Hi guys, I’m looking for some advice on switch placement, more specifically when it comes to shell spinners. I’ve built a few iterations of a shell spinner before and had a link running up through a central carbon fibre shaft, however the builds no longer exist (mostly because they would’ve disassembled themselves in combat). I want to eventually have another go at building one up more successfully, but I’d like a bit more info before that.
Do the rules allow for the slide switch/link to be on the underside of a shell spinner?
The only options I see are a link through a hollow shaft again or a switch underneath. A slide switch on the chassis would be great as I could change to a shoulder bolt or something for the weapon shaft and not have to deal with wiring a link through a tube. With a locking bar through the shell and the chassis, it seems like an underside switch would be okay? It would be cool to see an antweight screw switch be standardized, but that’s not an option right now I believe. Any more advice would be greatly appreciated!
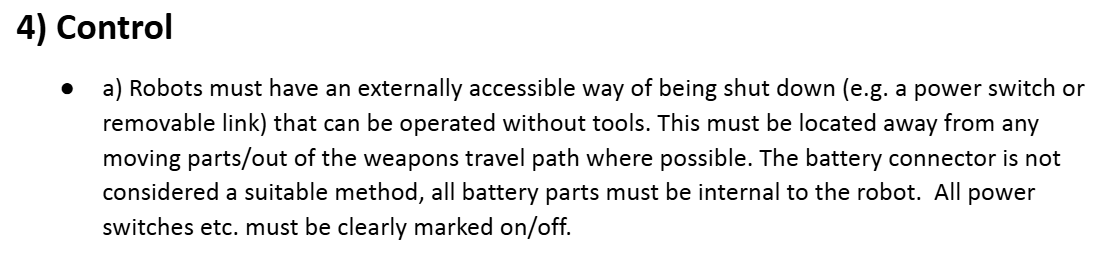
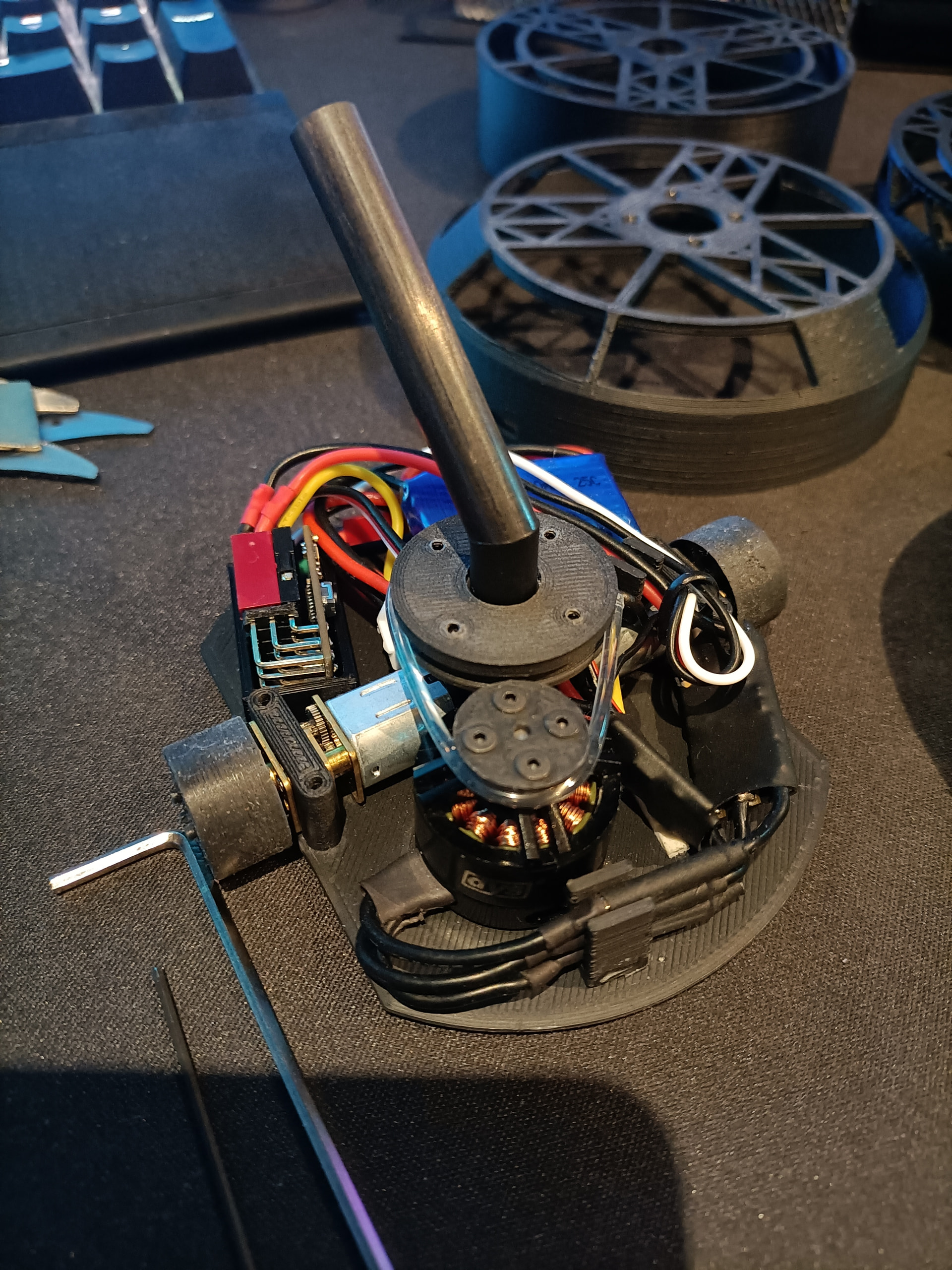
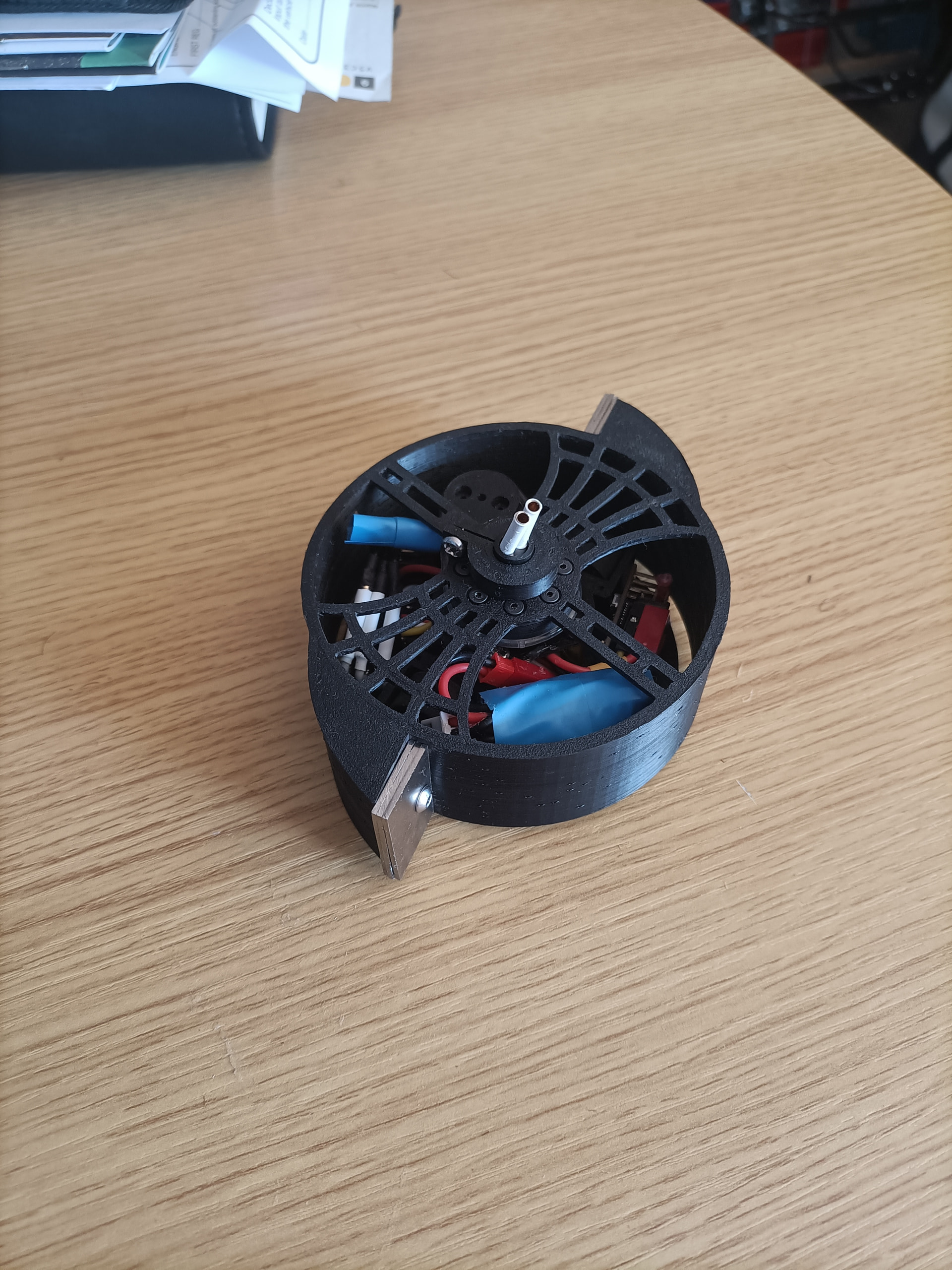
I’ve attached the 3 pictures I ever took of the shell spinner builds. If they ever saw combat, they would’ve ripped themselves or been ripped apart and have some questionable design choices, but I learnt a lot and it was good fun.

Rats nest of my first attempt, you can see the slide switch at the end of the self-righting pole.
Better second re-design, still would’ve ejected its guts.