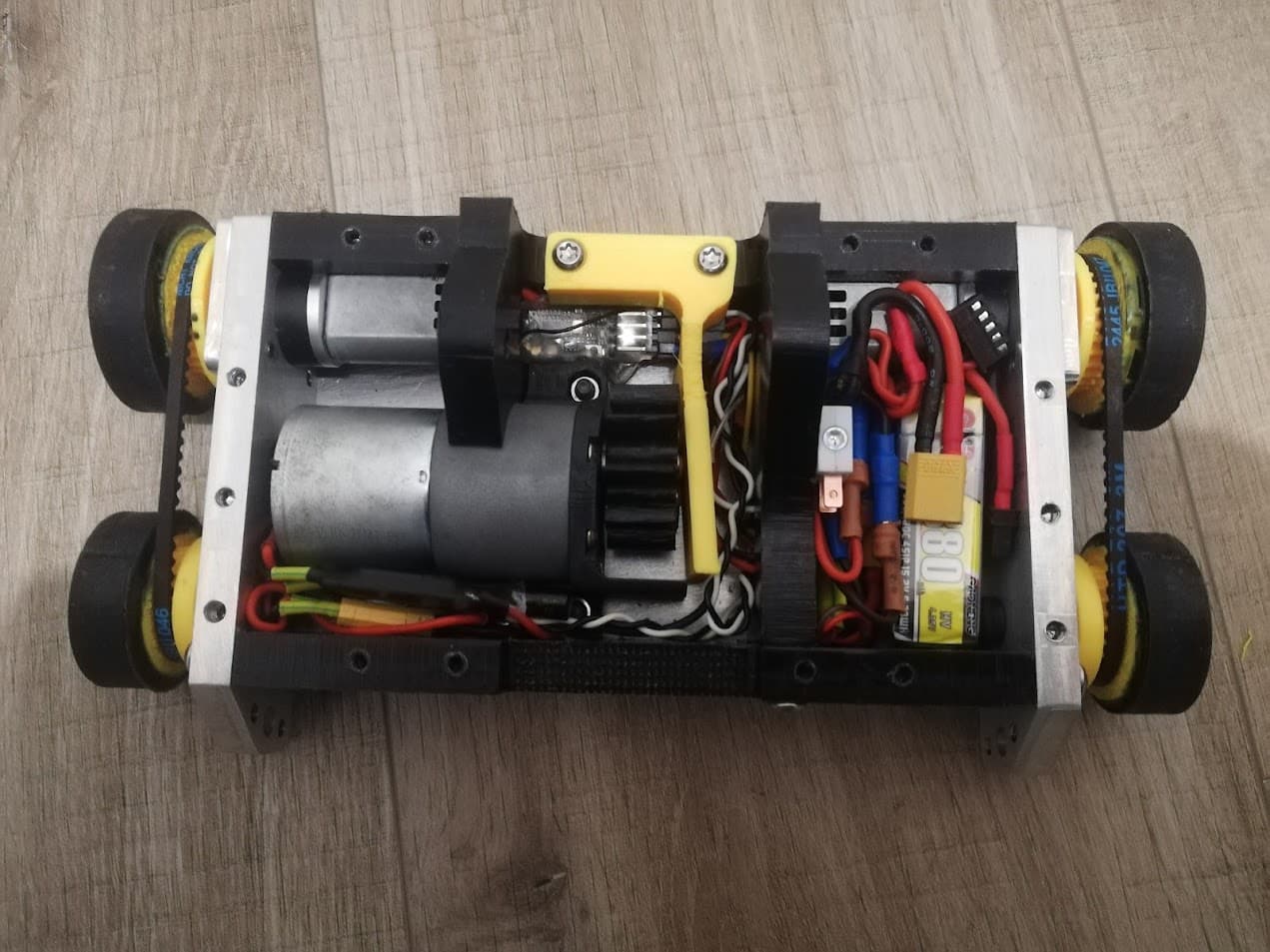
After fully updating my main robot to brushless drive I was left with quite a few Brushed Mars 180 and BBB 22mm gearboxes lying around, as well as a bunch of brushed ESC’s. Feeling guilty that these electronics would go to waste otherwise, I decided to design a grab and lift robot akin to robots like Luchador, Toucan and Babrog.



The frame is a mixture of 6082 Al and PE500. I use aluminum on the majority of my robots and from how its held up at previous events, is my material of choice. However due to the size and nature of this machine I was doubtful I was going to be able to make weight if it was all Al. For that reason 10mm PE500 was used for the front and back panels, as well as the central lifter mounts. 8mm 6082 (standard for me) was used for the side bulkheads and 1.5mm for the top and bottom panels. TPU was used for the side panels and front wedges.
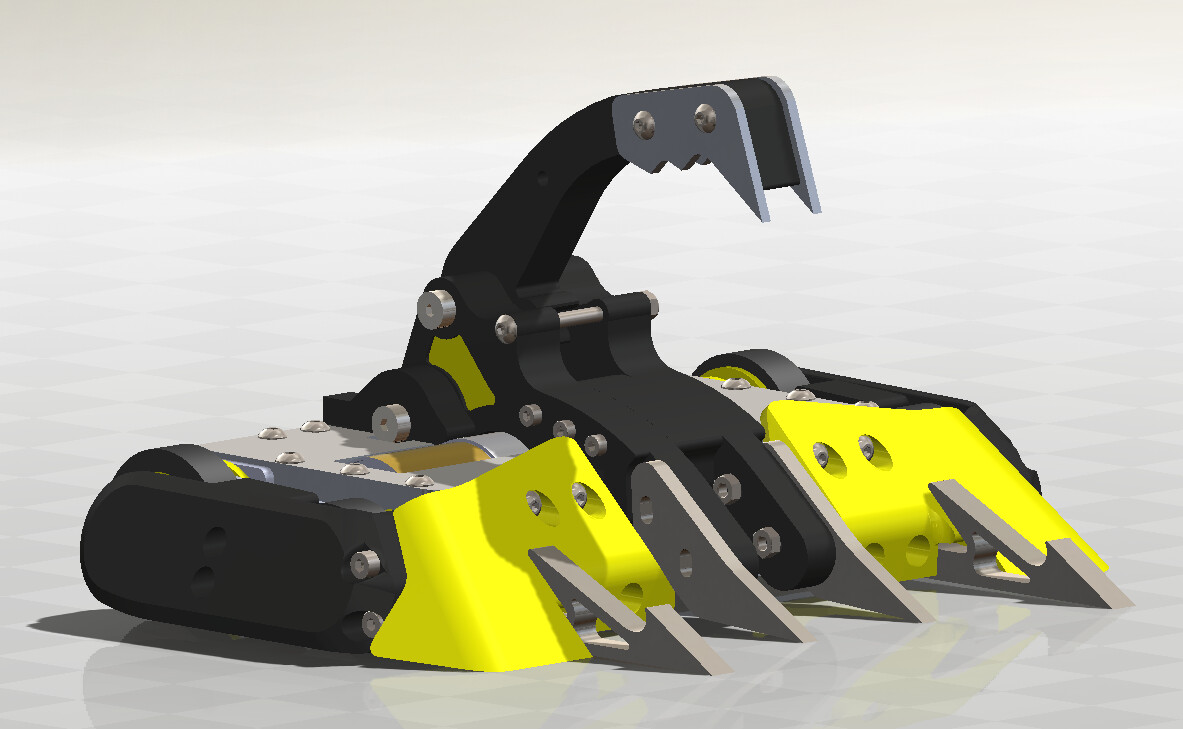
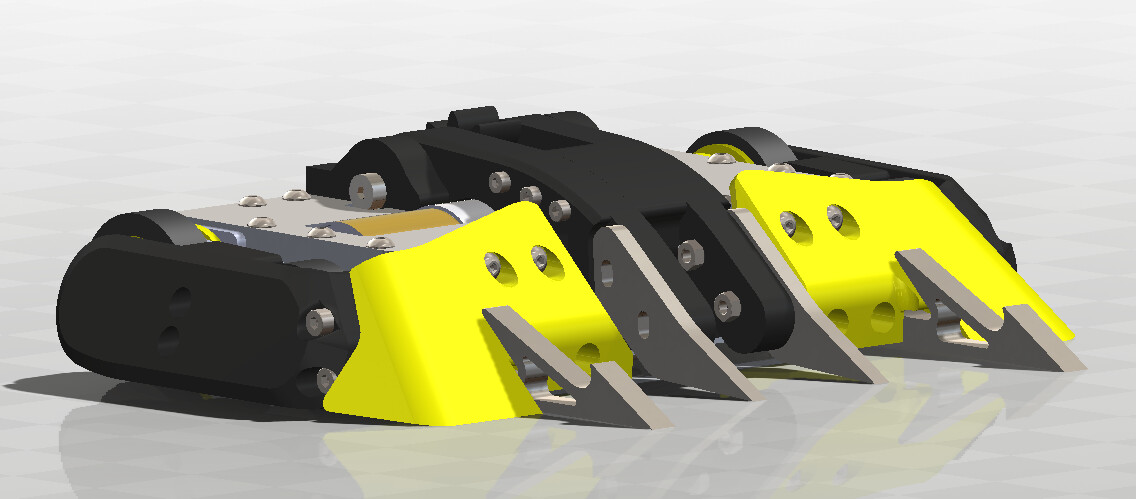
The lifter section of the grab and lift mostly comprises of CNC’d 15mm PE500 with 5mm hardox forks at the end. The claw is also 15mm PE500 with some bolted 6082 teeth at the end (For aesthetics mostly). This mechanism is powered by a 50RPM Pololu 37mm Motor with a 15mm mod 3 spur gear pinion directly attached to the shaft. This meshes directly with a 15mm idler which is mounted on the same axle as the lifting arm which in turn meshes with a the same gear profile machined into the claw arm. This gear set up is all 1:1 and through testing seems to be fairly promising.
I’ve still got a few things to work on for this build such as adding a locking bar mechanism, a switch, and a couple more configs to manufacture.
I was initially planning on entering it for the pub rules event but since there is an earlier event for new robots I might try my luck at entering that.