I thought I’d make a thread for all the antweight stuff I get up to rather than have separate threads for each one.
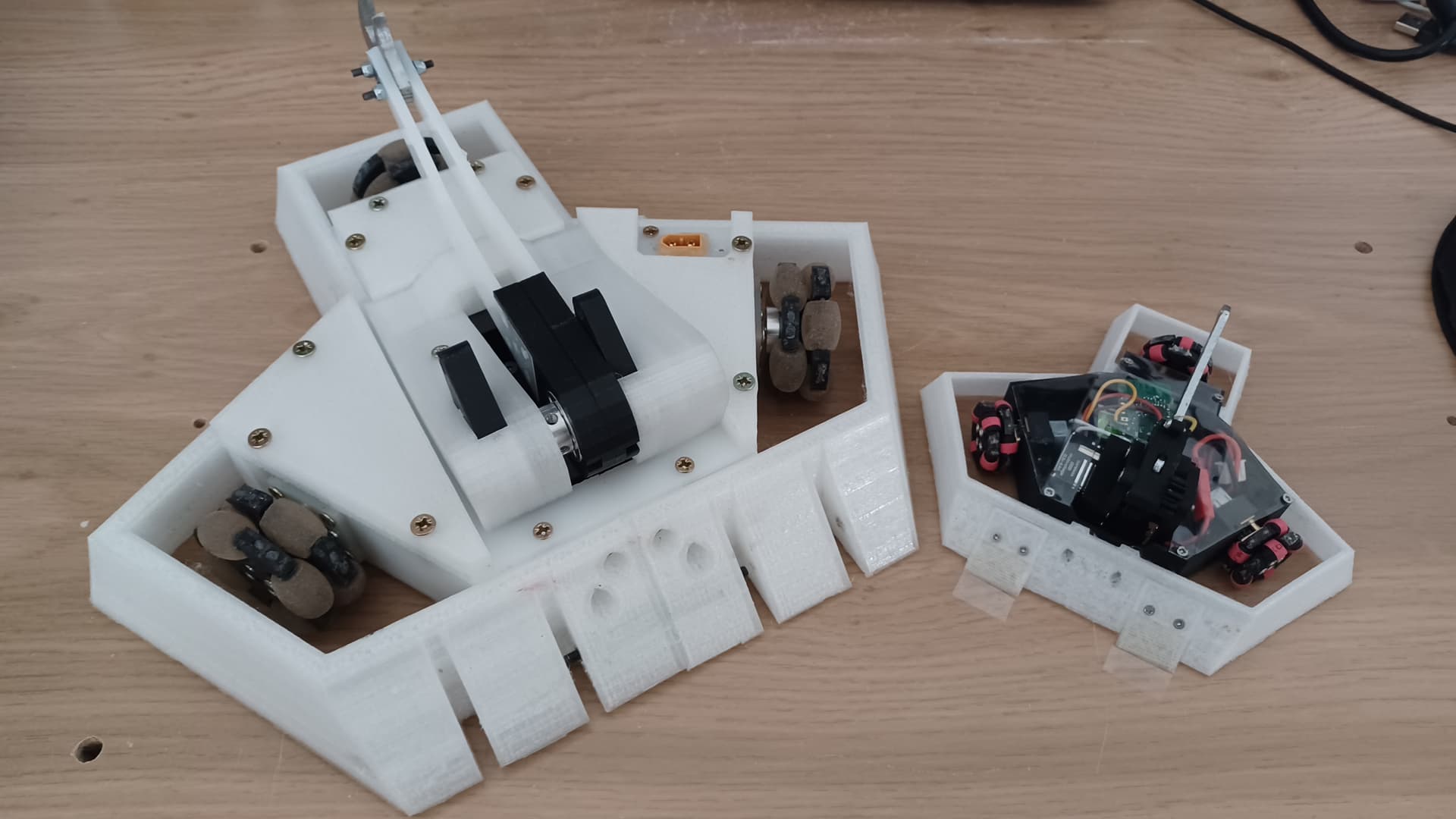
I went to Sub Showdown last weekend and had a great with with Percussive Maintenance XL. For those who don’t know, it is a kiwi drive axe bot, a fusion of two of my antweights, Stack Underflow (kiwi drive undercutter) and Percussive Maintenance (A series of axebots). Immediately upon getting back home from that, I started CADing an antweight version!
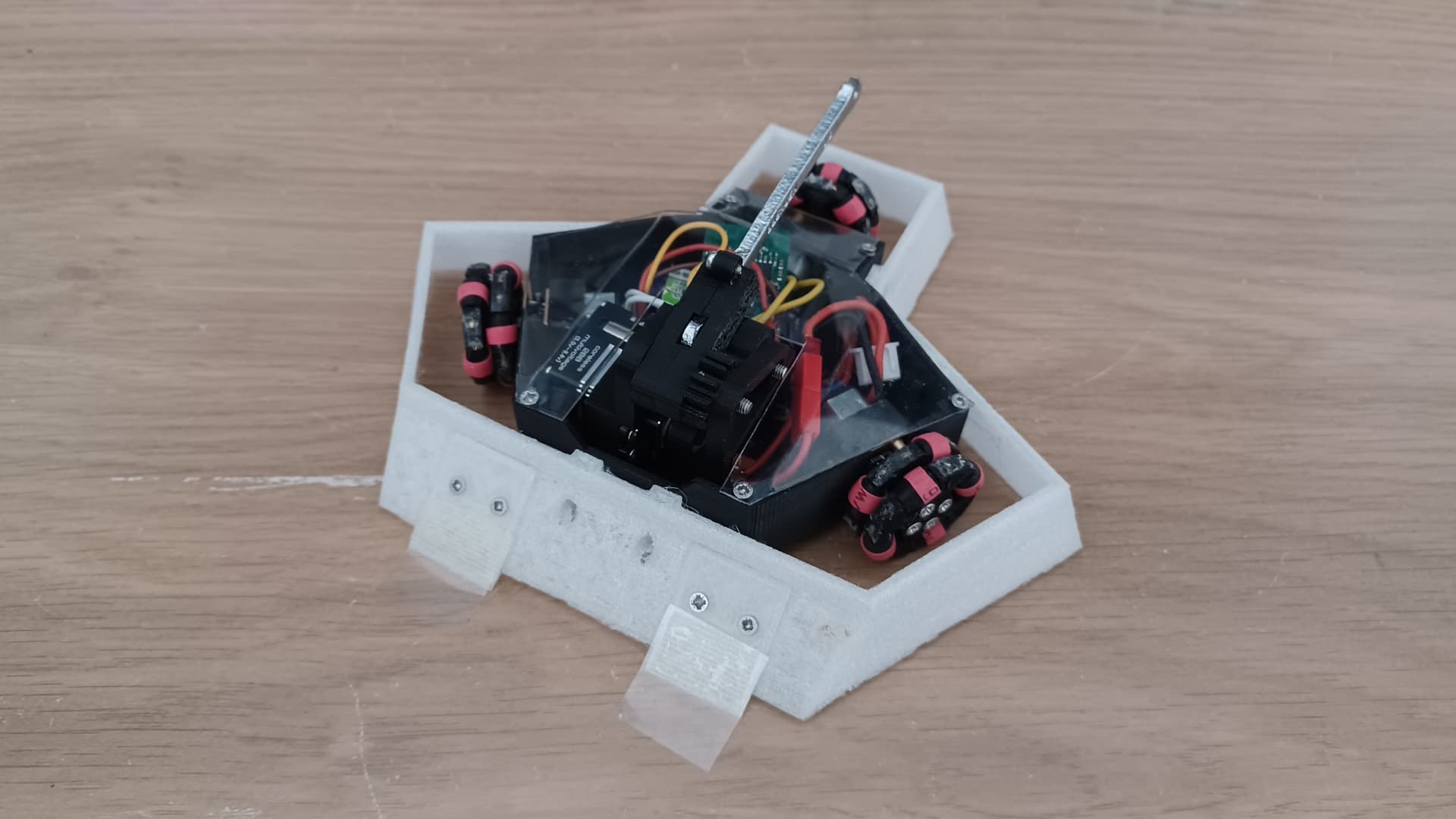
The whole thing is 3D printed out of PLA-ST (black) and TPU (white), and is a 1/2 scale version of PMXL! In order to make weight, material has been removed from a lot of places, so details such as the thickness of the skirt is not the same, but the external dimensions are exact.
I’m running N10s for drive and a Kingmax KM1203MDT with a 4:1 reduction for the axe. And yes, that is a mini-spanner for the weapon - it’s a theme that I’ve kept throughout the whole series! All the control is done with a Malenki Nano, with mixing turned off so I can do the proper kiwi drive mixing on my transmitter. The rear wheel runs off the brushed weapon channel, so it has no braking, so this setup is a bit of a hack, but is the lightest solution out there.
This should make its way to Robodojo at the end of the month alongside my beetles PMXL and DJ2. It is the first antweight that I’ve made that does not fit the 4 inch cube, so will not be able to run at AWS.
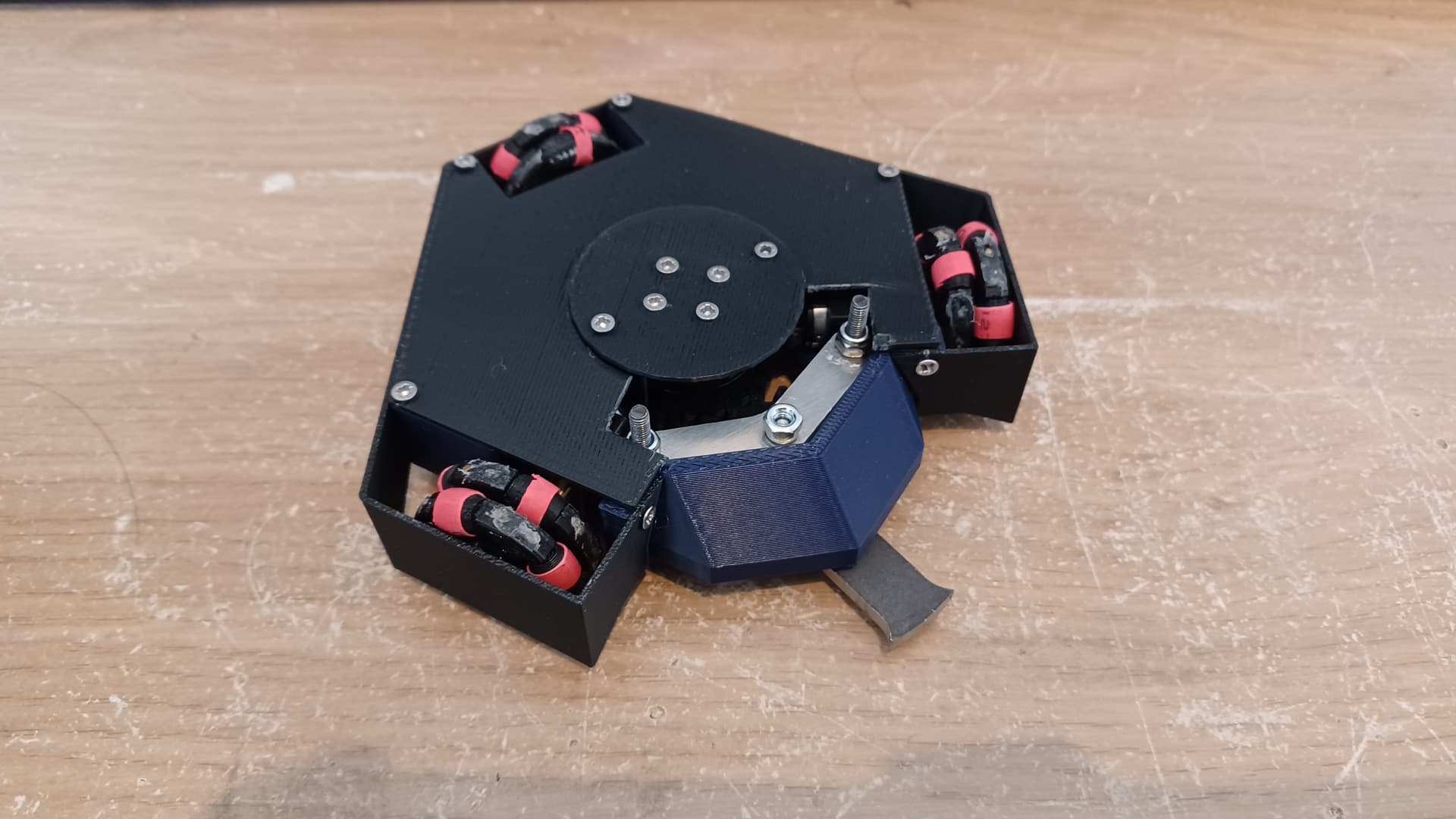
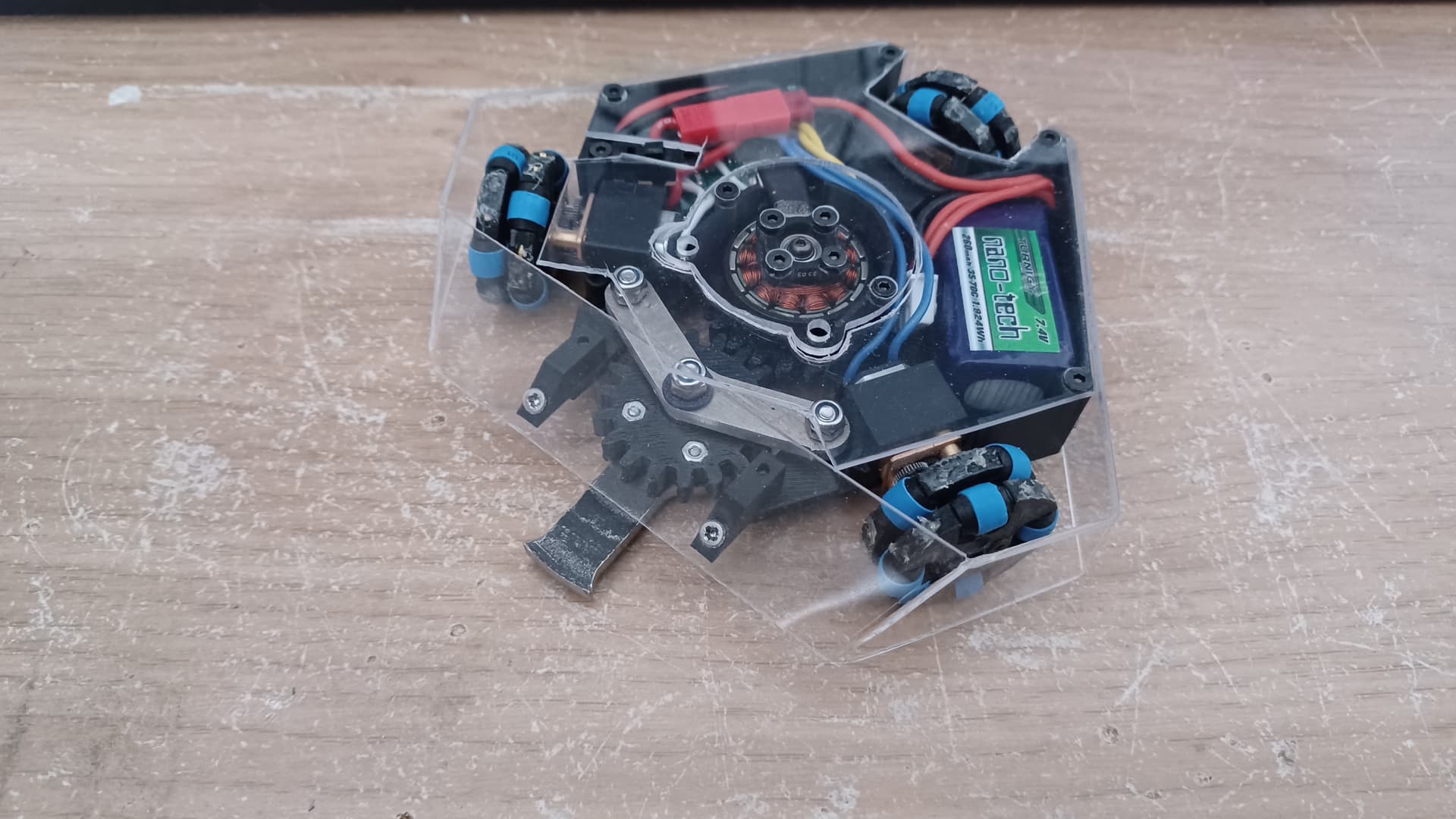
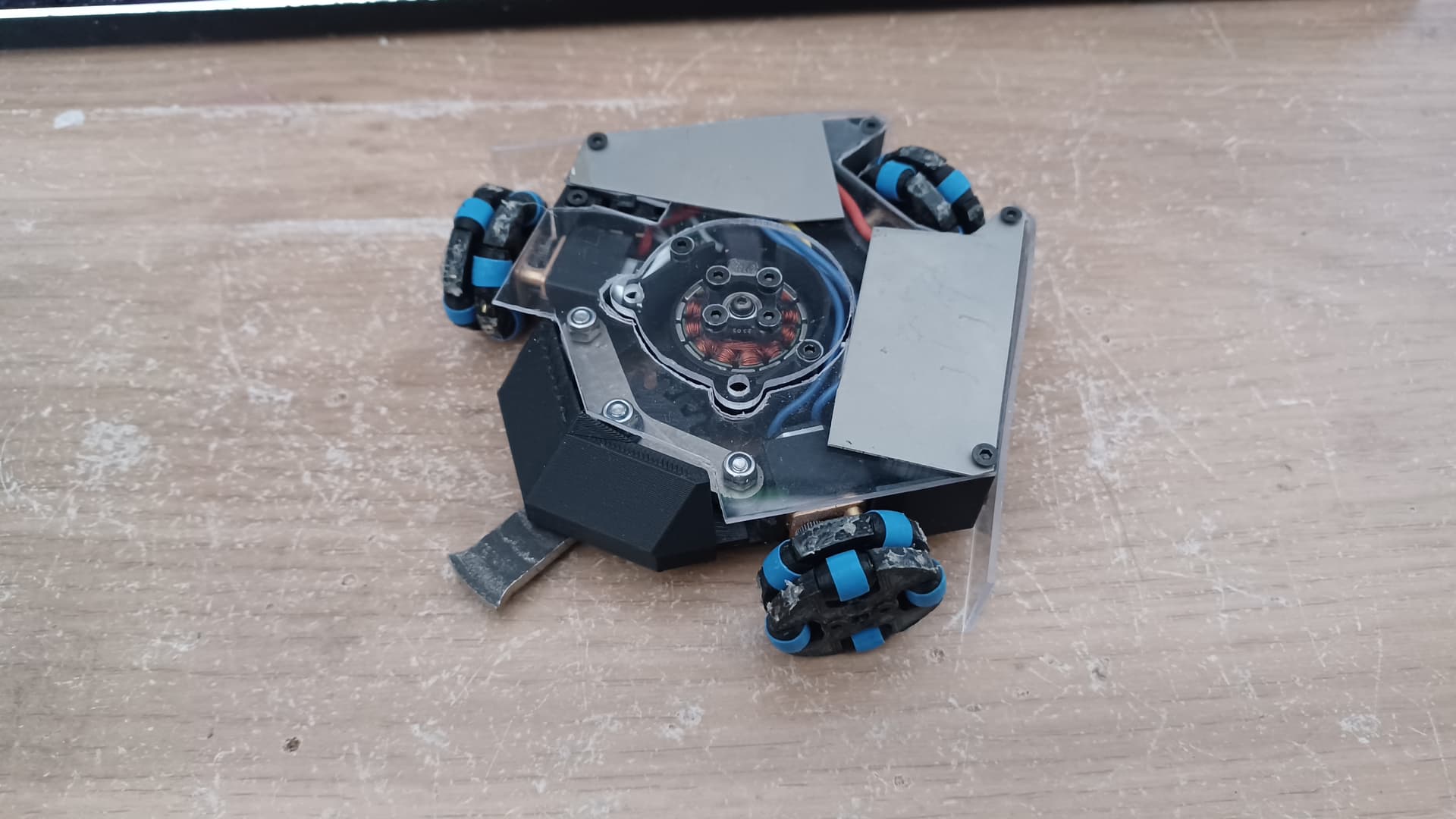
I’ve been pretty inactive with ants this year, with most of my efforts focused on my beetles, but with AWS 72 coming up I decided to actually get round to building Stack Underflow V2. For those who haven’t seen it, here’s V1:
This actually served as a test bed for my foray into kiwi drive and is the only spinner I’ve buiilt to date. After a handful of events in 2023 I stopped running it as I kept on losing weapon motors to weapon-on-weapon exchanges.
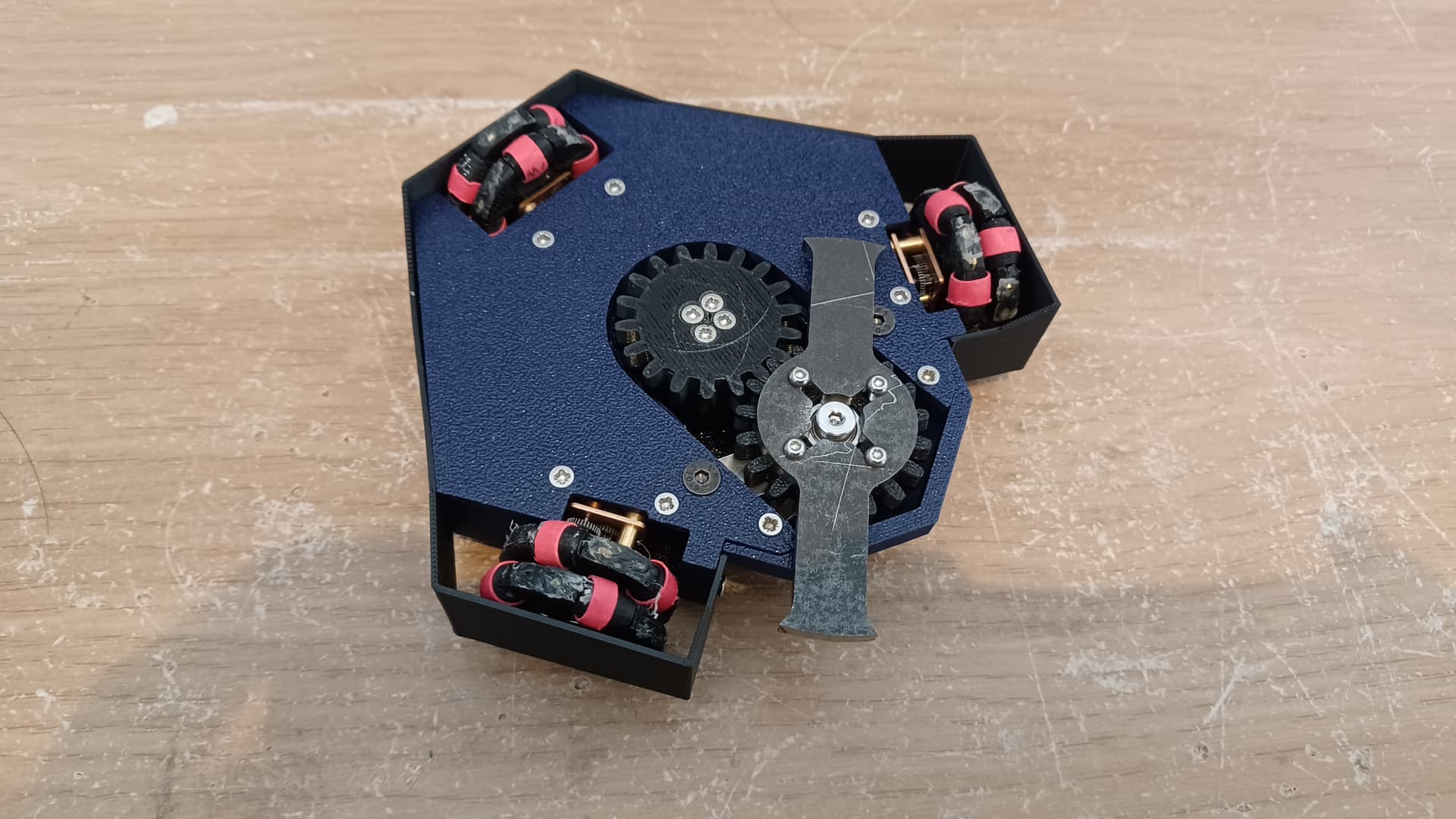
V2 intends to address that by moving to a gear-driven weapon, adding a buffer between the business and and the motor. Doing this also had the side effect of allowing me to push the bar further out in front, gaining a few mm of reach:
Anti-horizontal armour, 1mm poly. I’d like to go thicker but I’m quite close to the weight limit and I don’t think I’d have enough for 1.5mm. The most aestheically pleasing of the configs imo.
There’s nothing going on on board the robot itself - it’s just using a Malenki Nano with mixing turned off, where the rear wheel is bodged using the brushed weapon motor output (so no brake). Then the mixing is all done on my transmitter, a Radiomaster Zorro which runs EdgeTx. Then the maths is basically just this: language agnostic - How to control a kiwi drive robot? - Stack Overflow