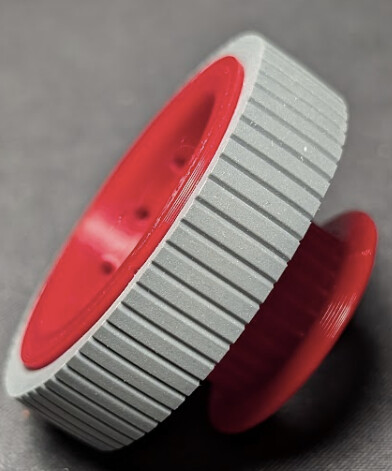
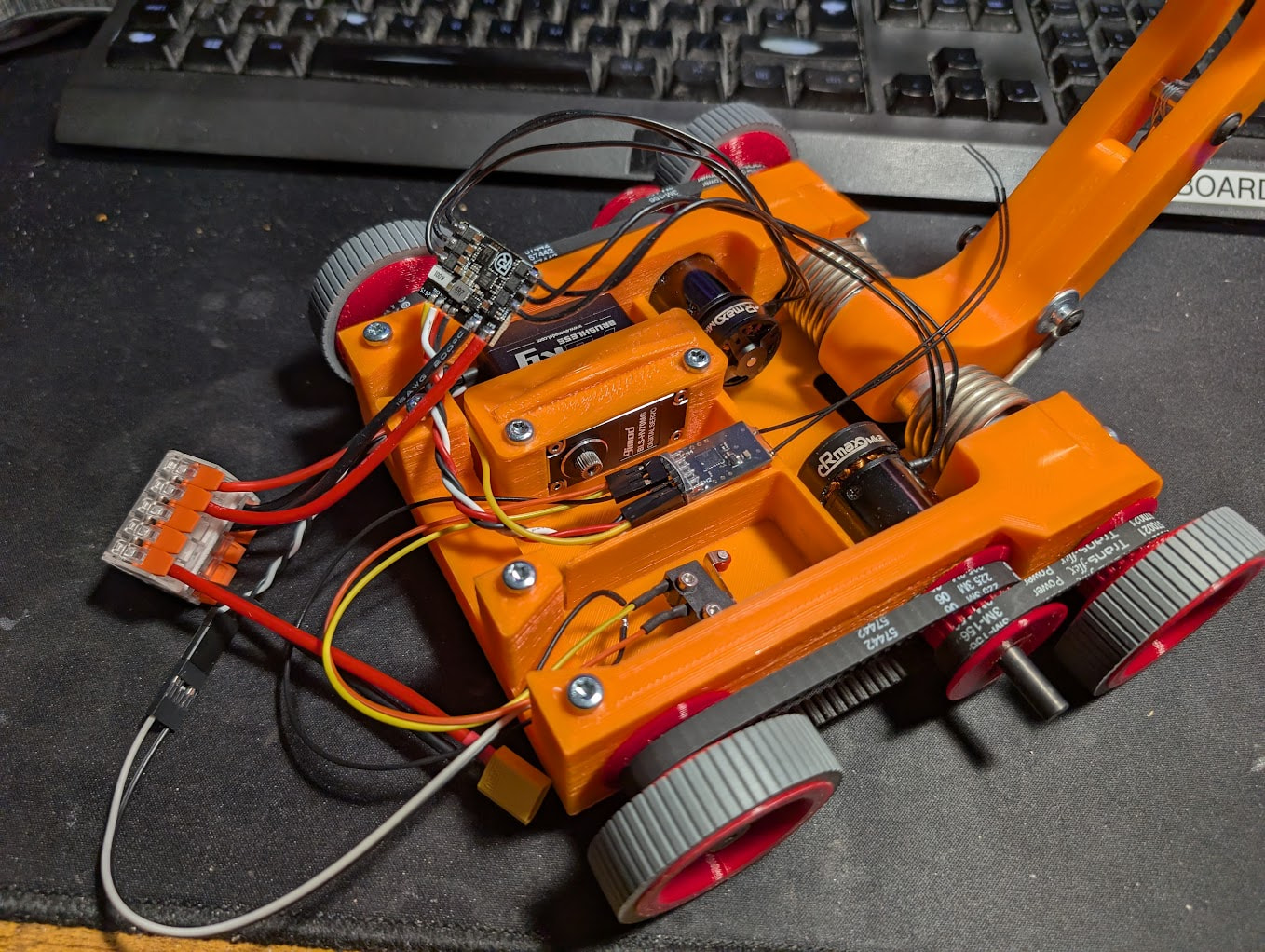
Fig Roll 1 - before it’s first competition.
The Idea
I’d been running Digestive, my 4WD hub motor vertical spinner, since Rapture 2022 and after a disastrous first showing for Digestive 2 at Rapture 2025 I wanted to try a more interesting bot. Digestive was designed to be a simple, boring (hence the name) 4WD vert that was competitive. It was not, despite winning a most destructive award one year, it never made it through the round of 16. Certainly not the top 4 results I was hoping for. I figured that rather than get too frustrated I should focus on what interests me most about robots, making weird overly complicated ones!
Ever since first watching Chaos 2 on RW I’ve loved the idea of flippers and using my opponents weight against them. Modern robots can handle the high shocks of hitting the floor from height so it’s not as effective a weapon as it used to be. However throwing your opponent in the air is the best spectacle in this sport, and flippers are good at that! Unfortunately a full pressure CO2 system is too heavy and very rare at the beetleweight scale.
The Inspiration
Dead Air, a US 16oz combat robot, uses a spring and a motor-driven cam to load and release a spring which it then uses to flip opponents. I loved that idea and wanted to scale it up and adjust it for a UK 1.5kg beetleweight. In preparation for this I ended up buying a pair of torsion springs back in 2013. They sat unused for many years because I got distracted with other designs. But with Digestive 2’s rapid and painful exit from the competition at Rapture 2025 I got inspired by Flick 2.
Josh’s Flick 2 is a very nice spring flipper using 6 tension springs and a servo driven choo-choo mechanism. Now I’d been interested in choo-choos since Tantrum debuted with one at BattleBots but I found that they had a very short ‘throw’ distance compared to their operating diameter. A long time ago I remembered watching a video of a FIRST Tech Challenge team explaining their catapult system. They had a spring loaded catapult arm being pulled down by a string winding around a pulley. However the pulley had a wedge cut out of it so that after a number of turns the string would slip off the pulley pulling the rest of the string off the pulley. This would then release the catapult arm, launching a ball across the arena. Unfortunately I can’t find any evidence of the video at all.
This is your typical choo-choo mechanism:
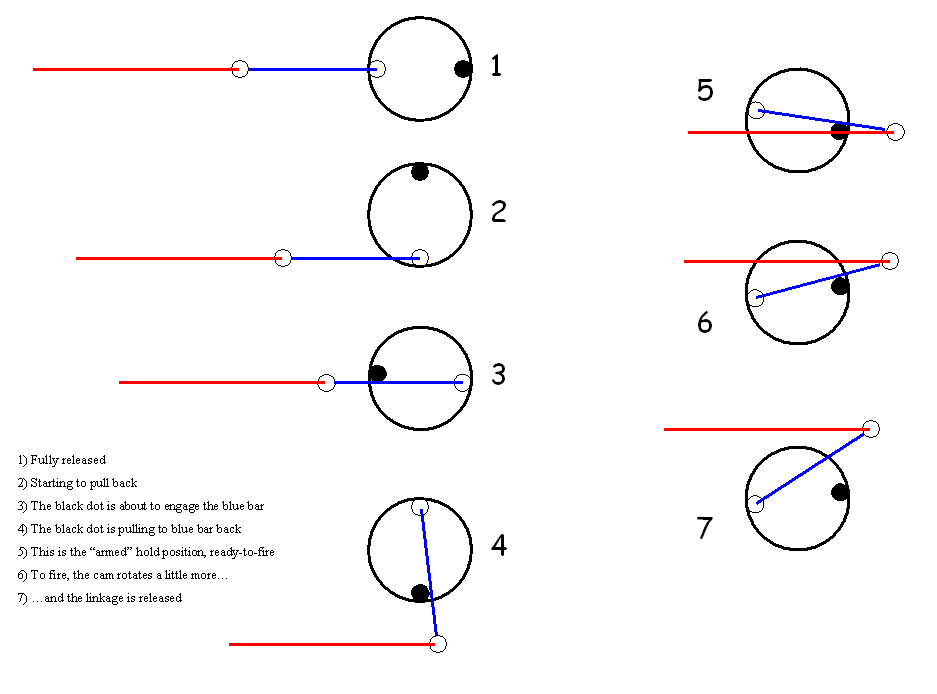
The difference in the position of the red line at position 1 (fully released) and position 5 (armed) is the distance the flipper arm would get pulled down in my spring flipper. However in order to operate I need to have enough clearance for position 4 and the position between 7 and 1 where the blue line is vertical. That’s a lot of room required for a given pull down. The string & modified pulley just needs the pulley diameter plus a bit of clearance. Much more compact.
The Mechanism
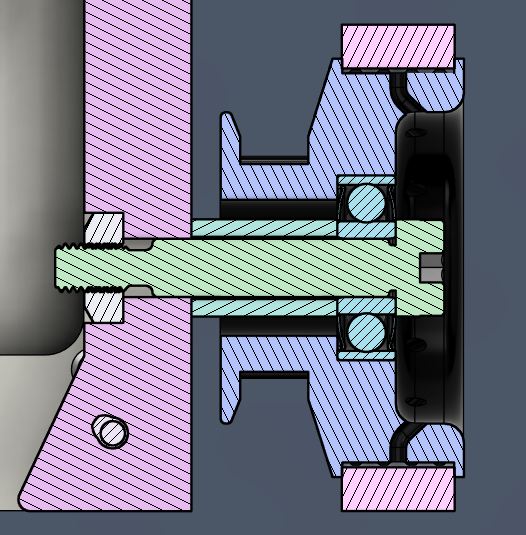
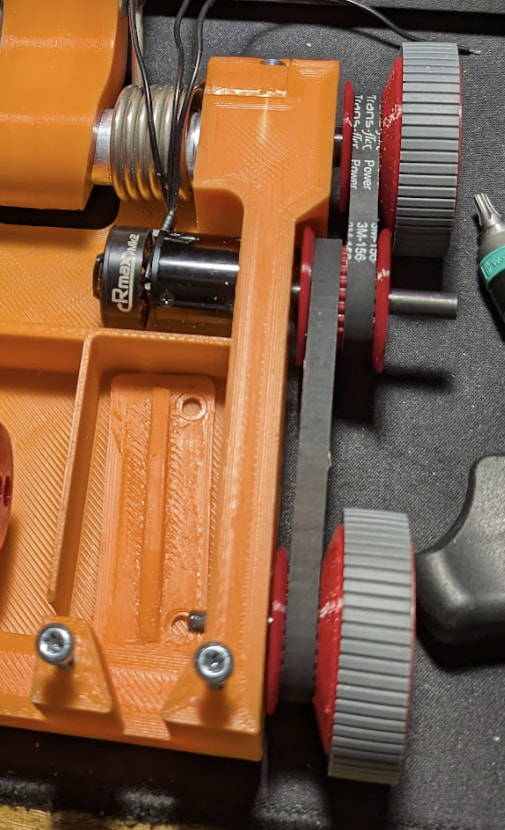
The core of this design is the helix transition. Unlike a standard pulley that has flanges on each end to contain the string, this pulley features a ramp at the end of the winding area.
- As the motor turns, the cord wraps around the pulley, pulling the spring loaded lever arm down.
- Once the string reaches the end of the flat winding surface, it hits the ramp. The lateral force from the angled surface overcomes the friction holding the string in place.
- Because the string is under tension, the first loop slipping off creates a “slack wave” that destabilises the friction of the remaining loops. The entire stack collapses and “kicks off” the pulley in rapid succession.
This mechanism has some great advantages:
- A single wrap around the pulley is the pulley diameter * π so a 30mm diameter pulley can wind up ~95mm of cord per turn.
- Multiple wraps will still get pulled off e.g. 3 wraps of a 30mm drum is ~283mm of cord which is way more ‘throw’ than an equivalent choo choo mechanism, let alone a snail cam.
- As the pulley is a constant diameter which makes it easier for the motor to pull down the lever arm as you near the end.
Of course it’s not all brilliant:
- Every time a loop of the string slips off the pulley it adds a twist to the string. If these aren’t taken out of the system the string’s effective length gets shorter which will jam the mechanism.
- If the robot suffers a large shock from a spinner hit then it’s possible the string will jump off the pulley prematurely.
- You need to be reasonably accurate with the length of the cord and the placement of the slope otherwise it will either fire early or it’ll jam.

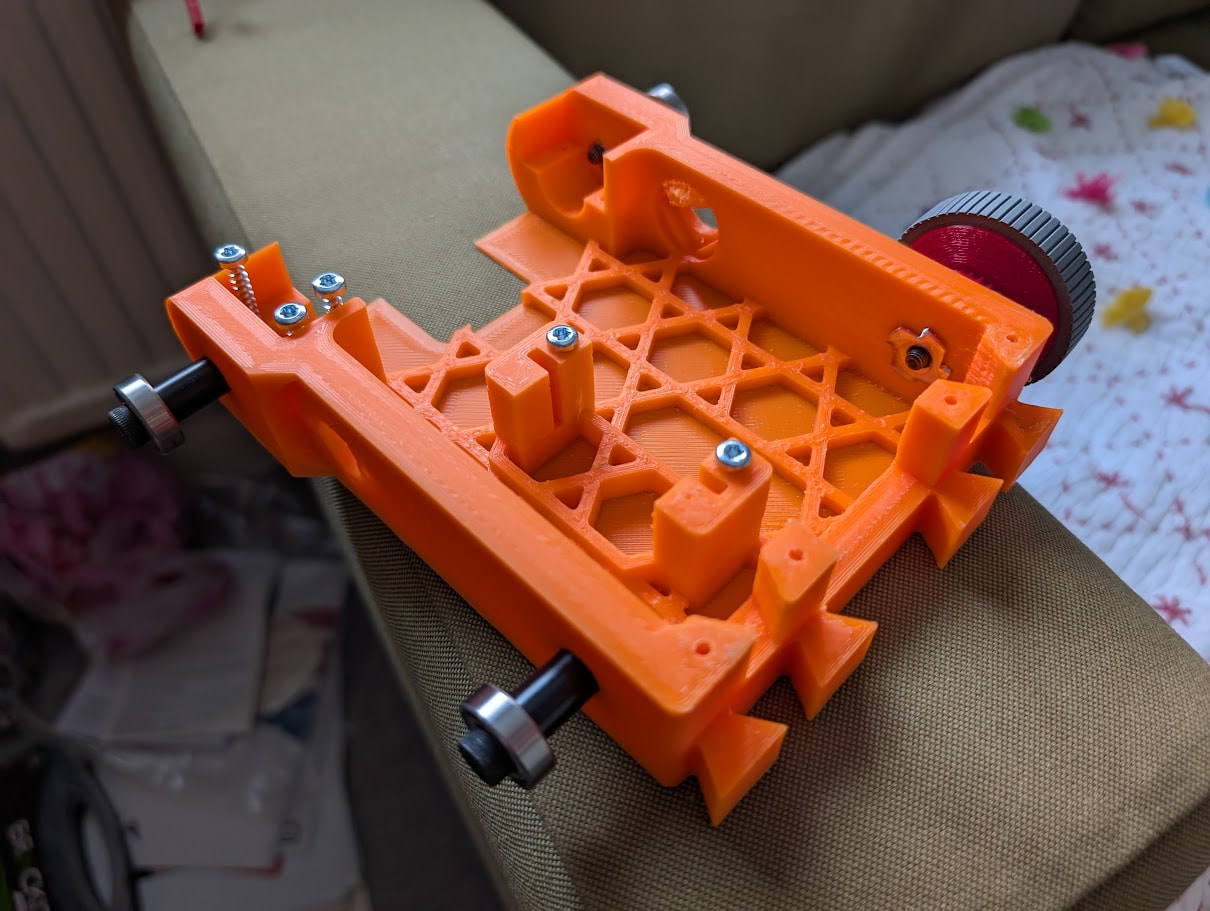
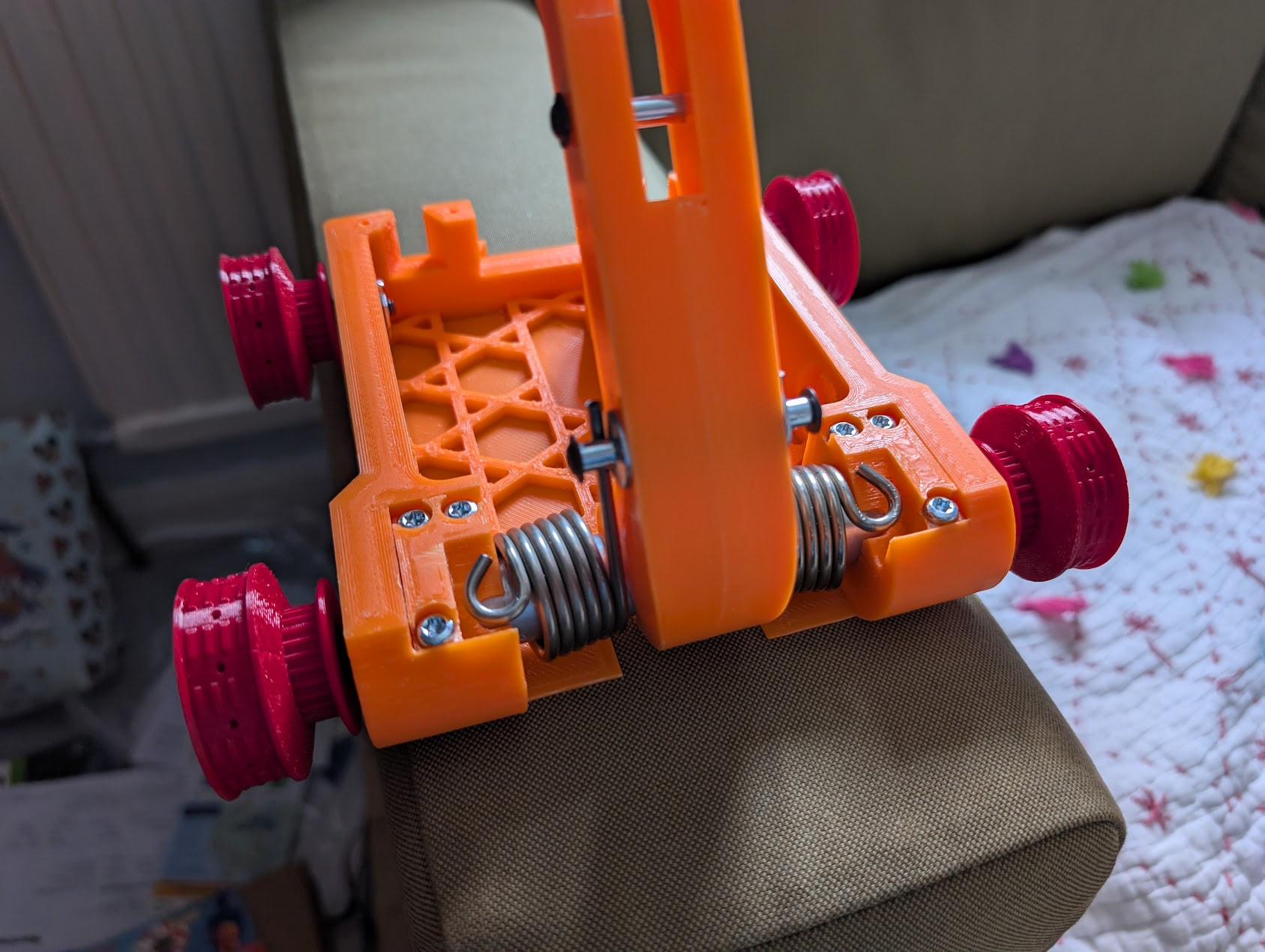
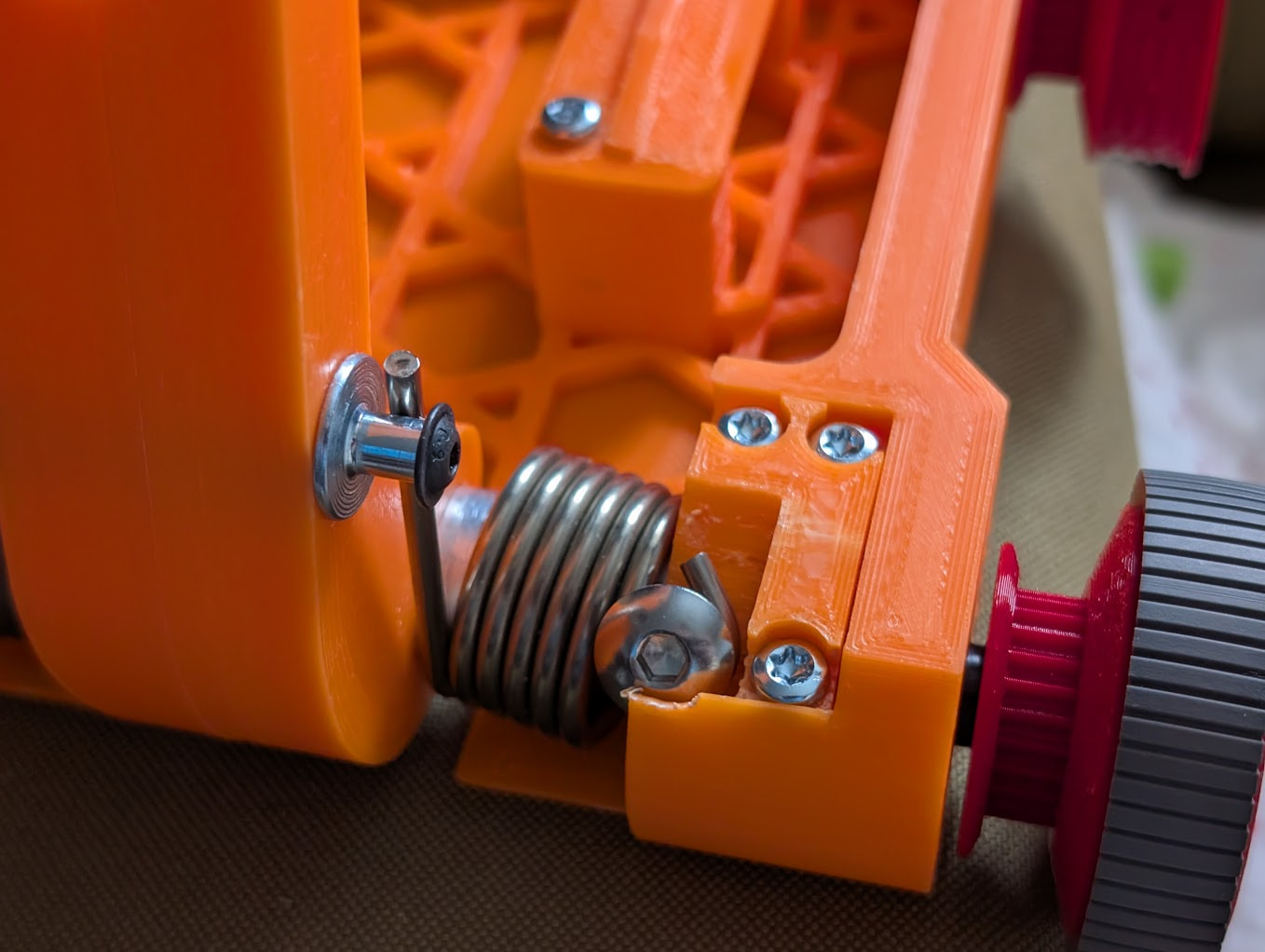
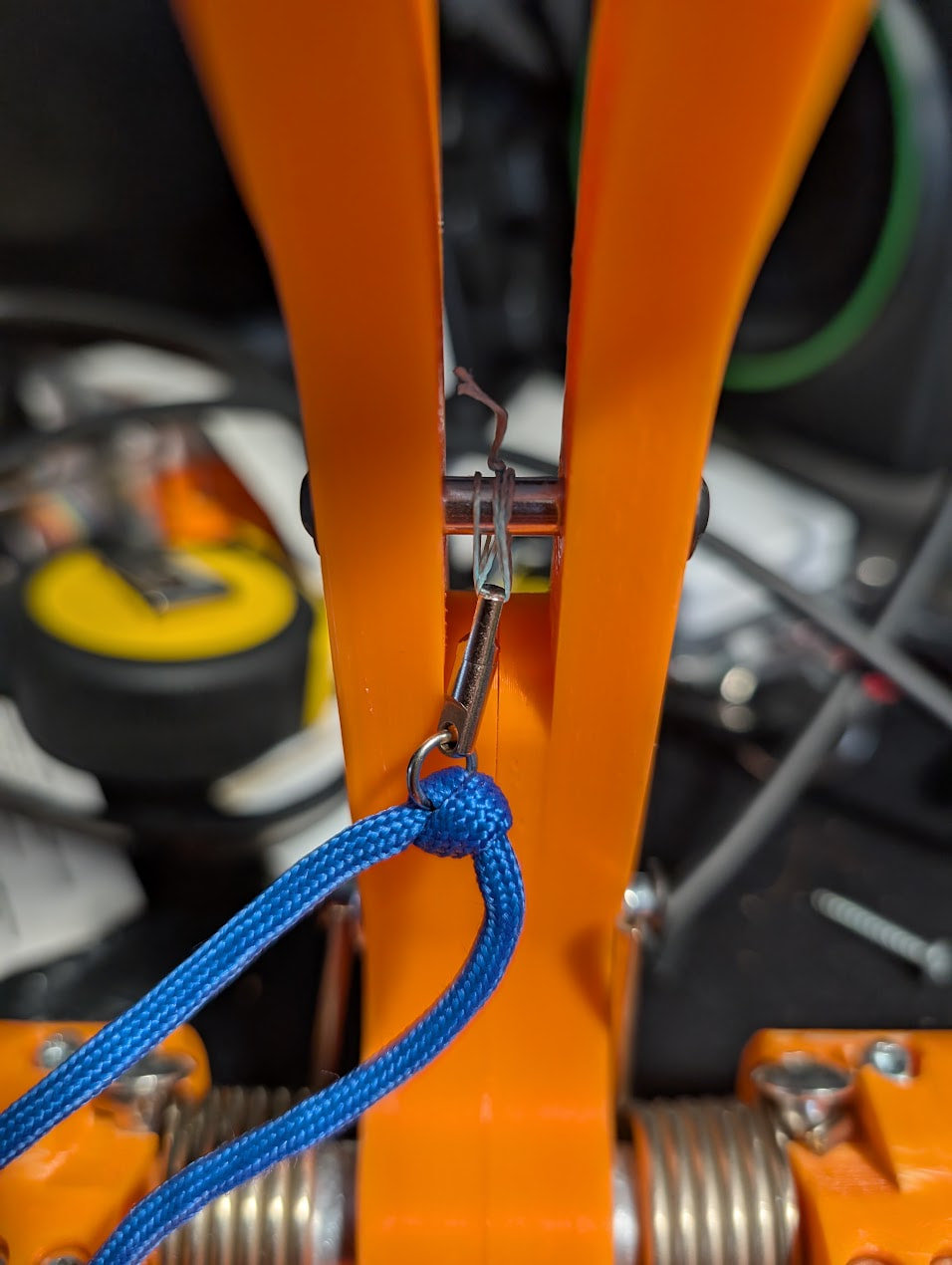
Here’s the early test jig; I’ve got some cheap light tension springs pulling some paracord tight on a pulley that’s mounted to a 9imod 70KG servo. And a video of it releasing: