Battle In The Burgh 4:
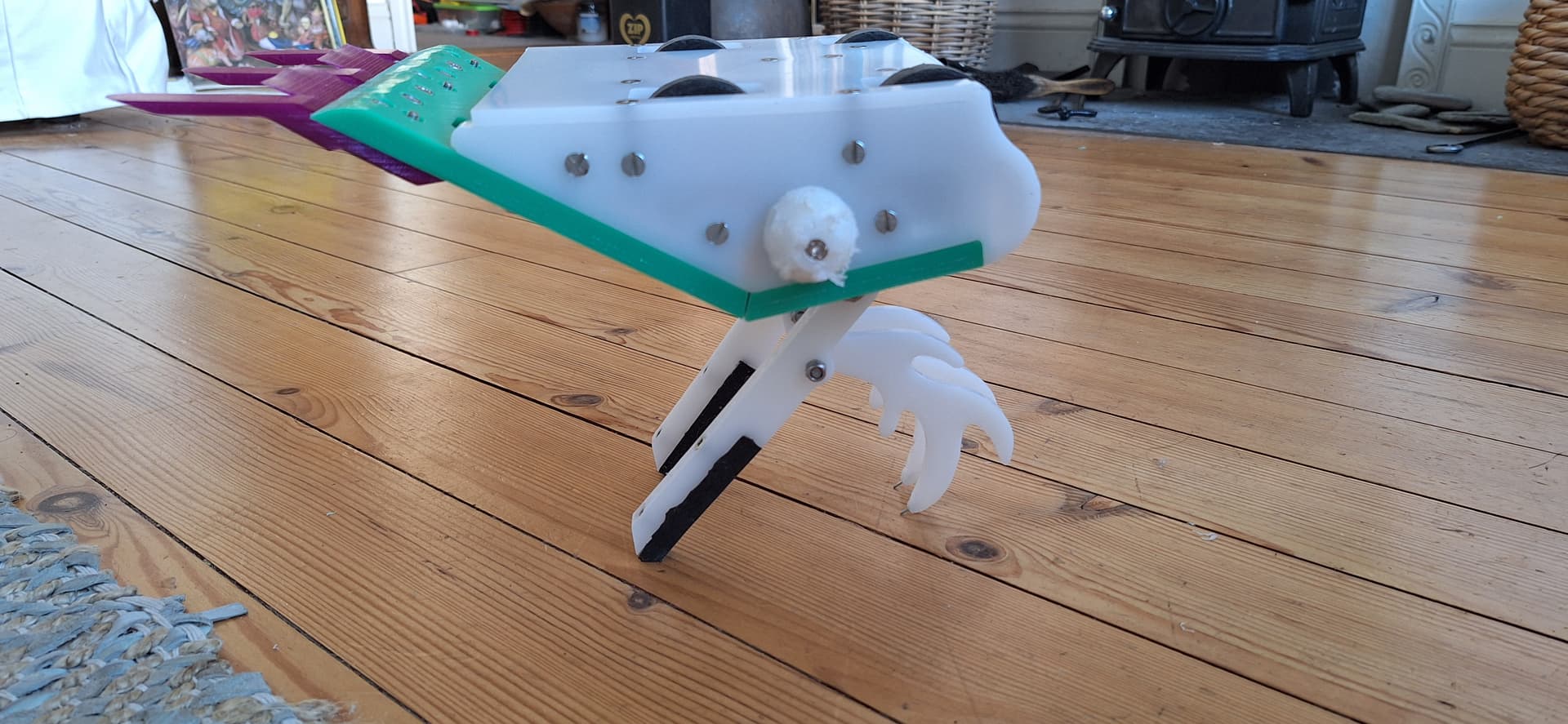
My final event for 2024 was one that had been on my bucket list for a long time, Battle In The Burgh. Any excuse to go to Scotland was always appreciated (helps to have family in Edinburgh to stay with!), and the idea of a multi-day event always appeals to me. Unfortunately this iteration of the competition had to be shortened down to a single day, but the field still seemed like a super interesting one, with a lot of heavy hitters and robots you usually don’t see as often in English events. Babróg went over almost literally untouched from BBB Champs, save for a quick once-over of everything to replace any cracked prints, clean out any pulleys, and to tighten or replace any screws needing attention.
The format for BITB 4 (or “Burgh”, as the cool kids would call it. Allegedly. Possibly.) was a fight night format, where every robot would compete in three 1v1 matches, drawn at random at the start of the day. Points were awarded for wins, and victories via judges decisions were worth less than KO’s. From there, the top 16 scorers would move on to a single-elimination bracket until a winner was crowned. There would also be a tag-team competition available for those who were knocked out before the top 8, so based on previous pedigree I was a shoe in for taking part in that.
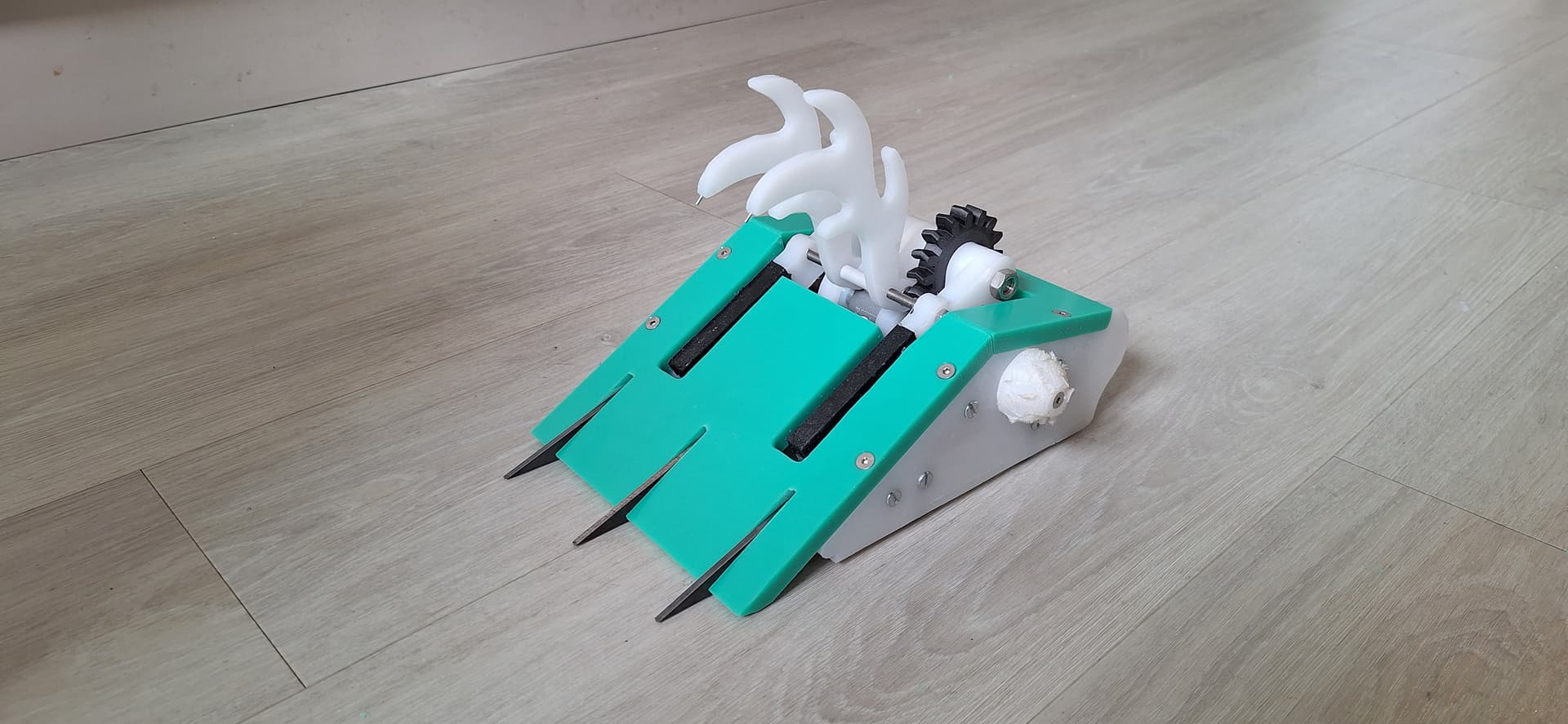
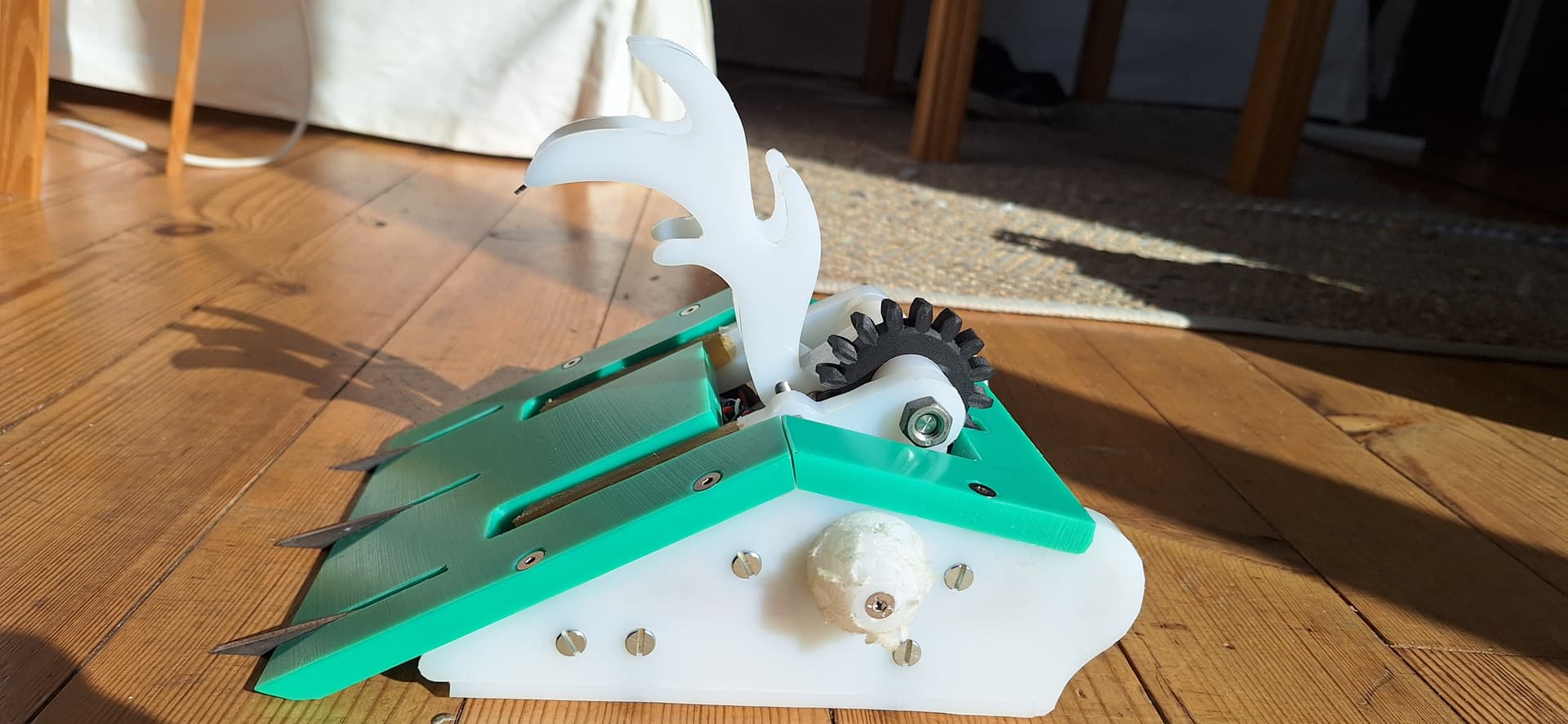
Babróg ready for its first fight!
Fight 1 Vs. 3 Robots In A Trench Coat:
Fight starts at 00:00.
My first match was against my pit neighbour, 3 Robots In A Trench Coat, a modular design capable of swapping its internal components between three different armour and weapon configurations. I was actually asked by the builder Alys which config she should run, and I answered honestly that the wide TPU config would be the most effective in getting underneath and beaching me. This would also be a solid test for my new TPU wedgelets config in how effectively I could get underneath such a squirrely opponent, even when I may not have the reach advantage.
Some pretty intense back and forth between the two of us in this fight. Full credit to Reese from RBS Media for the fantastic fight photos!
This was a fight of sweaty palms for both of us I reckon. 3 Robots had an advantage in raw drive power, but this left the robot to wheelie quite a lot, even with a large magnet embedded in the central wedge. My main goal was to keep my front end pointed at 3 Robots at all times, as if they got around me, I could get pushed into the pit very quickly. Getting a solid lift on 3 Robots proved remarkably tricky due to its shape, as well as how often a wheel tended to be on the ground. This was one of my more boring drives, but control was the aim for me, and I felt like that was the major factor that pushed the fight in my favour. 3 Robots did manage some very nice slams on Babróg, and both of us danced around the pit numerous times, but ultimately it ended up going to the judges, and Babróg managed to start the competition off with a win.
Fight 2 Vs. Dearc:
Fight starts at 9:21.
My second match was against another control bot in Dearc, run by Chris Thompson, and designed by Ari Callister. Given that Ari’s other robot, Frenzy, had won the last competition I was at, I knew that Dearc would be a solid bot, and it’s a credit to Chris that he got the bot working as well as he did going into this fight after surviving a full distance fight against the nasty horizontal spinner Just a Wee Slice. Dearc would run its long forks in this match, so this would be another major test as to how well Babróg could perform against metal forks.
Me and Dearc coming together.
The start of the fight proved pretty cagey, I seemed to have a small advantage in the ground game, but I was unable to get a decent grab on Dearc, while they managed a single good grab on me, but were unable to convert it to anything major. I felt like I was starting to build some momentum in my favour, but unfortunately I seemed to lose a side of drive a little over halfway into the fight. All I could do at this stage was to keep my front facing Dearc at all costs, and this led to the one and only suplex I would achieve in the match. The fight ultimately went to the judges once more, and by a split decision, I had done just about enough to secure my second win.
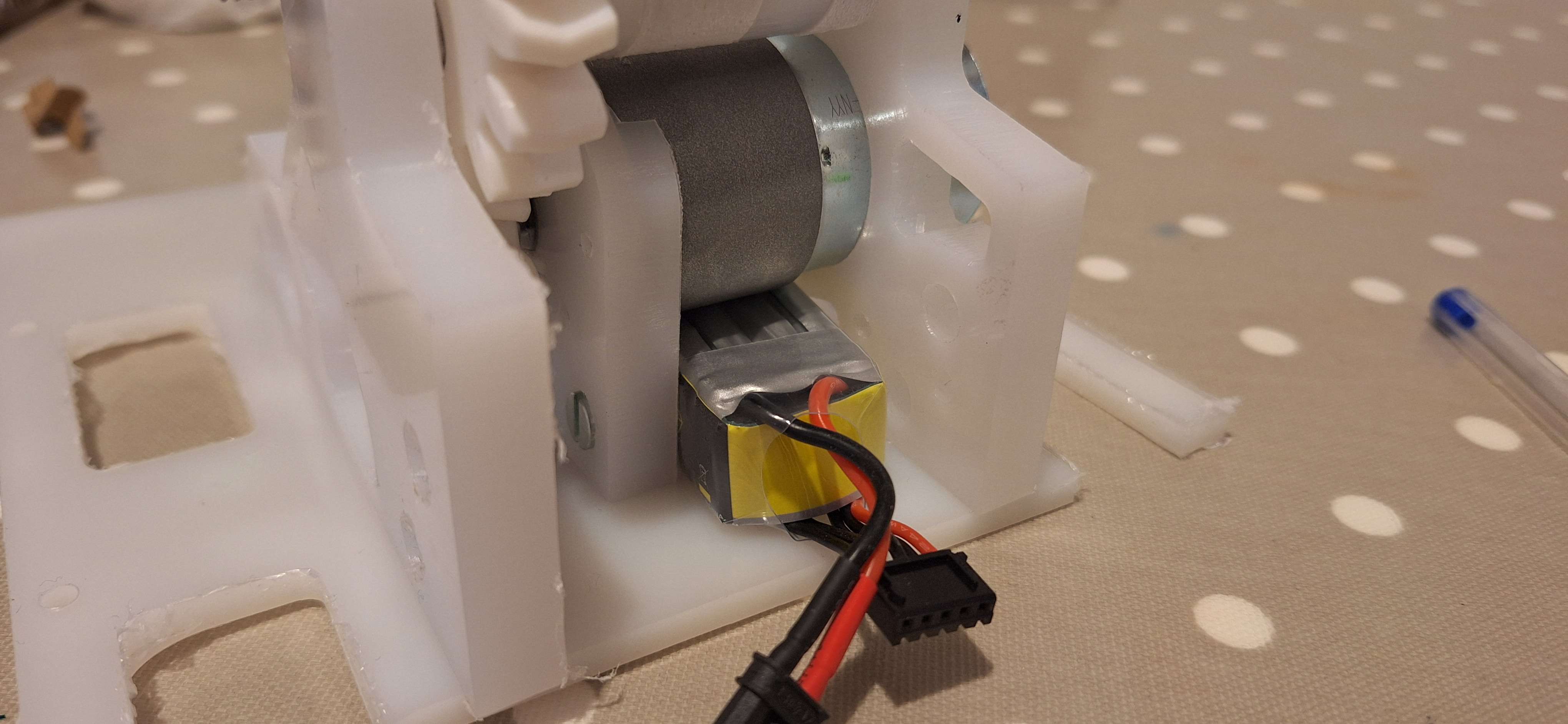
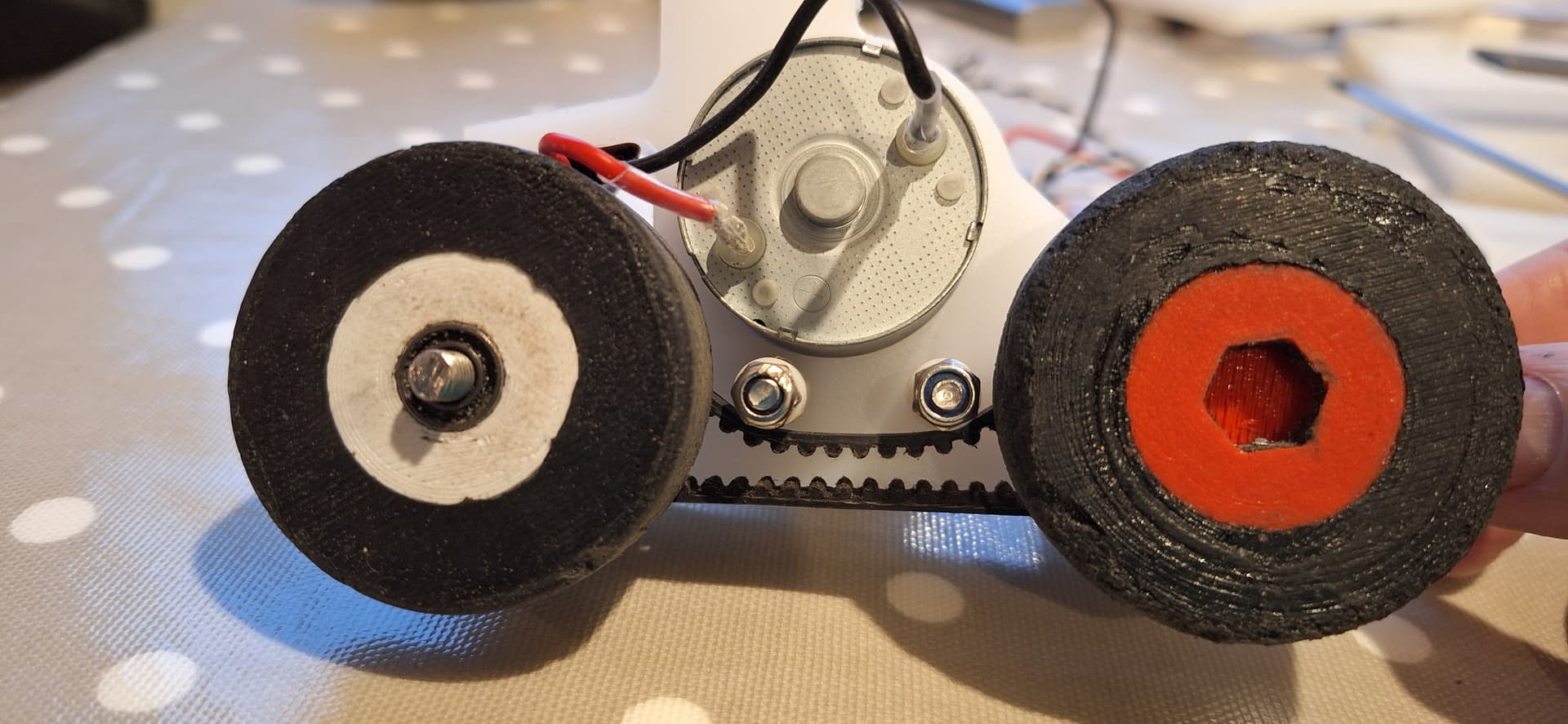
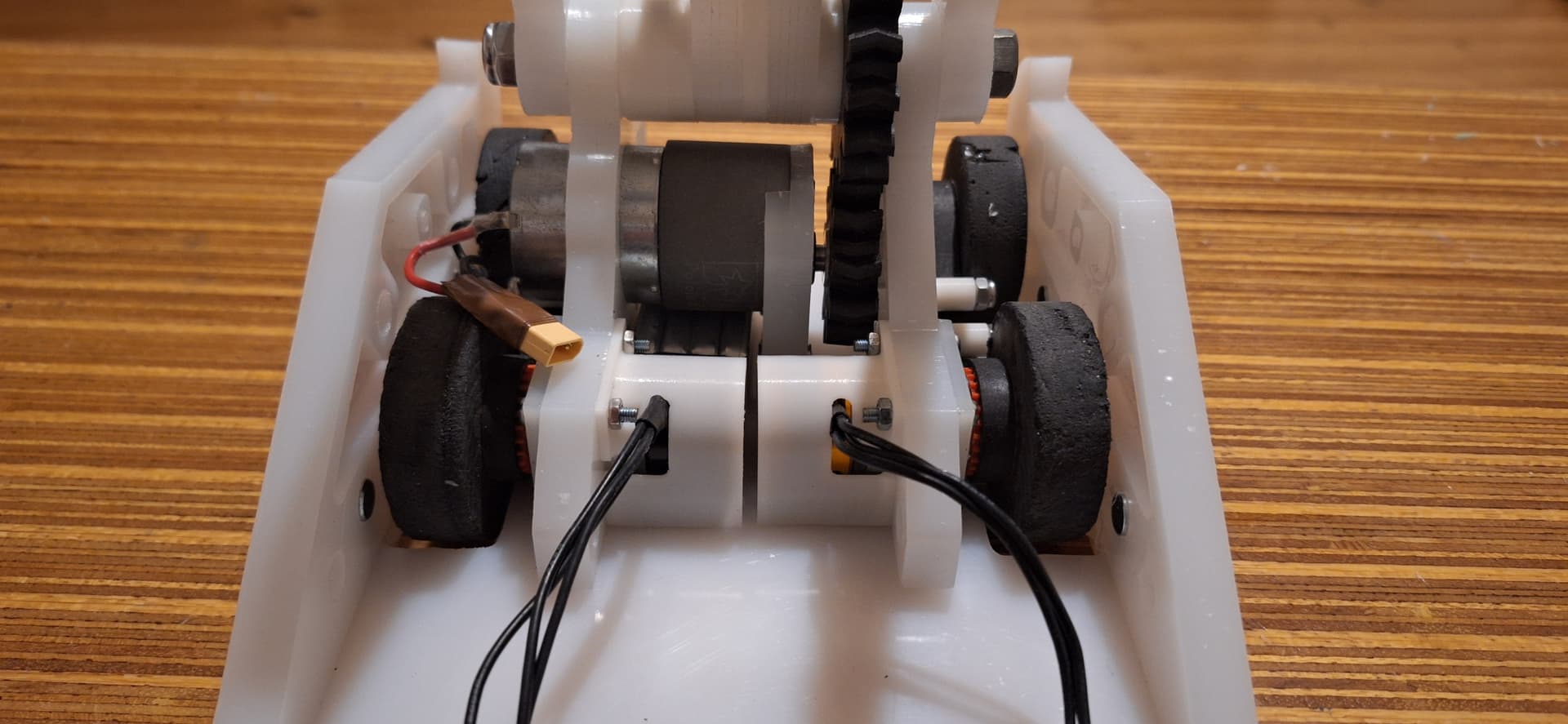
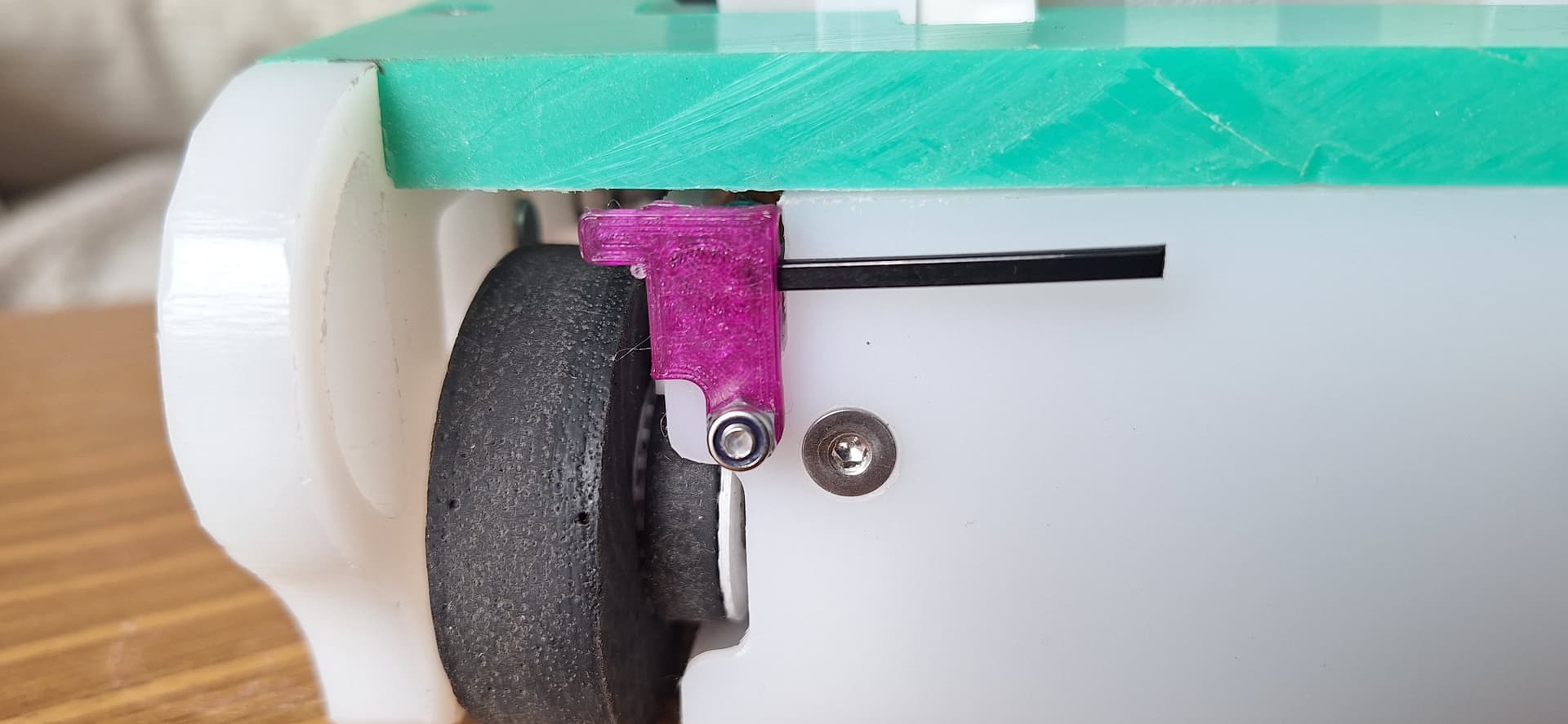
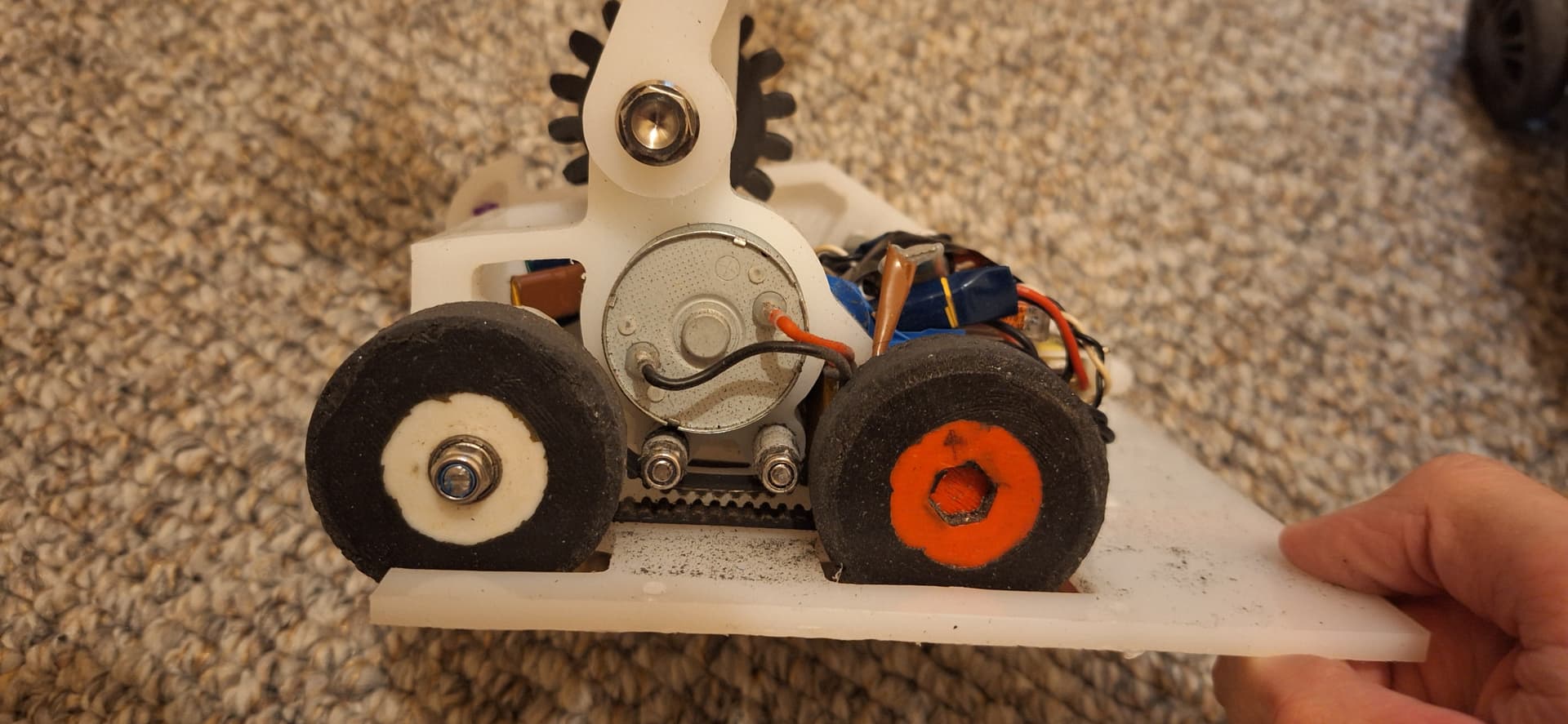
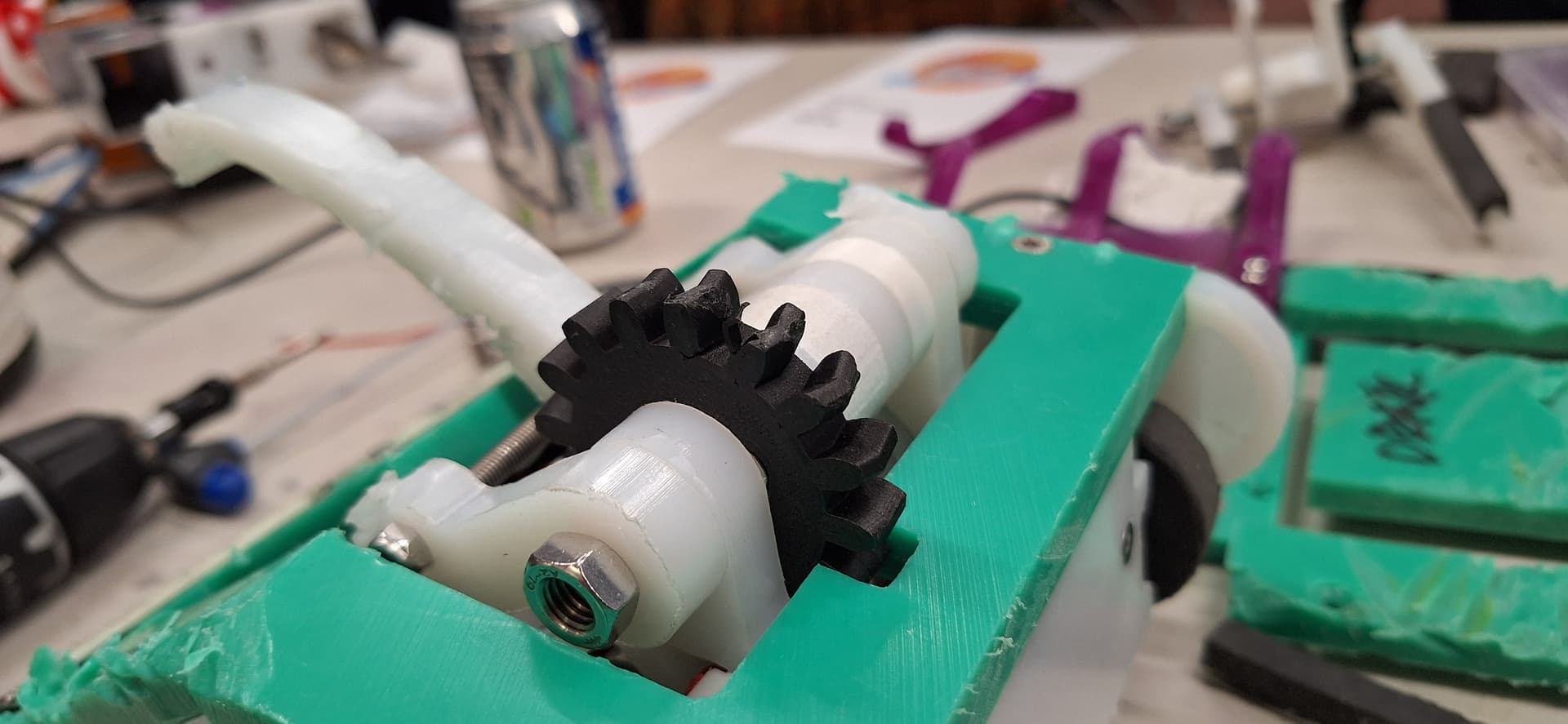
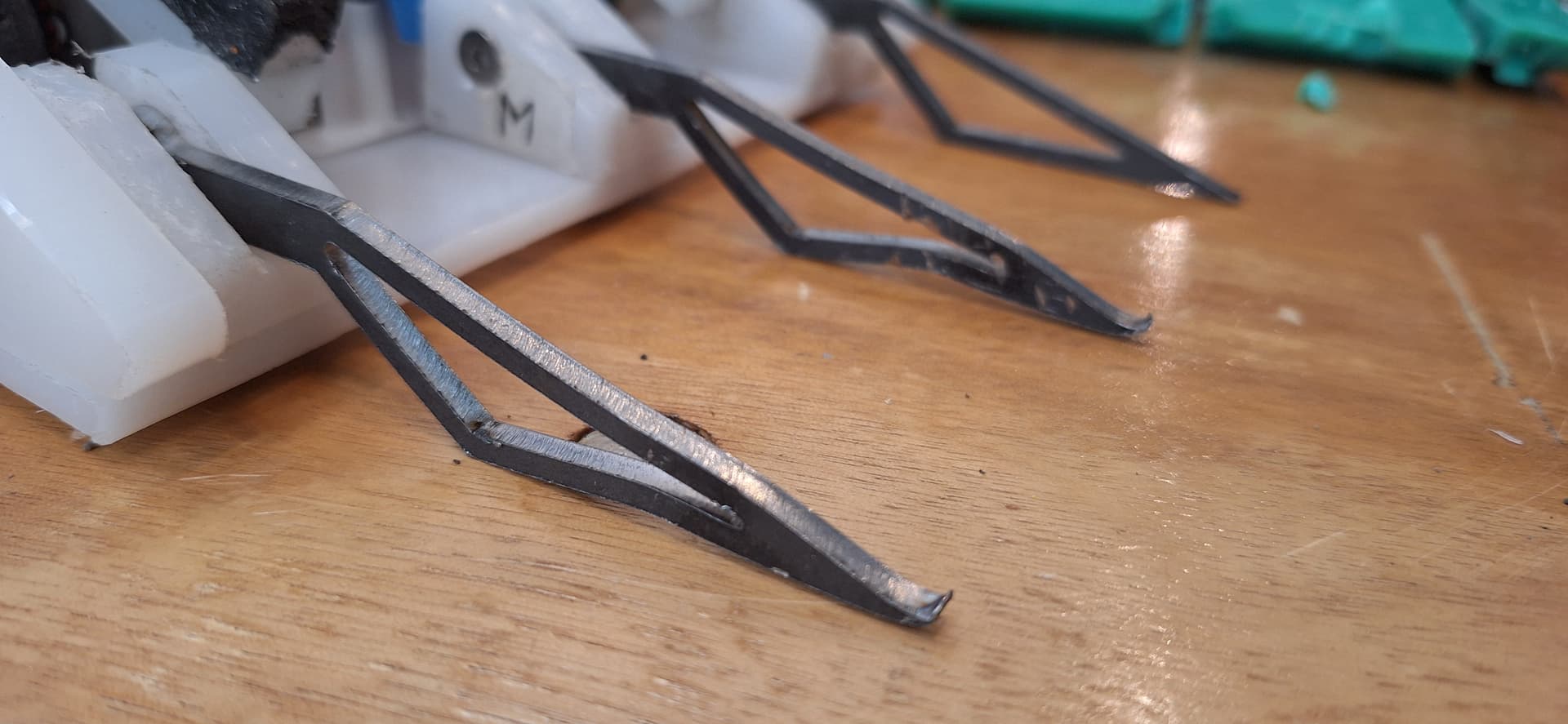
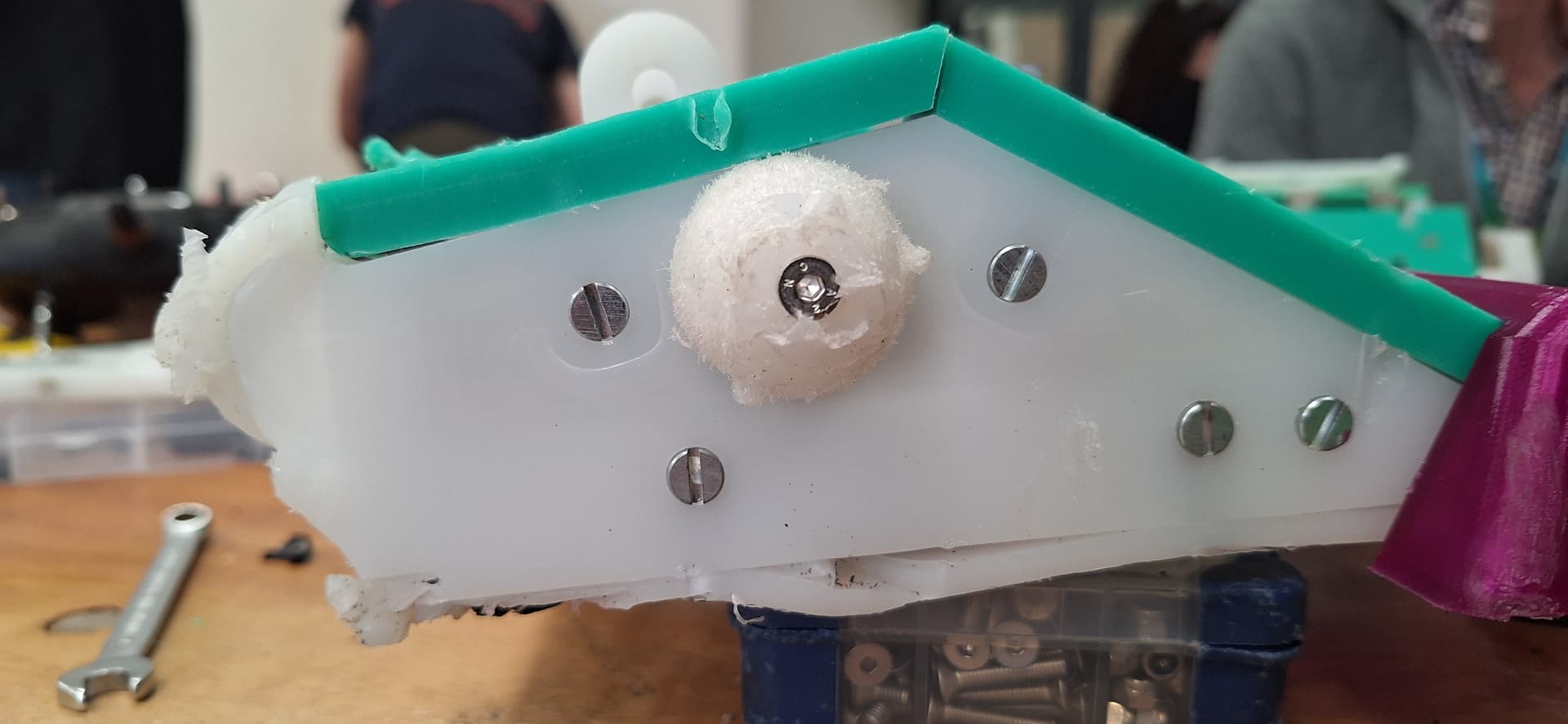
After the fight, I was left with the time-consuming process of dismantling the broken drive side and to see what was the issue. I finally discovered that the failure was that the metal teeth on the pinion gear had been completely stripped, removing the connection from the motor to the gearbox. On one hand, I was happy that the failure was not in the same manner as previous failures such as plastic gears failing or the pinion coming loose from the shaft, but this did have me wondering how much I could use each drive setup before they needed to be replaced. I do also suspect that the gearbox may not have been entirely centered on the motor, and that may have been a cause of the increased wear, but I feel like I would need to get some more data before jumping too early to conclusions.
The completely rounded out pinion. Trust me, getting this out was a pain.
Fight 3 Vs. Medusa:
“Fight” starts at 00:42.
My final fight night match was meant to be against Medusa, a very solidly built horizontal spinner. I saw this as a perfect time to test out my new TPU horizontal setup, although with all of the repairs I needed to do with the motor replacement, I was slightly concerned that I would run out of time to make it to the match. The repairs were eventually completed however, and I was ready to complete. Unfortunately, Medusa has sustained too much damage to its electronics in its previous matches, and so with my proof of functionality, I took a third win via technicality. Not the cleanest run of fights I have ever had, but I was happy to have made it in a very healthy state to the round of 16!
Fight 4 Vs. Daisy (the Cow):
Fight starts at 00:00.
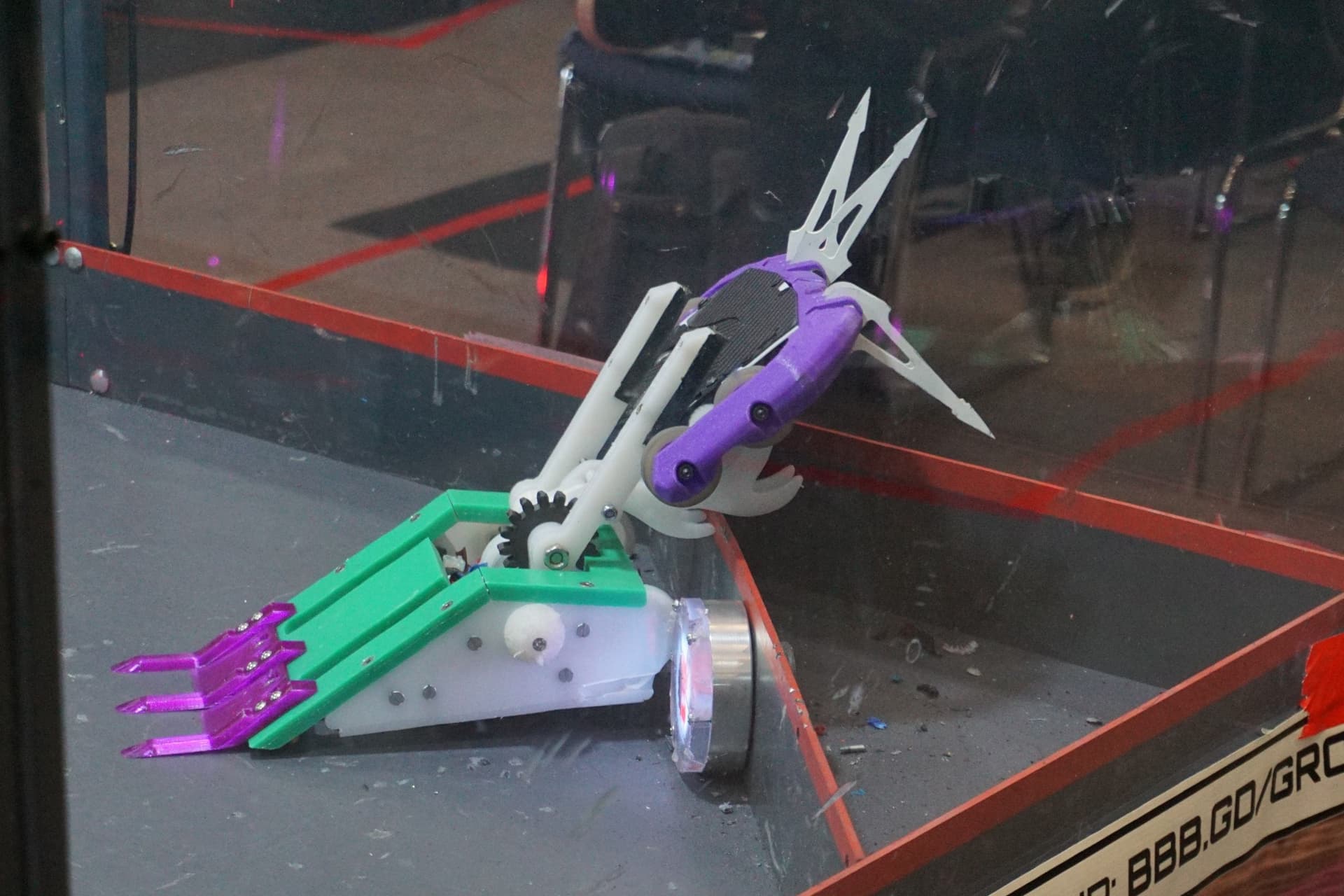
My top 16 match was against Daisy (the Cow), another lifter bot which interestingly ran a shuffler mechanism for drive, allowing the robot to be heavier than standard designs. From previous matches, I had noticed that while Daisy was invertible, it couldn’t use its lifter to self-right, so once I secured the first lift, I wasn’t going to go for another unless I knew I could take full advantage of it. I had one scary moment near the pit where my fork nearly got stuck on one of the lips of it, but I managed to free myself. Eventually I got another nice lift, went for the pit button, but instead managed to suplex Daisy out of the arena, scoring my first suplex OotA and making it past the top 16 for the first time in one move!
Fight 5 Vs. Just a Wee Slice:
Fight starts at 7:59.
My quarter-final matchup would finally put me up against a spinner for the first time this tournament, and it was a nasty one in Just a Wee Slice. This horizontal spinner had put basically all of its weight possible into its weapon setup, and had landed some nasty blows against other competitors, including fellow control bot Bubblegum Lift which it had beaten in its round of 16 draw. I was originally going to run the new TPU wedge against him, but after a short conversation with Thomas Weatherley of Baby Dead Bod fame, I decided to run my (slightly worn at this point) titanium wedge, a decision I reckon in hindsight was critical to my performance in this battle.
A lot of dynamic shots from this fight!
Right off the bat, I noticed that Just a Wee Slice was bouncing off the titanium wedge as opposed to the plastic, which was a major confidence boost for myself. While dangerous, at certain speeds, I could almost “dribble” Just a Wee Slice around into the arena wall to slow it down, and the more dramatic hits it would score against me wouldn’t do any lasting damage. The static grabber arm was taking the hits just like it should, although I was certainly taking more and more damage to the lifter forks, and even the lifter gear as Just a Wee Slice kept ricocheting into the taller parts of the robot. Eventually, my lifter mechanism was actually disabled, though I was still able to corral my opponent thanks to the static arm, and I started to get better at keeping Just a Wee Slice under pressure while it tried to get up to speed again. Once the pit went down, my chances of success went up dramatically, and after a few close calls, I finally managed to hook onto the rear of Just a Wee Slice, and with some careful driving, got them into the pit, securing a round in the top 4 in triumphant fashion!
Babróg finally getting Just a Wee Slice into a vulnerable postion.
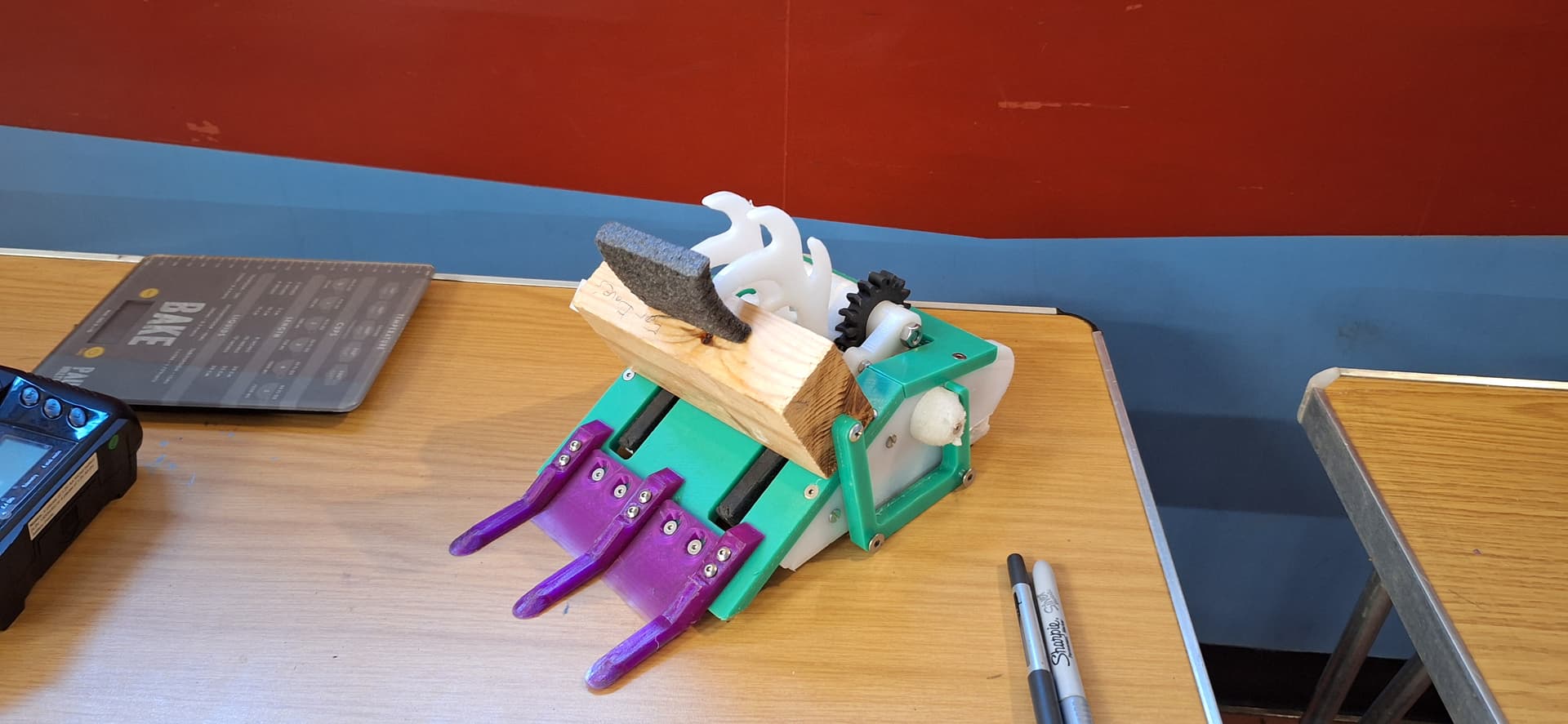
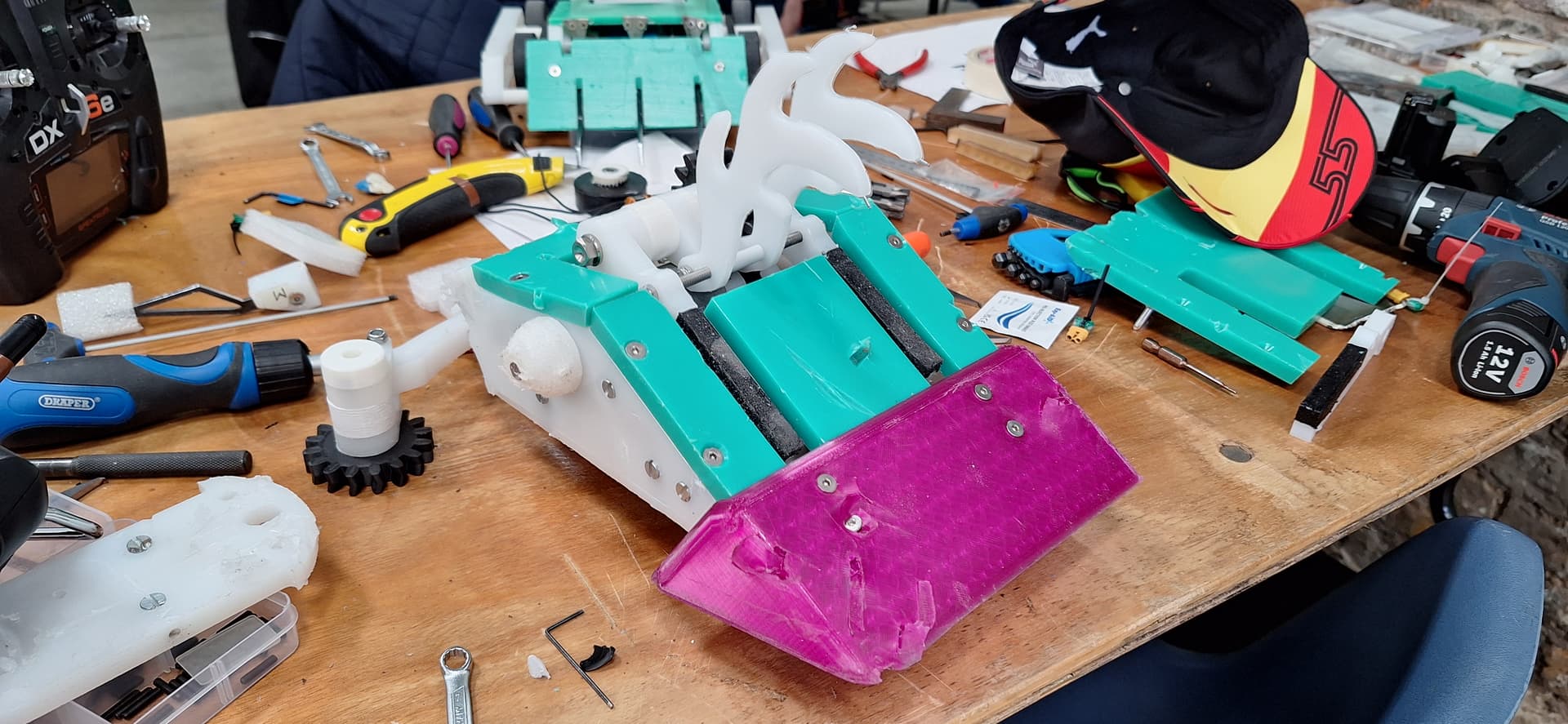
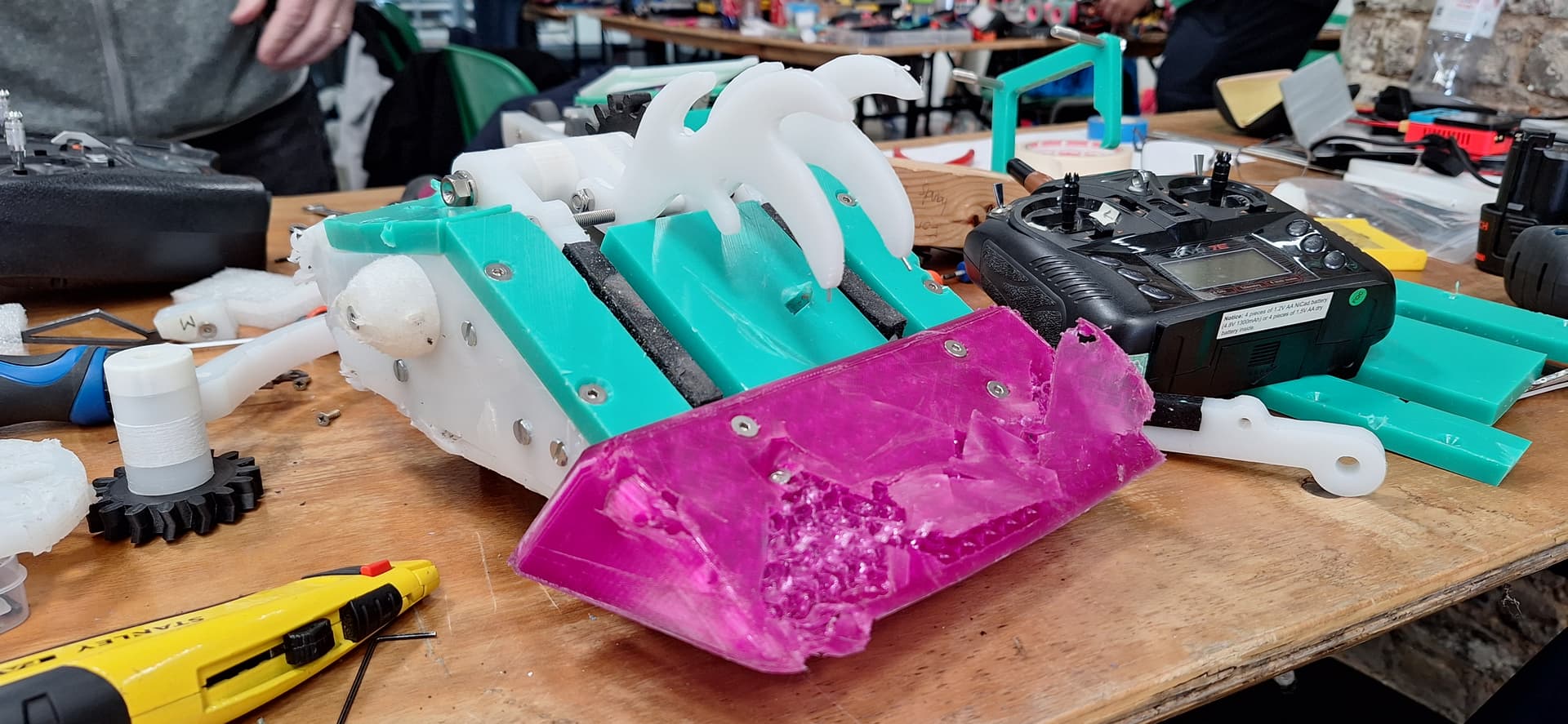
The damage in this fight was certainly significant, but most of it was exclusive to the horizontal config. There were plenty of slices into the top and side panels, but nothing some light carving with a box cutter couldn’t fix. The main lifter gear had actually cracked across some of the teeth, but none of the teeth engaged during a standard lift in that orientation, and I had a spare I could swap to anyway. The lifter forks had taken a proper beating, and the reason I lost the ability to lift was because one of the lifter forks had been bent underneath the front panel. This may have been an asset however; normally this config does not allow any grabbing motion, but because the lifting fork was stuck in place, I was able to bend the threaded bar connecting the grabbing arm to the forks just enough to bring the grabbing arm down on Just a Wee Slice, which is likely what made the difference in securing the win!
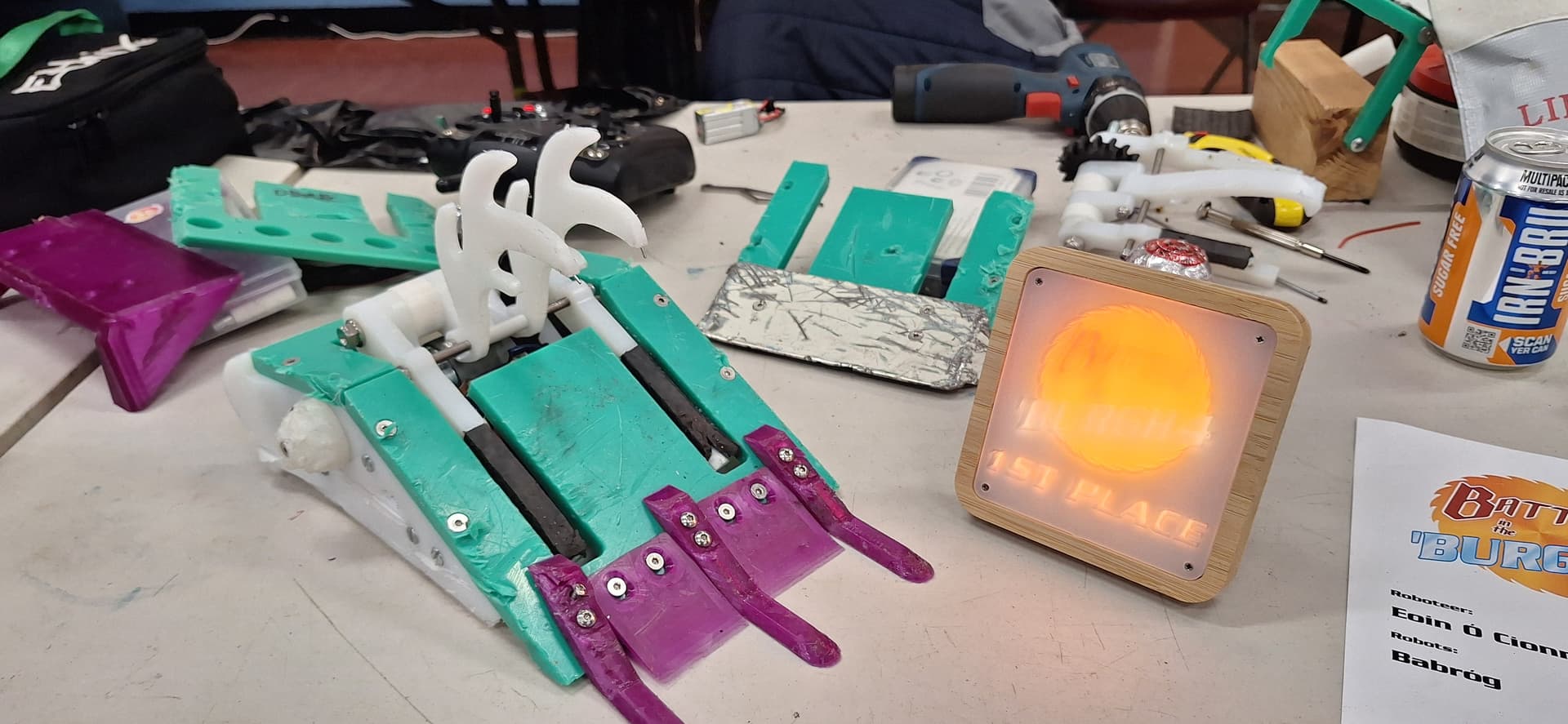
Some decent damage from the match, mainly against the front and top plates, the lifter forks, and the lifter gear.
Fight 6 Vs. Ray:
Fight starts at 16:04.
My semi-final match was against fellow control bot Ray, whose builder Pip was also having their own dream run in the competition. This would actually be a rematch from BBB Brawl 2022, where I managed to take the win via an early flipping, and controlling the match from there. Me and Pip have been friends for years, and I reckon we were both happy to have made it so far, and would both want to see whoever made it through to win. However, I regret to say that at this stage of the competition, once I flipped Ray, I had no intention of righting him, and so was able to control the match rather anticlimactically from there. Without a self-righter, Ray was unable to use that wedge to any effect, and after an OK lift I rather clumsily “suggested” Ray out of the arena. Probably one of the lamer fights in my career, but it was wonderful that we both made it as far as we had, and I tried to take that positive momentum into the final match of the tournament!
Potentially my lamest win, but flipping a wedge-y opponent after having a win all but assured has cost me a grand final position before, with Barróg Doom at the 2019 UK Featherweight Champs!
Fight 7 Vs. Prototype:
Fight starts at 19:51.
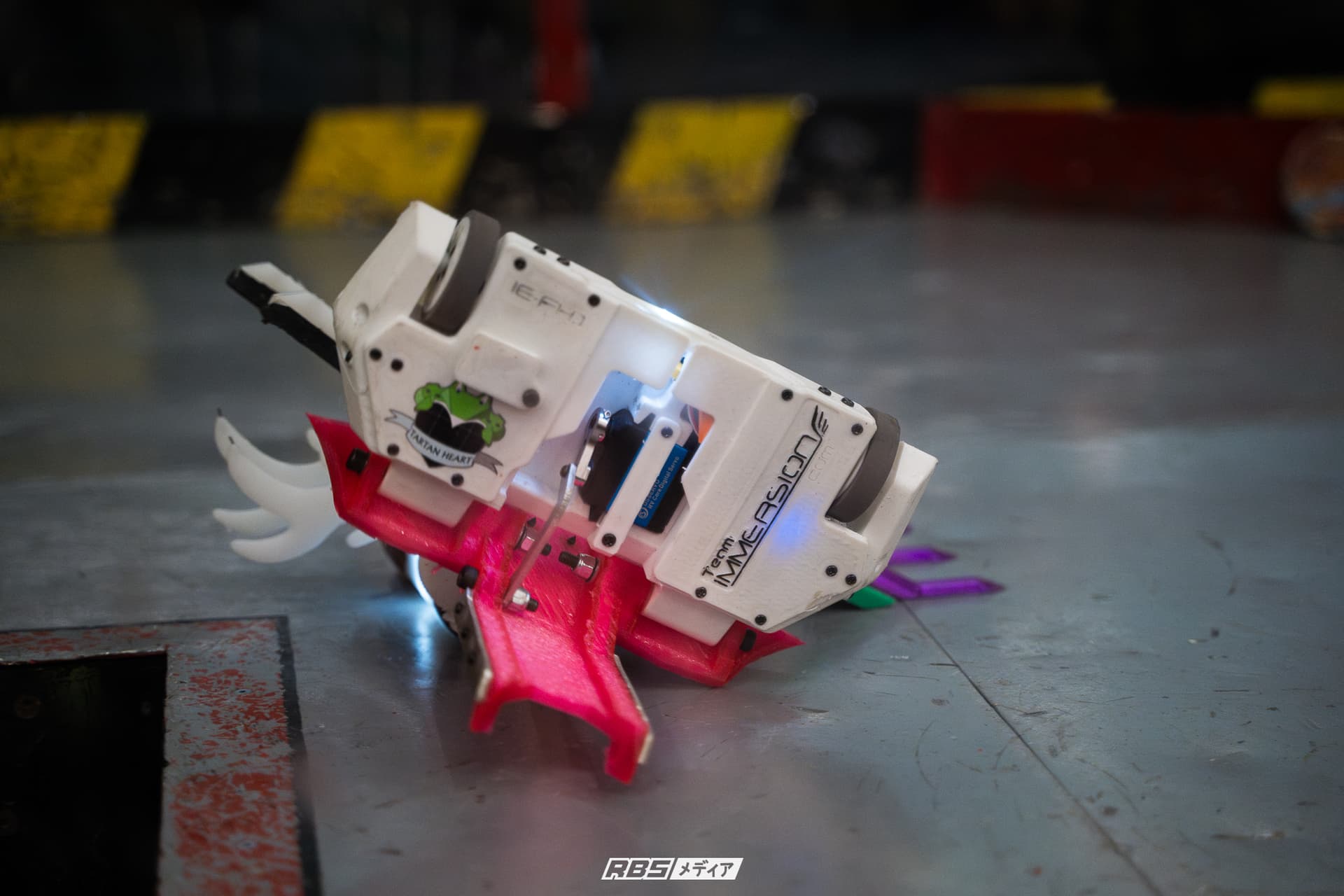
Typical to the rest of the tournament, my final match was against another control bot, this being the front-hinged flipper of Prototype. Designed to be a beetleweight version of Team Immersion’s design seen in other weight classes, this bot had been skillfully driven and maintained by Will Owen throughout the day, and was on the verge of taking a tournament victory at the first time of asking. From previous experience I knew these robots tended to have an incredibly effective ground game (just ask any of the wooden floors these bots compete at), so this would be the ultimate test to see if my new TPU forks could keep up with the best.
Two control bots duking it out.
The fight started relatively evenly, with Prototype likely having a small edge in head to head engagements, though we were both quick enough to avoid any major shoves from the other. Eventually I get a nice suplex on Prototype and am able to pin them while upside down for 10 seconds to buy me some time and secure some points from the judges. Things seemed to be going well for me, but then unfortunately I end up getting a fork stuck under the pit, and Prototype immediately goes for the pit button as a result. I was trying everything I could to try and free myself as the siren was going down, but fortunately, the half-second where the latch under the pit releases and the flap falls was just enough to drive away, despite Prototype’s best efforts. I’m then able to get a suplex off of Prototype and guide them bit by bit into the pit, securing the victory and taking my first overall event win in the beetleweight category as a result!
Potentially “the money shots” of the tournament, certainly for Babróg at least!
Fight 8/Gladiator:
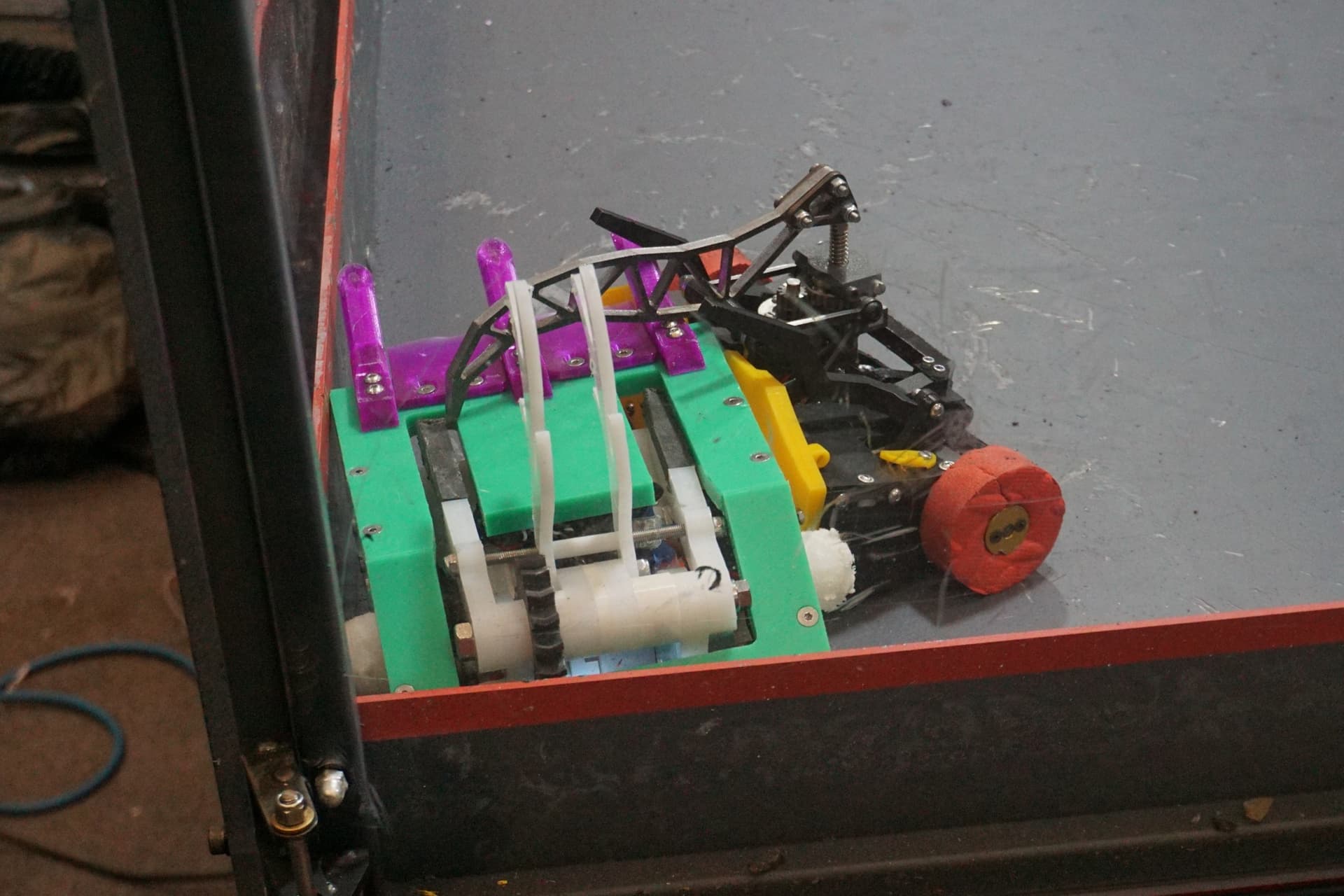
I was already ecstatic from taking the win, but as soon as we were unloaded from the arena they were already packing the arena for the final fight of the event, a gladiator where the last robot moving would take the win. Eager to see how well the standard config would fare against horizontal spinners, and to see where the limits are of the smaller battery, I decided to throw Babróg back into the arena with no modifications from the last fight, not even a battery swap.
So much happened in this fight that it was honestly hard to keep track of it all. Babróg managed to get several suplexes on opponents, and took some direct shots from horizontals with minimal damage outside of some bent bolts. I was trying to drive conservatively to save the battery, but whenever an opportunity presented itself I seemed to have enough pushing power throughout the match. Eventually the fight came down to a three way battle between myself, Just a Wee Slice, and 3 Robots, and despite a few direct hits, I was eventually able to get Just a Wee Slice stuck in a position where it couldn’t drive back down. Unfortunately after some back and forth shoving with 3 Robots, they managed to shove me down into the pit and take the win. Would have been nice to have won to complete the clean sweep, but I was just amazed that Babróg had made it as far as it had on only a 380mAh 4S battery!
Babróg post-gladiator. No photos of the bot in between the final and the gladiator, but no damage was suffered in the grand final, so a comparison would be pointless.
Conclusion:
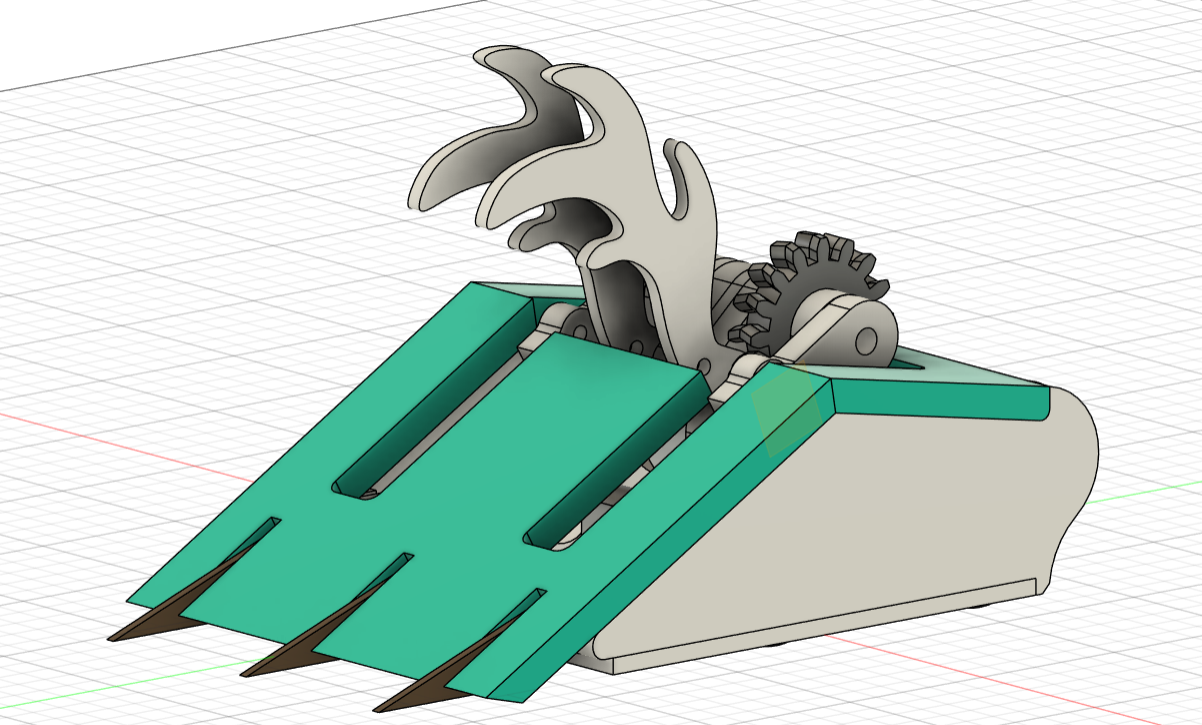
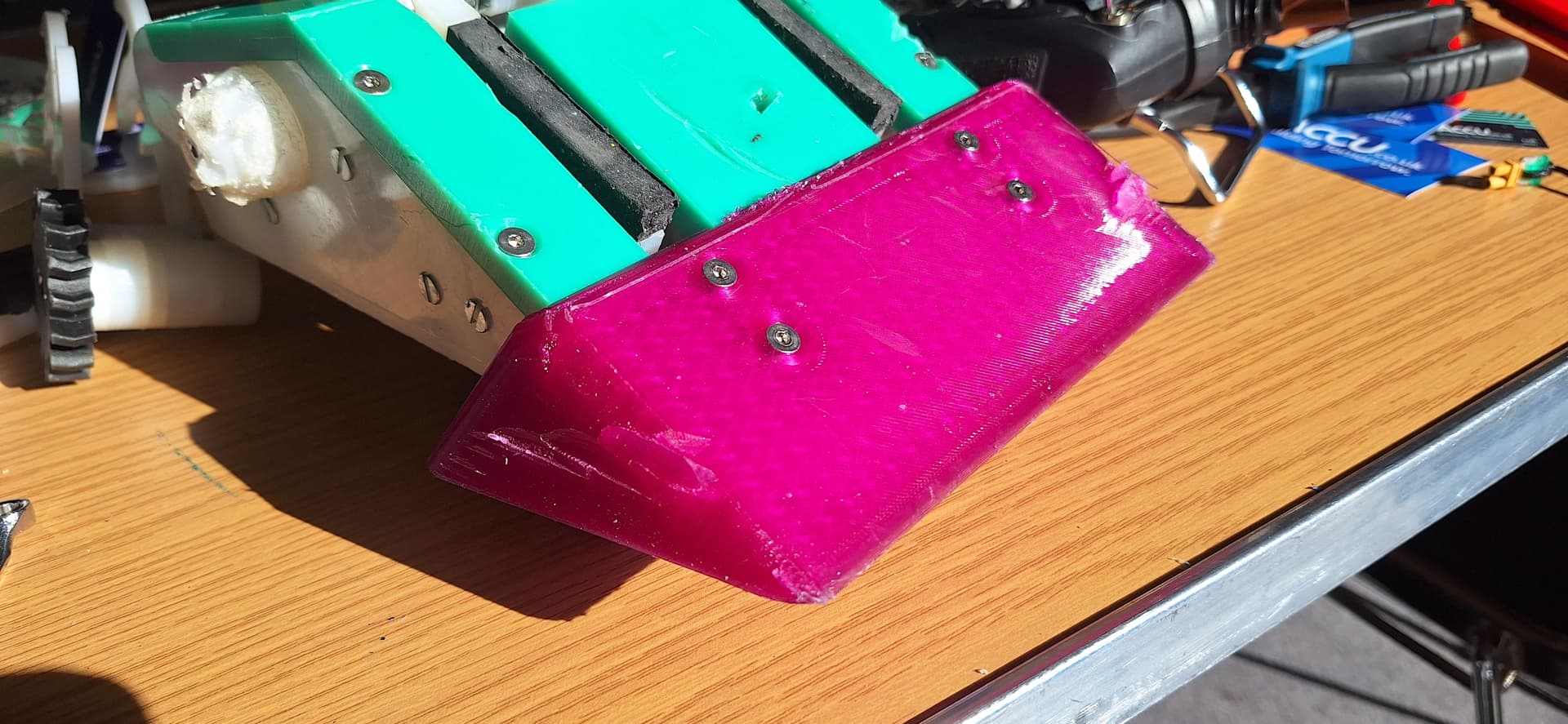
Battle In The Burgh 4 went about as well as it could have for me, and I was just absolutely delighted to finally have a decent result under my belt, and be able to justify so many of the design decisions I have made over the past few years, particularly with the new Babróg. The lifter continued to work wonders, often able to lift two opponents simultaneously, and although the 37mm brushed motor would likely be the first place to look if I wanted to save weight, I’m happy to stick with it given its power and reliability, at least until the brushless equivalents become as dependable. The TPU wedgelets perform exactly to my needs as of right now; they scraped the ground without impacting mobility too much, were durable even when taking hits from horizontal spinners, and could compete with a range of both metal and other TPU forks, wedges, and wedgelets, and all without having needed one replacement over the past two events. The drive also continues to provide sufficient control while remaining competitive in pushing matches, which is especially impressive given how many of my opponents were using more powerful drive systems such as Ranglebox Mars’ or Repeat Max’s, so I don’t have to worry about the headache that would be fitting these larger assemblies into Babróg just yet.
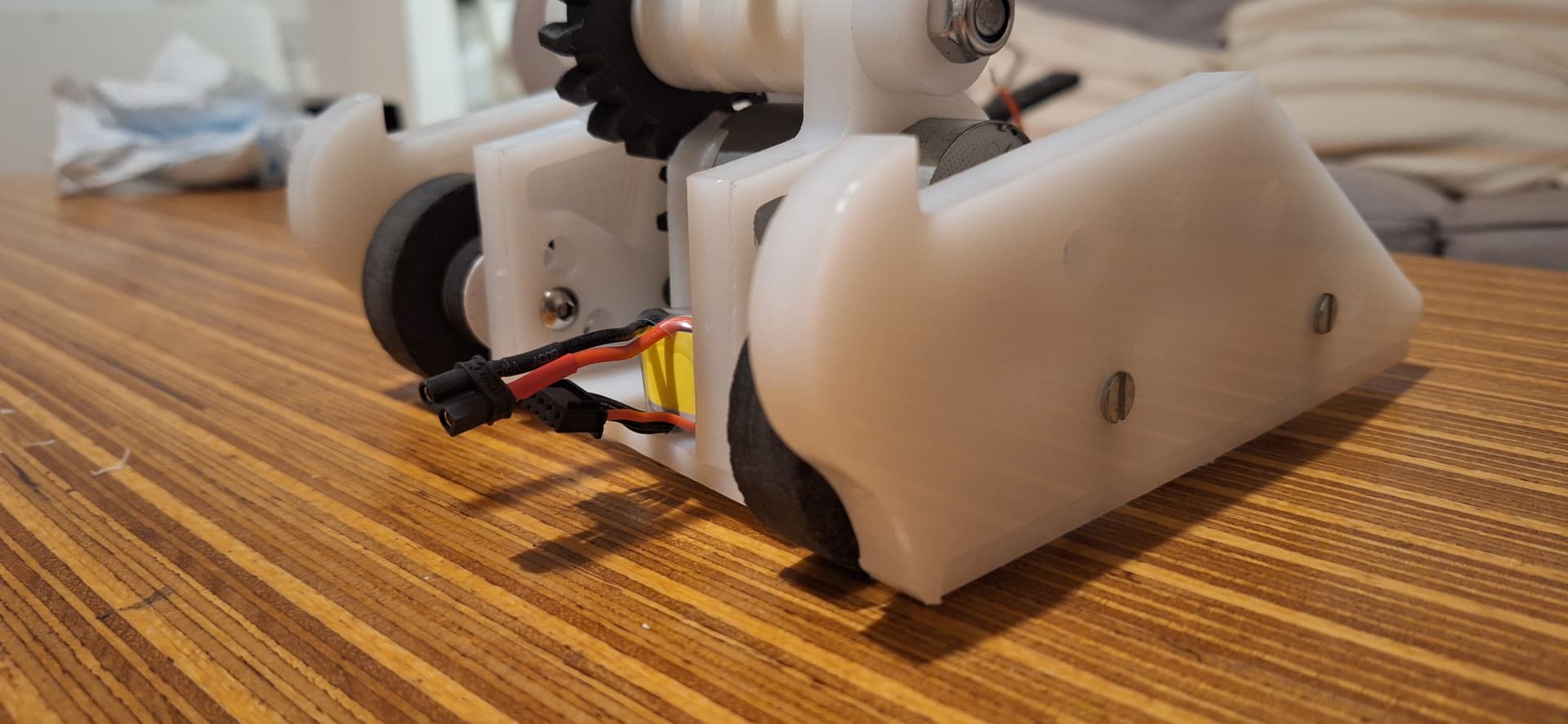
There are definitely some design considerations to keep in mind for myself going forward however. The only mechanical failure I suffered during this event was one side of drive going during the Dearc fight, which had been the first drive failure I had since I believe Brawl 2023. For the first time, the failure point didn’t seem to be down to plastic gears or an insufficient shaft, but rather a metal component wearing itself down (although there is still a small possibility that the gearbox may not have been perfectly concentric on the motor, causing excessive wear). There really isn’t a lot that I can do to strengthen the motor further beyond replacing the shafts after a few events, though I am unsure exactly how many events this drive setup participated in. A more frustrating matter was in how long it took to fix the issue: Babróg’s motor mounting has always been more for weight and durability over easy access, but removing the wheel, motor, and ESC’s took basically all of the time I had between my second and third fights, and this may not be time I would have had if this failure occurred later on in the bracket, much less having any time left for other repairs. Weight will be the main issue in redesigning this mounting system to be more modular, but this may be necessary to prevent an embarrassing loss in the future. I also have to acknowledge that in the past two events, Babróg has only really faced horizontal spinners, and while it has performed admirably against them, it’s performance is still a pretty glaring unknown given how much verts make up the metagame nowadays. My performances against control bots should be a decent indication that my ground game should be competitive against verts given the design similarities, but once again, more data is needed.
And that concludes this rather long event report! Once again, it has been such an amazing feeling to finally have a win under my belt, and I intend to keep iterating on Babróg to suplex my way through to more victories. It has also been really cool to see many of the design tricks I have been using in this weight class appearing in other builds, such as the increased amount of grab-and-lifters and front-mounted TPU wedgelets, though I can by no means take total credit for these changes. I’m just happy to see control bots finally seem to retake their place in the meta after so many years of near-total spinner dominance, and look forward to more of these designs achieving success. Unfortunately I will not be able to attend BBB Brawl 2024 due to flights being too expensive as a result of a Six Nations match, but I hope to be able to compete at a multi-day event within the next few months, and have an entirely new design planned for later this year, using a design I’ve never tried before. Special thanks once again to all of the crew who made BITB possible, including the organisers, marshalls, and commentators. Also special shout outs to Ray and 3 Robots for their remarkable runs, Percussive Maintenance XL for continuing to develop beetleweight axes way past what a lot of us believed to be possible, and Sabretooth for designing a melty-brain twin horizontal and (mostly) getting it functional!
Babróg finally victorious at a beetleweight event!