Been a while and with the summer coming and a year of college behind me I’m looking at this robot and cringing extremely hard.
So yesterday instead of studying for exams (energy systems is so boring omds), I gave a makeover to my first rather sad attempt of a robot.
I’m keeping the hardware basically the same bar changing the battery from 300mah to 350mah and a fresh weapon motor as I burnt the other in a separate project from this. However there are a good few fresh aspects and lessons learned to this new version of Cortex.
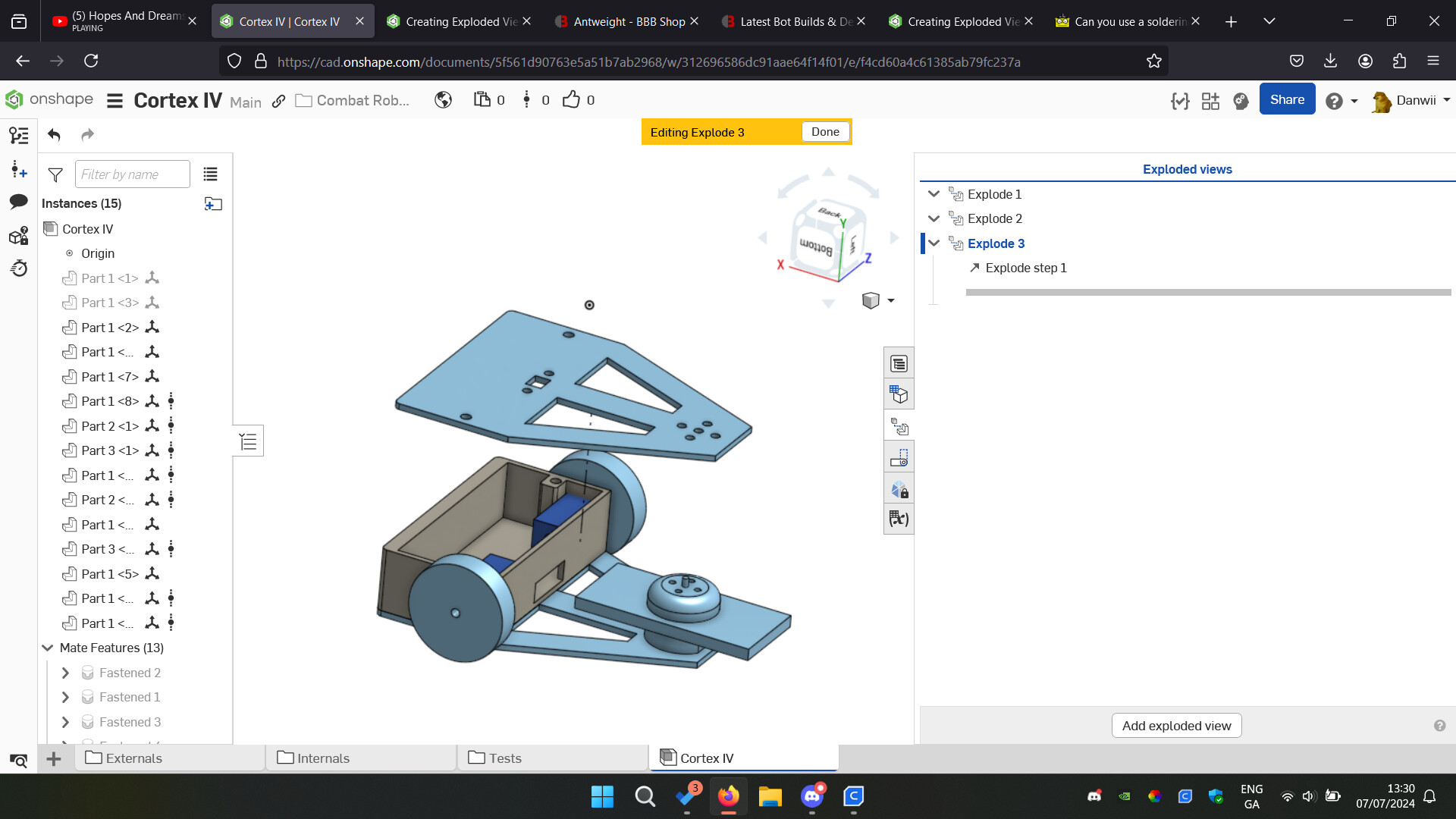
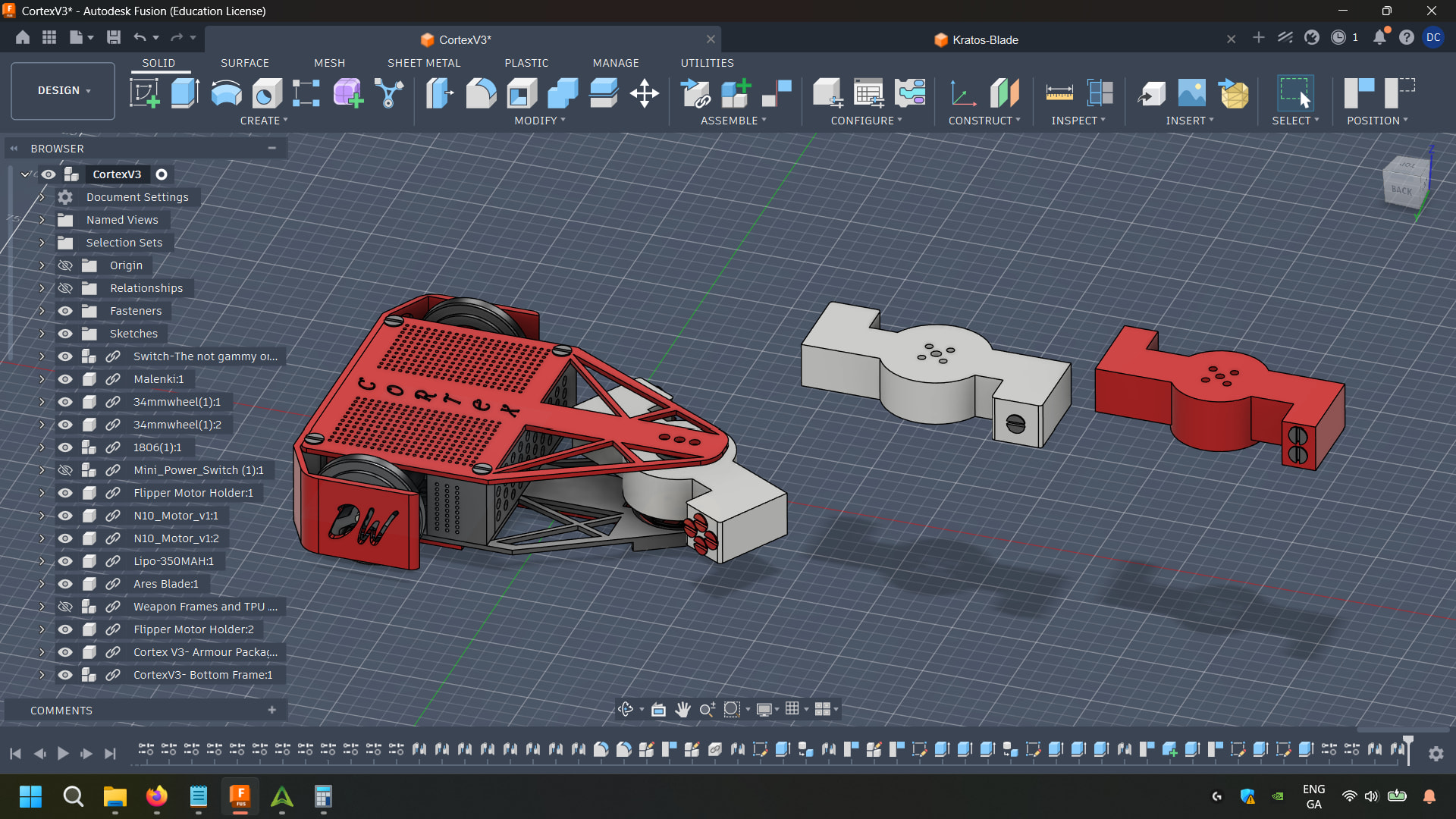
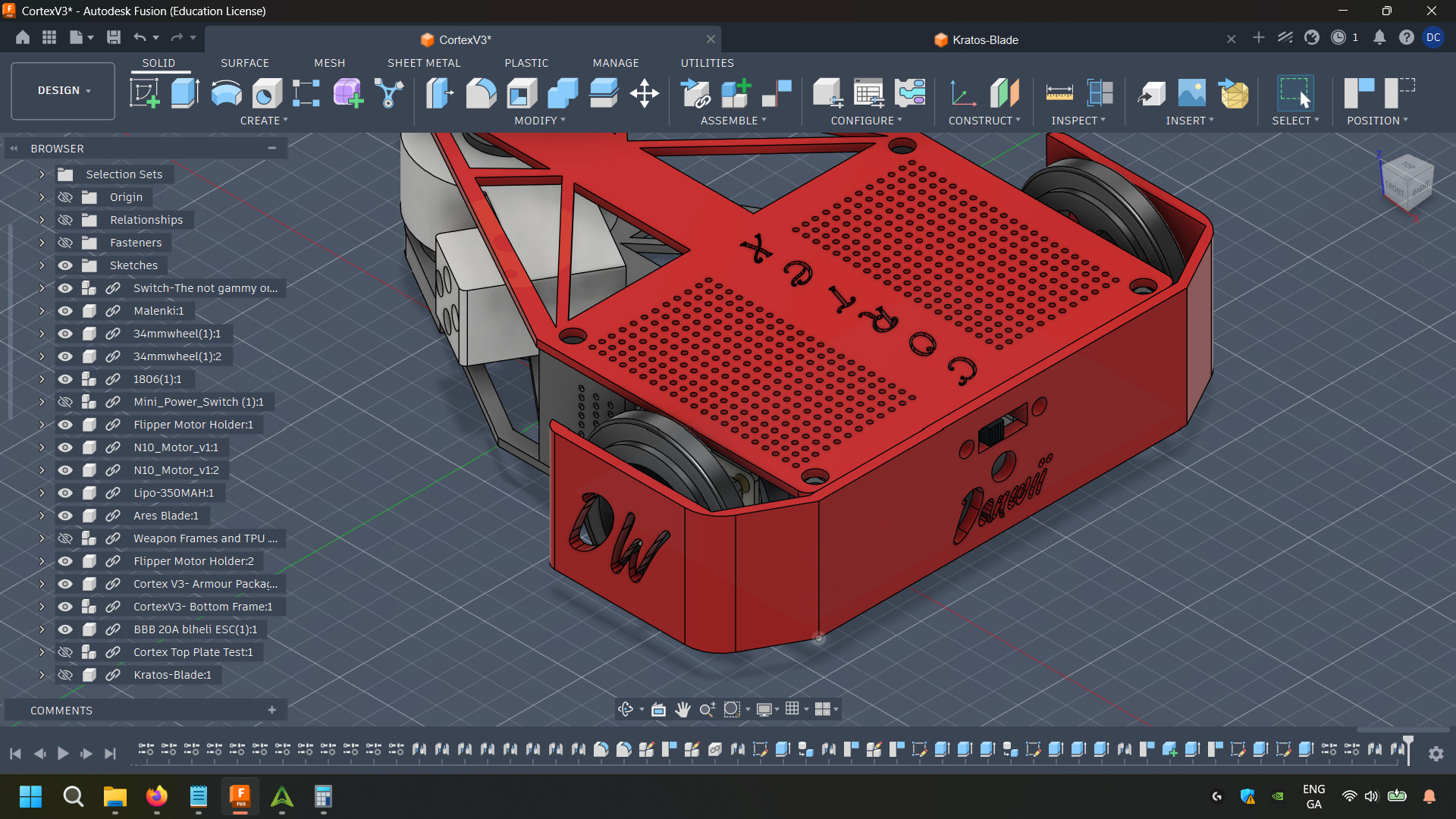
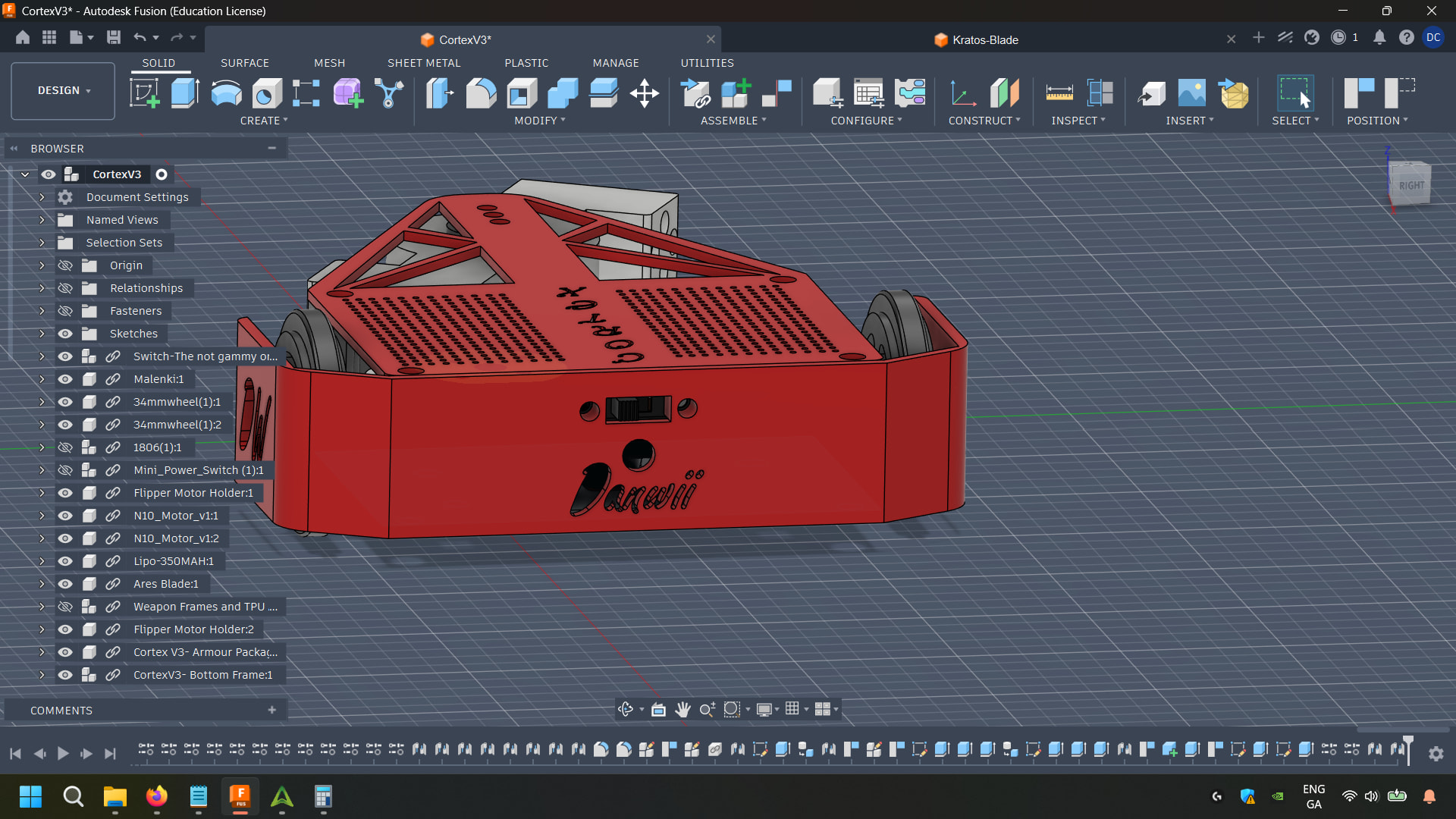
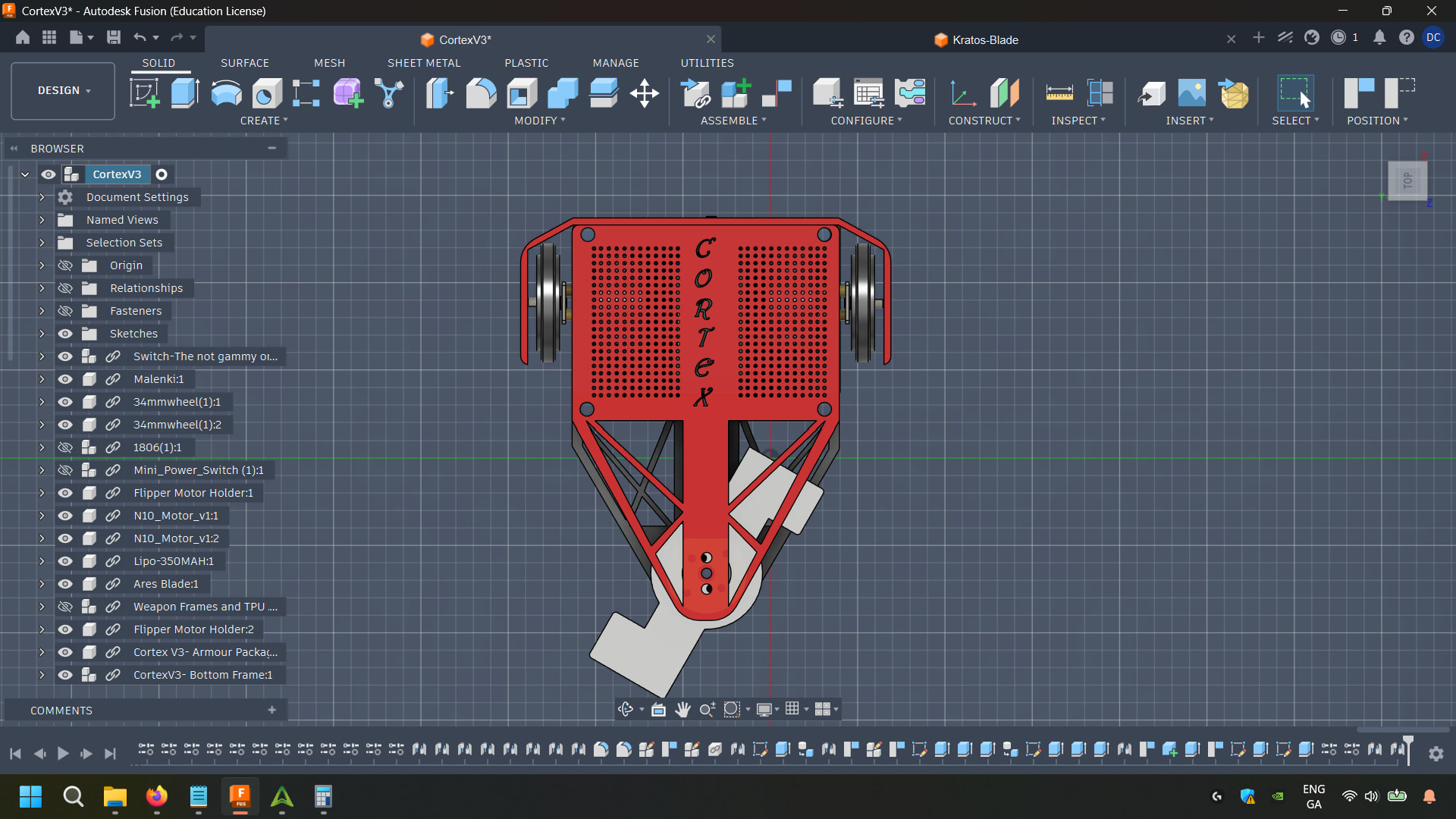
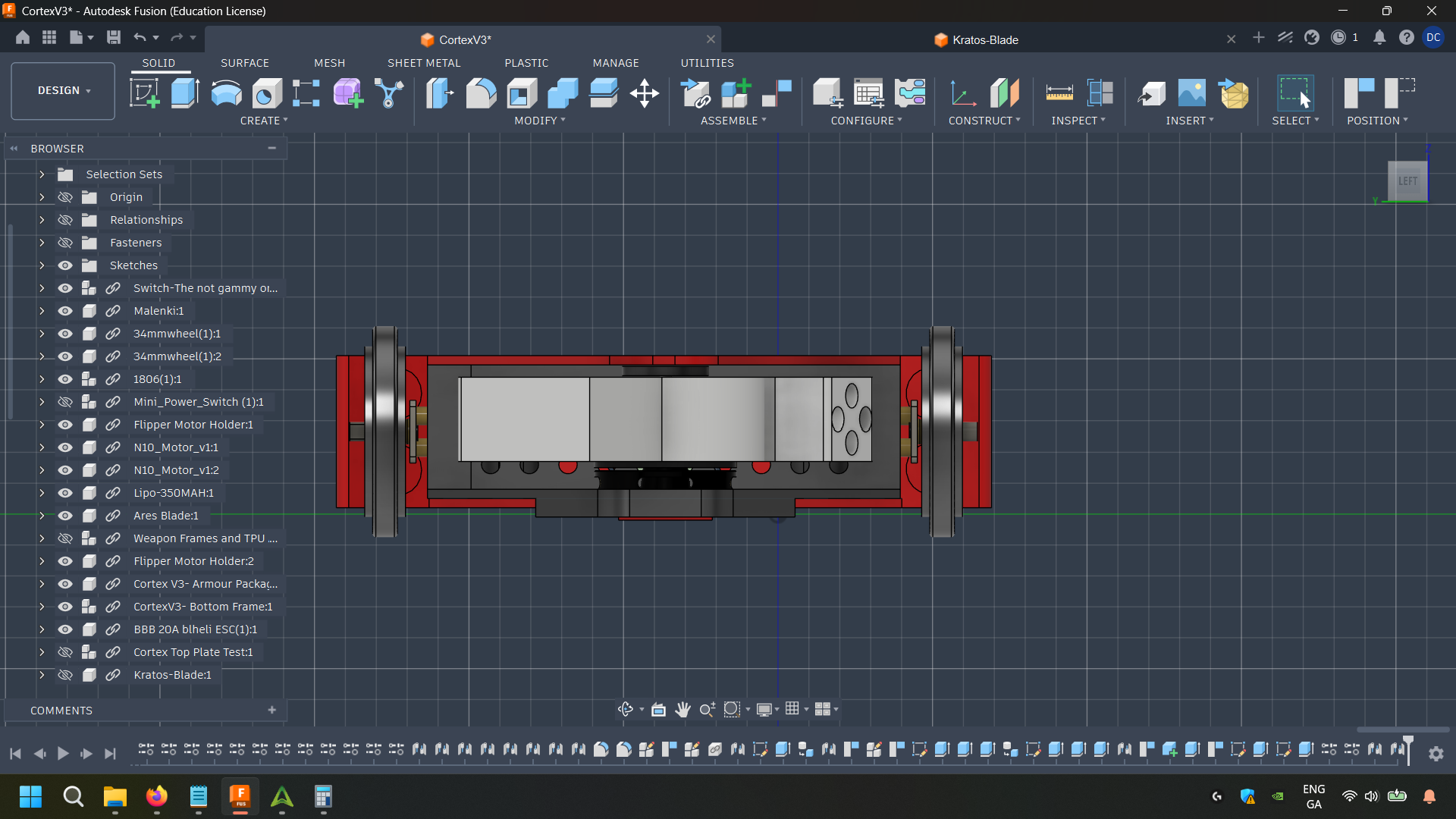
1 Composite Frame: This design features PLA+ and TPU 95A, the TPU being depicted as red and PLA as gray. Both measure 1.5mm in thickness for the most part, the main reason being TPU is god awful at holding brass threads and PLA being god awful against spinners, so why not take the best of both worlds and hopefully cancel out the downsides.
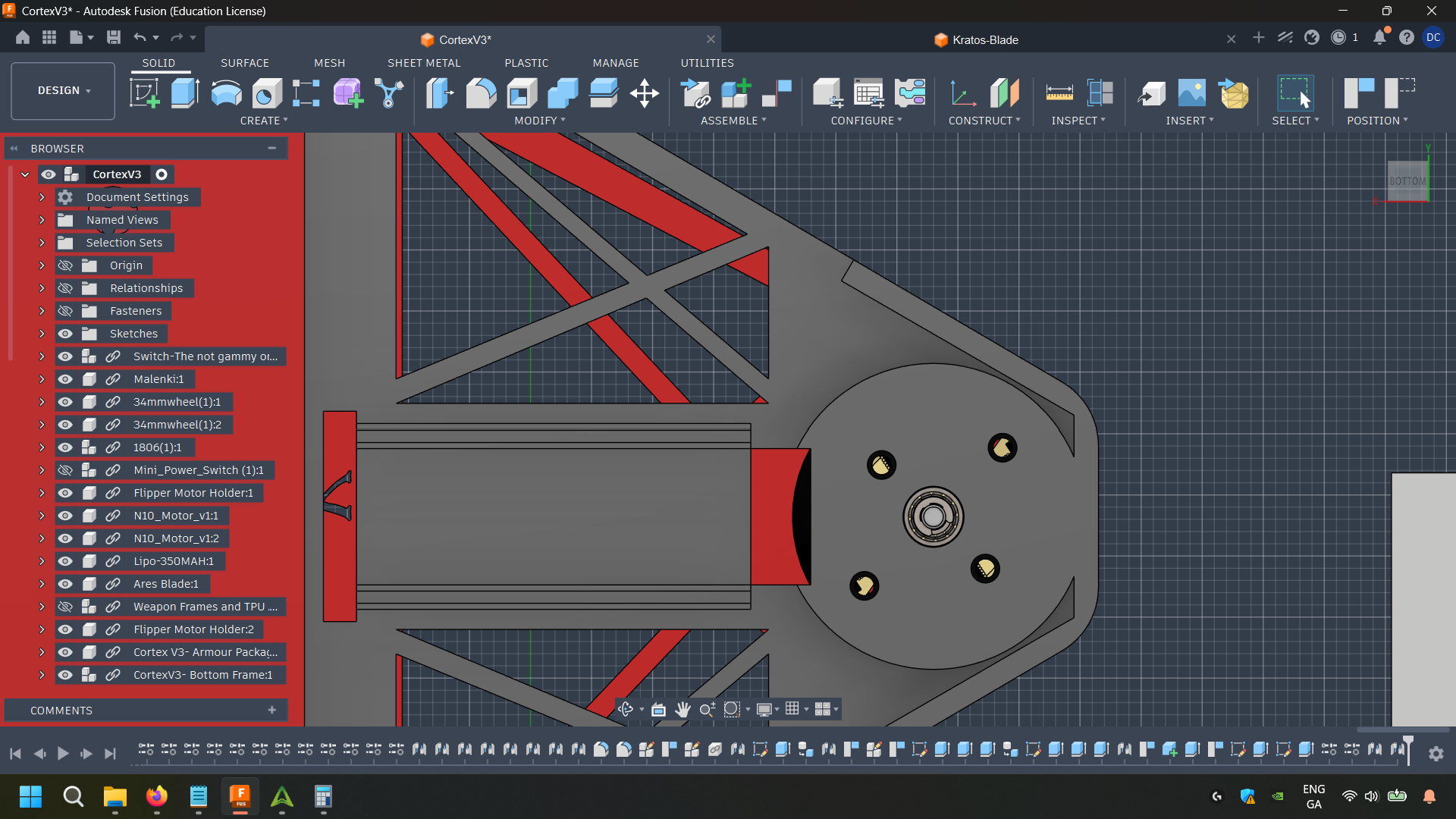
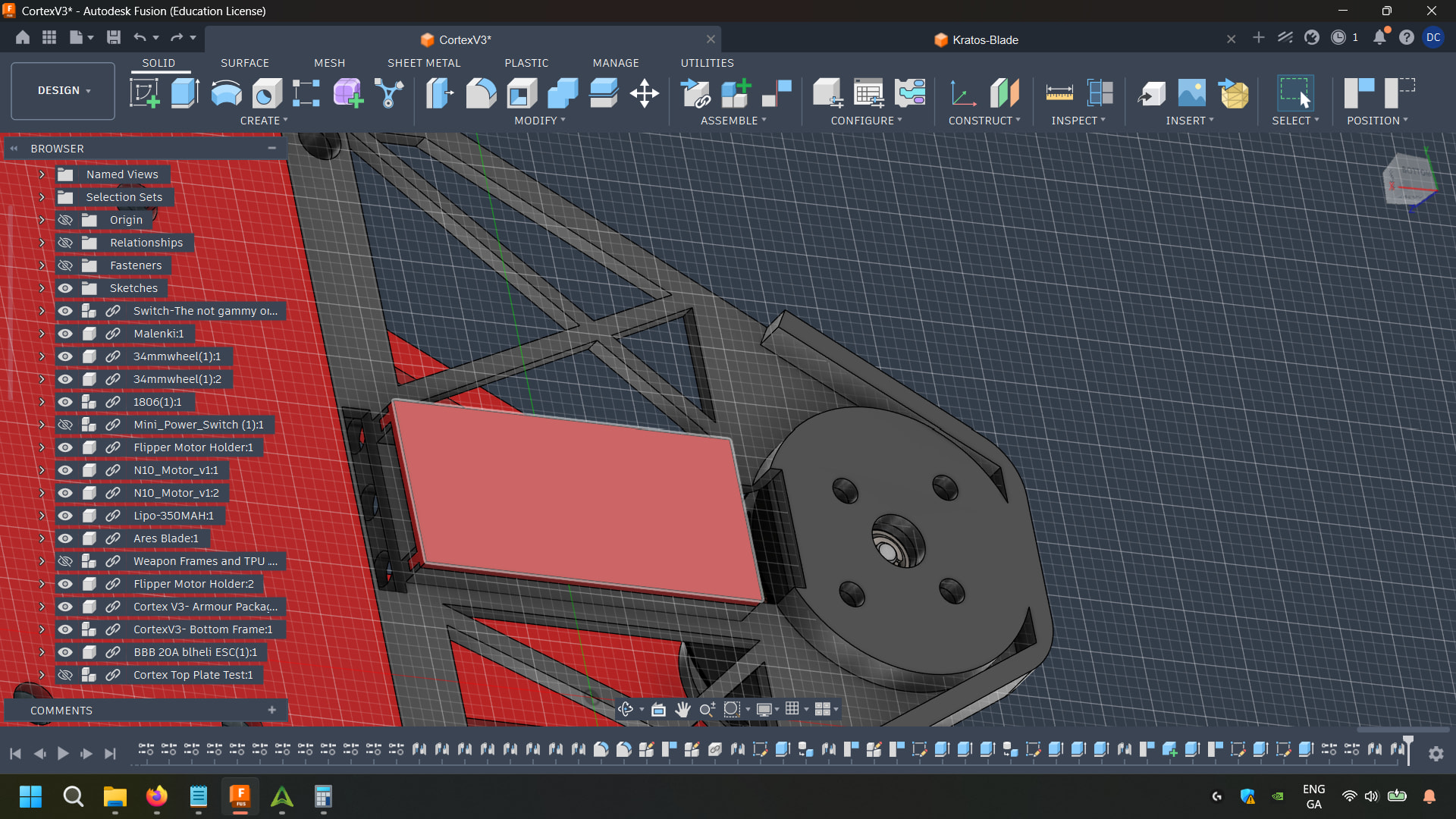
2 Wheel guards: 0% Infill TPU guards the wheels this time since after a good bit of driving with the previous version I noted how I wasn’t exactly as precise as someone like Ray Billings and the gyro got the better of the me. This TPU module also guards most of the underside:
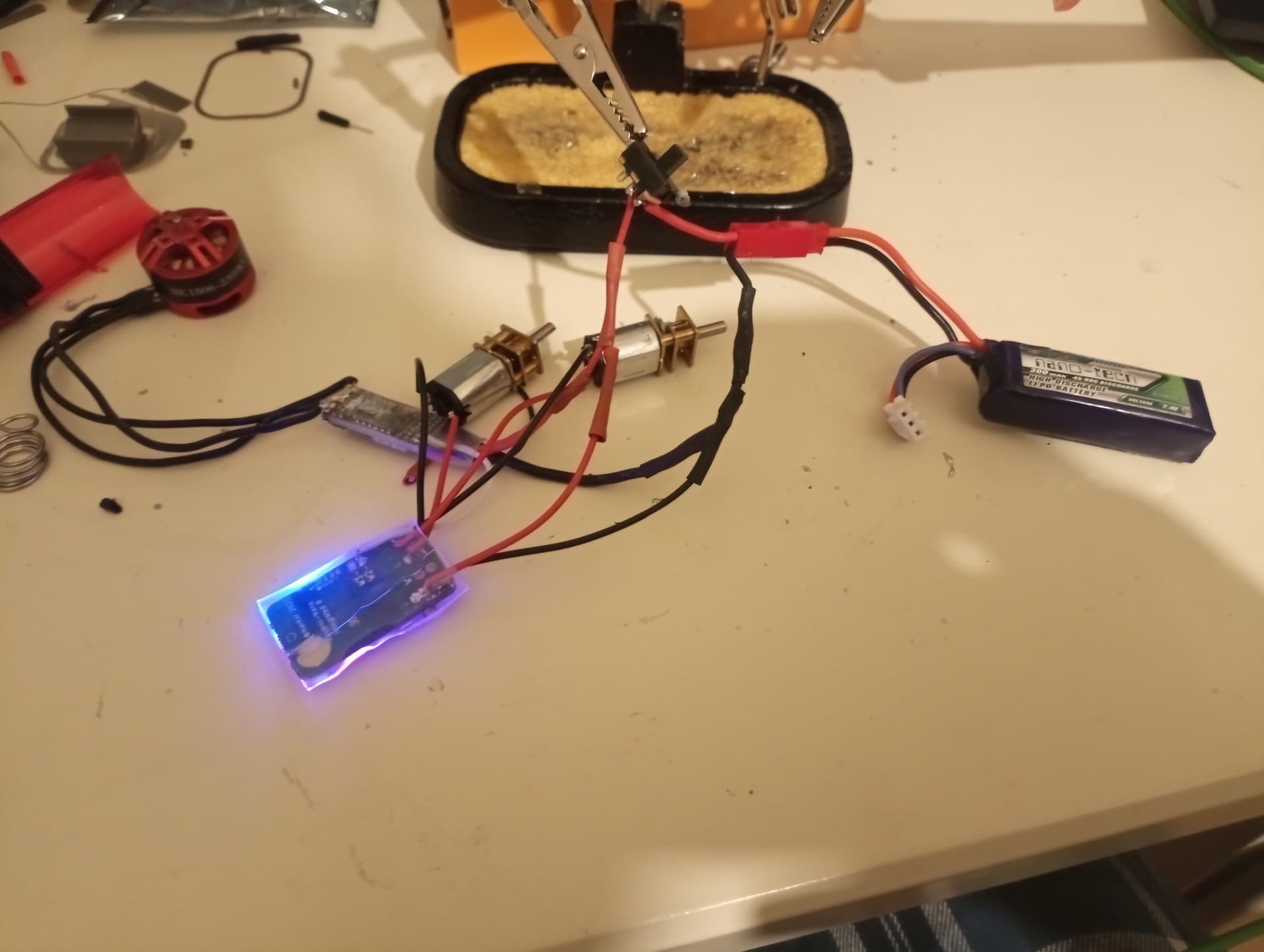
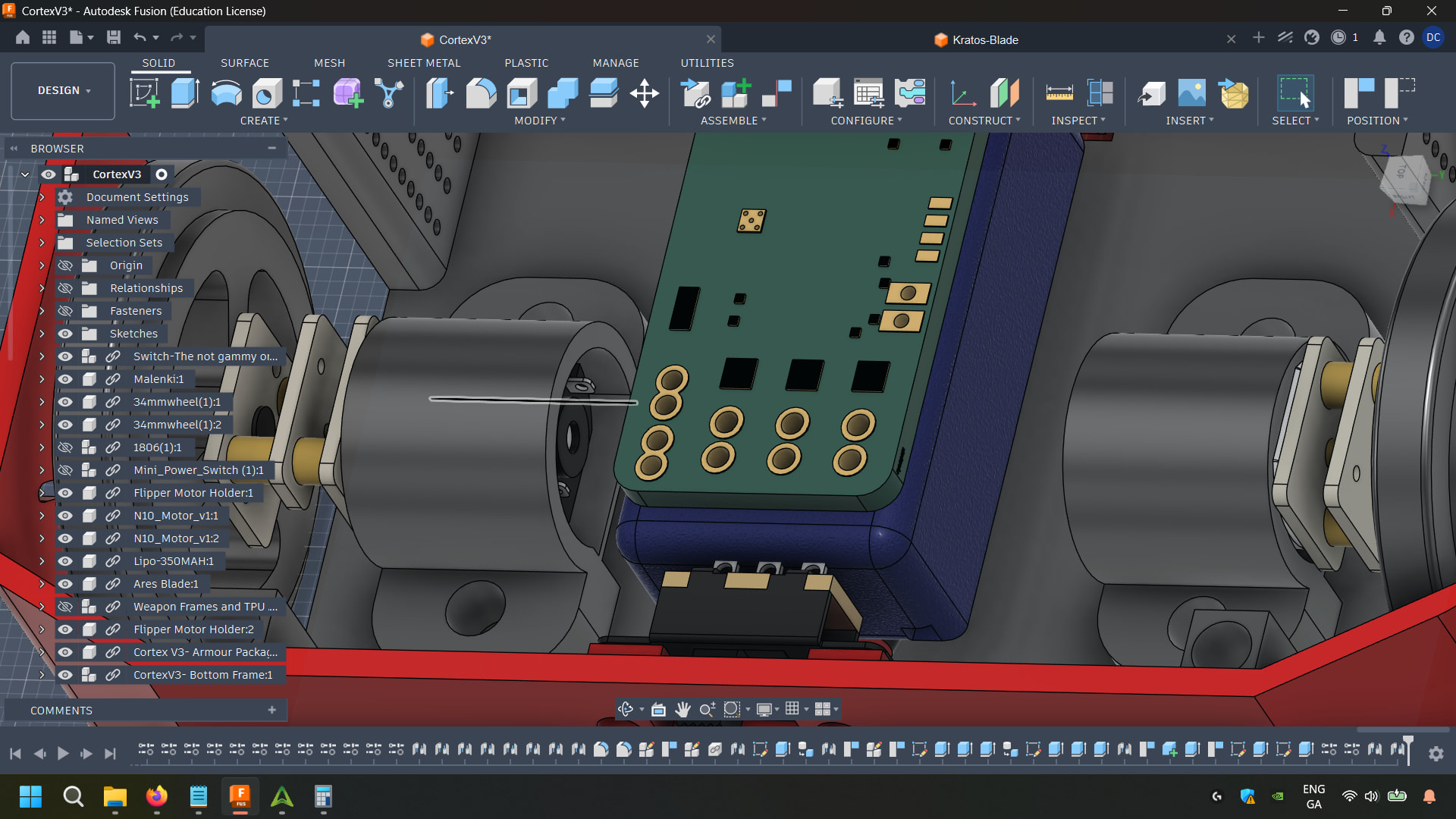
3 Weapon Motor Wire Tunnel: In the first version I simply zip tied the 2300KV’s wires onto the frame which went well…….
After this scare Ive gone for a cheeky tunnel under the chassis which will be covered with a very thin click on TPU cover, at max it will only need to take a random hit per fight assuming my blade is spinning, and if it inst spinning my least worry is that part of the robot lol.
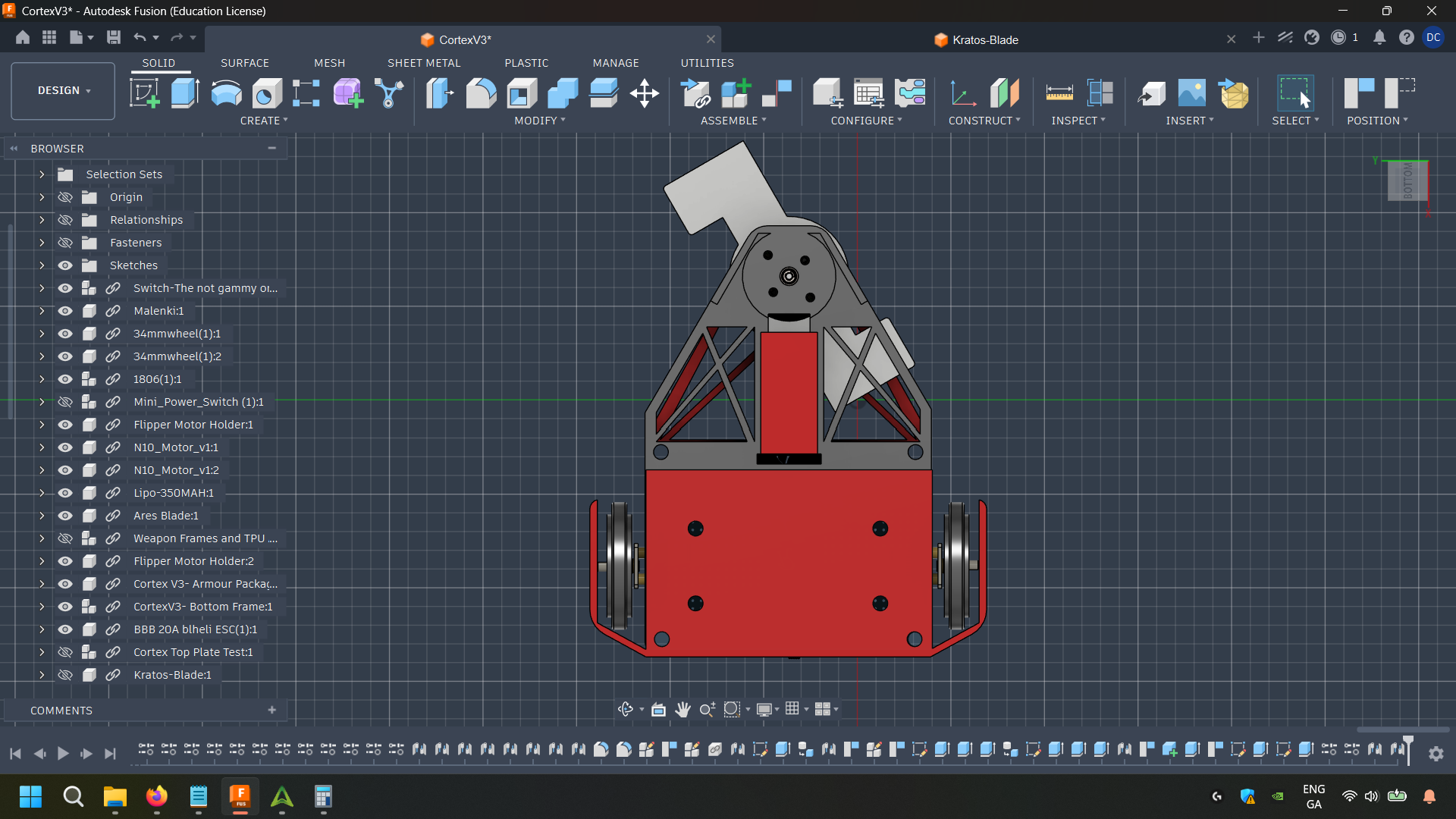
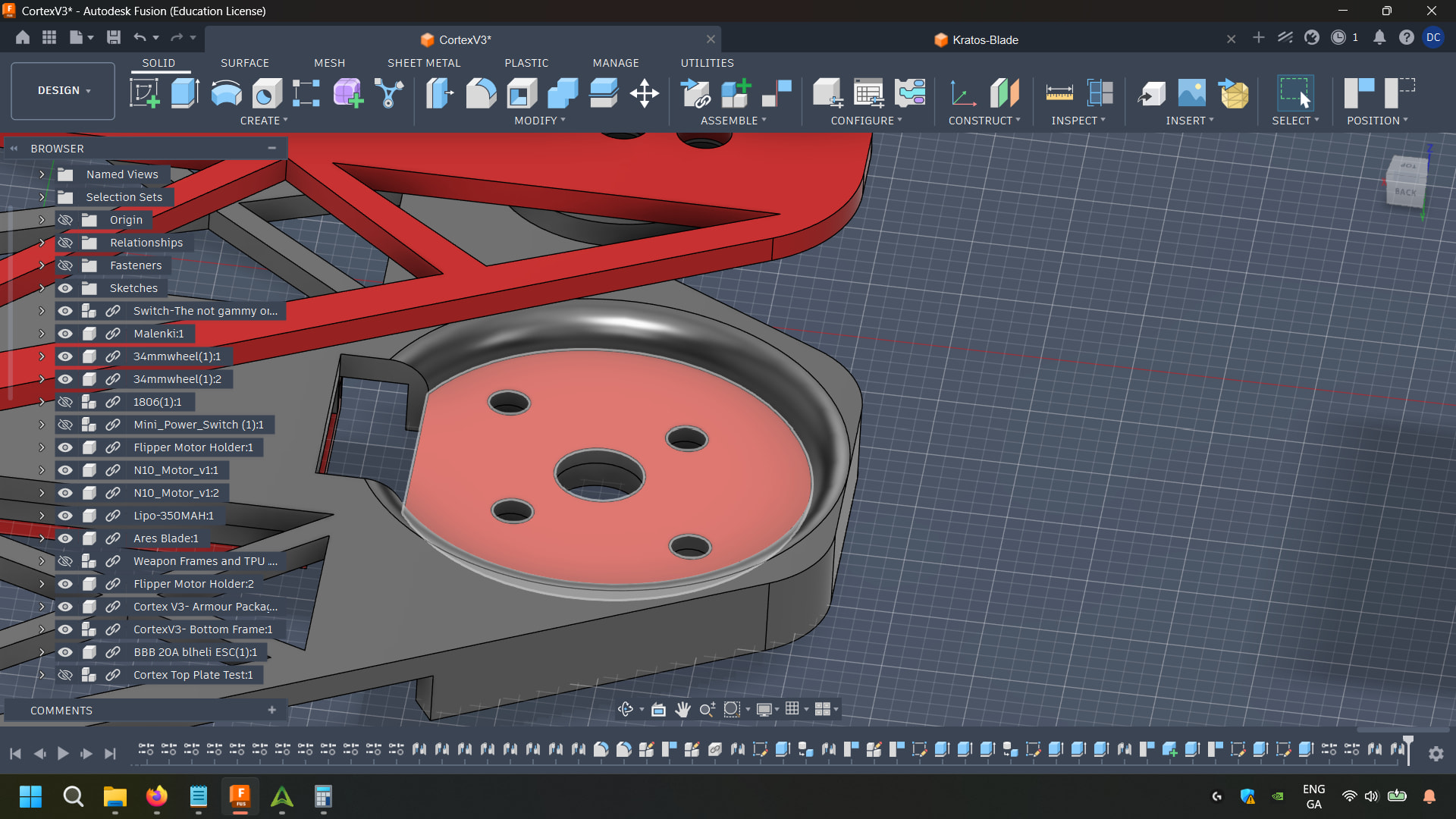
4 TPU Motor Cushion: In previous versions the vibrations from the weapon were crazy, while funny to watch my robot look like Mario after being burnt by lava in Mario Galaxy, it wasn’t very fun to control even at 70% speed, a small TPU cushion has been placed between the bottom frame the weapon motor, I’m pretty confident this will yield results since I did a similar thing with my leaving cert project with the same motors.
5 Weapon Configs: Now we are getting to the tasty part, and Ive gone to have 3 weapon bars, which will make this machine suitable for both PLANT and Full Combat classes respectively,
Config1-PLANT: For the PLANT, I have gone with a extremely chunky PLA++ bar, with the option of M3 screws to be embedded in for bite, (Note : I’m assuming this is certainly not allowed in PLANT contests maybe Ill try one in a whiteboard match one day, just thought of the idea for the memes).
Stats: With a spinning diameter of 75mm and a weight of approx 50g (weapon motor included here), we are talking around 26.7 joules at 170mph. I will have to conduct testing on the bite vs rpm in this setup but on paper I’m happy with these figures for a PLANT Config
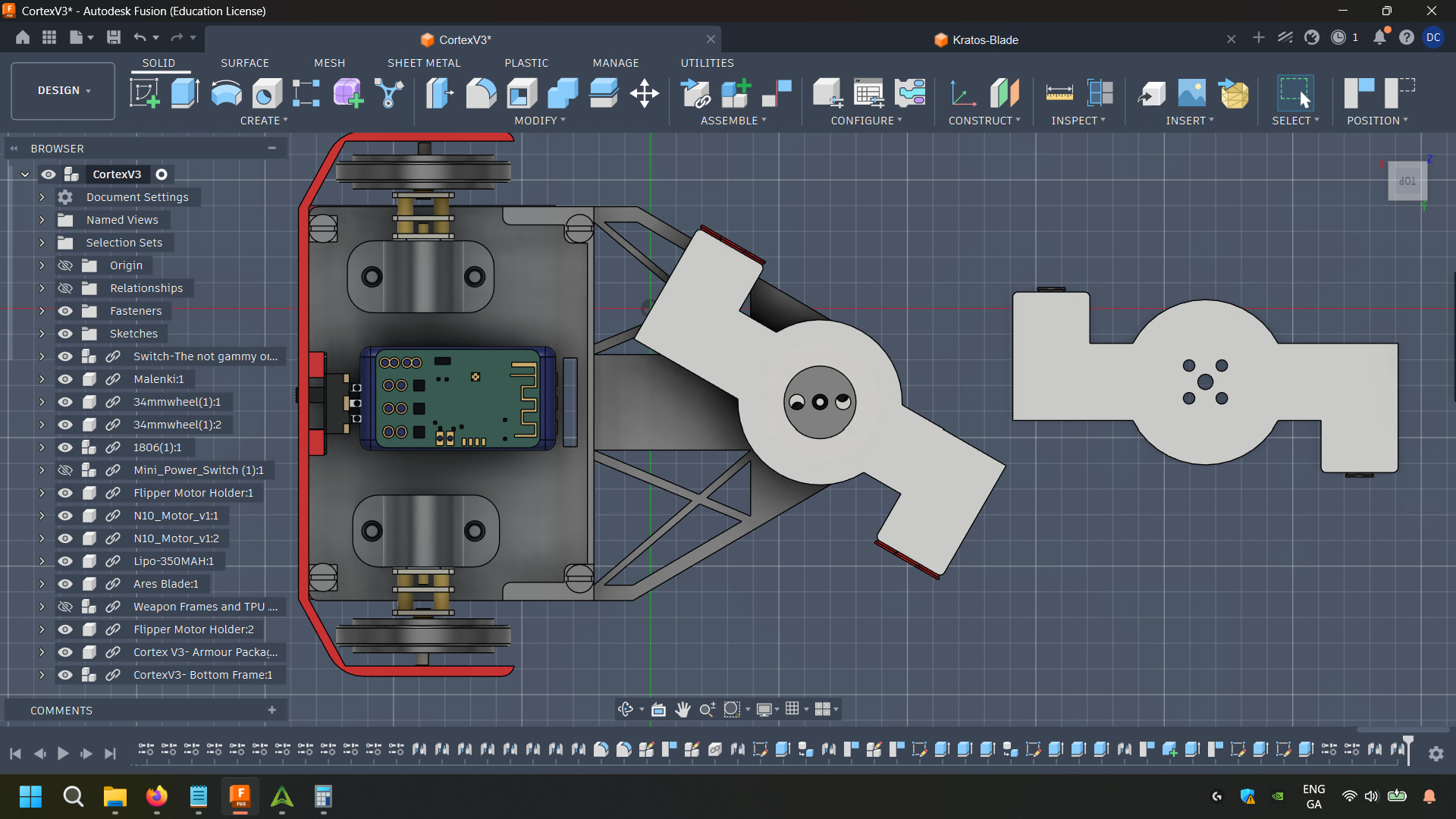
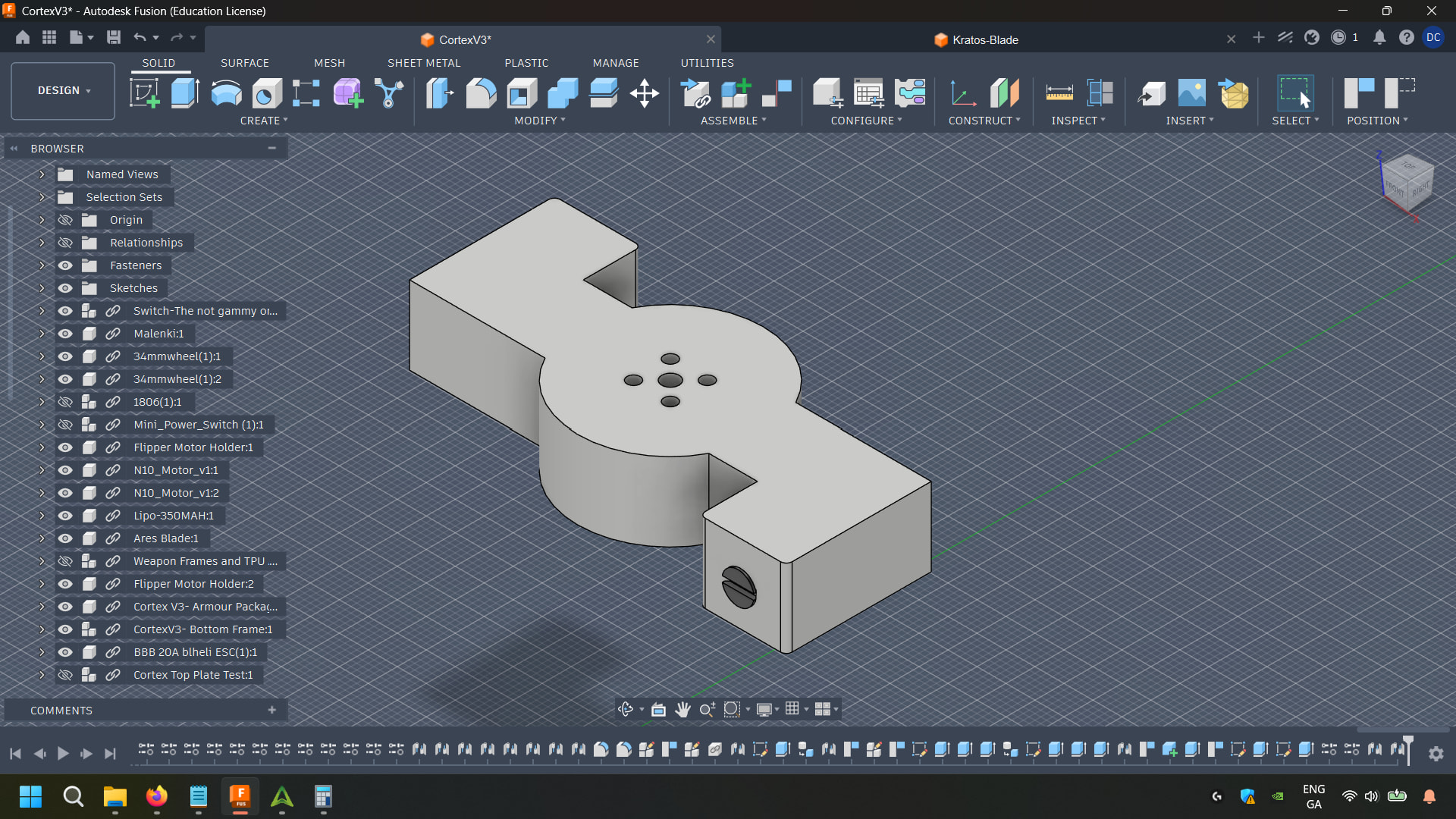
Config2-PLANT-Anti-TPU (Theory): Now if there is one thing I’m not a fan of its the abuse of the pin-rule, of course its not the fault of the builder/driver the rule is just a bit flawed in certain comps, it just can be a bit boring to watch, typically these bots are all TPU so my idea to counter is compass points….. hear me out.
The attachment process to the blade is a WIP, and I will ask for some guidance on the viability of this. The idea is simple, attach sharp compass points to the blade depicted above and those points will puncture the TPU, however if it gets lodged in the TPU the electronic stack is going to get cooked medium rare.
Config3-COMBAT: This blade has yet to be designed, will update once completed.
6 Miscellaneous Features: Other small details include
- Switch and Light addition
- Lip on the bottom frame to further reduce vibrations
- Detailing the top plate and back plate etc
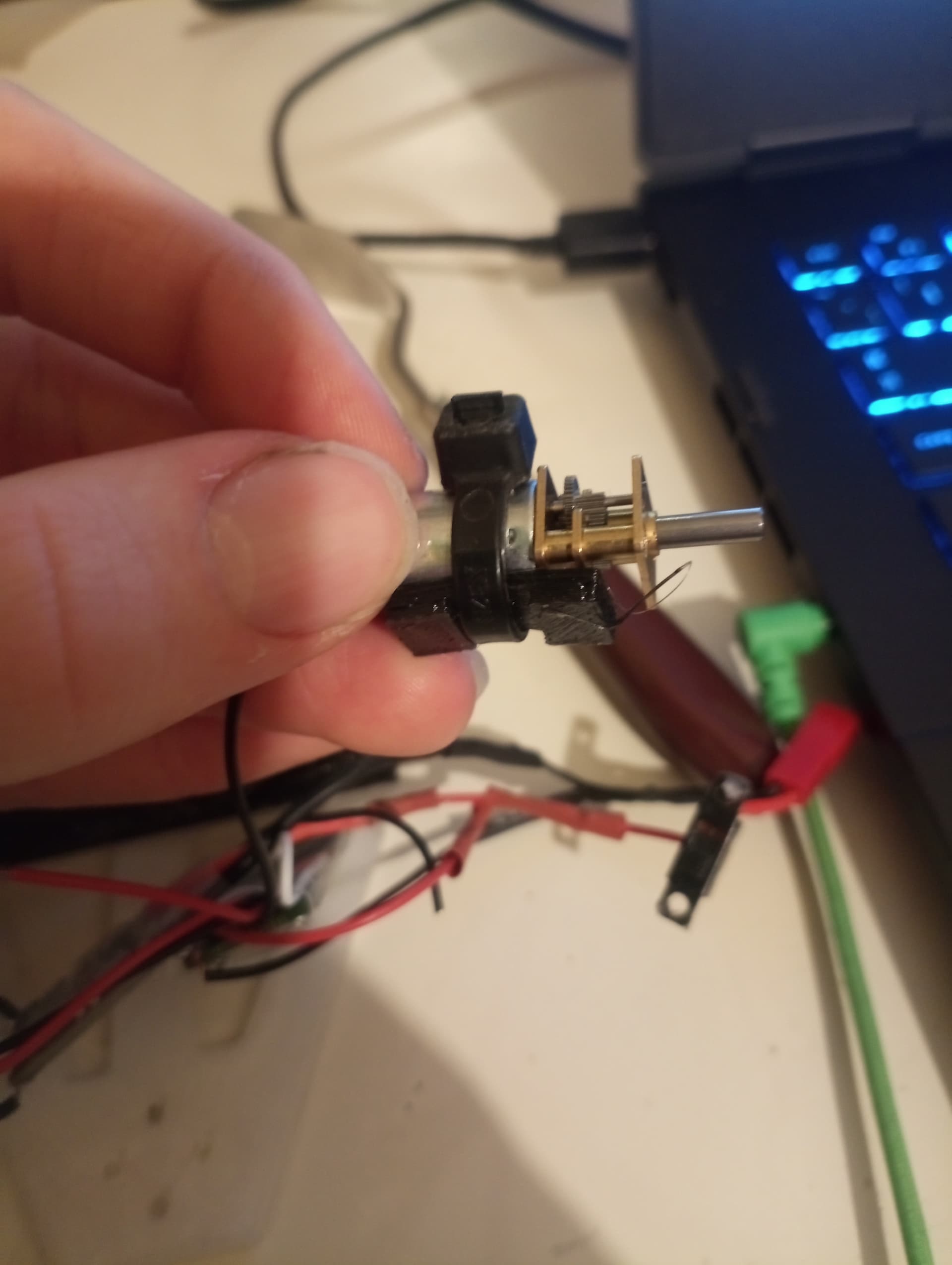
- N10 motor holders now snap on (PLA+ also)
Now the plan is to get to an actual competition by the end of this year with both this and my front hinge flipper “Blaze-Storm” which is also having a slight makeover in the coming weeks, I have said this in every post Ive made on this form… I know but turns out life is pretty good at throwing surprises.
Also I do have more than enough materials for a Beetle-weight which will of course be much more of a technical challenge but I’m certainly looking forward to drawing frenzy in round 1 and getting ABSOLUTELY humbled later down the road.
On a more serious note I will be updating and posting a good bit more on this site if all goes according to plan, so for the benefit of readers, am I correct in saying I should go into more technical detail and my thought process? or is a post like this entertaining to read since I’d rather not be wasting anyone’s time here.
- Danwii