I decided recently to try and make a powerful flipper in beetleweights. Before going into how I plan on doing this and asking for suggestions, a little background: As of writing this I have 3 bots, 2 ants (Liftoff and Cripple) and 1 beetle (CDG) (I am happy to write build logs/ event recaps on these if there are interest). This would make this my 2nd completely new beetle build depending on how long it takes me to pull the trigger on building this.
Idea:
Due to how complex pneumatics at this small of a scale are I don’t want to even try that yet. That then raises the question of how to get enough power to launch an opponent high into the air (I’m aiming for at least half the height of dave’s bw arena).
The options I saw were as follows:
Spring flipper, flywheel flipper and Electric flipper
Spring flippers such as Sproing it seems that alot of space and weight is needed for the spring and the mechanism to wind it back and it seems difficult to scale the flipper power up to as high as I want to go.
Flywheel flippers seems rather complicated and I’m not confident I can make a reliable one in beetleweight.
Electric flippers (e.g. Tosser, Ares and EMP) seem to be more simple in how they work but at least in the cases of Ares and EMP seems to need big heavy gearboxes to be able to gear down and transfer the power to the flipper. Tosser also appears to be the only one to get close to the power I am aiming for when using both its flippers together.
Decision:
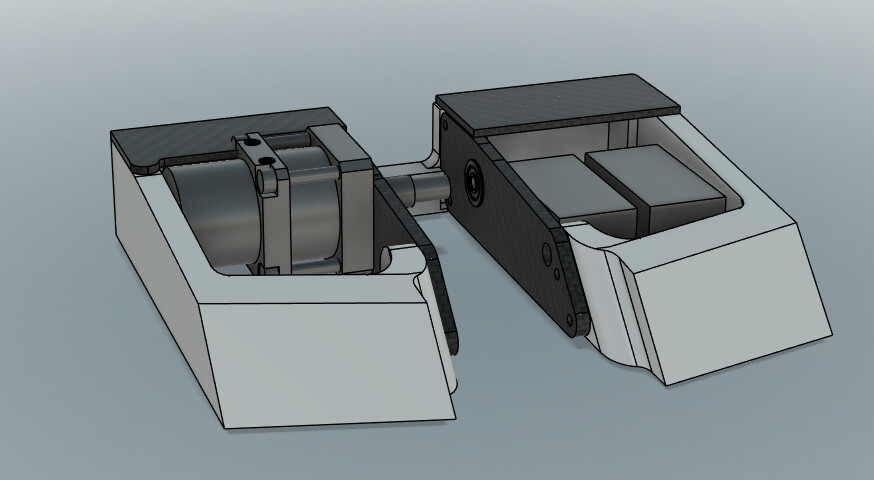
I have chosen to go for an electric flipper as it seems simpler and also easier to scale the flipper power (higher voltage, higher current electronics etc). Below is the cad so far and the reasons for different features.
1 Like
The cad is obviously not finished but the main points so far:
-
TPU body with CF top, bottom and inner frame rails (light weight and have seen it work well for others)
-
4 bar flipper: This is for 2 primary reasons.
- they are good at launching bots high like rear hinge flippers
- when looking at the Run Amok 4 bar calculator I noticed that the torque on the rear crank is very low when the angle of it becomes almost flat (I will explain why I think this is desirable later).
- Large gearbox and motor: The gearbox shown is a battenbox from Team SC. This is because for the UK it is cheap, it has a high reduction and is rather short in length which helps in packaging. Torque wise the battenbox does seem to be decently overkill from the simple calcs I did for the torque (wont bore you with those) and is a little heavy for a beetle. However to fix these the only things I can find that are suitable are bane bots p6 gearboxes and I have been told they are expensive to get delivered to the uk.
Electronics:
Weapon motor: For the motor I am currently planning on changing the brushed motor that comes with the battenboxes (TSC Gearbox (Battenbox) – Team SC) for a large-ish outrunner from a drone. The idea behind this is that inrunners are quite heavy and need more gear reduction and motors from planes that are often used in brushless gearmotors are better but still heavier for their power than drone motors. This is because they require good air cooling instead of thermal mass but that shouldn’t be a problem as the motor should be on for less than a second per flip. The motor I have in mind at the moment is this Special Edition V4 32.5-12 Motor(CW) in its highest kv (1050 kv)

This is also where the feature of it being a 4 bar becomes desirable. The advantage of inrunners of this size is that you can find sensored versions for good low end torque (important for a flipper where you are starting from stationary). However to save weight in the esc and motor I dont want to go sensored so the 4 bar needing low torque when fully flat helps the motor get up to speed so where it has better torque.
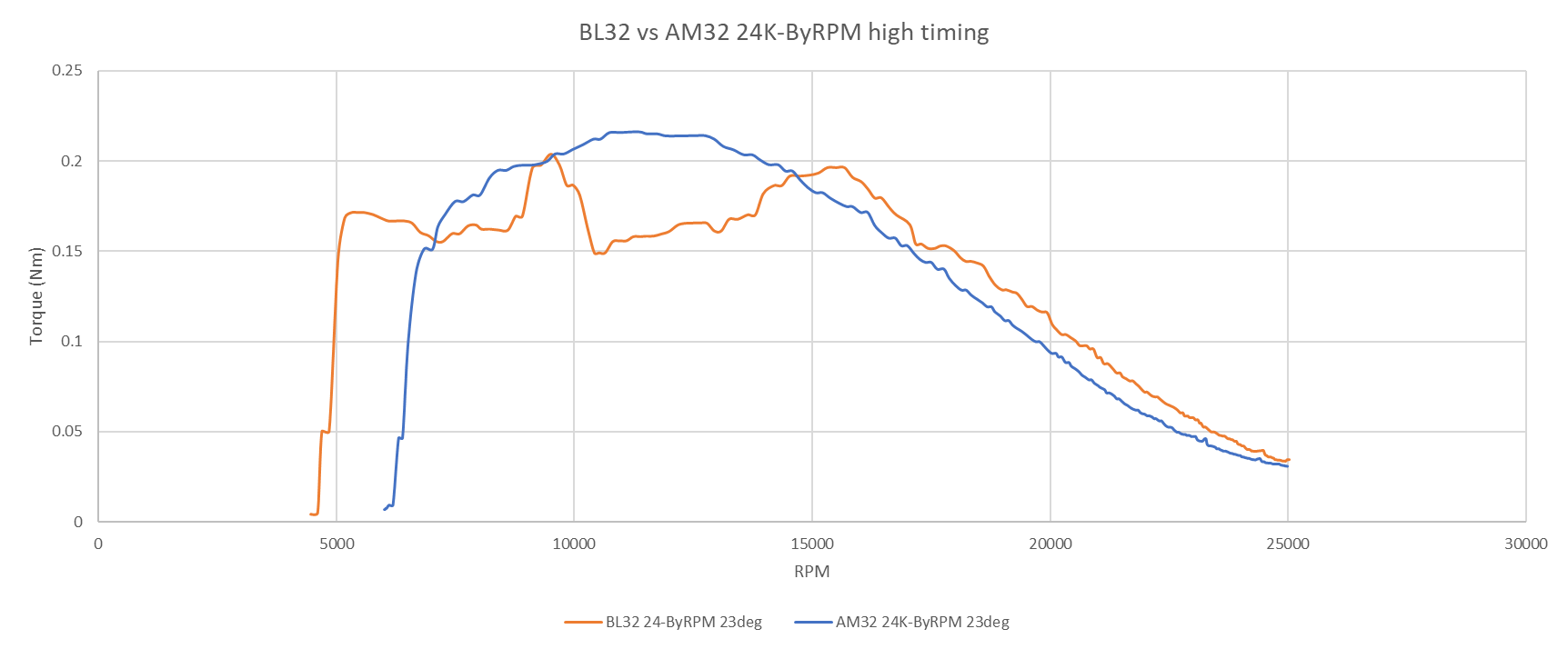
Variable torque at low to moderate RPM · Issue #658 · bitdump/BLHeli · GitHub
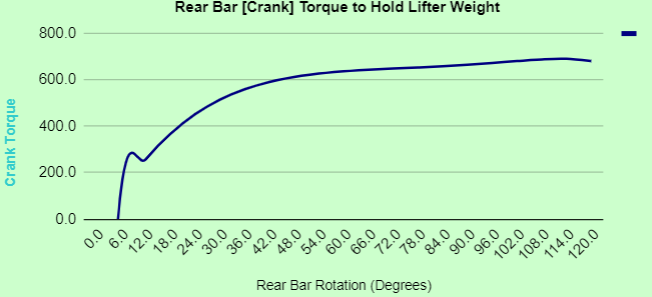
The graph of the torque with rotation is a bit funky with the exact geometry I put in but it gives you the gist.
ESC: The esc doesn’t need to have sensored control but needs to have pretty high current (peak) and needs to be reversible. Currently I plan on using a 70A AM32 esc like on my spinner. These can usually go up to 6S but I have noticed that the repeat Neutron RC 70A is rated for 8S (NeutronRC 70A-G071 Beetle Weapon ESC – Repeat Robotics) so if it is cheap enough to deliver from the US then I will try to make the weapon run on 8S for more power. If I can find a suitable esc that is 6S but higher current that would also be fine.
Batteries: 6S could be done normally using 2 3S batteries or 1 6S one. Otherwise if I did 8S I would use 2 batteries and running the drive off of 1 4S battery and the weapon off of both. This would require larger batteries as I am aware that discharging 2 batteries in series at different rates can cause problems if one discharges too much.
I am sorry if that was very wordy. I would appreciate any feedback or ideas that anyone has and I hope that this process may also help others in trying to make electric flippers in the future.
This is all super interesting, I love electric flippers and I think this is a good approach. AM32 is much much better for low end brushless torque than prior firmwares, so that should help a good deal.
The only issue I can see at the moment is getting the motor output into the gearbox. I’ve used brotherhobby motors in spinners in the past, and they aren’t easy to link up to a gearbox - you won’t be able to have the shaft coming out the base of the motor easily due to the way the shaft and bell are manufactured, which I find pretty essential to pairing brushless motors up to gearboxes. Something like the ‘fixed wing’ config, where the shaft comes out of the stator side, is ideal: T-Motor AS2814 2000KV Fixed Wing Motor | HobbyRC UK. If you’ve already got a solution for this do disregard me!
1 Like
You are correct this may be a problem but for now at least I have an idea. The idea currently is that on the bottom of the shaft is a screw that retains the shaft, this could be replaced with a shoulder bolt or something similar that is turned to fit into the hole for the pinion.
I am unsure of its size currently but from looks I dont think it can be smaller than M3 so as long as the thread in the shaft isn’t equivalent to a rather low grade steel thread then the torque required with the large reduction will be less than the max tightening torque of the screw so there shouldn’t be a problem as long as the direction tightens the screw during a flip.
That is all in theory so if I try that and it doesn’t work then backup will likely be to get a custom shaft lathed down.