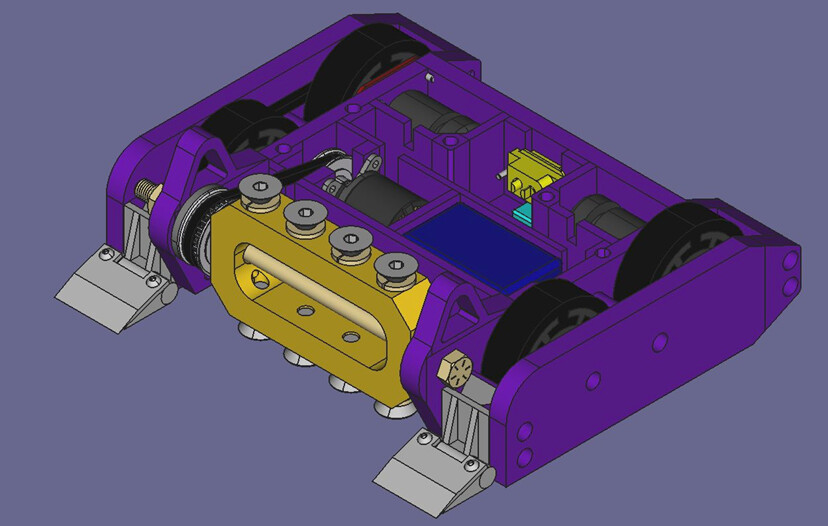
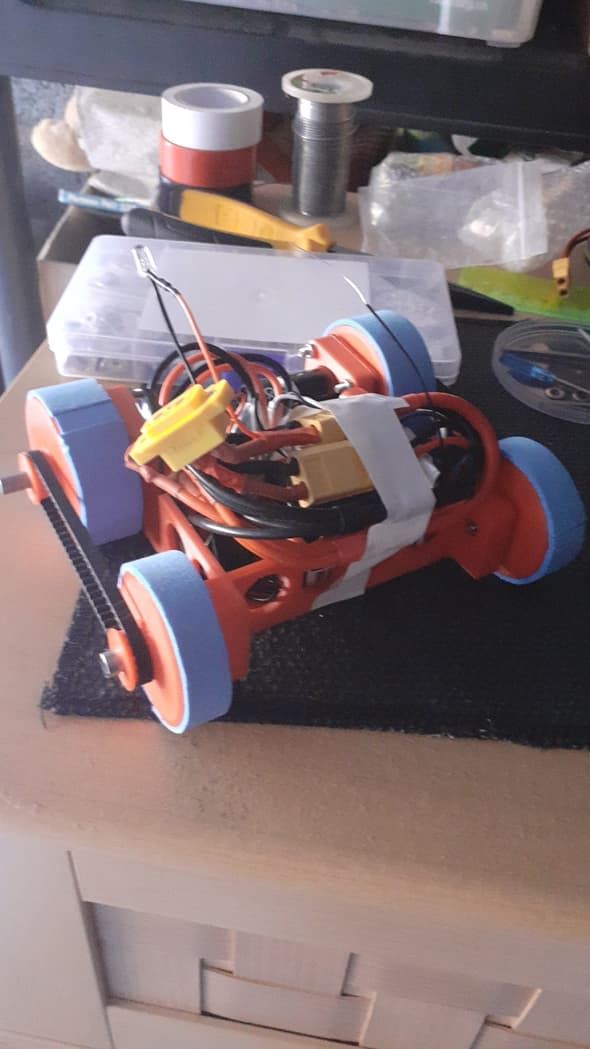
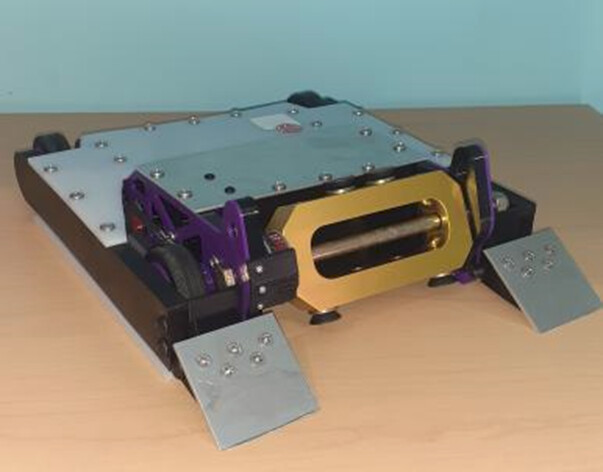
With the lessons that I had learnt from my successes and failures at the Brawl I took around a month off, and then went back to designing a brand new robot from scratch. Well not quite scratch, the siderails had finally been delivered, so it was designed around knowing I had those, along with the electronics. With this version my main goal was to fix the drive issues that I was having, so I recessed the magnets into the base plate, and switched to countersunk bolts. I also upgraded to a 4s 650mah LiHV battery with a much higher C rating so that I would no longer be at risk of damaging my battery from just using the robot. As I already had so many things sorted out for me the design of Ant2matter went much faster than its predecessor, and after around 2 months of work I had a full PLA chassis to finally test with. I grabbed a friend, threw some spare electronics in a copy of Antimatter, and put together a dummy chassis to test the weapon on. We had a few pushing matches with the two robots, and then tested the weapon. Luckily for this version I actually decided to document much more of the process and make it into a nice little video.
After this it was just a case of printing everything from TPU and cutting the new top / bottom plates from UHMW which was done uneventfully with a jigsaw. I also acquired a new 3D printer that had direct drive at this point, along with a filament dryer so I could now print TPU with much better quality than I could on my old Ender 3. I also spent quite a lot of time dialing in my transmitters sensitivity on a smooth vinyl floor completely forgetting that I have magnets and way more grip on steel that change how the robot drives. I also added a throttle curve to my weapon, along with setting it so it is capped at 80% (~200mph) unless I flick a switch, just to try to keep the gyro under control.
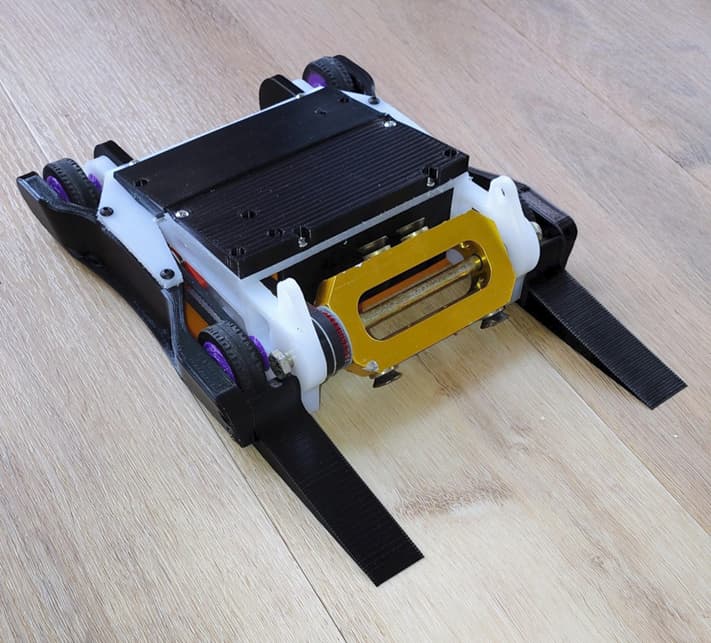
With the robot pretty much completely ready for anything I signed up for BBB Champs and was once again lucky enough to get a place. I once again passed safety quickly and discovered that the robot was around 30g lighter than I thought it was. After checking out who I would be fighting first and switching from my wedgelets to my TPU forks I was ready for my first fight.
My first fight was against two non-destructive robots, Doombot (a grabber) and Gunfinger (a lifter). My main goal was to finish the fight as quickly as possible as I knew that I barely had enough battery to last 2 minutes, even when using the weapon conservatively. With the robot no longer being high-centered and the slight upgrade in speed the robot drove amazingly and I was able to snipe a wheel off both my opponents, as well as hitting Gunfinger hard enough that his link flew out (proof switches are better). Both my opponents had tapped out and I had won my first ever fight. This was my goal for this event, so now anything else would be a bonus. Apart from a few more scuffs on the beater no damage was taken so I just needed to swap the battery and wait for my next fight.

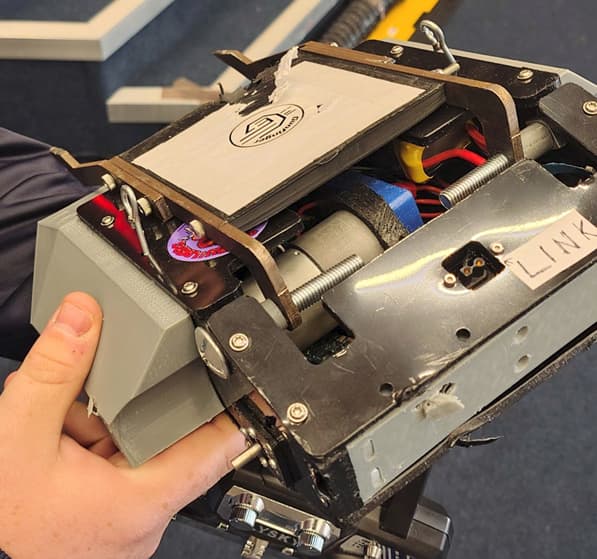
My next fight was against an undercutter called Angel Slice who was next to me in the pits. Angel Slice had been having weapon problems all day so I was not too worried, however this would be the first time I had fought a truly destructive robot, so no better way to test my anti-horizontal setup. Turns out it doesn’t help when you fail your box rush and then get flipped over, that paired with Angel Slice’s weapon working fully again and suddenly I have no more bunny ears, my weapon is hitting the floor and I am slowly being destroyed. I ended up having one of the teeth ripped from my weapon, another tooth partially ripped out and the hole being oval shaped. I also had one of the shoulder bolts for my weapon bent to a 45 degree angle, and another tire was partially destroyed. The solder joints for my weapon ESC also snapped, stopping my weapon from spinning and the bolts holding the weapon motor into its mount started vibrating loose and were rubbing on the weapon pulley. I luckily stopped trying to spin my weapon before the motor smoked.

While I may have lost this fight I can not complain as if I am going to lose, I want to get completely destroyed, and I still got my first win.
I also still have enough parts to make around 2 or 3 copies of this robot comfortably, so I plan on just running this robot, with only occasional upgrades as I see fit, until I run out of spares before actually making a new version of Antimatter. With that being said:
Part 5 - Ant3matter:
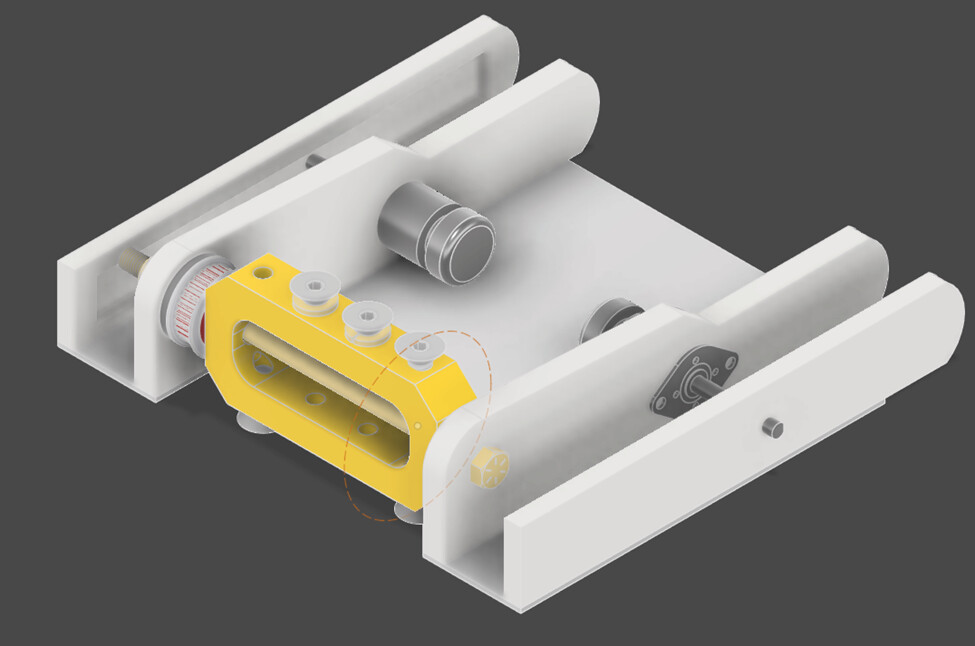
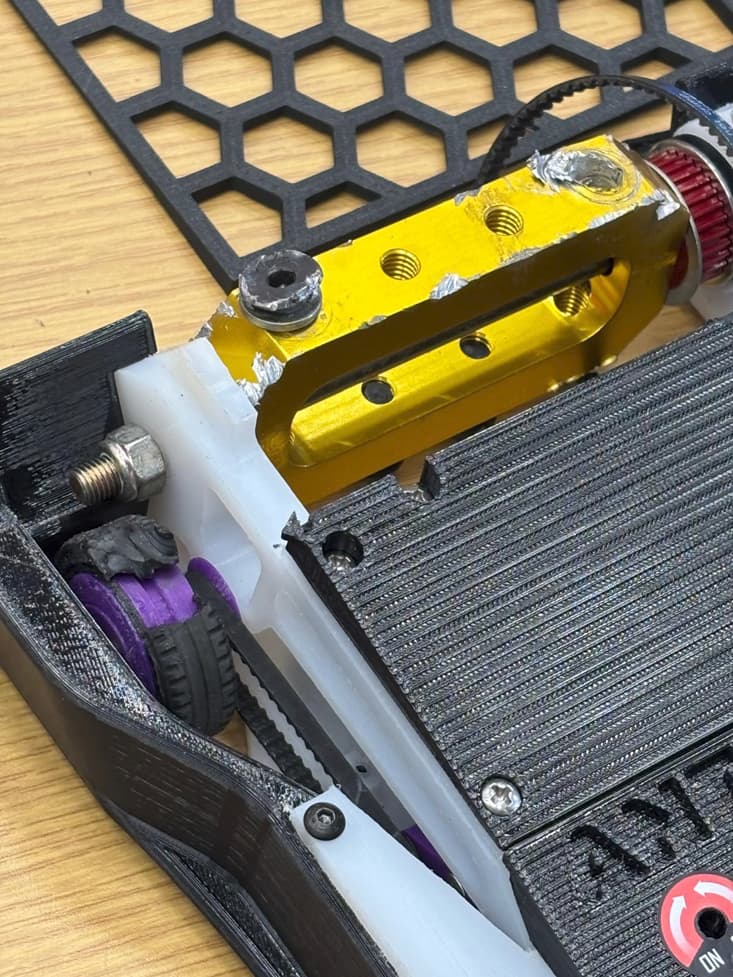
With an extra couple of years of CAD experience under my belt I have decided it is finally time to make a custom weapon. This new weapon is around 300g, and will have a tip speed of 250mph. It is also larger in diameter than the fingertech one, meaning I can run it at a lower RPM while still hitting the higher tip speeds. In order to account for the new batteries being 6S LiHV the weapon motor has been shrunk from an 1800kv motor down to a 1120kv motor. Larger wheels are also being used in an attempt to somewhat simplify the bot, and the drive speed has been upgraded from around 6mph to around 10.5mph. This will hopefully help me get good engagement more consistently. Along with this the magnets have been upgraded from 10x2mm to 20x3mm, giving me much more downforce to hopefully counteract the gyro of the new weapon.

Thank you for taking the time to read my build log, sorry about the length but this is covering the last 2-3 years of iteration to get to this point. Thank you to all the builders who took the time to talk to me at both champs and brawl, and I look forward to fighting again soon. I am sure I will update this in the future if I remember.