I’ve finally decided to write an entry for one of my builds, and where else to start than the bot I’m best known for; quite possibly the largest beetleweight in existence, Cormoran.
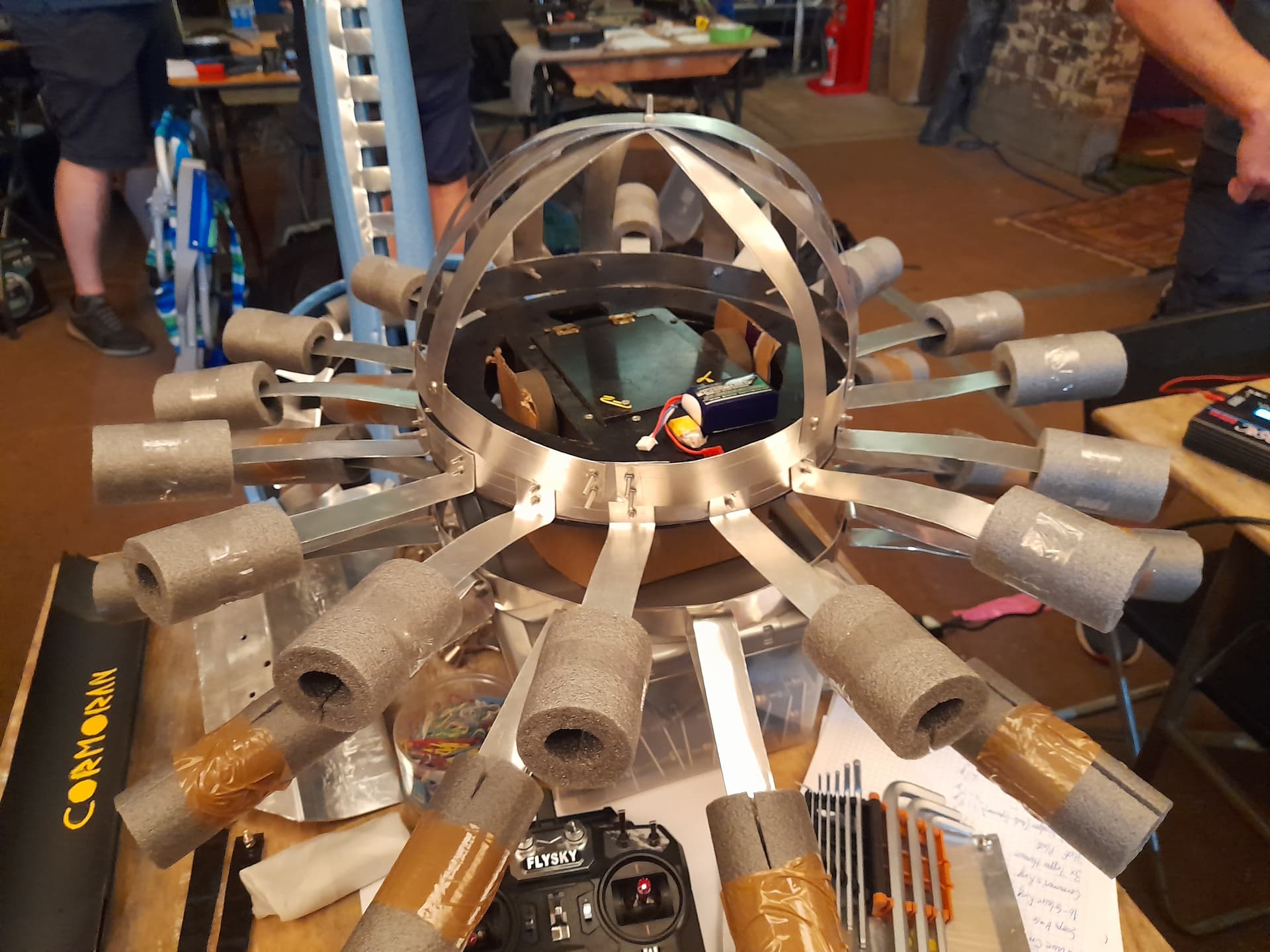
Cormoran is an invertible disc-shaped bot; a small box chassis is nestled between the circular base and top plates. The top and base plates have been littered with latching points for a multitude of different attachments and weaponry; spikes, forks, flails, scoops, wedges, and protective coverings, to name just a few. The top and base plates are already 320mm in diameter (larger than the footprint of most beetles), but Cormoran takes this one step further when fitted with some of the ‘ring-fitted’ fork attachments, reaching over 800mm in diameter. One scoop attachment is 1500mm wide (within weight, but unlikely to be used in combat).

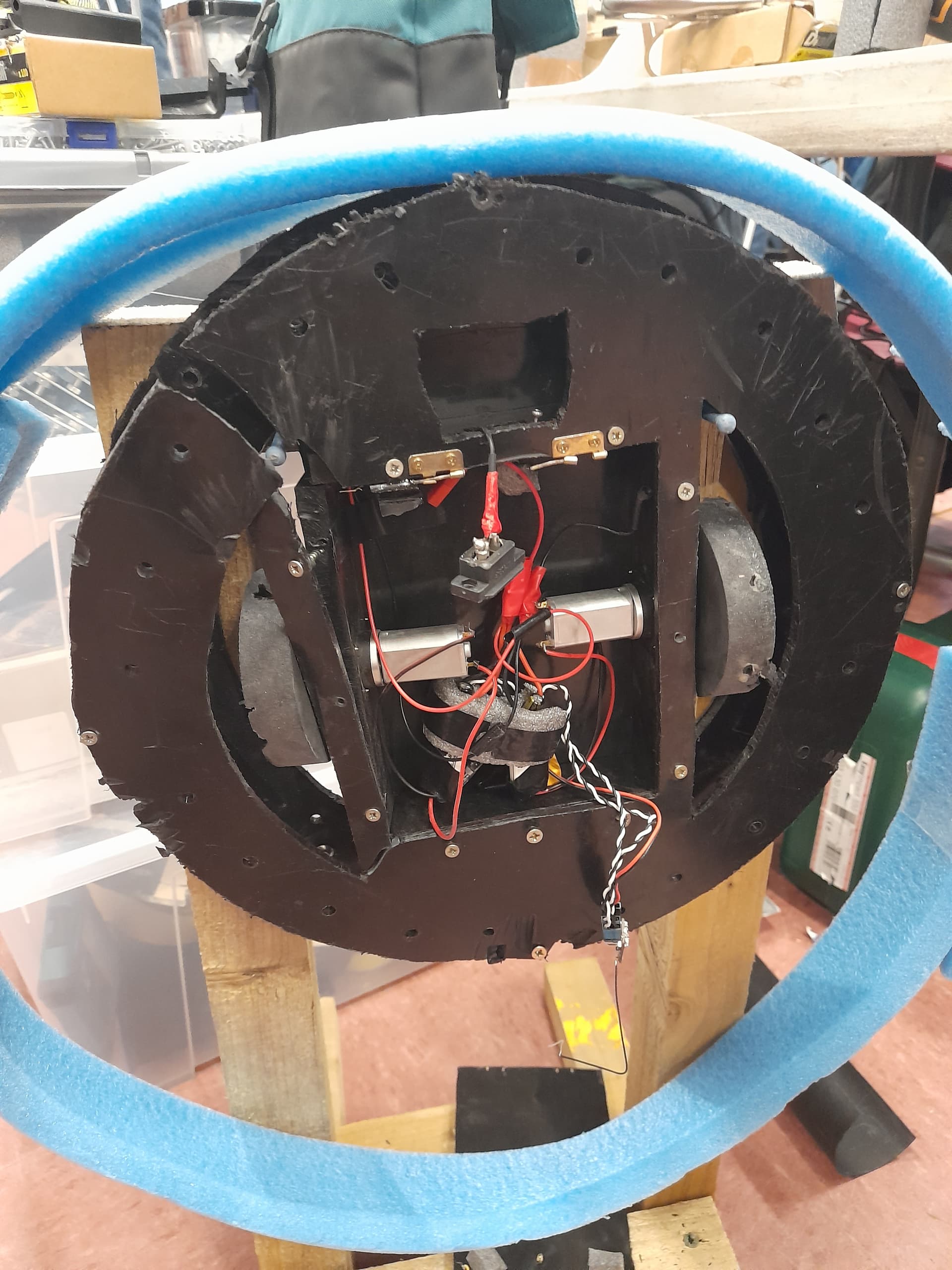
I didn’t initially intend to build a massive bot, it just… worked out that way. The initial idea was to build a hammer bot with a truncated cone chassis. The drive kit used was that of the ‘BBB Beetleweight Drive Kit’, making use of four ‘BBB Beetleweight Planetary 22mm Gearmotors’. Once the measurements were made for the (pre-purchased) hammer motor to sit centrally in the bot, and the four drive motors set evenly within as tight a space as I could fabricate, it became clear that the cone would be over 360mm in diameter, and over 180mm tall! Too big, I thought, and too heavy, in practice.
Another event was coming up (Beetle Brawl, February 2022), and I needed to produce a functioning bot for me to have a chance at competing; I turned my attention to adapting the circular 4WD setup that I had mapped out into another of my and my brother’s childhood designs. The design I settled on (as it had no moving weapons, and would be easy to build) was an invertible 4WD sit-and-spin, though the original design’s bright pink colour was dropped for black (I had already bought the HDPE). The core of the bot (the chassis, electrical components, and the top/base plates) weighed roughly 1200g, leaving another 300g for weaponry and aesthetics. The plan to fit interchangeable weapons to the shell was to allow for an adaptive fighting style for each fight (and to have spares), so some spikes, a scoop, and a jagged ‘crown’ were made. Realising that the potency of static weaponry no longer goes as far in robot combat, I needed to make the bot more memorable than effective, and so the (flimsy) 0.5mm aluminium was used to construct a ring of large forks around the entire bot. The only remaining thing to do was to name it; so to keep with the Cornish theming of my bots, naming them after myths and legends, what better being to name this large bot after than the very giant that created St. Michael’s Mount, Cormoran. And with that, the first iteration of this enormous robotic meme was built!

Cormoran’s first event resulted in a resounding loss in all fights, though two went to the judges. The draw of four drive motors on the single 3S Lipo battery was too much, and the movement across the arena floor was too slow for Cormoran to do anything of note in these fights, barely able to turn effectively, let alone spin. In readiness for the next event, two wheels were removed from the design, and the speed was improved considerably; this weight reduction also allowed for heavier (and more potent) attachments to be made; 1.5mm thick aluminium was used for some of these. The second version of Cormoran was now ready to compete.

Since the wheel reduction, nothing of note has changed internally; the drive motors have been swapped out for identical models, and the link has been made more secure. Externally, the chassis and top and base plates were continually used, despite regular damage in each competition; the only parts to change were the attachments themselves, which were designed to be swapped out after each fight anyway. At its peak, Cormoran boasted over 20 different potential setups, including forks, spikes, scoops, flails, anti-horizontal wedges, and the dome.



During ‘Battle in the Burgh 3’ (November 2023), Cormoran was ‘sacrificed’ to a spinner whiteboard, with the intention to immobilise it (it had only ever been counted out due to ‘pitting’, becoming high-centered, or getting caught on the arena wall). As hoped for, during the fight, the bot was ripped open and the battery ejected, officially immobilising Cormoran mid-fight, and plenty of damage was caused in the process! Believe it or not, barely 5 minutes after the fight, once the battery was put back in and the spikes bent back into shape to allow it, Cormoran was still able to run! This sacrifice was truly intended to act as a catalyst to rebuild and update Cormoran to a new version, but I reasoned that it could not be done before the bot had been outright broken in a fight.
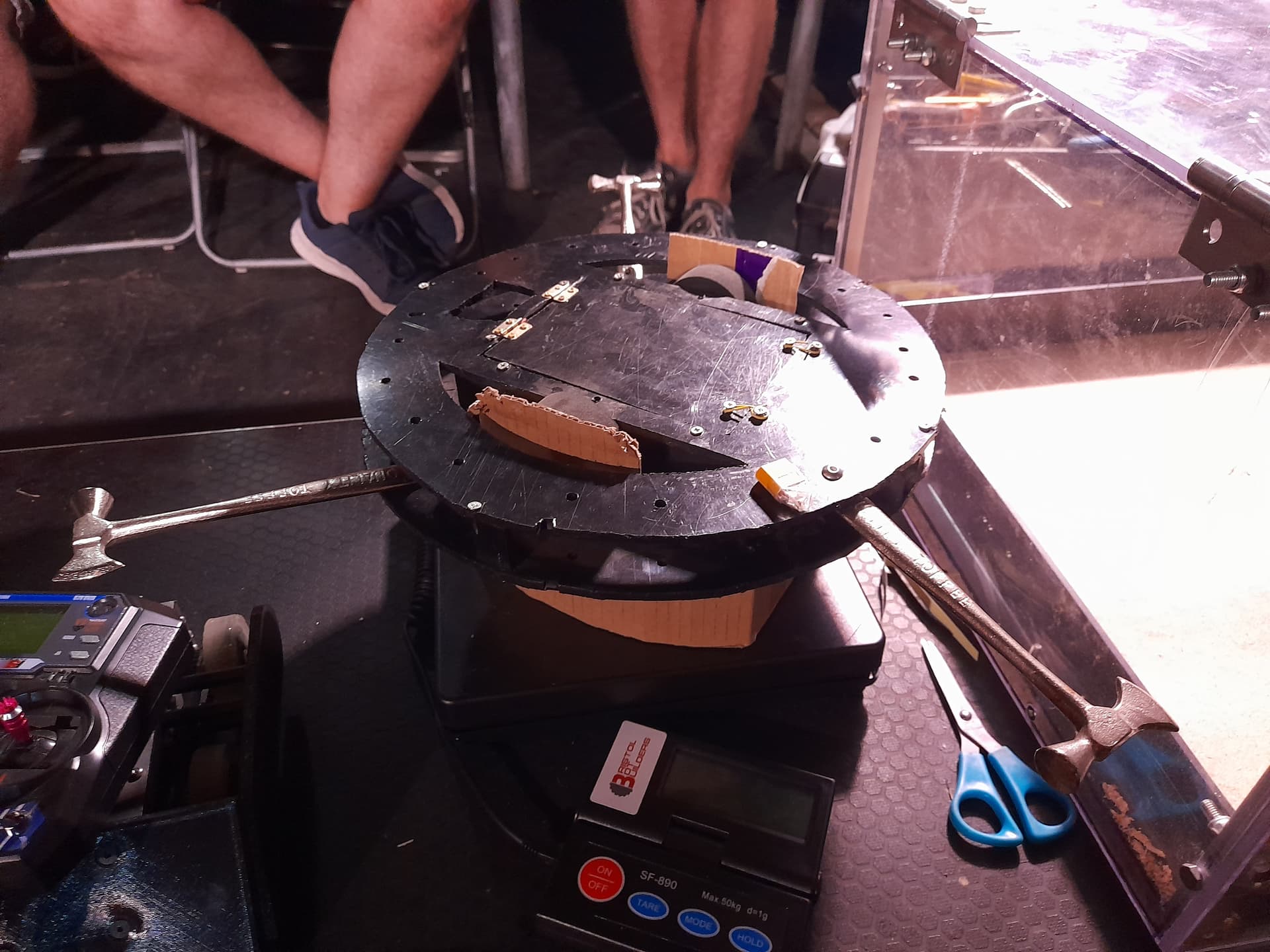
And so to the rebuild, and creating version 3 of Cormoran; as a minimum, the destroyed chassis panels were to be replaced (this time in yellow), and the top/base plates needed spares, and, of course, new attachments needed to be built! As the chassis was not made smaller between versions 1 and 2, there was plenty of scope to reduce its size and create a much smaller ‘core’ for the bot. The newer chassis was designed to accommodate the original top/base plates despite the damage they received, and the opening panel design (that allowed the battery to be ejected) was ditched in favor of a screwed-on panel design.



Designing a smaller core also inspired a new process for swapping attachments in/out; by creating interchangeable top/base plates with attachments pre-fitted, it allows a much shorter turnaround time for fitting a different attachment, very useful when wanting to run a 16-spike setup in a fight after something completely different. With new top/base plates, new attachments were theorised, and then came an idea to design new top/base plates to allow the bot to appear very different between fights, working with entirely different types of weaponry, rather than just different versions of the same static spikes or scoops. So far, only a thwack-bot setup has been completed and tested in battle, sporting an HDPE hammer and 285mm diameter wheels, but designs have been drawn-up for future competitions, to be armed with lifting arms, grabbing claws, overhead hammers and circular saws.

Throughout all of the changes made to Cormoran, and all the damage it has received throughout its existence, two things that have never changed are its unwieldy size (though no attachment has quite matched the original) and the internal electronics, following the blueprint laid out on the BBB website.
At the time of writing (May 2024), Cormoran has a record of 4 wins and 23 losses. Hopefully, if I come to update this post, this record will have improved even further.
