Hi, I’m new to the whole combat robot thing. Been watching from the side lines for a long time.
I’ve got two kids (age 8 and 10) and we are looking at designing and building our first robot to compete in some fights in the UK. We came across BBB online and it looked like a good community for us to connect with, since we are not too far away (Leicestershire).
We have recently purchased our first 3D printer and we are at the early prototype stage. I just wanted to share some stuff on here, maybe people can offer some advice or useful links. Or maybe people are just interested to see what we are doing.
At the moment we are planning on making a 2-wheeled ant-weight, with a servo based grabber and a dustpan style scoop at the front.
Here’s a few pics of our materials and tests so far…
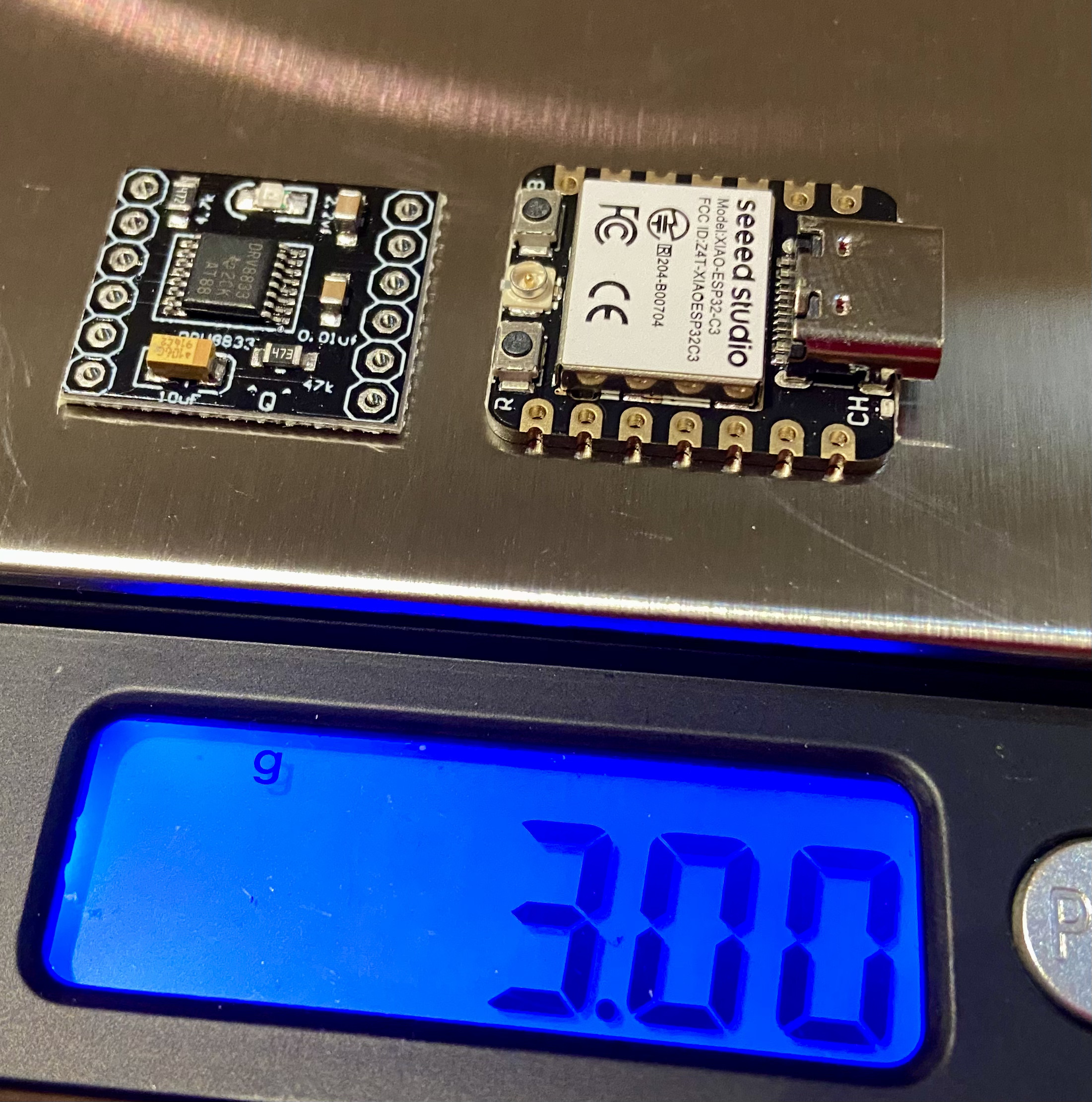
Looking good! Are you going to design your own controller with the ESP32?
If you want to do any test driving we do intermittent and informal get-togethers for members and guests at Nottingham Hackspace which is quite nearby for you.
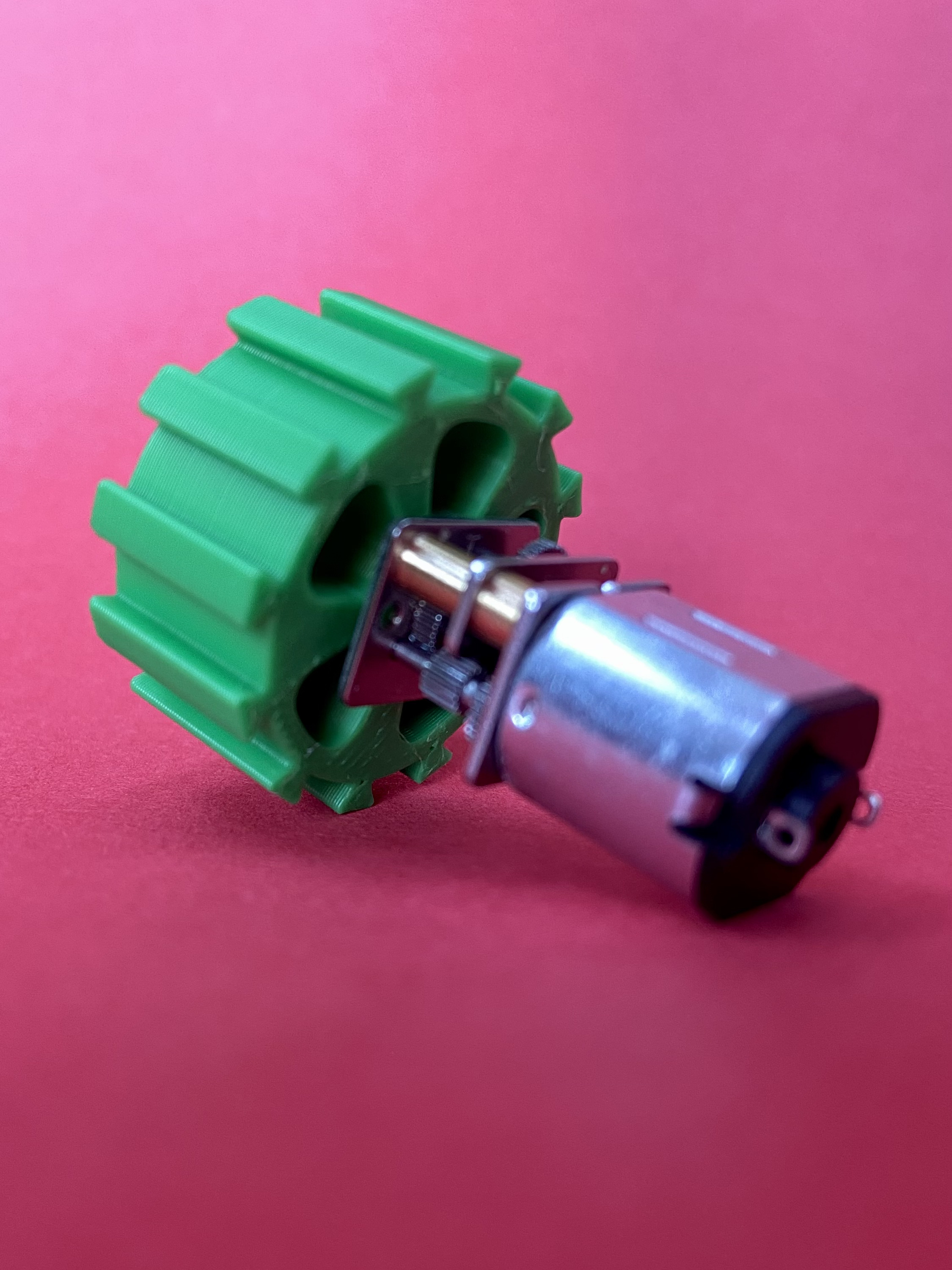
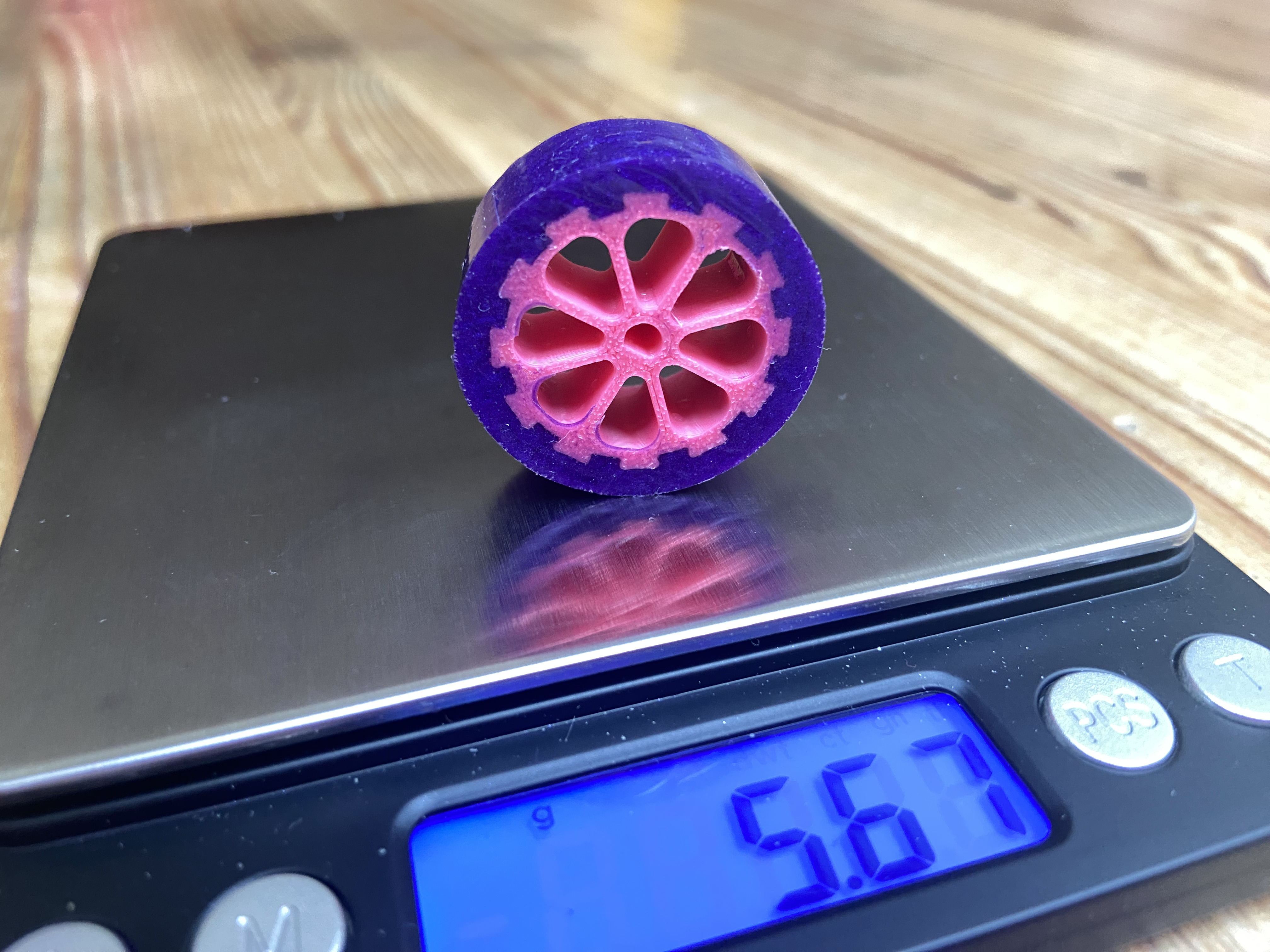
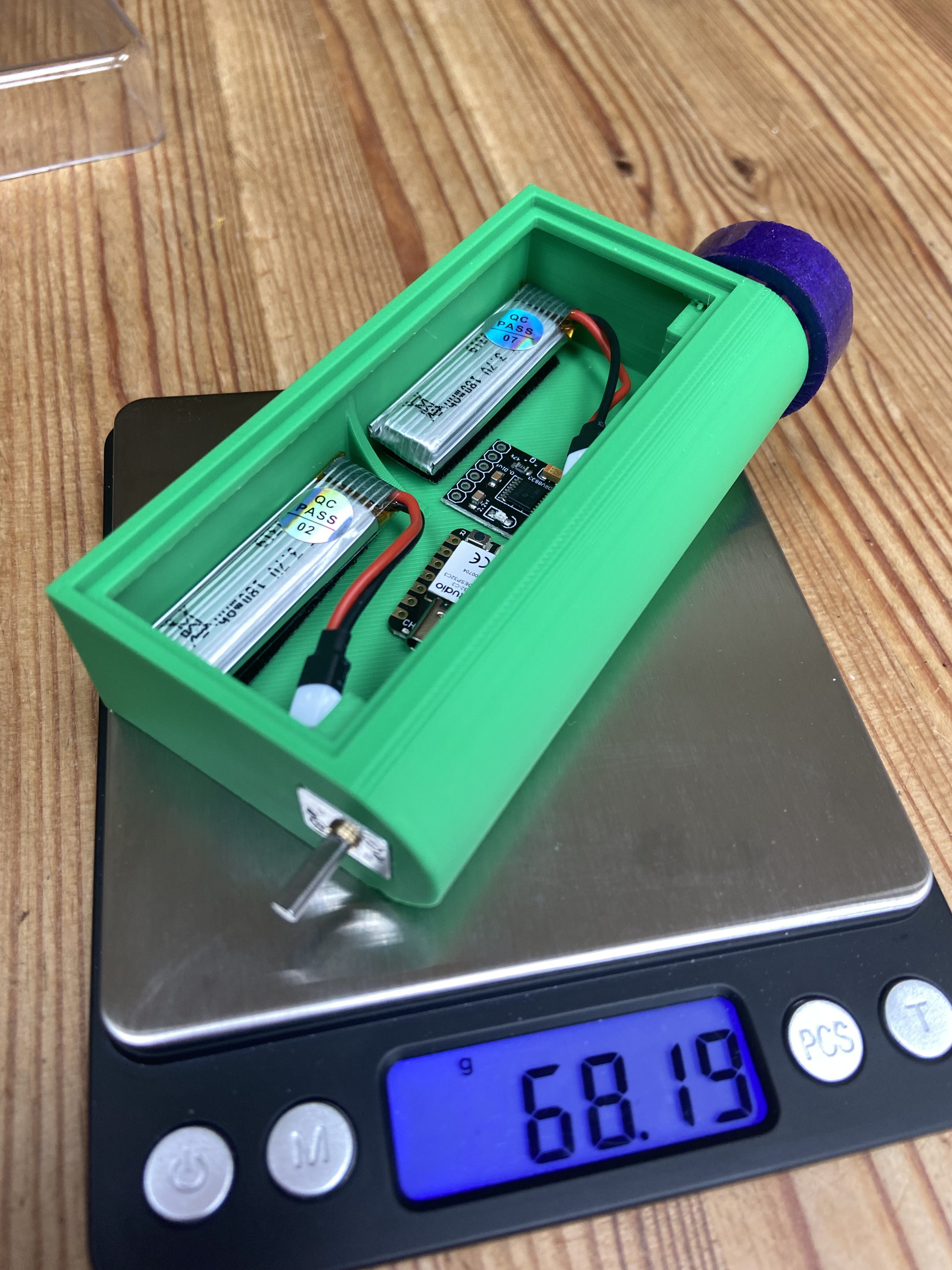
Oh amazing! That would be great, would be good to get some experienced eyes on it once we get it running. We have a basic sketch working with the ESP32C3 as a receiver, and we can control both motors and a servo with an XBox controller. I’m yet to implement the fail safe, but the Bluepad32 library has a function called on disconnect, so that should be trivial. Lastly, I’ll need to look into doing some mixing for the drive. I personally quite like tank steering, but I think my kids would probably find it more intuitive if they could drive about with just one analogue stick. Would be nice to build our own controller, maybe one day we will look into that, but for now we will just use the XBox one. Just waiting on some SMD voltage regulators, then we can get the electronics all wired up to the batteries, that should give us a better idea of the final weight for the electronics. Think I’m quite happy with the wheel design, they are not the lightest, but since we only have 2 of them and they have 12mm wide tyres, I’m happy to spend that weight budget for added traction (hopefully). Still mulling over ideas for the servo placement and the dustpan design, so plenty of things to work out yet!