I was an idiot and accidently deleted the original post
Having seen a few robots utilise brushless motors and high reduction gearboxes to power flippers in the beetle class to great effect, I decided to have a go at making one of my own. With brushless flipper builders being very vocal of the challenges they’ve faced, my main goal of this robot was to ensure necessary precautions would be taken to ensure the weapon system would be protected as much as reasonably possible.
Other goals for the robot were as follows
-
Utilise more PE500 in the chassis, as it is easier for me to machine whilst maintaining strength
-
Drive motors will not direct drive the wheels and instead will drive each of them by pulleys to better protect them
-
Maintain compactness present on previous robots
-
Ensure ease of maintenance and repair
Here is what I’ve managed to come up with.


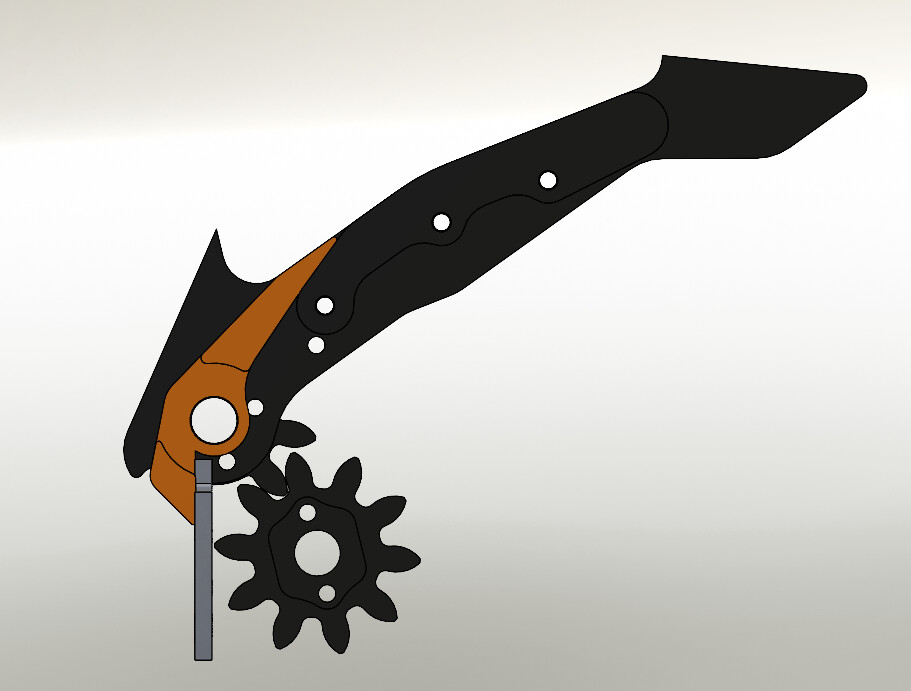
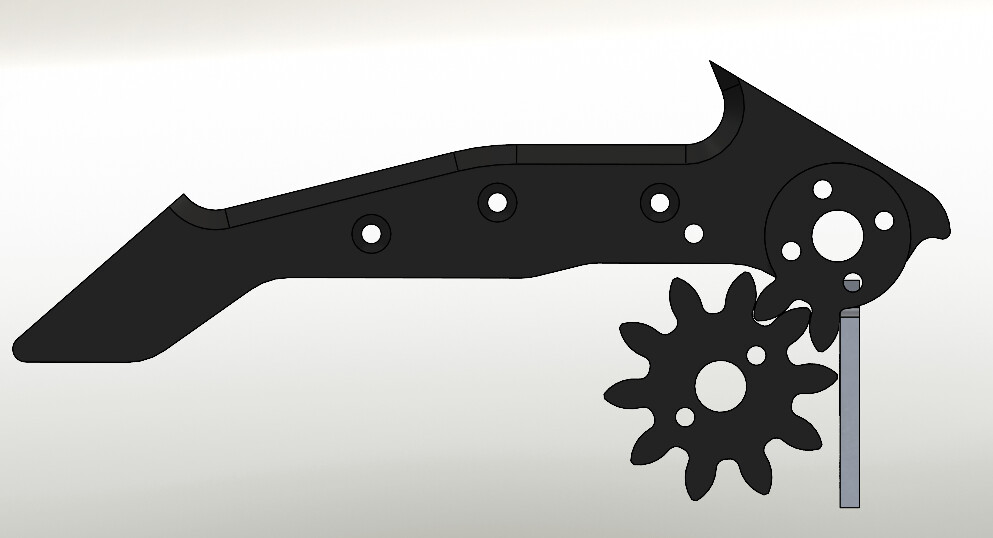
I ultimately went with a Blip style fipper without all the complicated flywheel clutch mechanism stuff which has been substituted with just a basic gearing system.
Chassis
I went with a combination of PE500 and 6082 for this build to make the manufacturing process easier for me and to leave weight for other parts of the robot. The aluminum section of the bulkhead was implemented to take on the brunt of the fork on vert impacts I’m expecting to take as I don’t fully trust PE500 to not deform as I have had that happen on a previous robot.
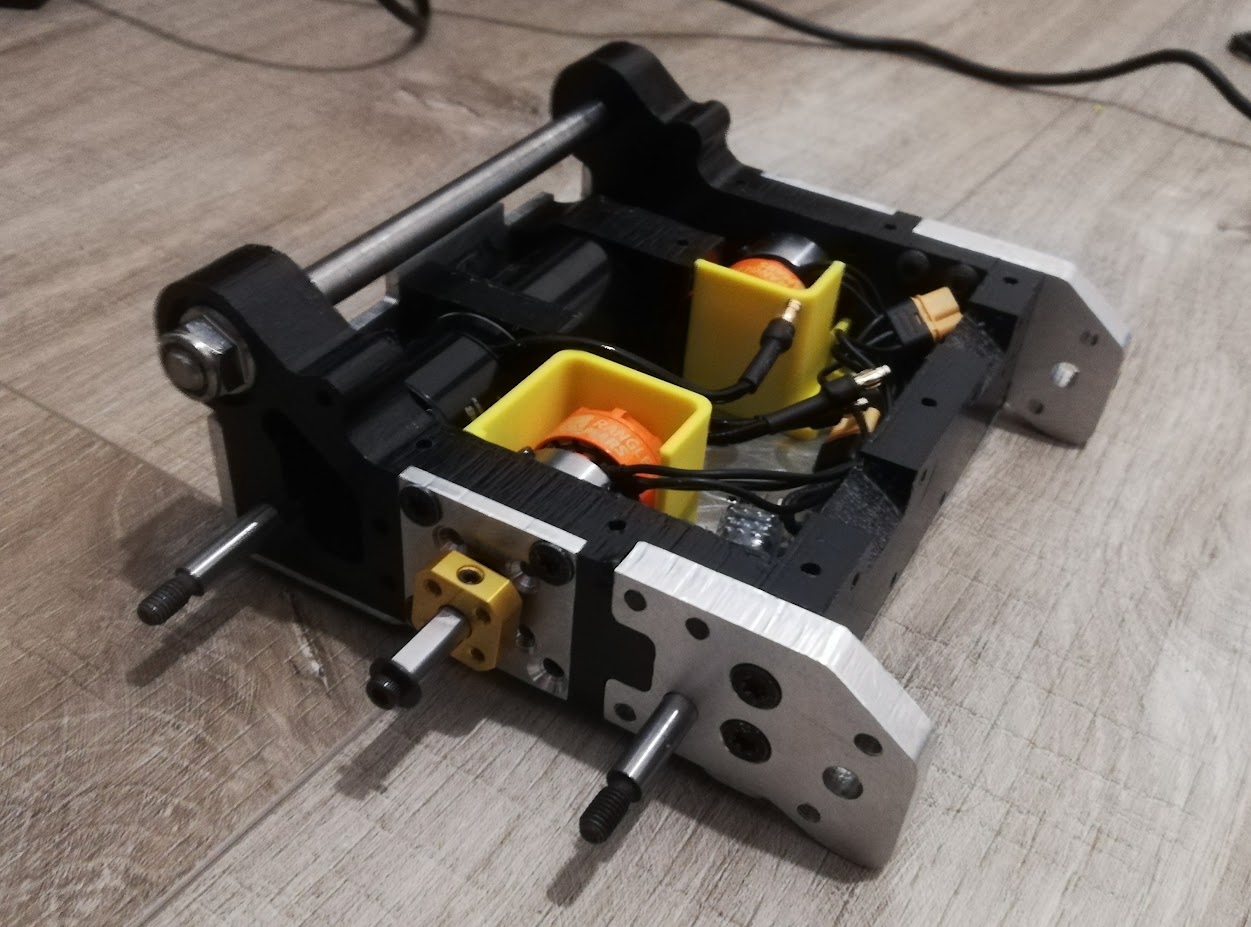
Bulkheads - 15mm PE500, 3mm 6082 Motor Mounts and 8mm 6082
Front Panel - 10mm HDPE
Back Panel - 3mm 6082
Top Panels - 1.5mm 6082 and 2x 10mm PE500 Anti-Hammer saw panels
Bottom Panel - 1.5mm 6082
Motor Mount - 15mm PE500 Motor Mount and 10mm PE500 Brace
Weapon System
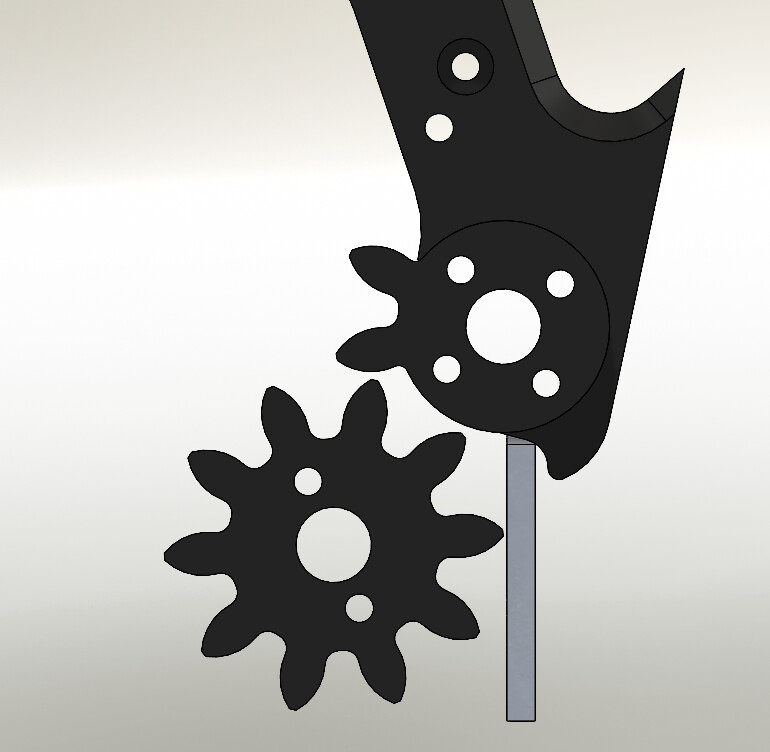
I’ve seen a few examples of clutches being used in beetles to reduce the load on the gearbox. Due to how small the robot is I ultimately decided to go against this and instead went with a more primitive method of just removing a load of teeth on the flipper gear so that it and the pinion simply disengage upon full rotation. This essentially removes all meaningfull load on the whole flipper system as the flipper gear now just skips over the pinion when the flipper reaches its limit. The one glaring floor of this is that the robot can get stuck on the flipper if I don’t retract it fast enough, so got to be carefull there. On retraction I have reduced the power supplied to 15% which shouldn’t produce enough load to damage anything as long as the motor isn’t stalled for too long.
Overall, fairly happy with this. The flipper can do some pretty decent flips and has a good combination of height and forward distance which should hopefully be good for ootas. The danger of getting stuck will be something I will look into for the future. I was intending to look into a bungie style return but I can’t be bothered for now.


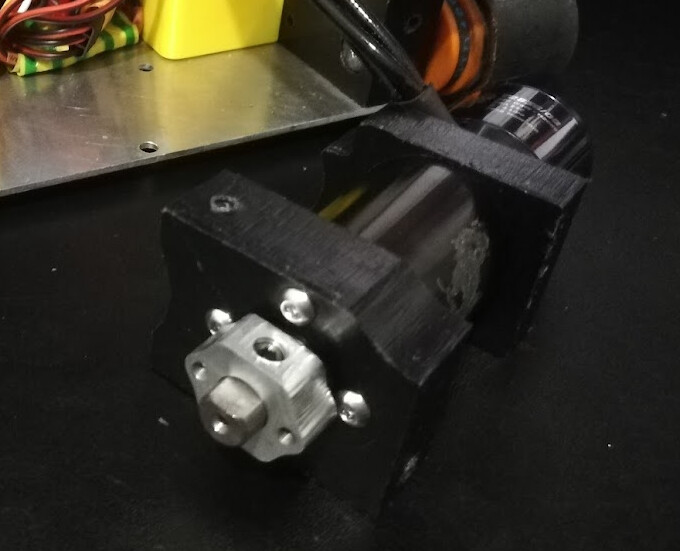
Motor - 2836 Overlander Brushless Motor
Gearbox - 100:1 28mm OD Gearbox (8mm shaft variant)
Pinion Hub - Custom 8mm 6082 Hub with M5 flat grubscrew
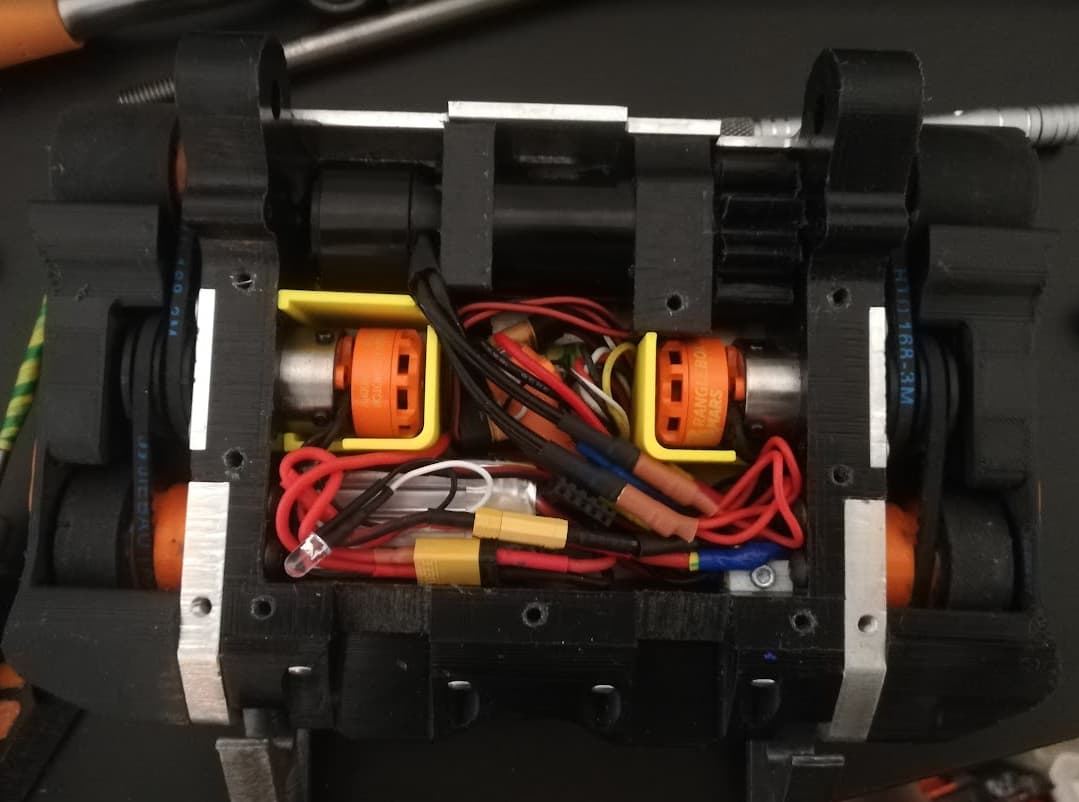
Electronics
Miscilaneous
Forks - 10mm Hardox 500
Wheels - TPU with shore 60a tyres
Sidepanels and Front Fork Panel -TPU
Anti HS Wedge - THICK TPU (still to be made)
In conclusion, I’m pretty satisfied with the robot build, it drives well and seems to have a decent weapon if testing is anything to go by. I’ve got no expectations for Champs as its a completely new build and has not been battle tested, however as long as I get a couple decent flips in I’ll be happy.