The first BBB Subterranean Showdown was two years ago today, marking the second anniversary of my pursuit of the art of the crush! I figure I should use the occasion to give myself a kick up the backside and write about it.
I decided to build a crusher because it seemed (to past me) to strike the best balance between interesting and feasible out of all the ideas that I had. I can’t remember what the other ideas were, but they can’t’ve been good.
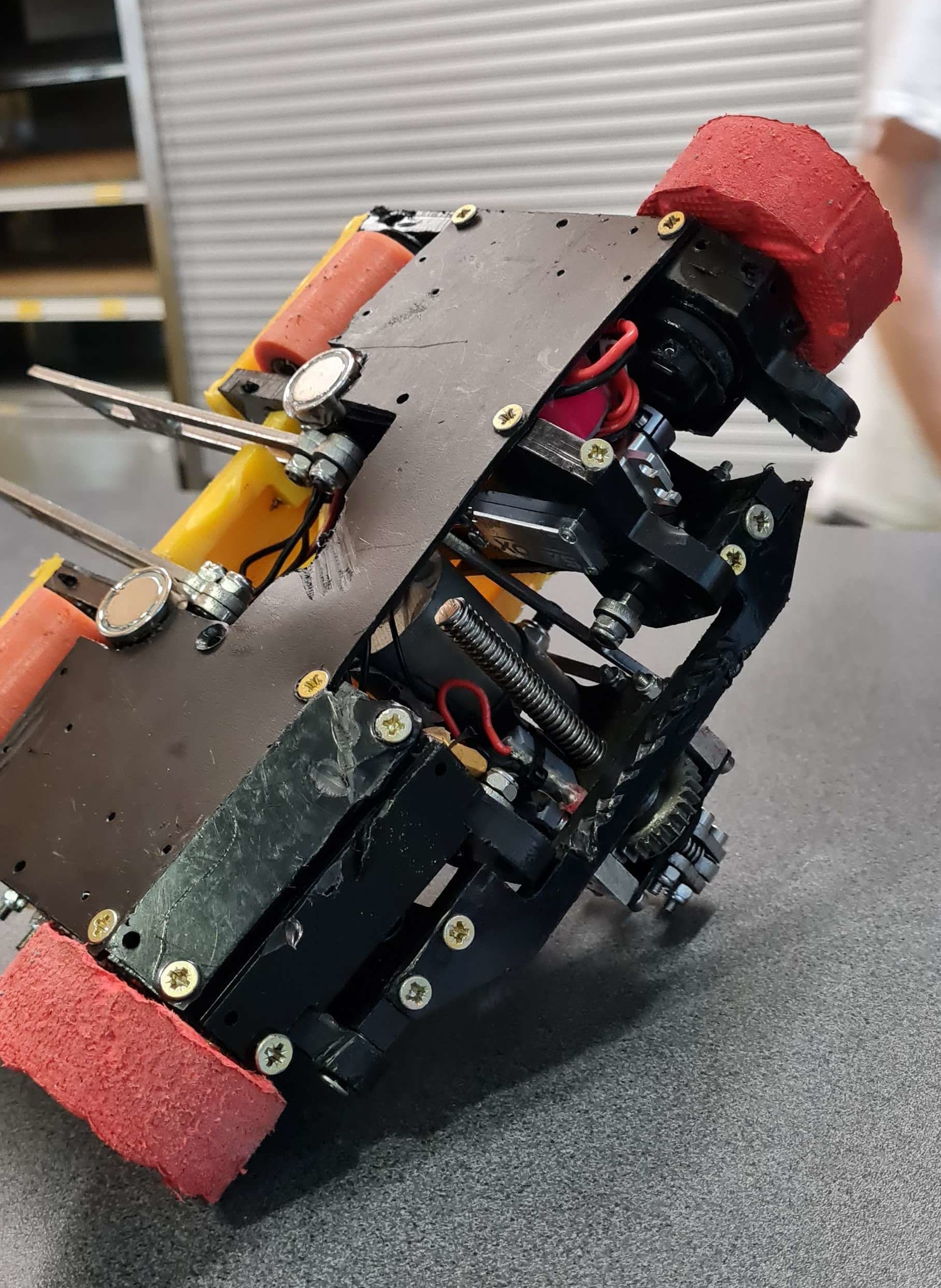
I built AntiThesis version 1 with Matt Crees, so it was a bit of a fusion of our very different building styles. The crusher was my CAD, overanalyse, reCAD, prototype, rereCAD, get machined; while the rest of the bot was his preferred hand cut HDPE.

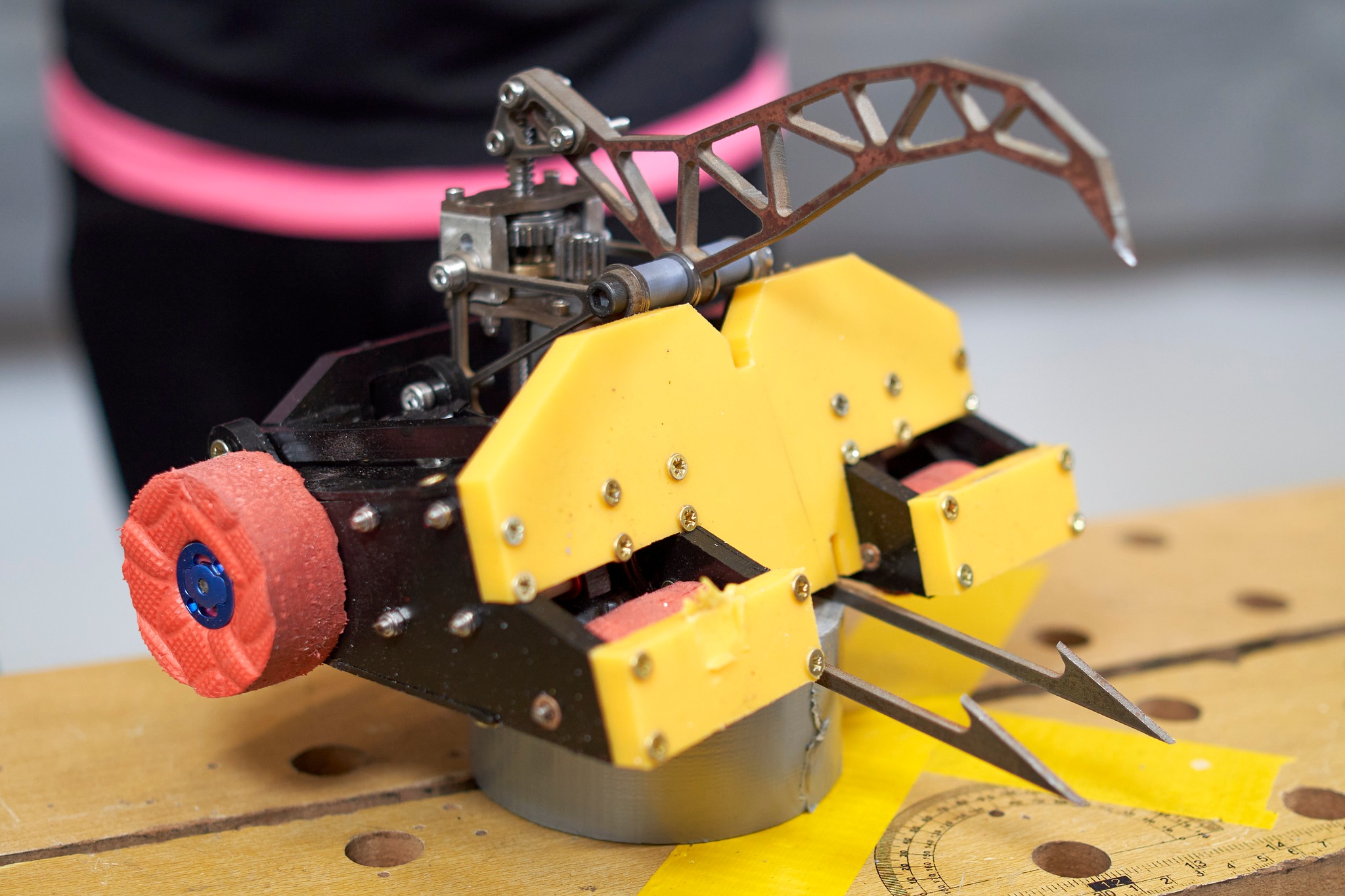
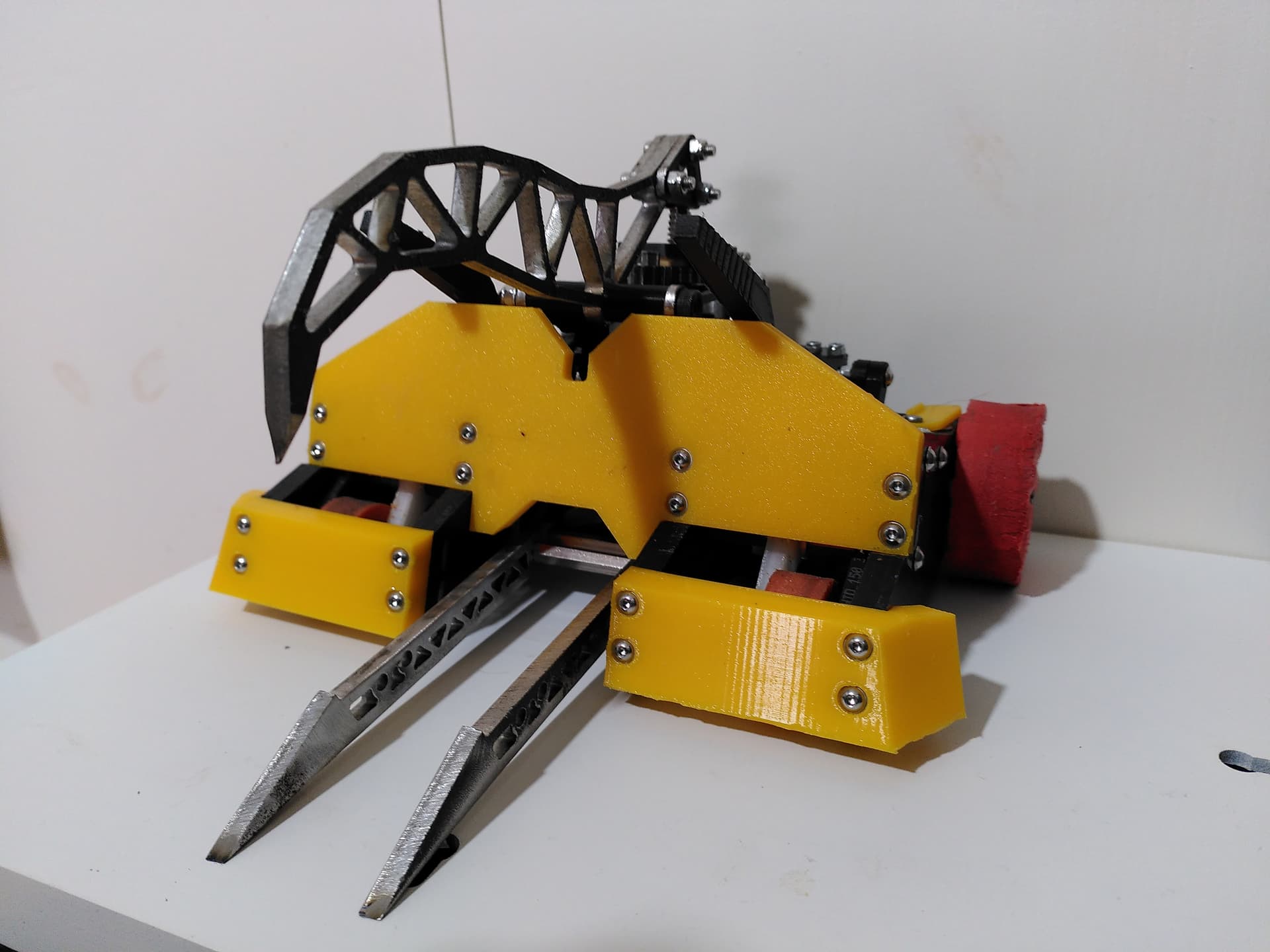
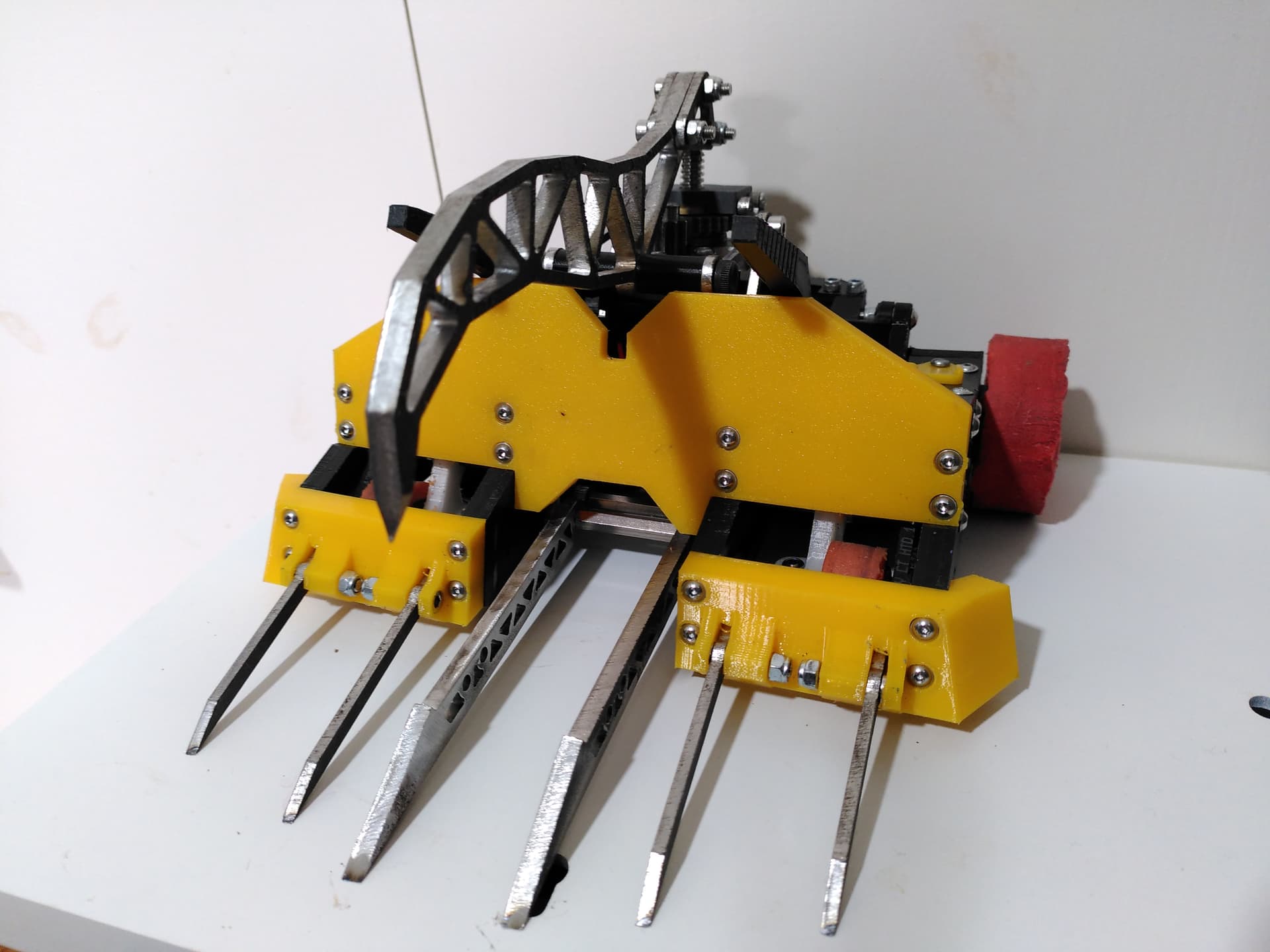
This is the only nice photo I have of AntiThesis V1, and I don’t have it to hand to take more. This post will be low in pictures, sorry
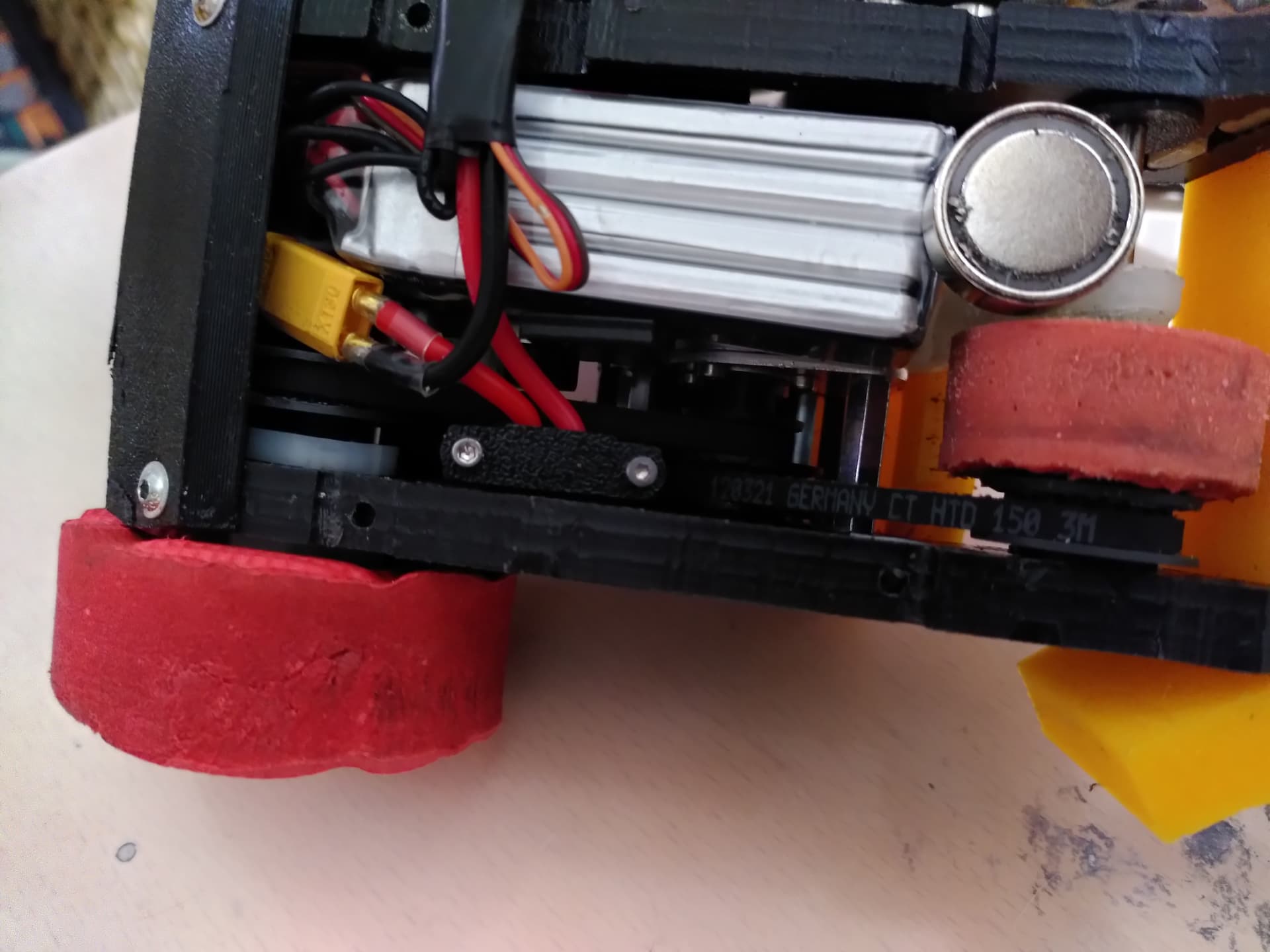
This ran the standard BBB brushed drive kit, but with double thickness foam wheels. It used two 300mAh 2s ant batteries in series, which gave it just about enough battery life to make it through a fight. We had to have two chargers running constantly to get it charged up between fights though.
The crusher mechanism was shamelessly copied from inspired by Unconscious 514. It had a pair of 3mm hardox frames with forks built in, and a 3mm hardox claw driven by a custom made linear actuator.

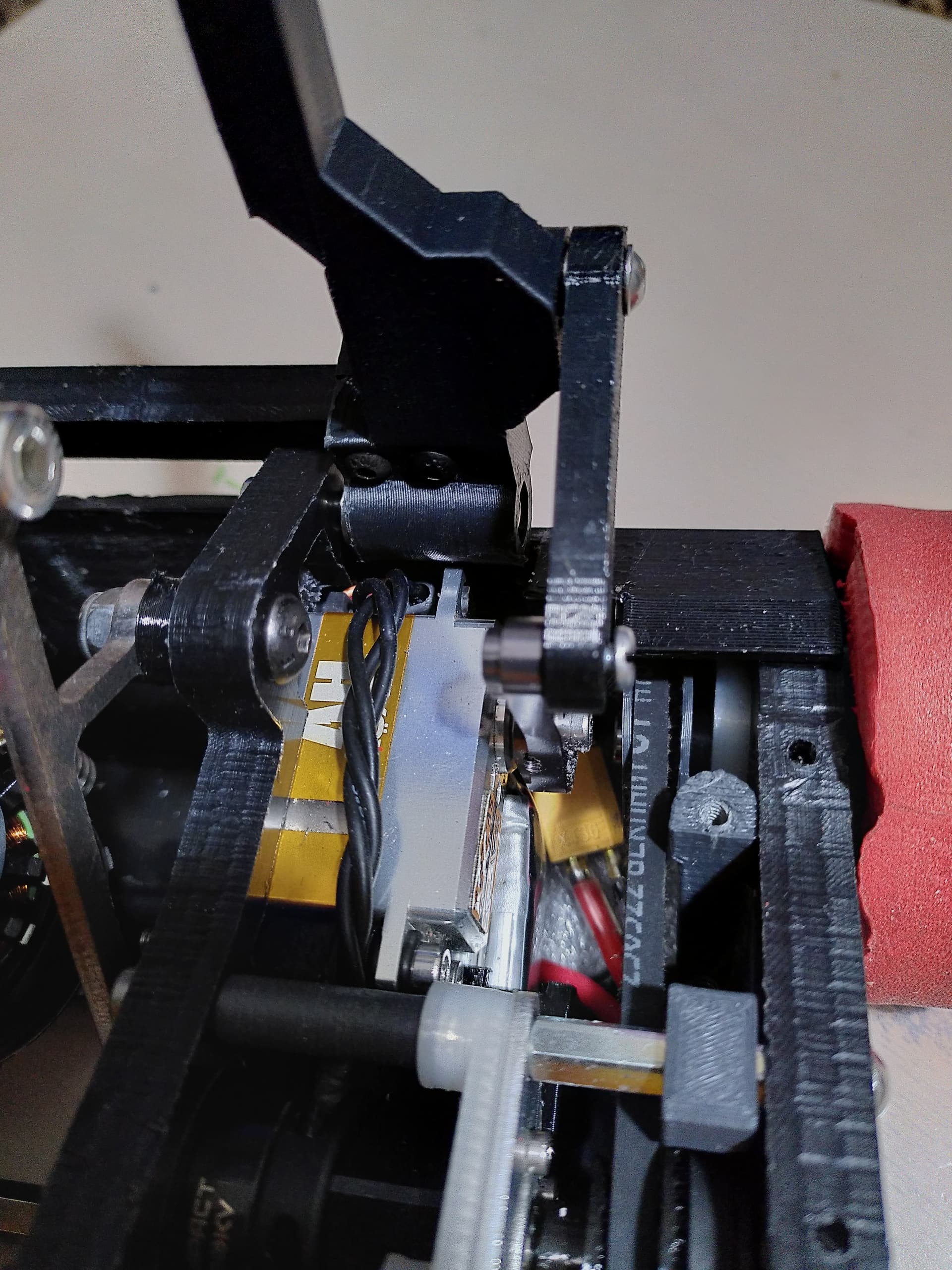
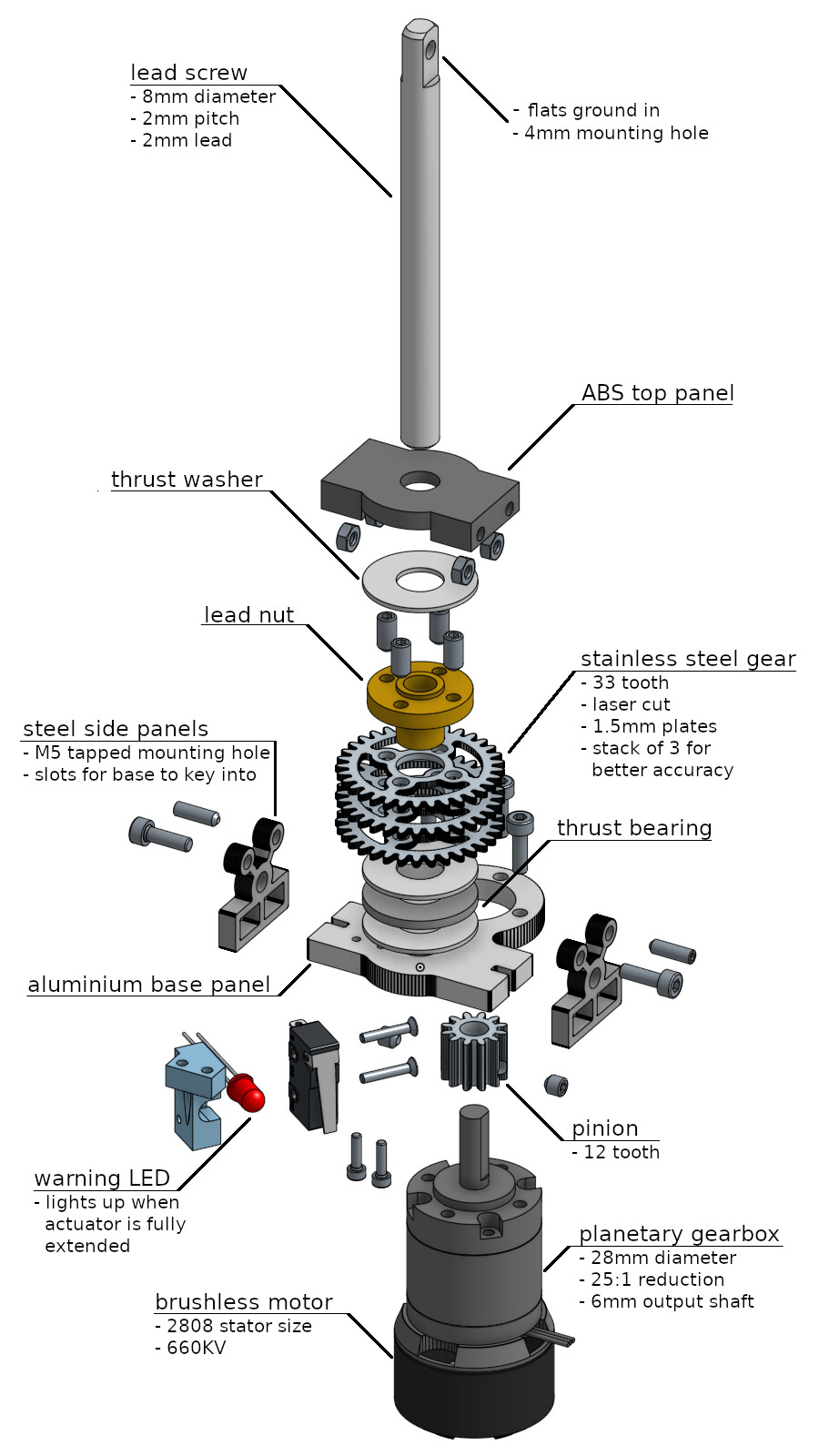
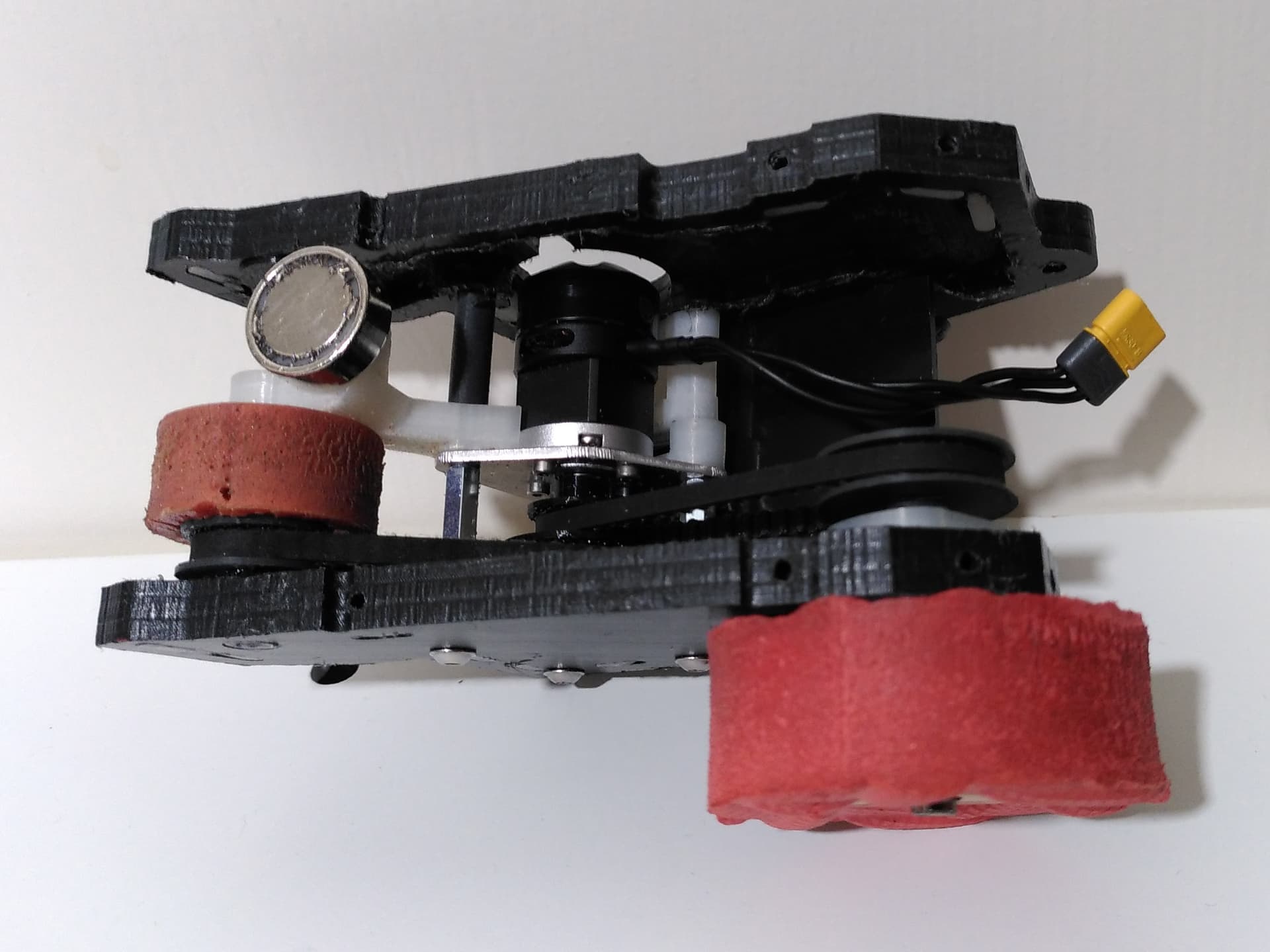
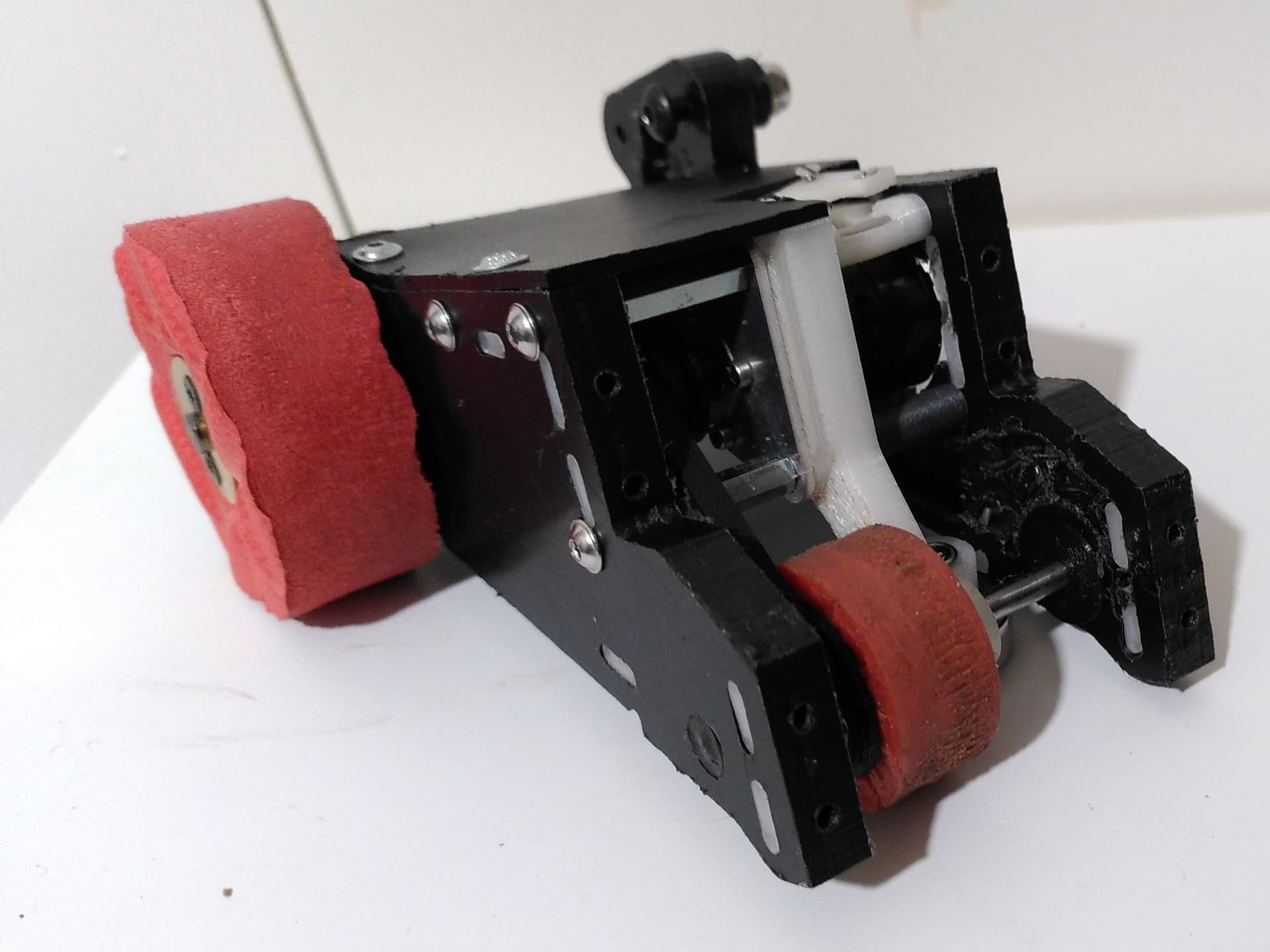
The linac, minus the hole drilled through the leadscrew. The screw with the hole is currently in V3
The linac used a lead screw with a steel gear grub screwed onto the nut. This was driven by a 30:1 37mm gearmotor mounted to a hardox panel. A pair of aluminium side panels gave the linac gearbox structure, and a place to attach to the hardox frames. The claw bolted into a hole drilled through one end of the lead screw.
Version 1’s performance wasn’t amazing. It couldn’t push anything, couldn’t self right, and a very high centre of mass made it prone to popping wheelies. It managed to do alright at Showdown though, simply because most of our opponents had bots that were just as unreliable.
The main success from V1 was the crusher. The first sign that we were on to something was when it bent the 6mm steel screwdriver that we used for the locking bar. It punctured a couple of top plates during the comp, but hit empty space rather than any internals. The only issue that came up was a tendency for the 3mm claw to flex during crushes. (It would definitely have bent horribly if it was hit too)
Join me next time for AntiThesis V2, where I replace the problems V1 had with a whole new set of problems.