Elevron
While Revron has been thoroughly documented, with sprinkles of Shoveron thrown in, the third bot of the Chevron-themed trio had remained largely incognito until now. Elevron is a little different from the others and is a collaboration between me and my little brother. Up to the end of 2023, he had run Shoveron at a few competitions and really enjoyed it, so I figured it’d be fun to give him a pencil, have him sketch something out, and then I’d build it for him.
After watching some NHRL and Battlebots for inspiration, he eventually settled on a mix of Claw Viper, Overhaul, and a few other key details, including a green arrow on the top. With my design brief in hand, I set off with the CAD and decided to try out a cable-actuated lift and grab mechanism.
V1.0
The first version’s chassis and armor for Elevron came together pretty quickly, with many of the lessons I’d learned on previous bots coming in handy. The chassis was designed to be PLA-ST, and the wedglets and armor TPU to give decent durability.

(V1.0)
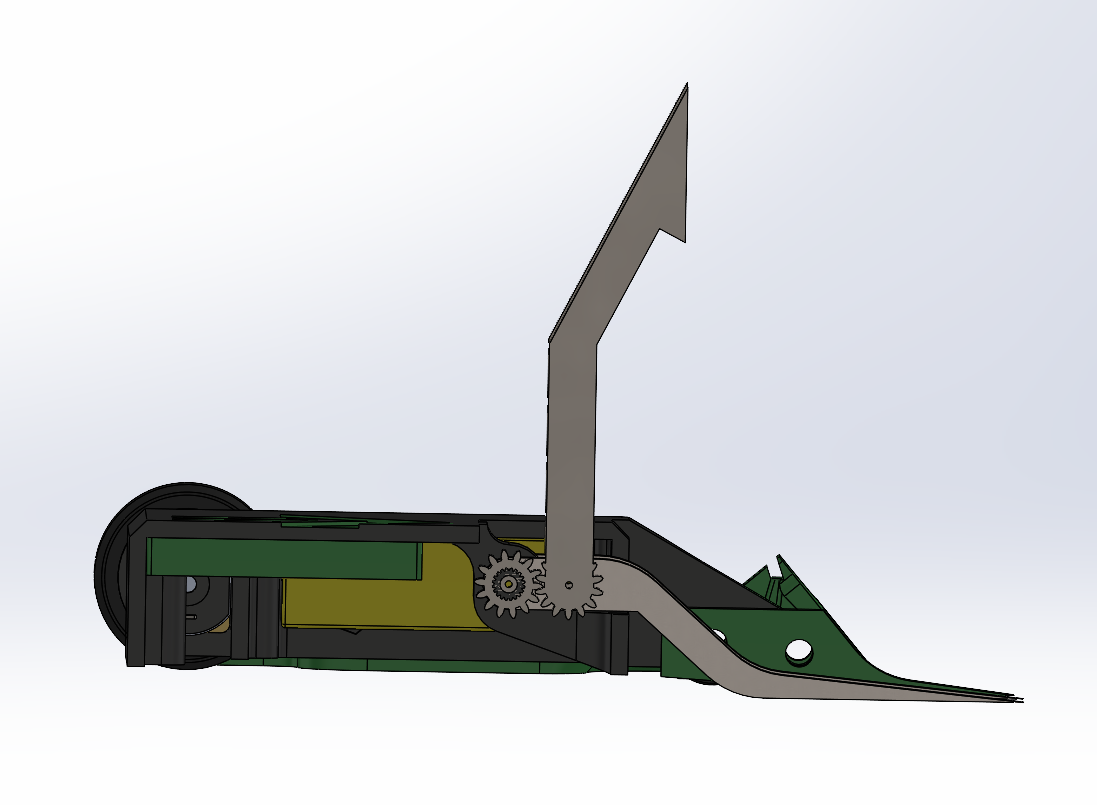
The most interesting part of the design is the lift and grab mechanism. This worked using 0.5mm stainless braided cable, three pulleys, and the grabber pivot. The cable is constrained between the servo pulley and the grabber pivot. When the servo is actuated, it pulls on the cable, first bringing the grabber arm down and then lifting via the three pulleys. It took a few attempts to get the mechanism right, but eventually, I got it working reliably.
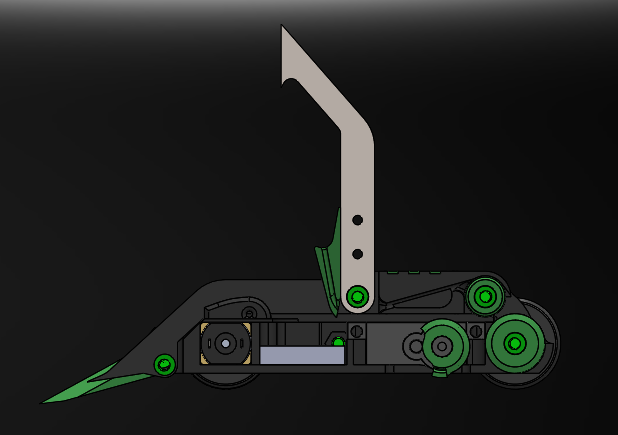
(Step 1 - Cable is loose and grabber arm is up)
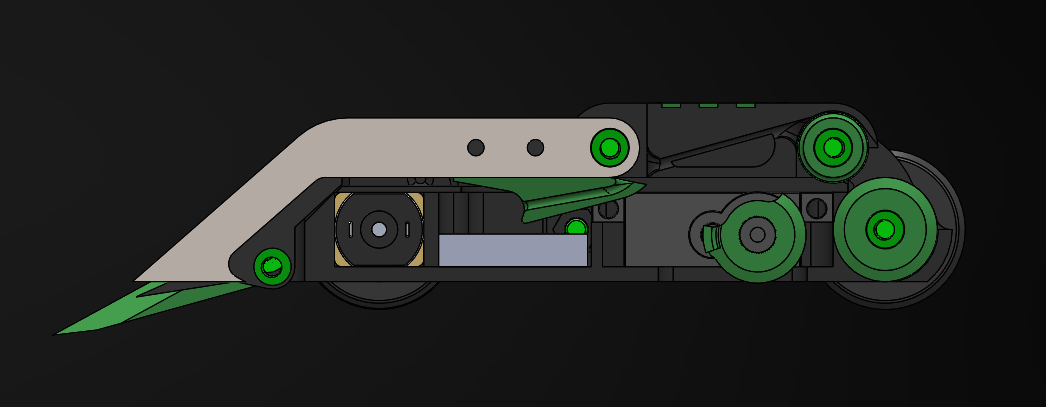
(Step 2 -Servo rotates pulling on cable and lowering grabber arm)
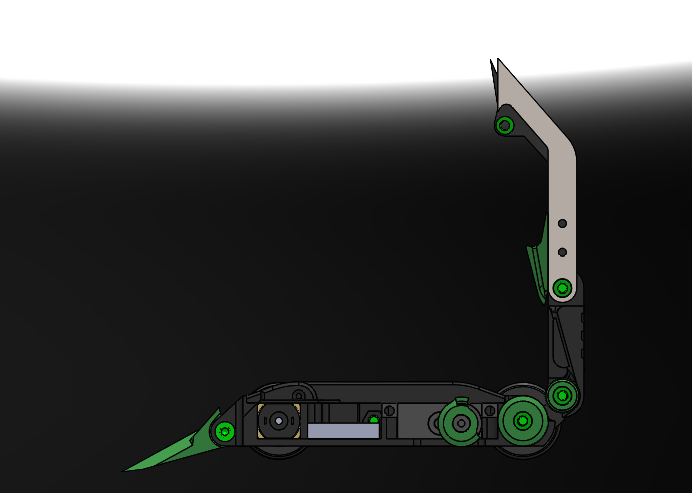
(Step 3 -Grabber arm locks and then the lifter arm is rotated around the back pulley)
This system seemed to work reasonably well and allowed for much more compact packaging than would usually be possible using a geared system.

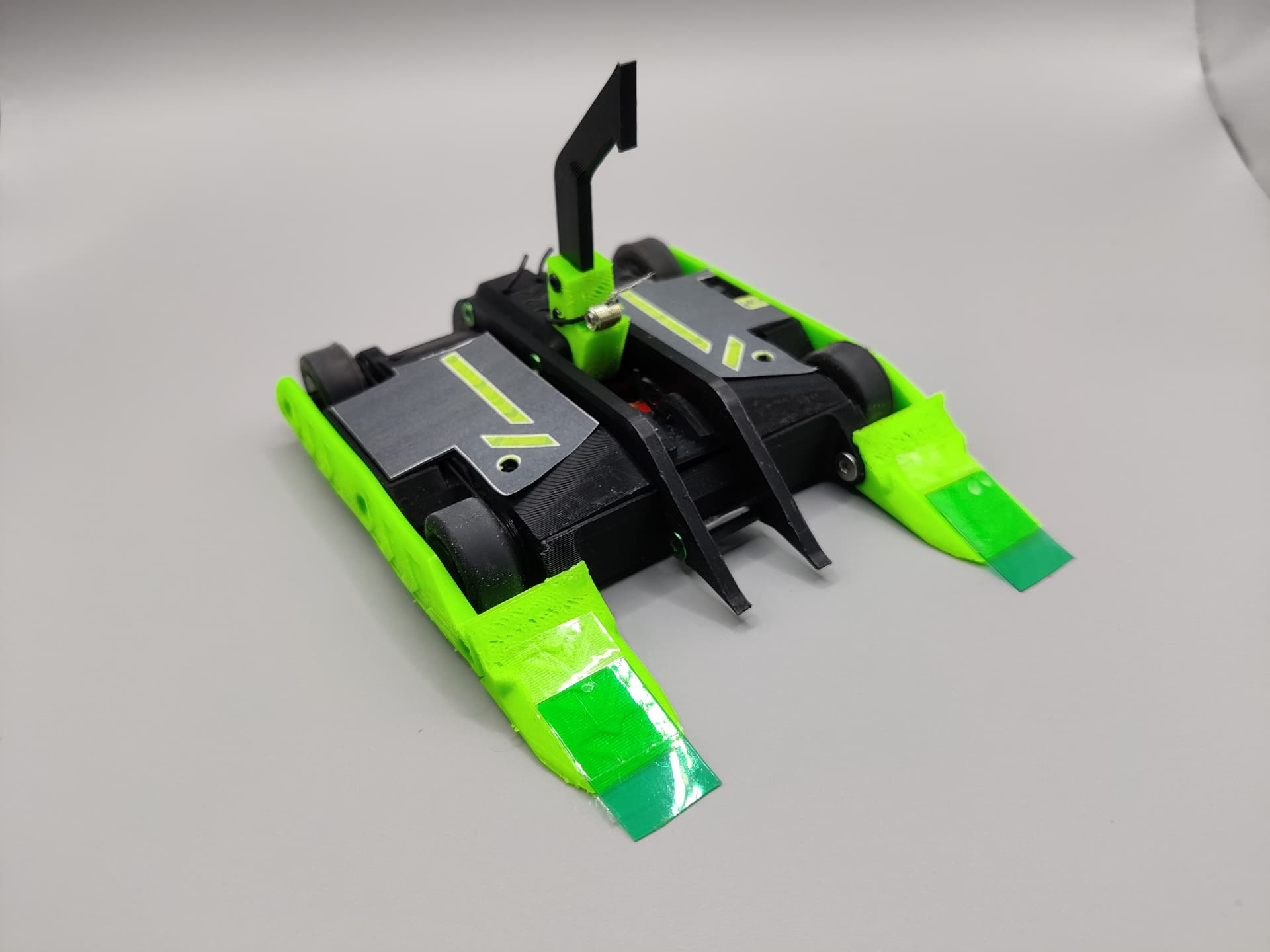
(Initial grab and lift tests)
SCAR 7
Elevron did pretty well at SCAR 7 with two wins and two losses to the eventual second-place finisher, SUPER PANTHERK, and the eventual winner, Beater Griffin. The chassis and armor package proved durable with very little damage sustained overall.
Despite the reasonable showing, a few design weaknesses were exposed. Mainly, I’d used elastic as the return mechanism for the grab and lift. This meant that if the arm got stuck at full extension for any reason, it couldn’t be actively moved by the servo and would tend to stay there. This exact failure mode happened in the SUPER PANTHERK fight.
A secondary issue was cable slip, which reduced the range of motion over time.
(Elevron ready for SCAR)
Do it again
I decided to build up a copy of the robot for myself, “Elevron Red,” so I could try the design out at a Sheffield roboteers event and see if the cable concept was worth iterating on or if it was time to redesign from scratch. At this event, I also went two wins and two losses; however, I quickly got frustrated with the cable setup.
It became damaged in an early fight, and replacing and correctly tensioning the cable was a nightmare. It’s a very fiddly job, and if the cable end frayed at all, it had a tendency to unravel as I tried to thread it through the various pulleys. At this point, I decided it was time to call it quits on cables and head back to the drawing board.
V2.0… do it again, again
The idea with V2.0 was to move over to a geared system and cram it all into a slightly modified Revron chassis so the drive and armor package could be interchangeable with Revron, and I could have a smaller spares pool. While these systems typically use three gears, I opted to use two and then to axially align the gear connected to the servo and the pivot point for the lifter.
(Cutaway view of the geared grab lift mechanism)
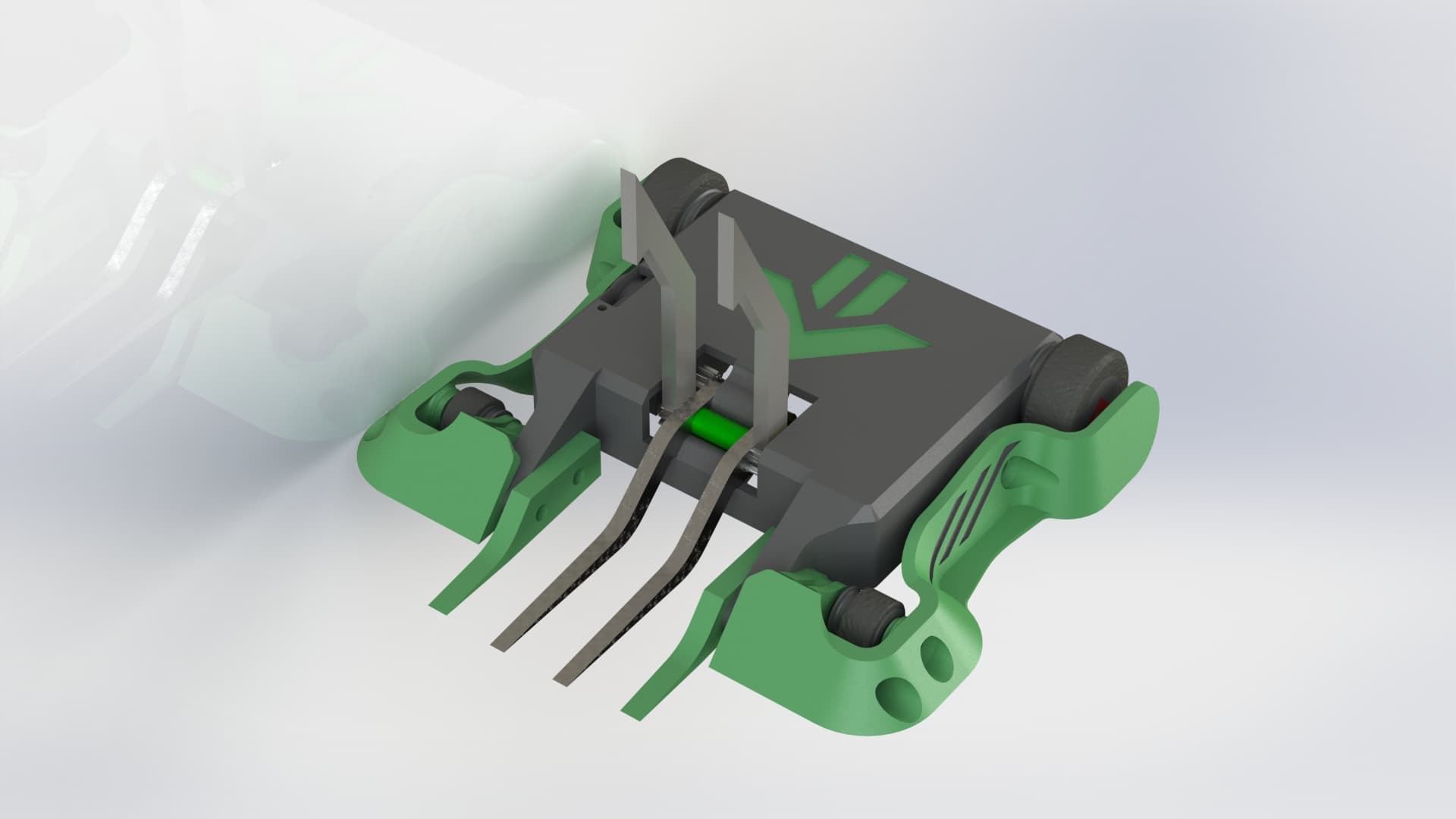
(Final CAD)
This bot digitally looked great; however, after building the first prototype, I had constant issues with maintaining gear meshing due to the low gear module I’d chosen and the tolerances of a few parts. I’d also designed myself into a corner because of the tight chassis, meaning I couldn’t increase the gear module without having to redesign everything and losing the interchangeability that had dictated the form factor in the first place. Unfortunately, I wouldn’t be able to make SCAR 8, so it would be a while before the next event, and the project was shelved for a little bit while I stewed over new design ideas.
V3.0 Grab and lift vs Grab or lift
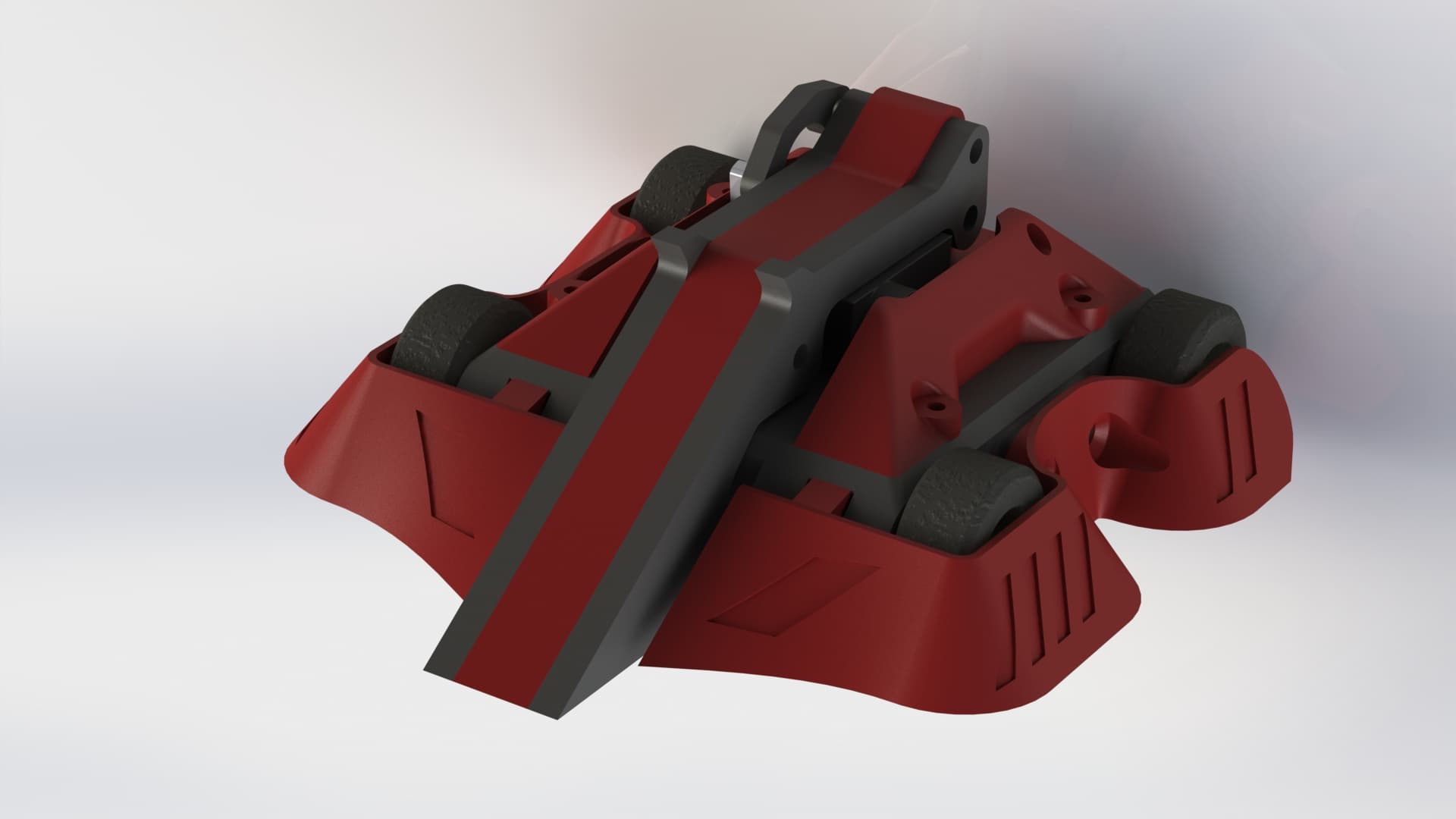
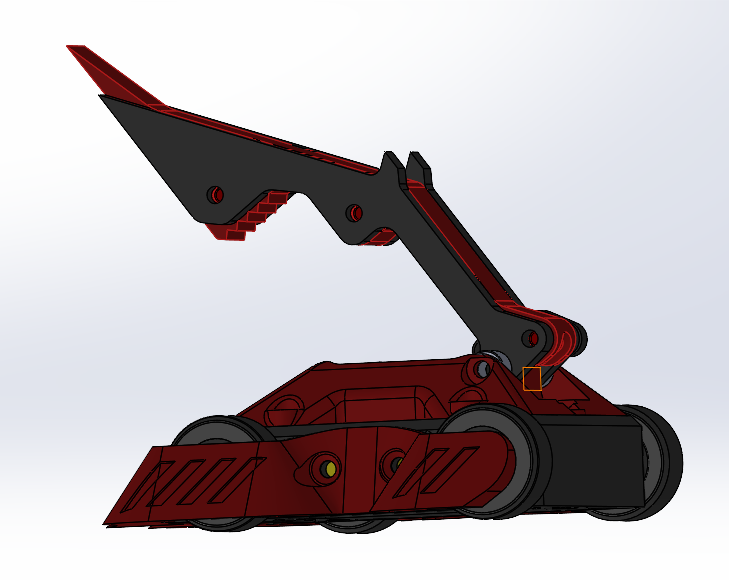
(Elevron Red V3.0)
Many of the issues with the designs so far have come from trying to do two things together: grabbing and lifting, and then being mediocre at both. I decided that simplifying things and focusing first on drive, then on lifting, and then on grabbing was the way to go. I discussed this with my little brother, and he seemed keen to try something new, so for the third time, it was back to the drawing board.
One of the big differences between V1.0 and V3.0 was component availability. Ranglebox started stocking extremely fast 3000 RPM N10 motors, and the added speed from these is a massive advantage for a control bot. I elected to use four drive motors instead of two to help make up for the decrease in torque that comes along with such high-speed motors. These were paired with four Scalextric F1 tires to create a super-fast, super-grippy platform. The wheelbase was shortened from previous versions to increase turn speed. The lifter and servo mounting brackets were printed in TPU to help cushion any impacts from spinners and protect the servo and chassis. Finally, to allow for grabbing, I added a serrated section to the back edge of the lifter arm, and with that, the CAD was complete.
SCAR 9

(Revron and Elevron Red ready for SCAR 9)
Unfortunately, my little brother was busy the day of SCAR 9, so I printed all the TPU bits in the signature red of my robots and decided to take the bot along myself to give it a shakedown.
I had pretty high hopes for the design going in; however, the first fight was against Danger Cone, a massive propeller-driven spinner with a single wheel at the back and just about the worst thing for something with an uncovered servo linkage on top.
As “3, 2, 1, fight!” was called, I sent the stick forward, and the speed was just incredible. The bot was across the box in an instant. It tanked hit after hit and eventually flipped Danger Cone onto its face to take a maiden win for the new design.
The next fight was against Hex, a pretty nasty horizontal spinner. I was able to keep it off-balance from the start, eventually flipping the bot upside down, getting a grab, and posting it neatly into the pit.
The final qualifying fight was against a very wide wedge called Janet Street Porter, and by this stage, I’d gotten a feel for the speed and grip levels in the box. This was a KO in 12 seconds, with the speed of the bot allowing me, once again, to keep the opponent completely off balance. I’ve linked a clip of this fight below.
https://youtube.com/clip/UgkxTJ2a5QeXcEcoyg2bS5h50FTvT6VGLvdq?si=sFg3YGjtgVAjdGkv
Elevron Red had qualified for the tournament, which was great news. In other great news, Revron had also gone undefeated. In slightly less great news, four roboteers, including myself, had gone undefeated with two bots, and time was running out for the event, so we could only do a round of 8, not the usual round of 16.
This made for a pretty tough decision; we’d each have to drop one robot. For me, much as I was torn, I’ve spent so much time iterating on and driving Revron, it made sense to drop Elevron. So it ended the day undefeated in the arena but ultimately out in favor of my other robot.
Revron went on to take third overall after some more great fights. I had an ace day at SCAR, and hopefully, Elevron will be back in green with its proper driver for SCAR 10 when that rolls around!