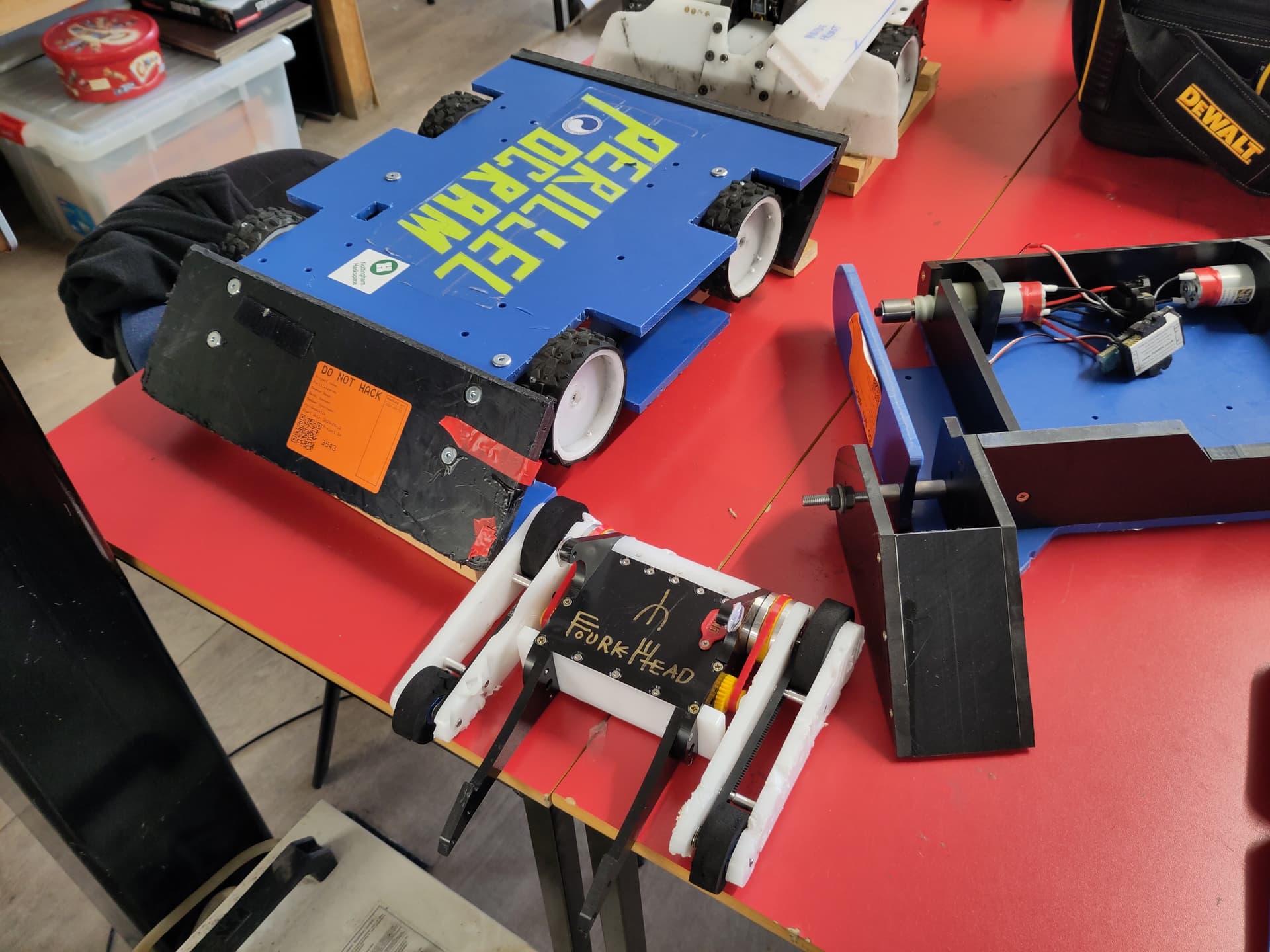
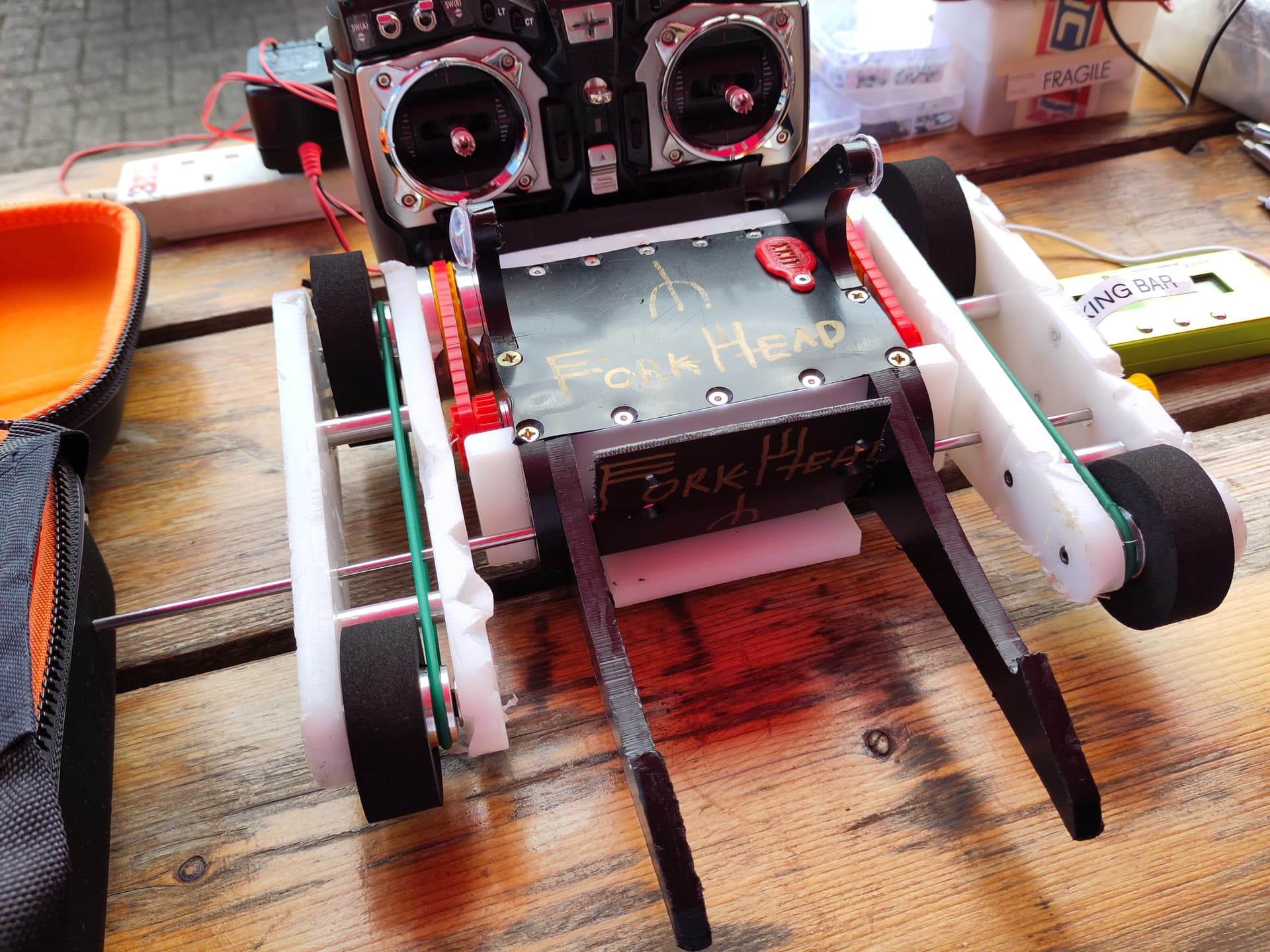
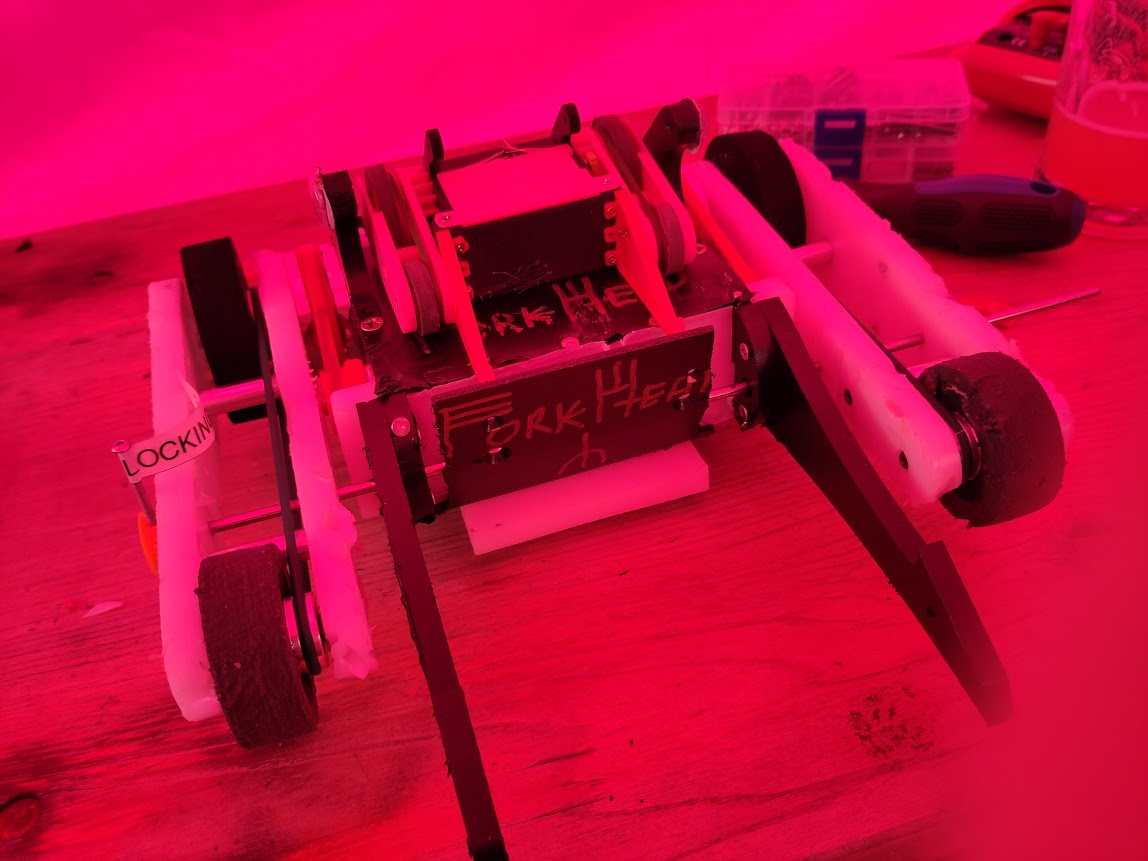
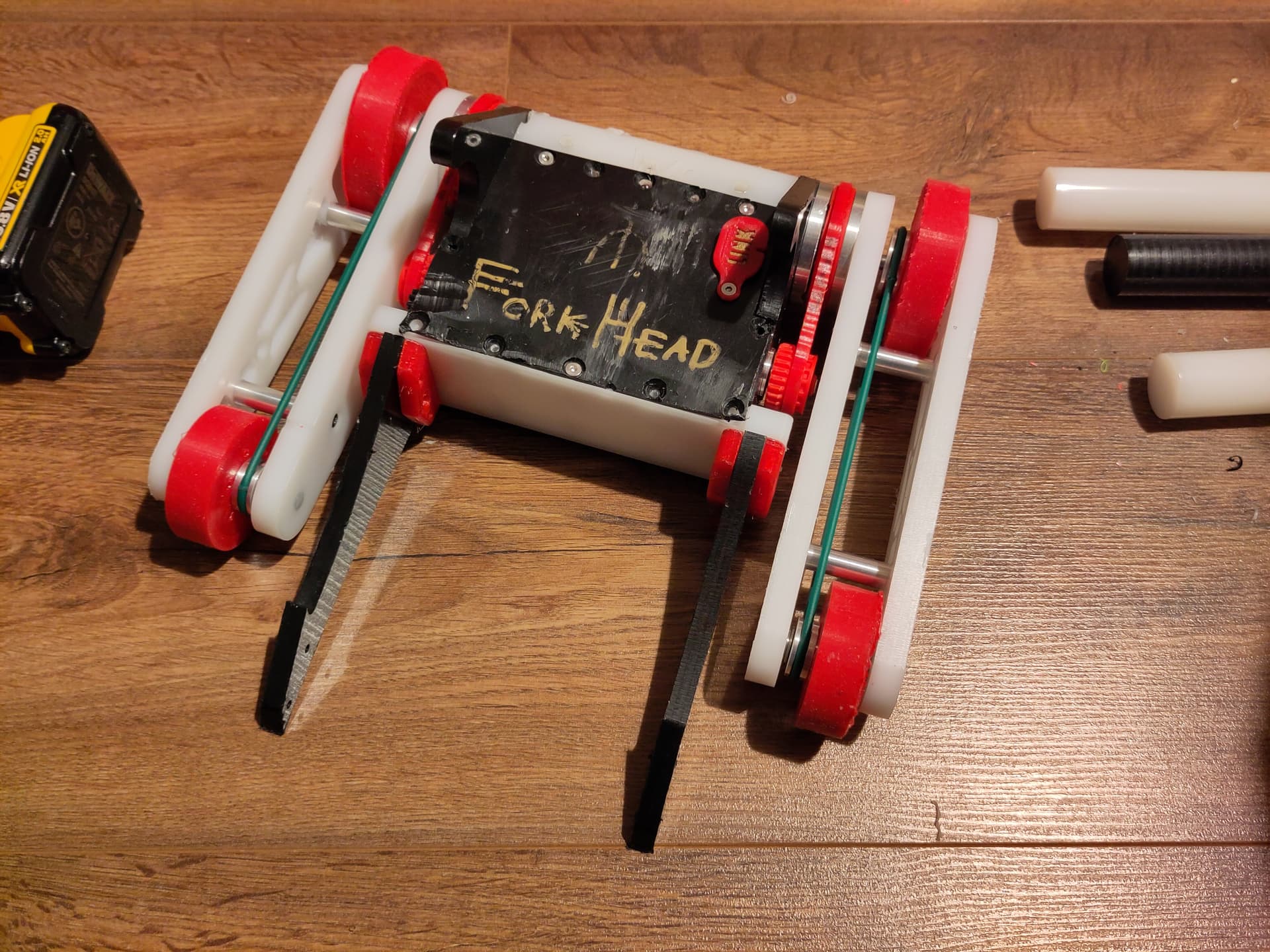
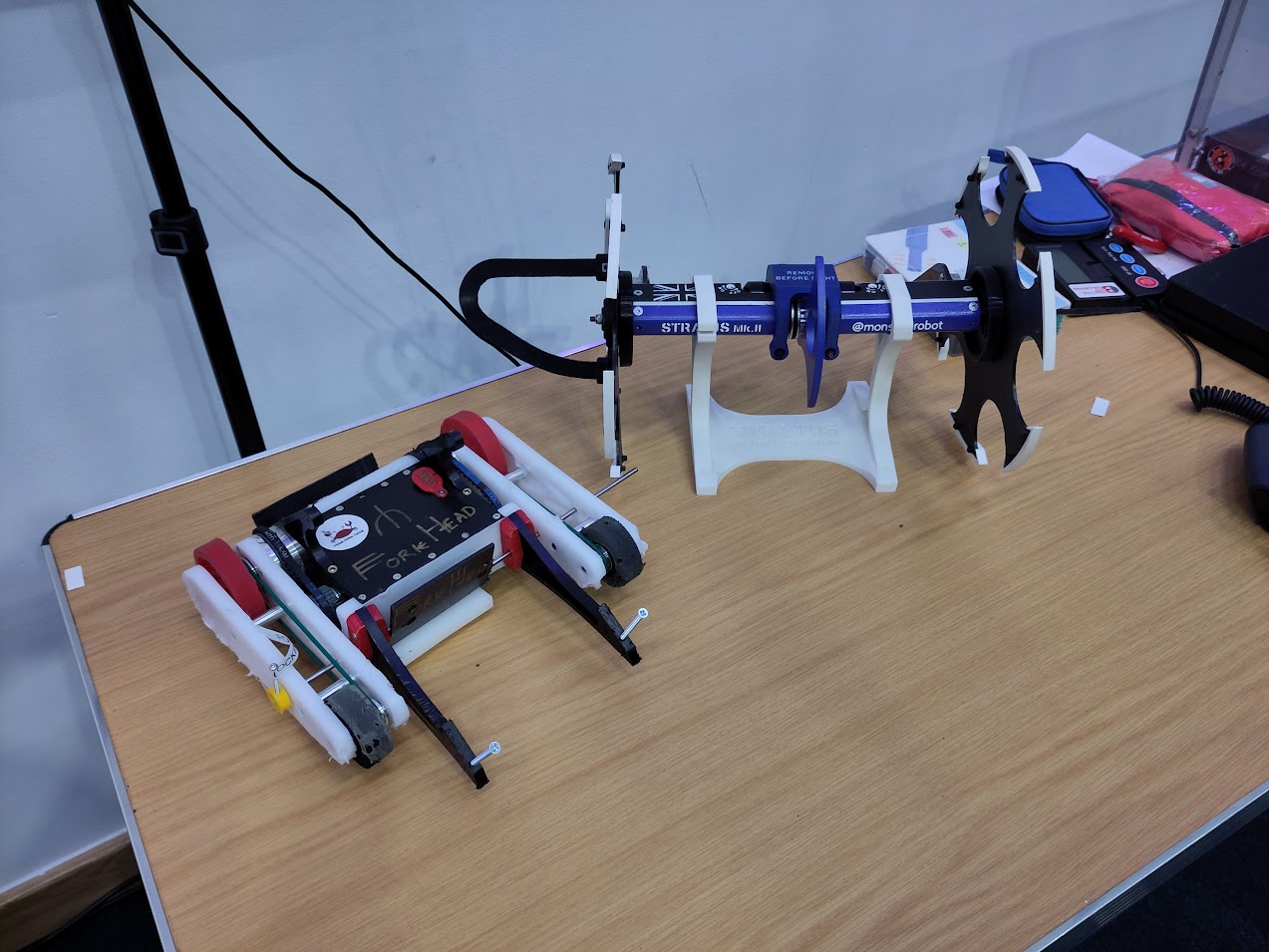
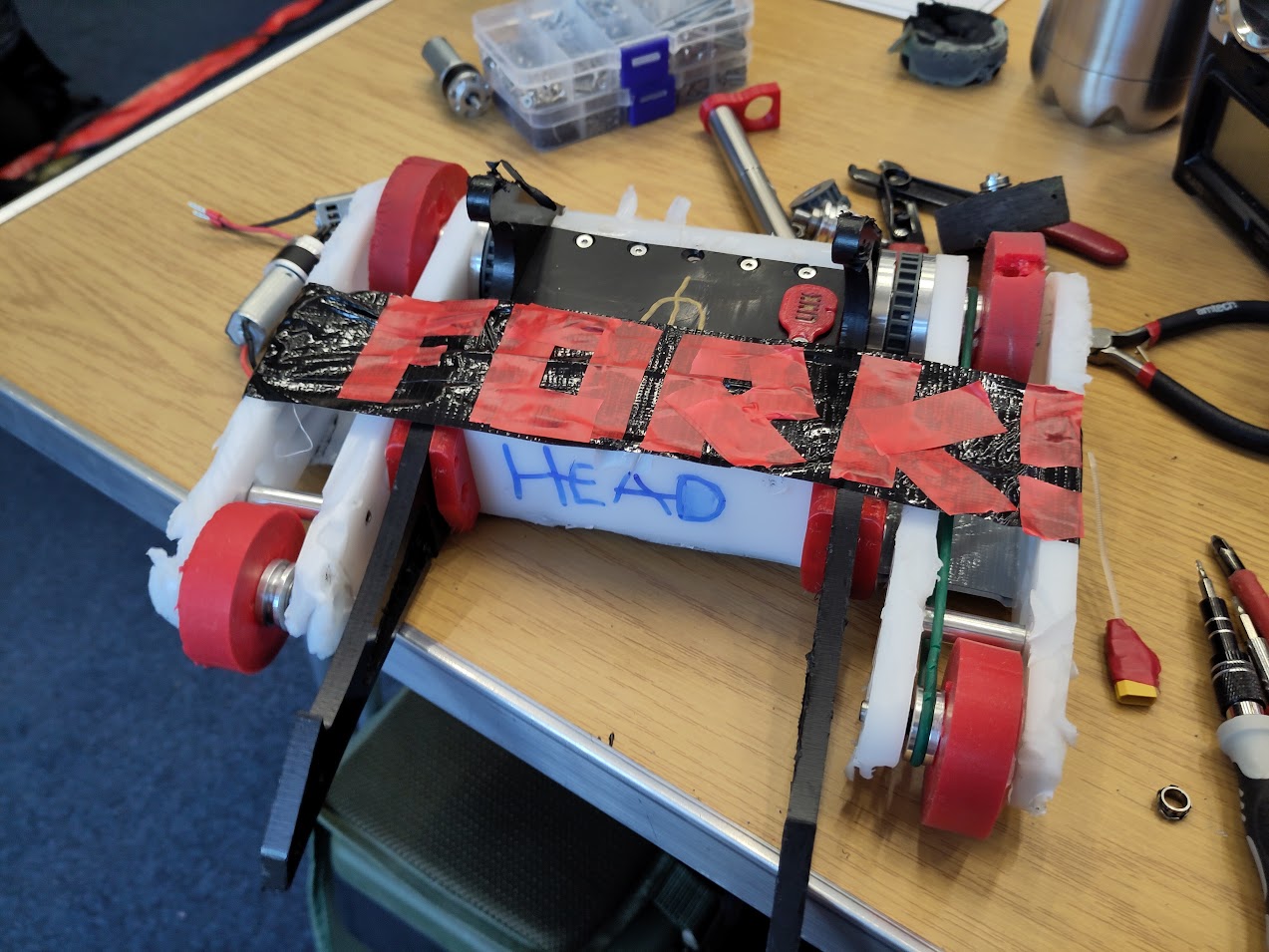
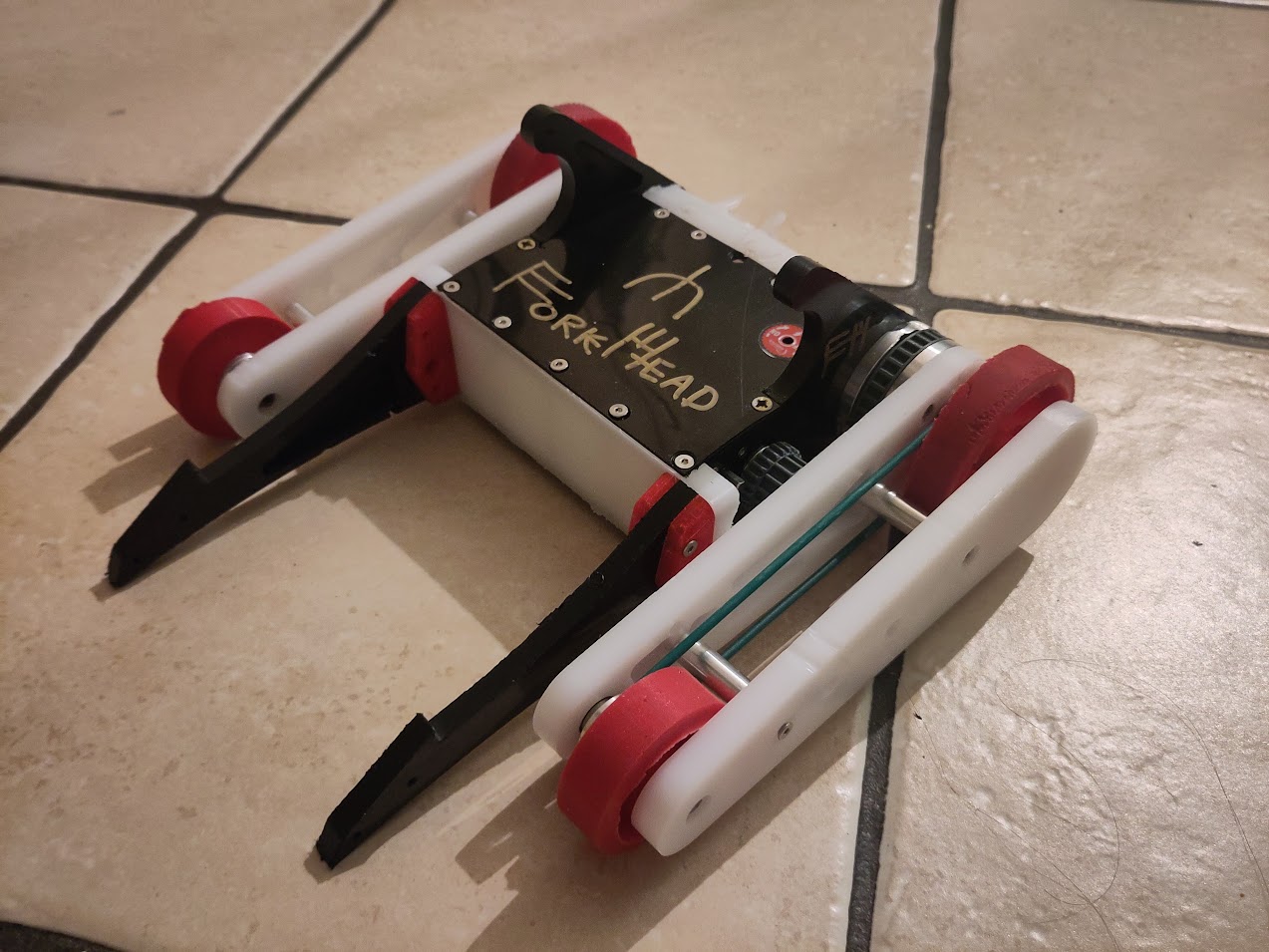
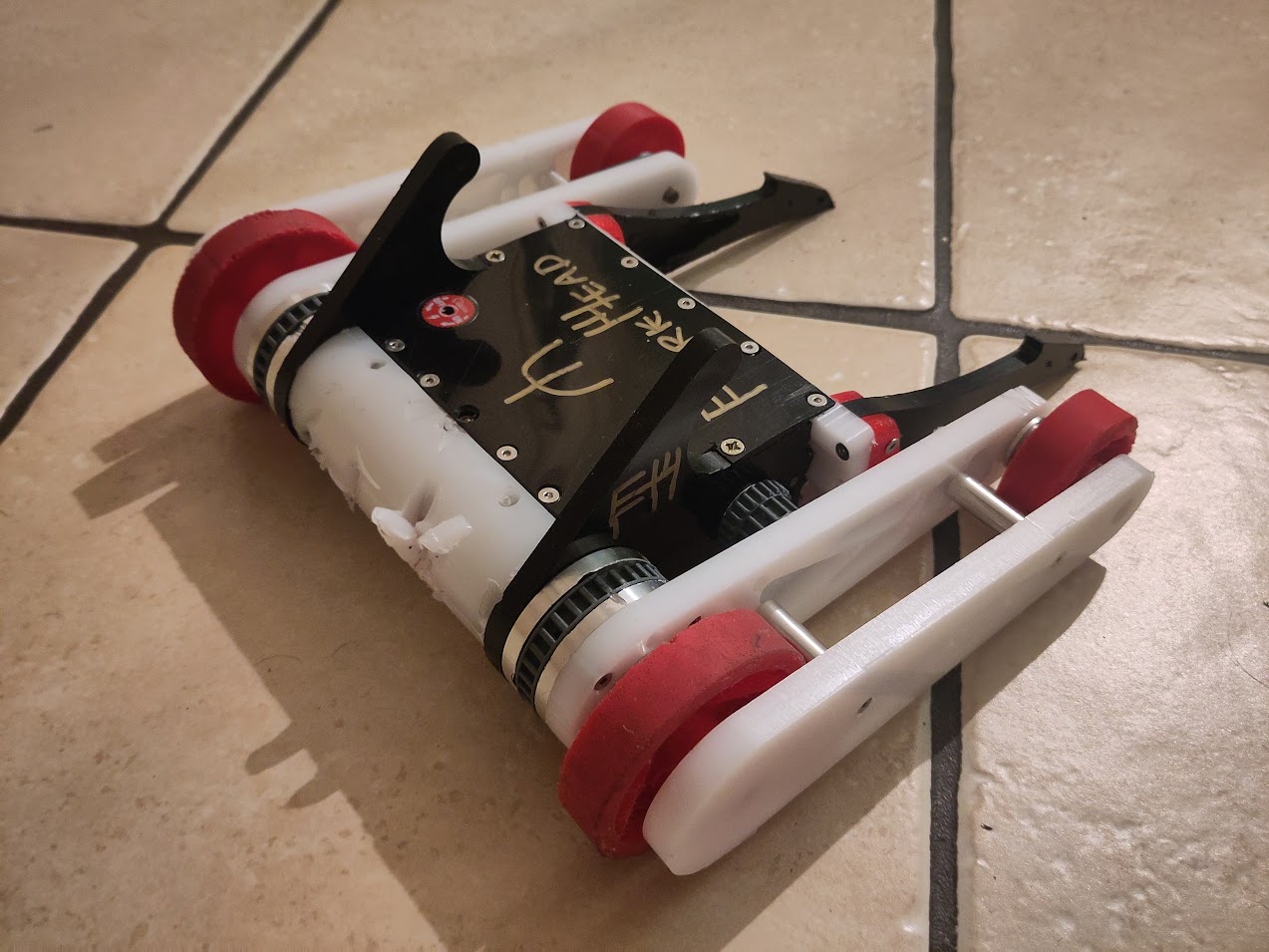
ForkHead drew a brutal lineup at SCEETLES 2, but it will be back.
The first fight was against Qry About It, a wide 2WD vertical spinner. The first engagement seemed to go well with the prongs finding their way under QAI, until the disc made contact with (I think) the left prong. This ripped both TPU fork mounts off of the prongs leaving me with the damaged bare prongs for the rest of the fight.
The bot kept going but unfortunately I was too slow in self righting, resulting in taking another hit while trying to get away. This second hit left the drive pods out of phase with each other for a while. As the fight continued it weathered a bunch more hits but didn’t managed to get under Qry About It again.
Later on and missing the end of one prong and the belt that actuated one drive pod I was able to hit the pit button. In the last 30 seconds I attempted to get Qry About It between the drive pods and push it towards the pit, but the combination of Qry About It’s sticky tires and the rounded rear armour on ForkHead meant this didn’t happen.
The fight went to a judge’s decision which deservedly went to Qry About It.
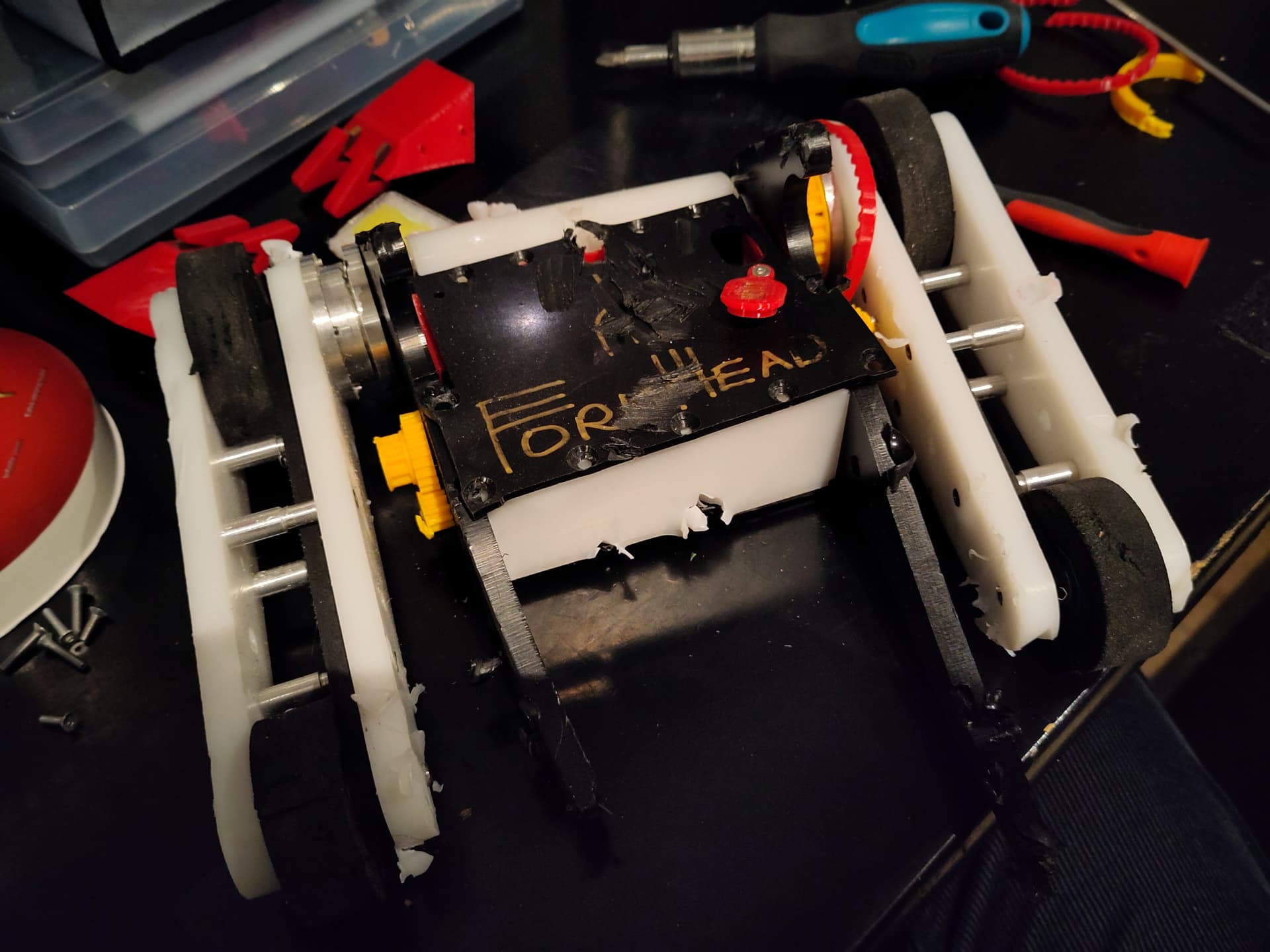
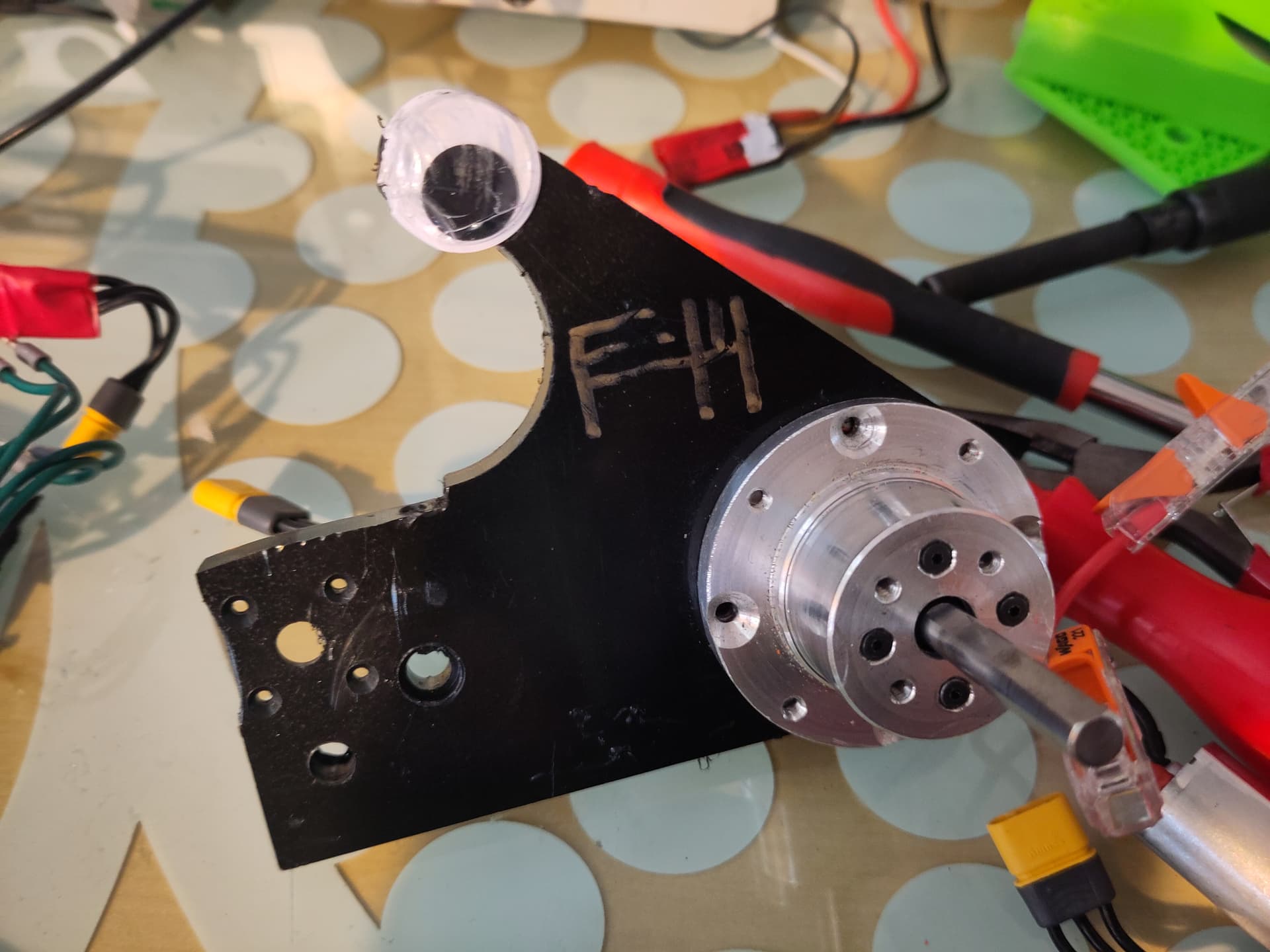
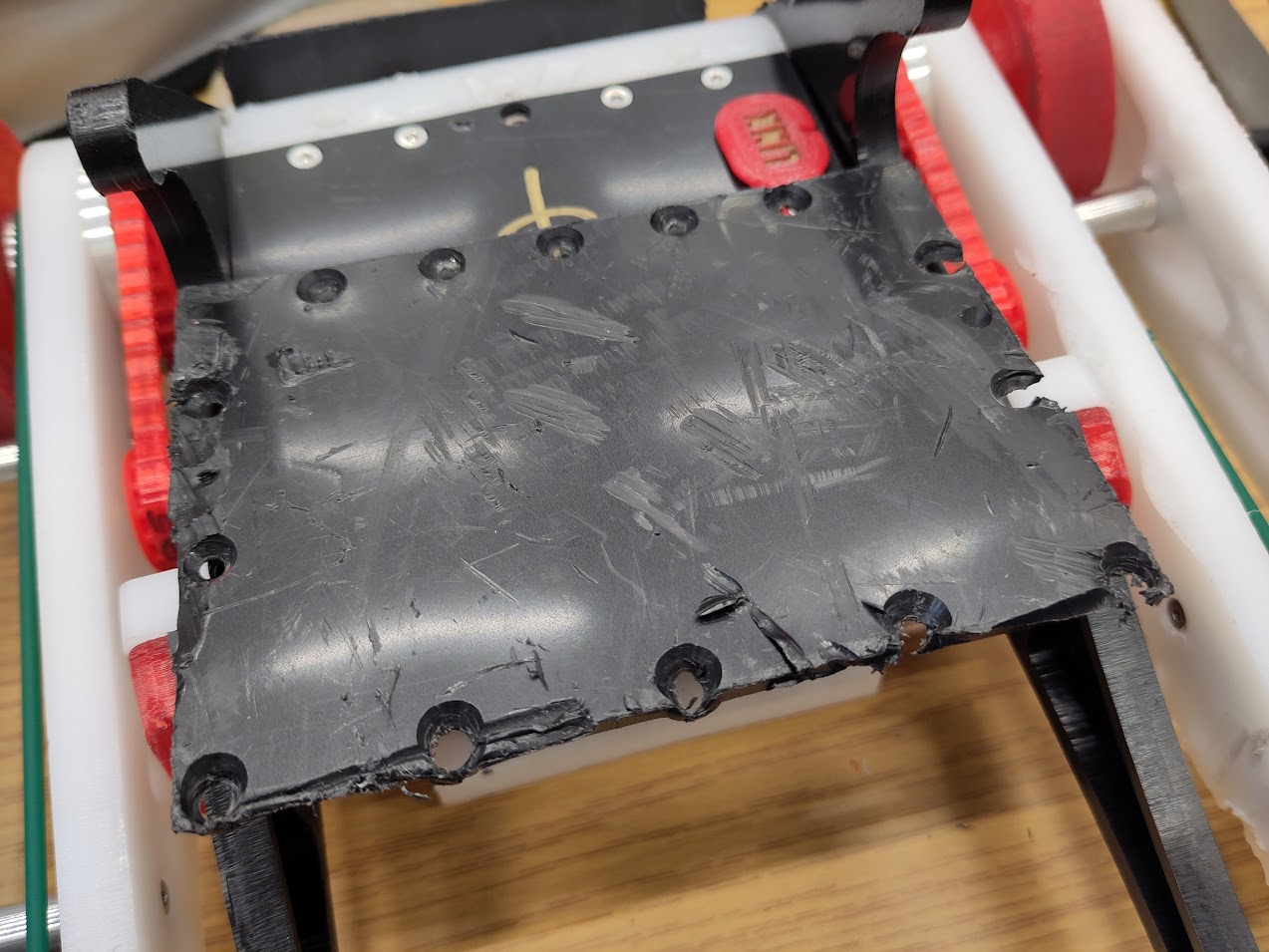
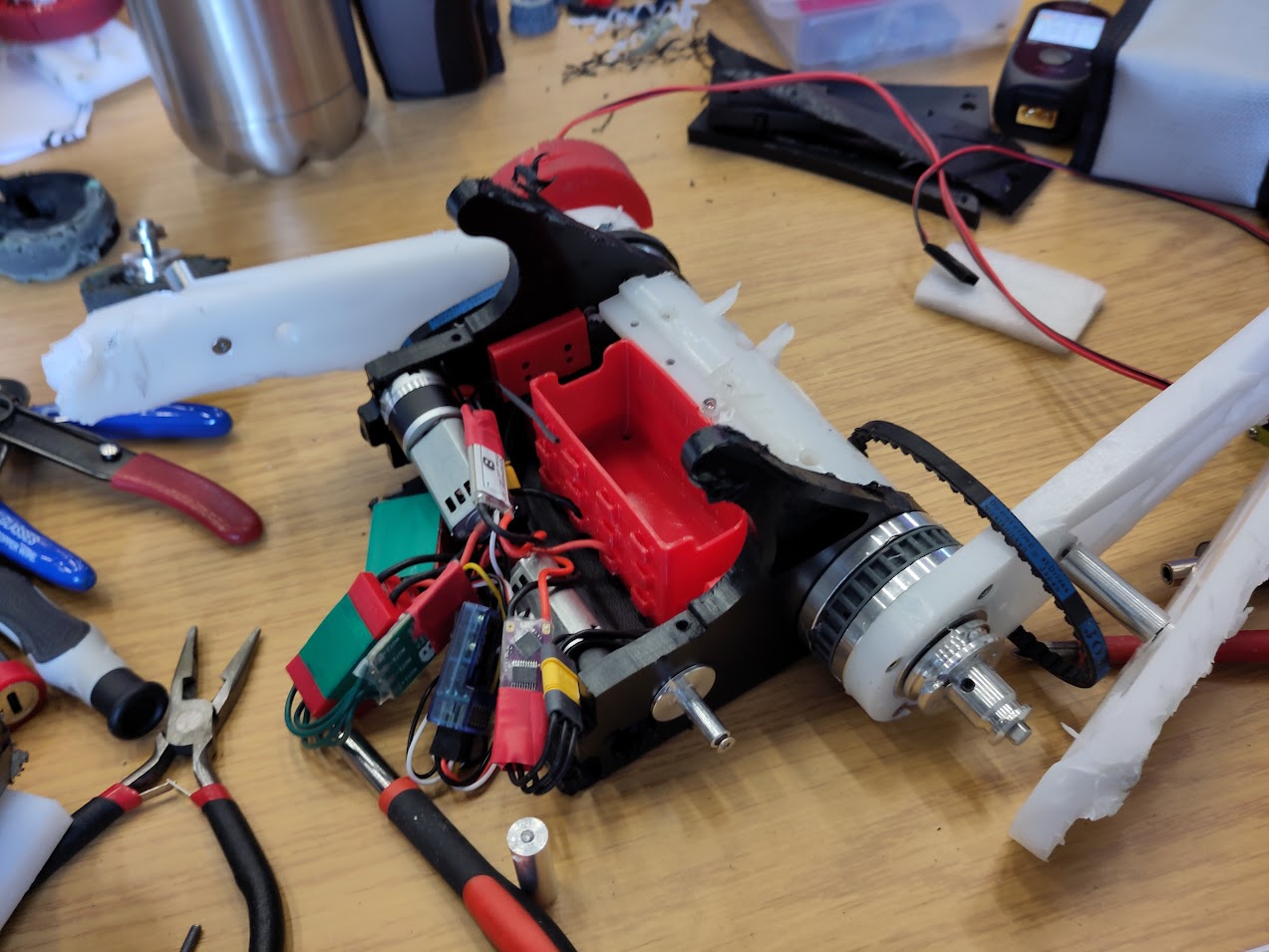
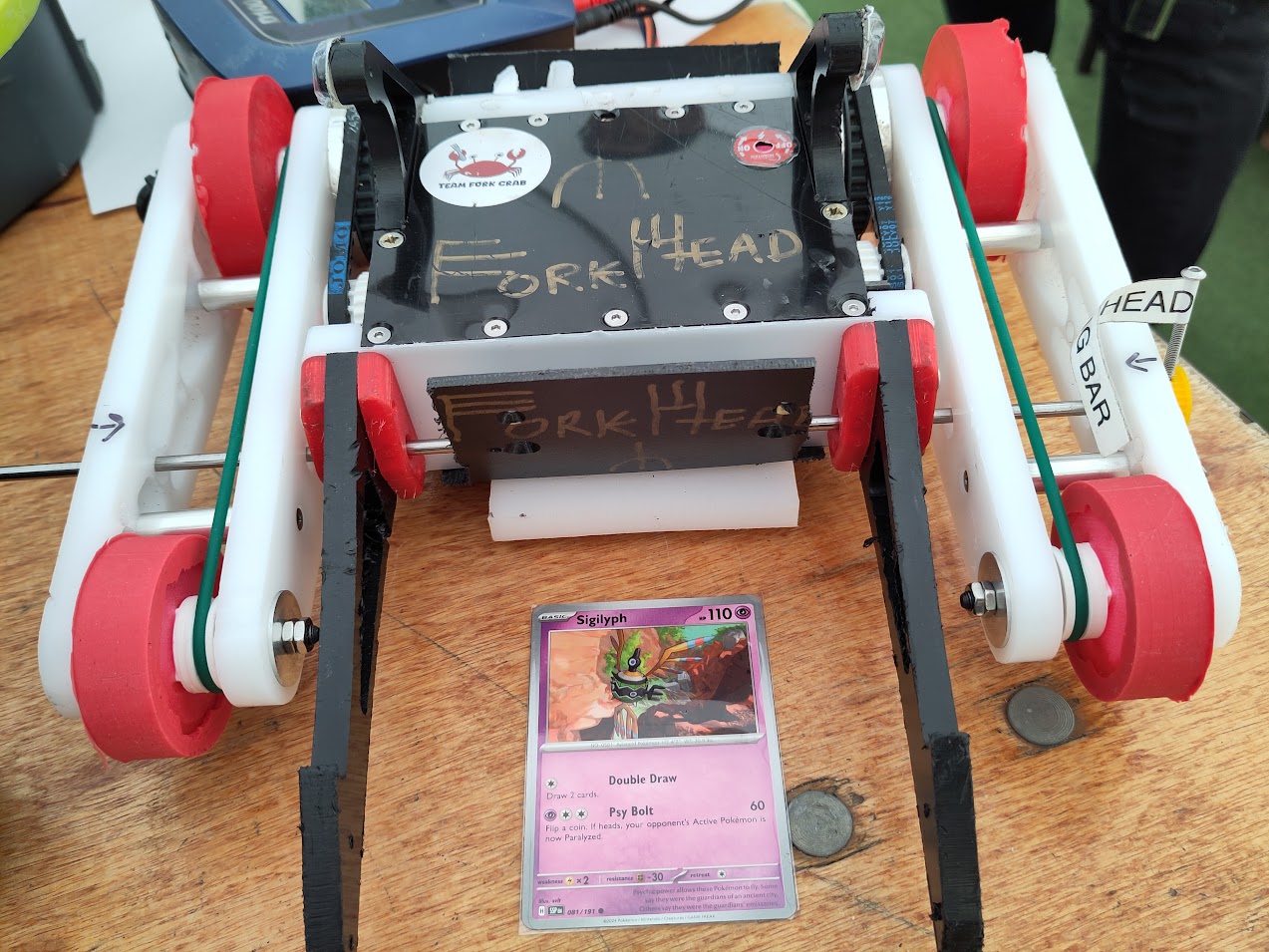
Apart from the prongs, one of which was torn off and one of which was mangled, and some bent screws, most of the damage was cosmetic and I’m pleased with ForkHead’s ability to take a hit. Unfortunately the drive mechanism that rotates the drive pods is quite exposed, and the countershaft that keeps both sides in sync took a hit and became bent.
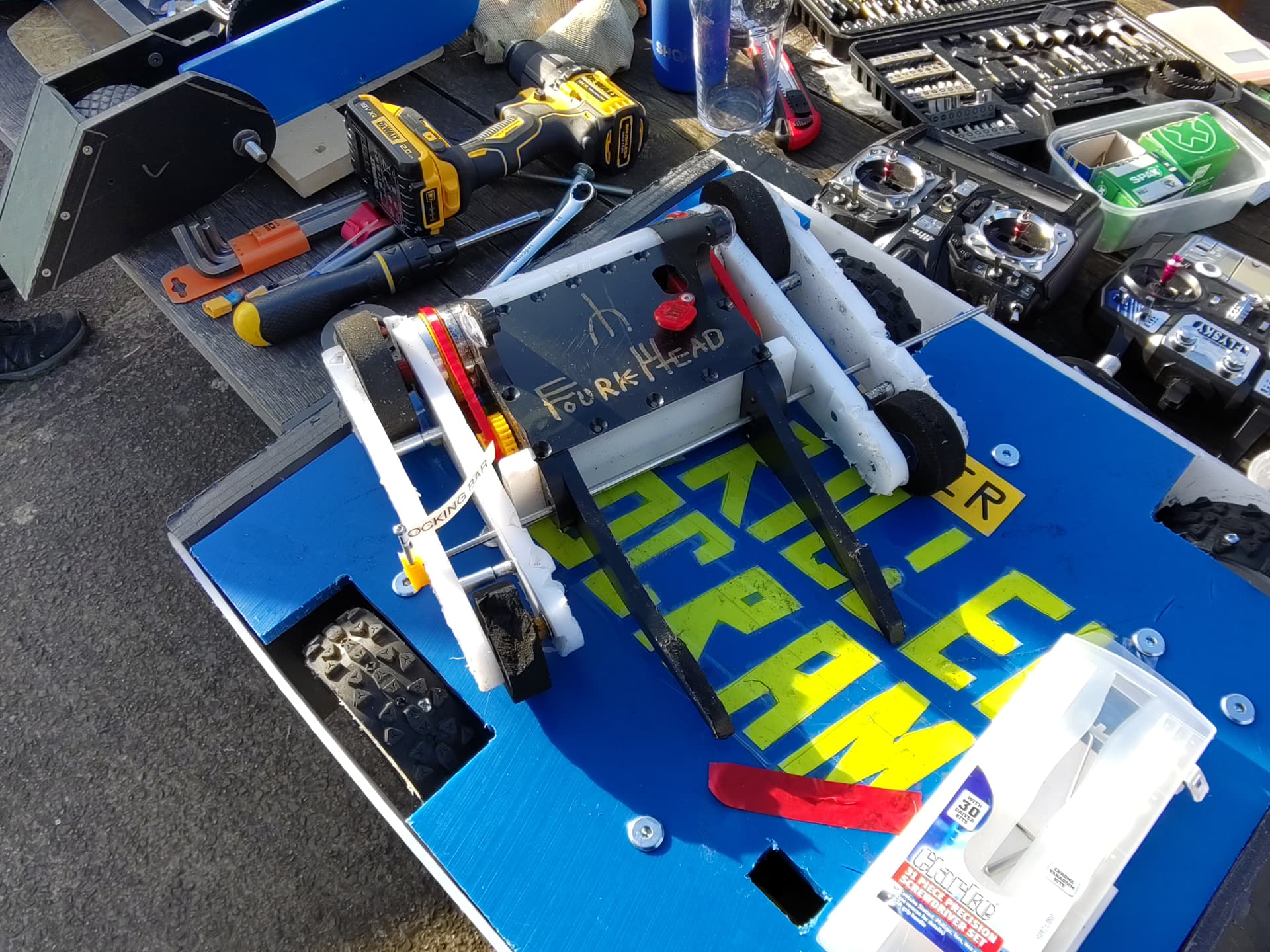
I spent the next hour or stripping the bot down to replace this shaft before finding that my spare countershaft was the wrong length. Having pushed my next fight back twice due to the amount of work needed to get at this component I had to settle for putting ForkHead into its next fight against BadFutherMucker with the countershaft removed and the drive pods spinning loose. I added some TPU armour to try and protect the remaining pod drive bits, but this ended up doing basically nothing.
Thanks to the way the drive pods behave in reaction to my 4WD system this went badly. This is obvious to see before the fight while I’m trying to get into a ‘both drive pods pointing backwards’ situation.
I managed to avoid taking a hit from BFM for the first 15 seconds or so of the fight, before getting thrown around quite a bit (and taking out a light).
I had to tap at 50 seconds because I had line of sight to ForkHead’s battery, and I suspect I also had no drive at that point.

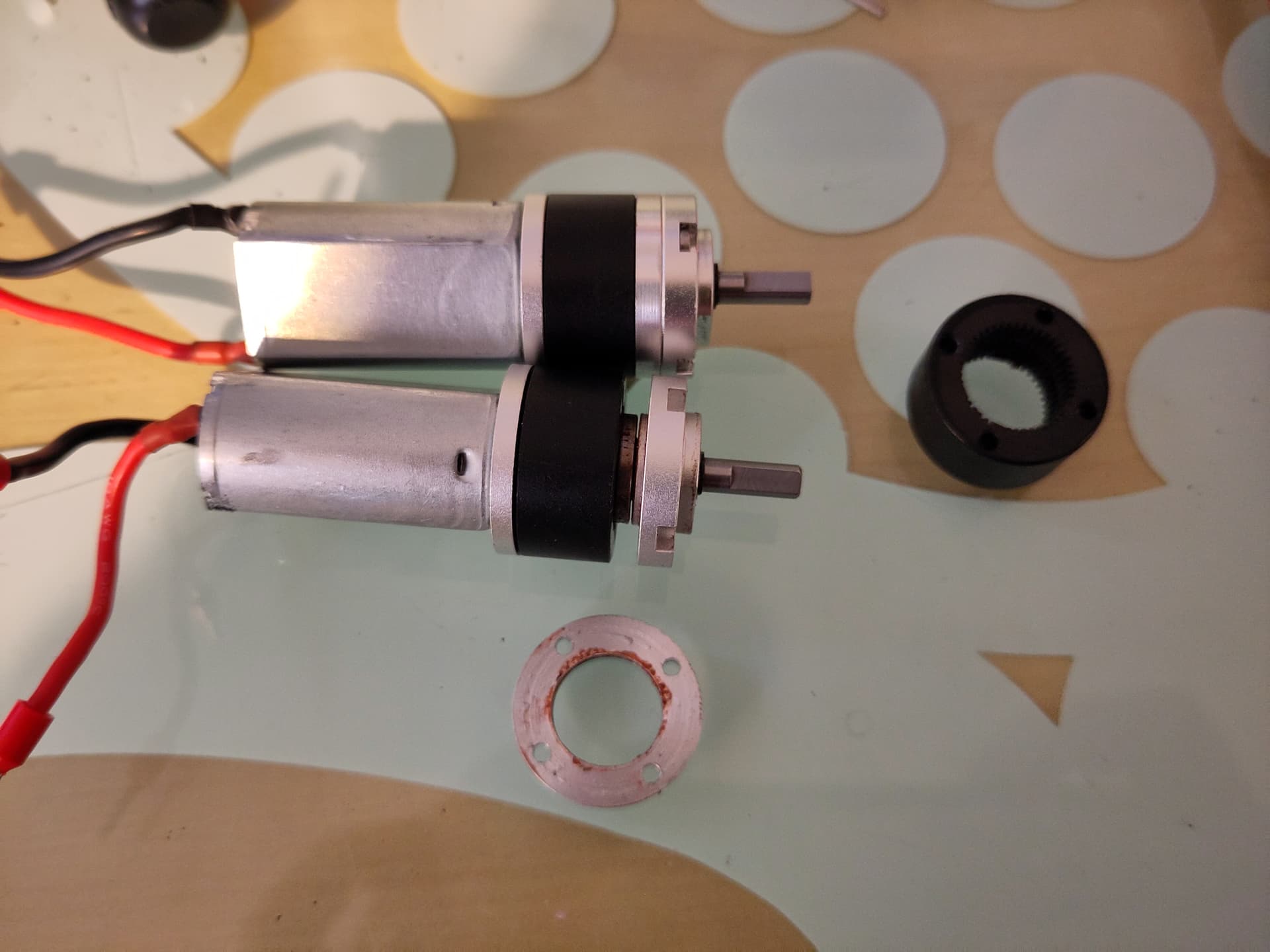
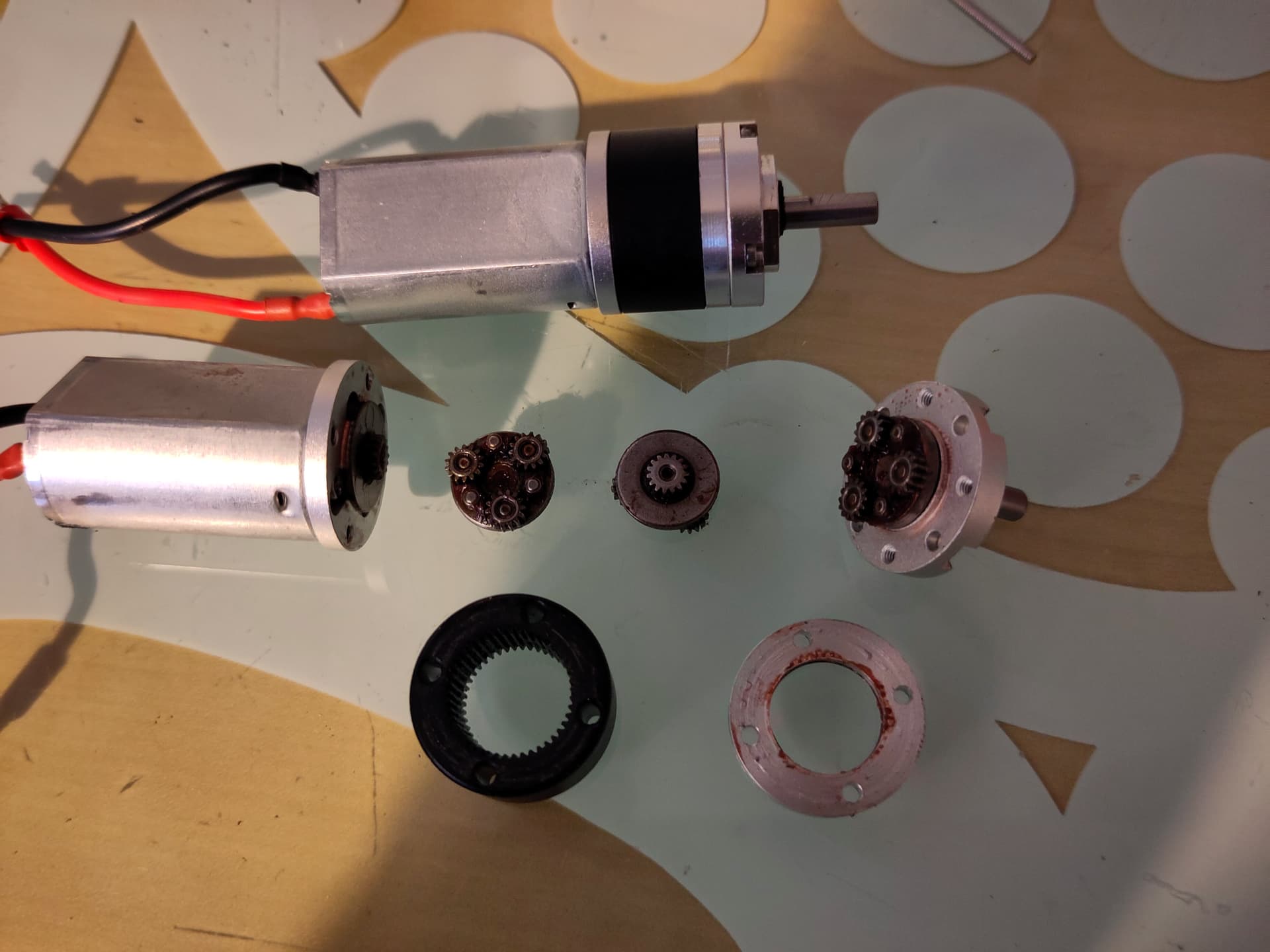
ForkHead was looking very unhappy after this fight. Hits to the drive pod had broken the aluminium standoffs between the sides of the drive pod (or the screws holding them) which had released the captive front axle. Having these act as shaft support for the drive motors was I think a bad idea, as the remaining standoffs just acted as a force multiplier sending further impacts on the outer drive pods straight into the motor shafts.
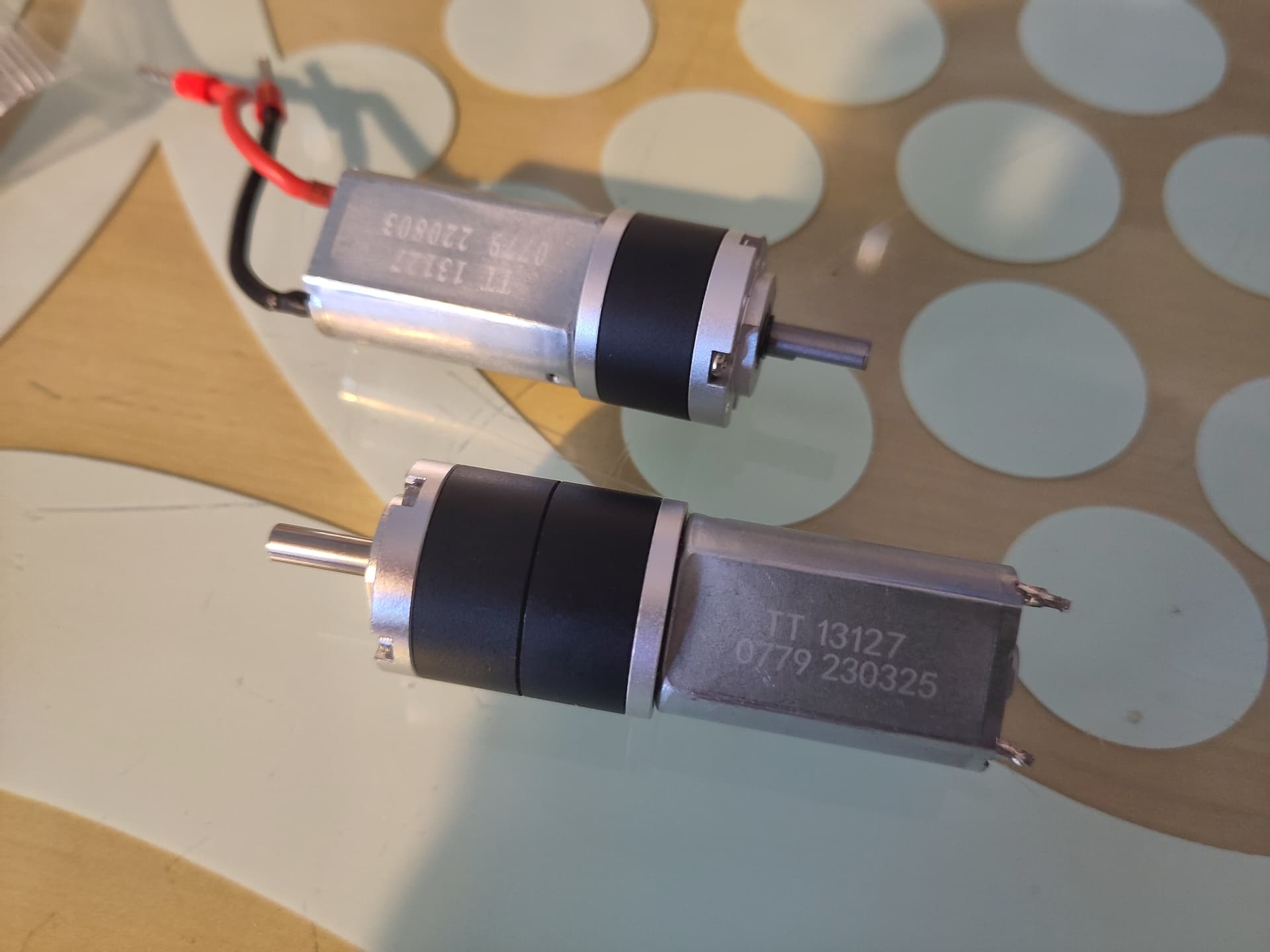
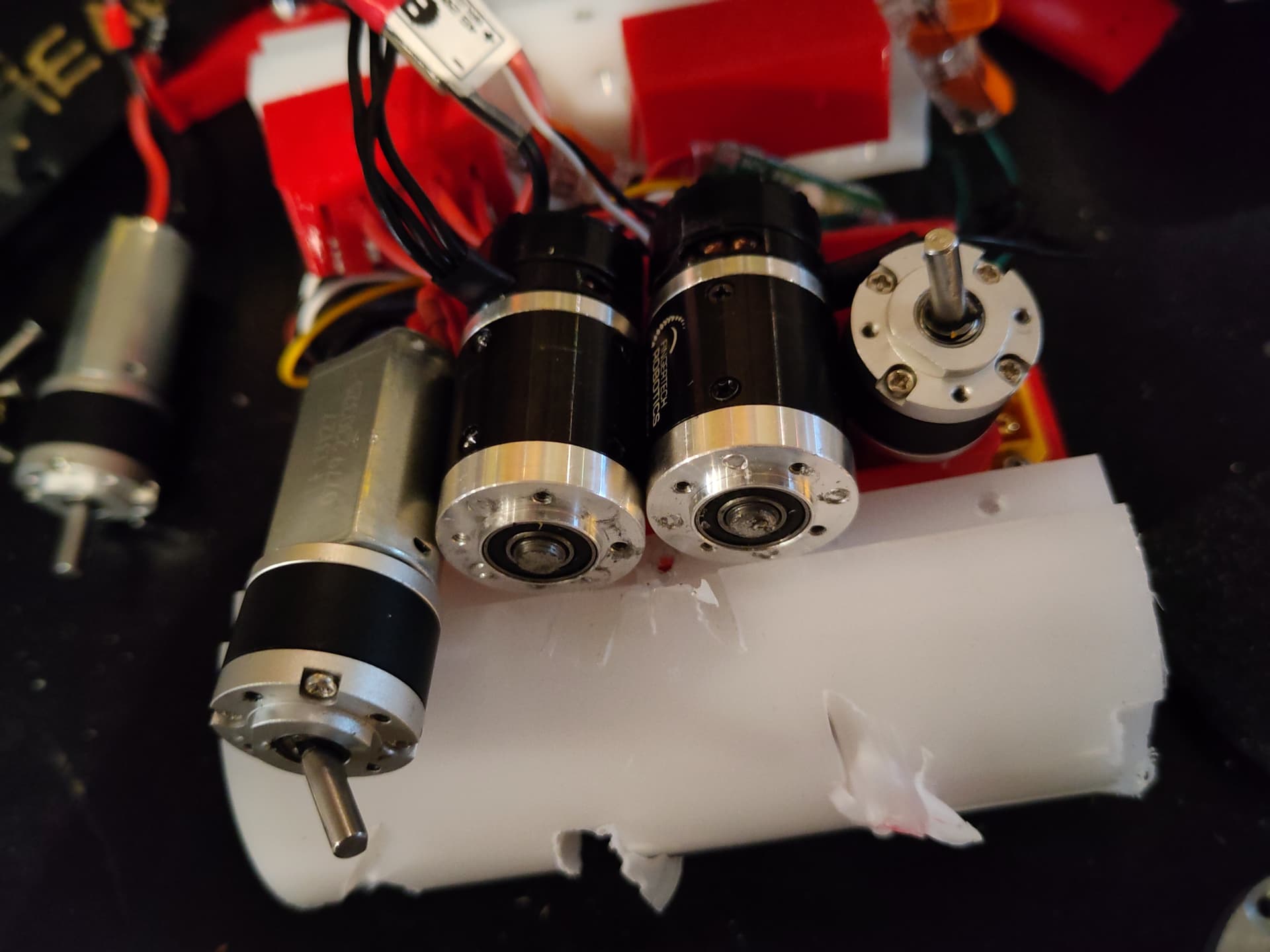
The core of the bot was still pretty much intact (after replacing/tightening screws) but with two MegaSpark motor shafts sheared and both 22mm drive pod rotation motor shafts bent I decided to forfeit the third fight (which would have been against another vertical spinner, Ultra Violence) as it would have taken a long time to strip down and rebuild the robot to replace the drive motors, and I didn’t want to sacrifice another pair of MegaSparks without making some improvements.
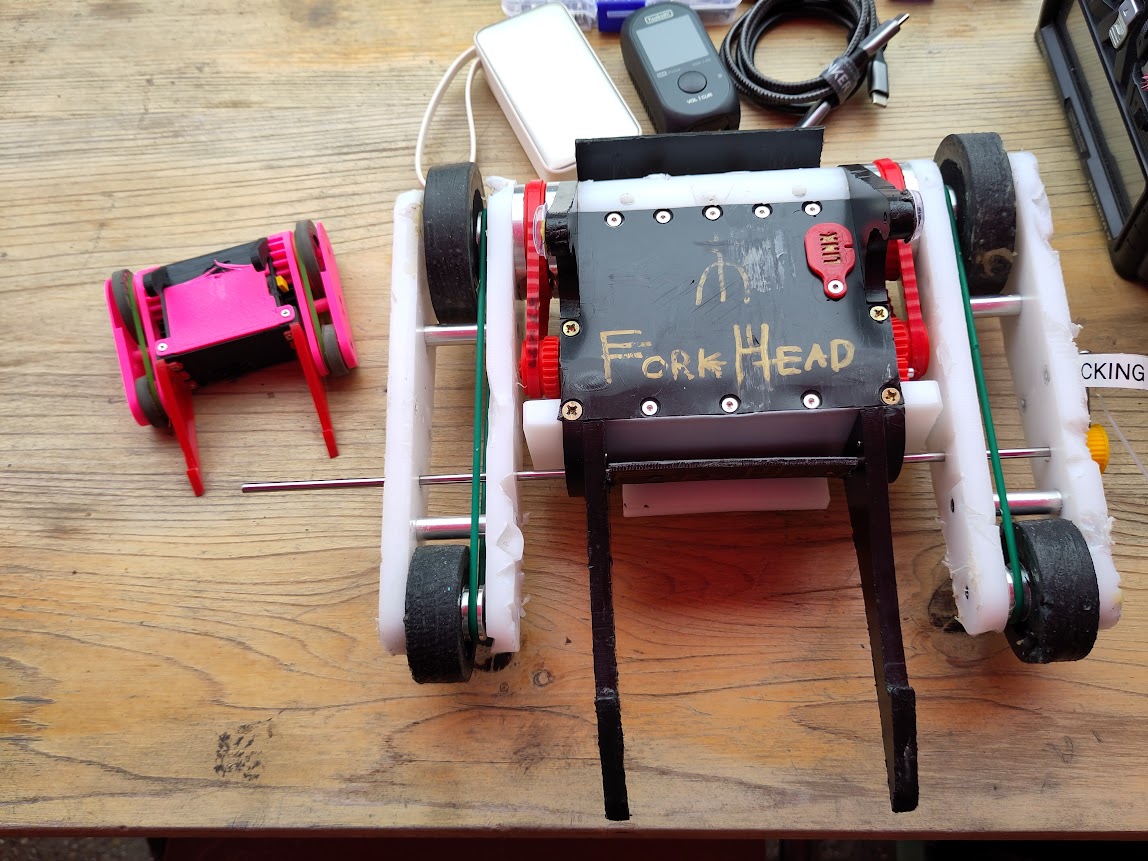
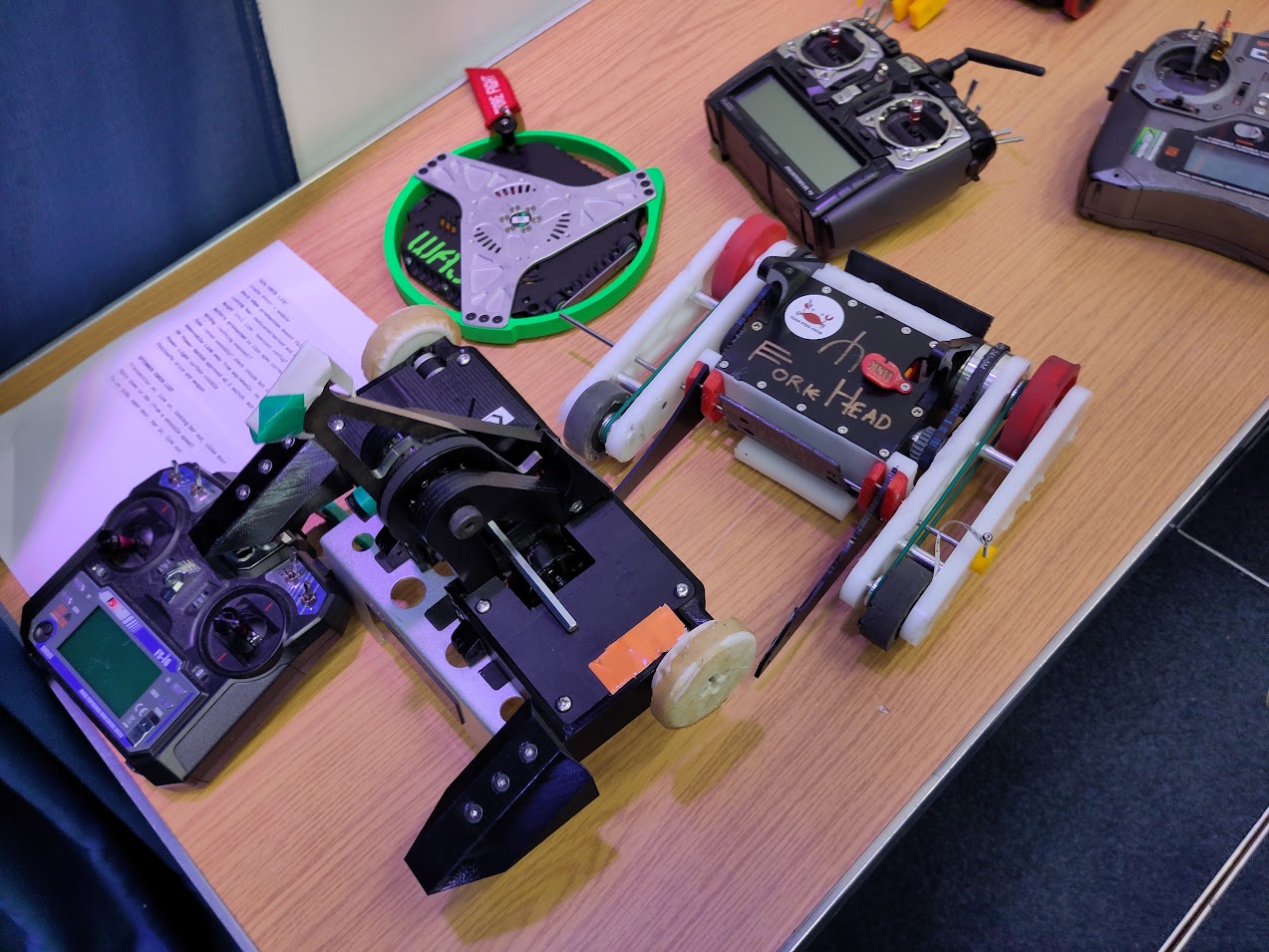
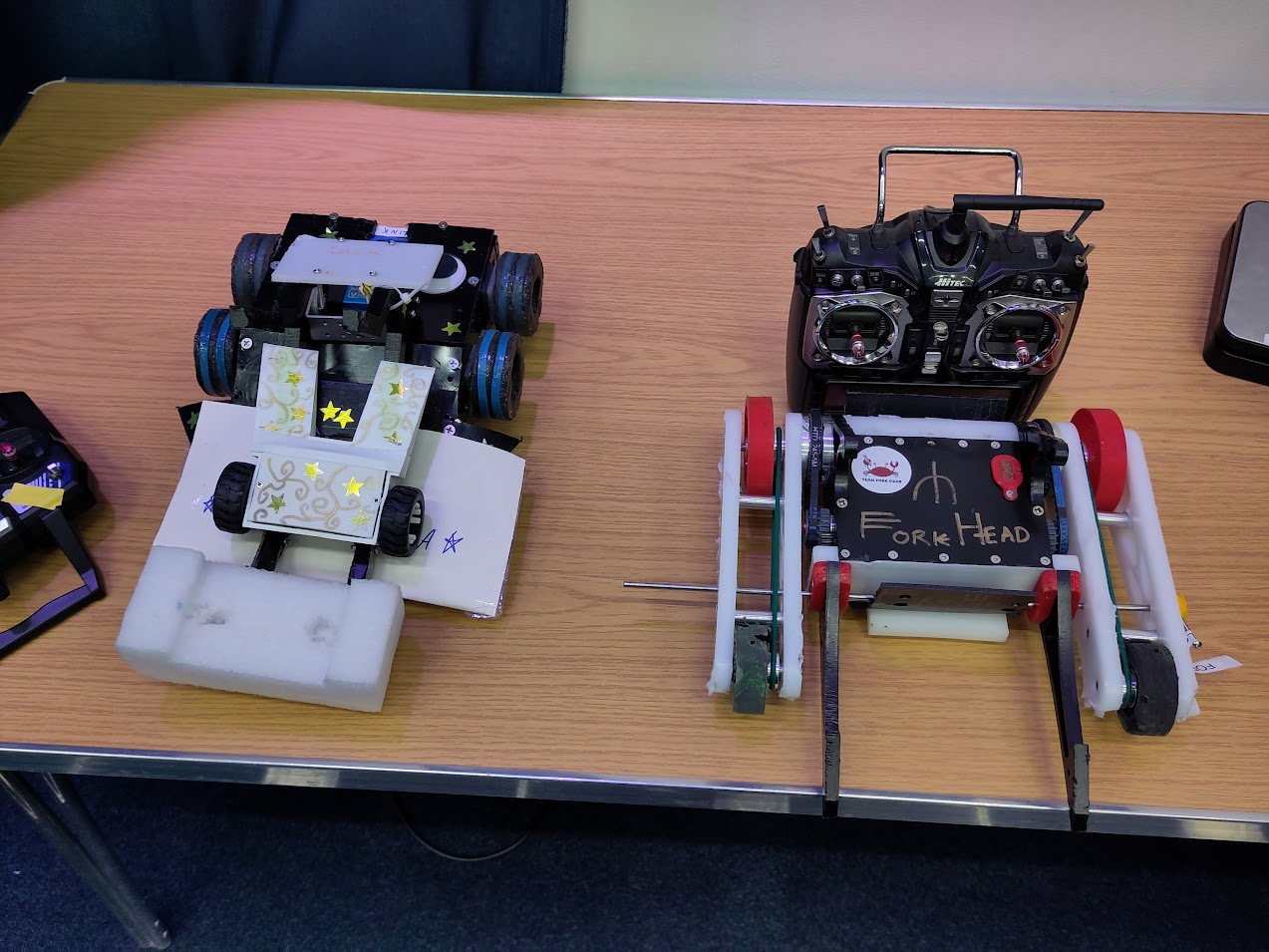
Despite coming home in pieces ForkHead took home a banana for scale tropy for Best Design and on balance it performed well enough that I’m intending to continue developing it.

Obviously I’ve got a long list of improvements to make for the next event, including:
- Armour
- Replace front armour panel with a wider piece that interlocks with the side armour
- This should transfer impact forces straight to the side panels instead bending screws and ripping off the top/bottom armour
- Wider panel keeps attacks from the front out of the pod drive system
- Separate the prongs from the side panels
- More modularity and weapon options
- Avoids integrating something that’s likely to take damage (prongs) with something that’s hard to replace (side panels that everything screws to)
- Think properly about forks and setups
- Replace front armour panel with a wider piece that interlocks with the side armour
- Drive Pod Control
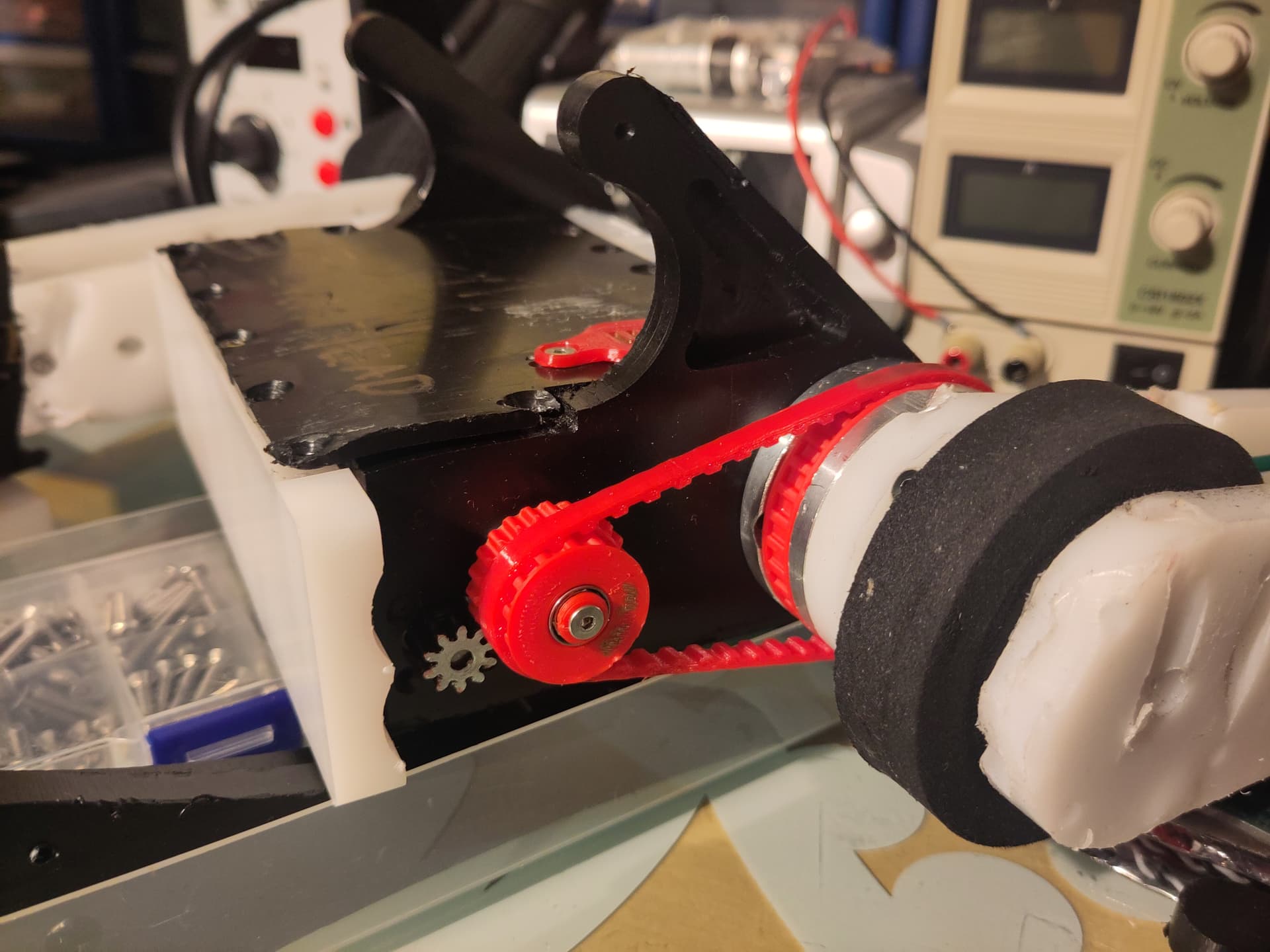
- HTD5 belts worked well
- Additional gear reduction for the pod drive motors (I already knew this was an issue)
- Remove the ‘through body’ countershaft - it was awkward to replace and clunky
- Come up with an electrical rather than mechanical system to resynchronise the drive pods (as loathe as I am to bring custom electronics into it)
- Hopefully just an endstop switch for each side, with an RC switch in series to enable/disable them
- Drive System
- Replace outer drive pod with a thinner, non-structural armour panel
- Run the front wheels on dead shafts so the outer panel is non-critical
- Slightly shorten motor shafts and remove end support
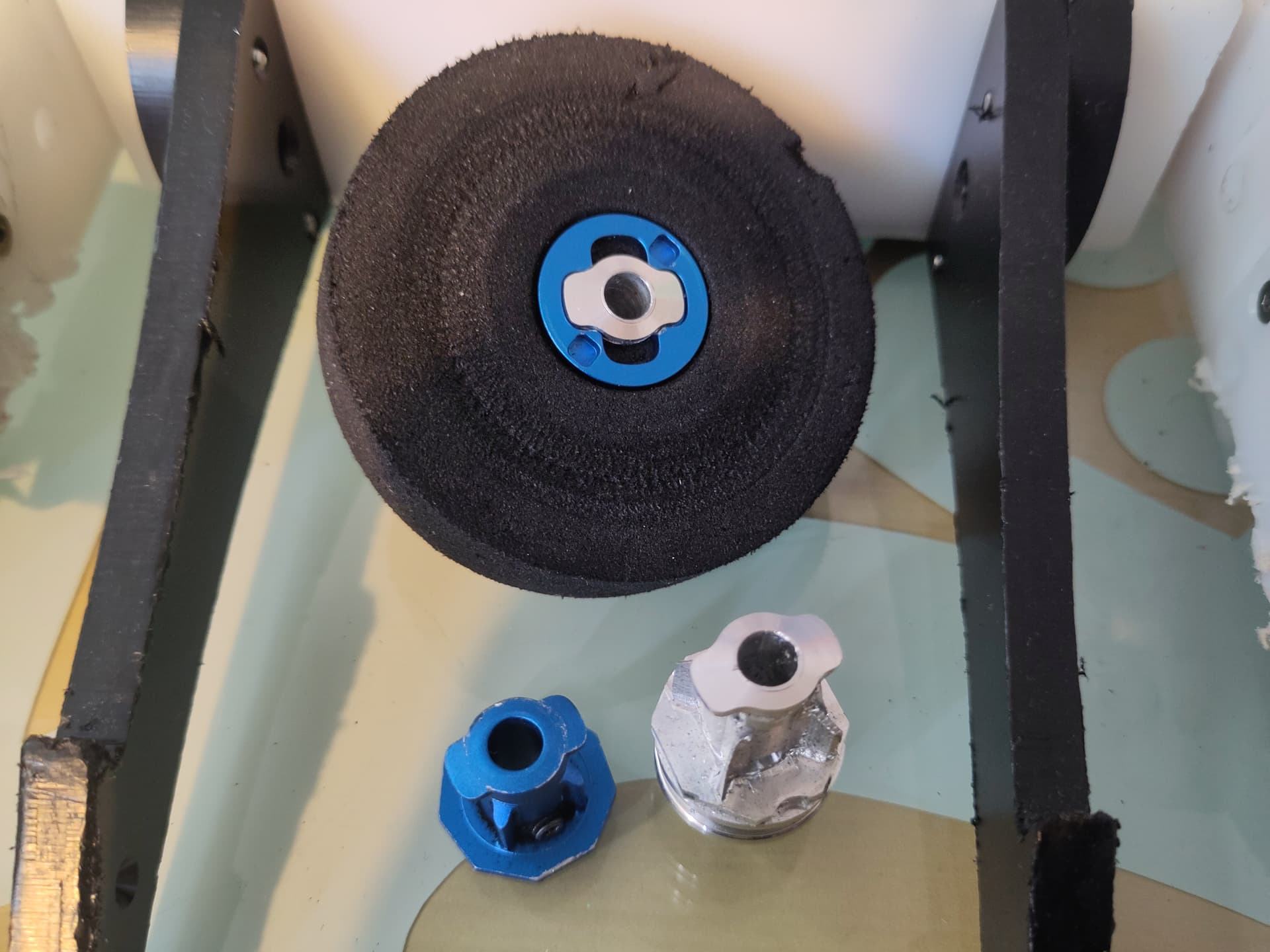
- Machine some custom hubs
- The current version is running FingerTech Hubs and 3D printed GT2 toothed pulleys press fit onto the shafts due to a lack of time. I considered adding some drive pins in holes in the hubs/gears, but I think it’s time for a custom solution.