
And just like that we have a prototype. 35mm AliExpress drone motor cut and bored with a bronze bushing (not pictured) shoved in the centre of the stator. The can has a hub which then mates up to a bearing which locates onto a lip on the stator mounting encap. That preloads and spaces the whole assembly without it being too sweaty or technical.
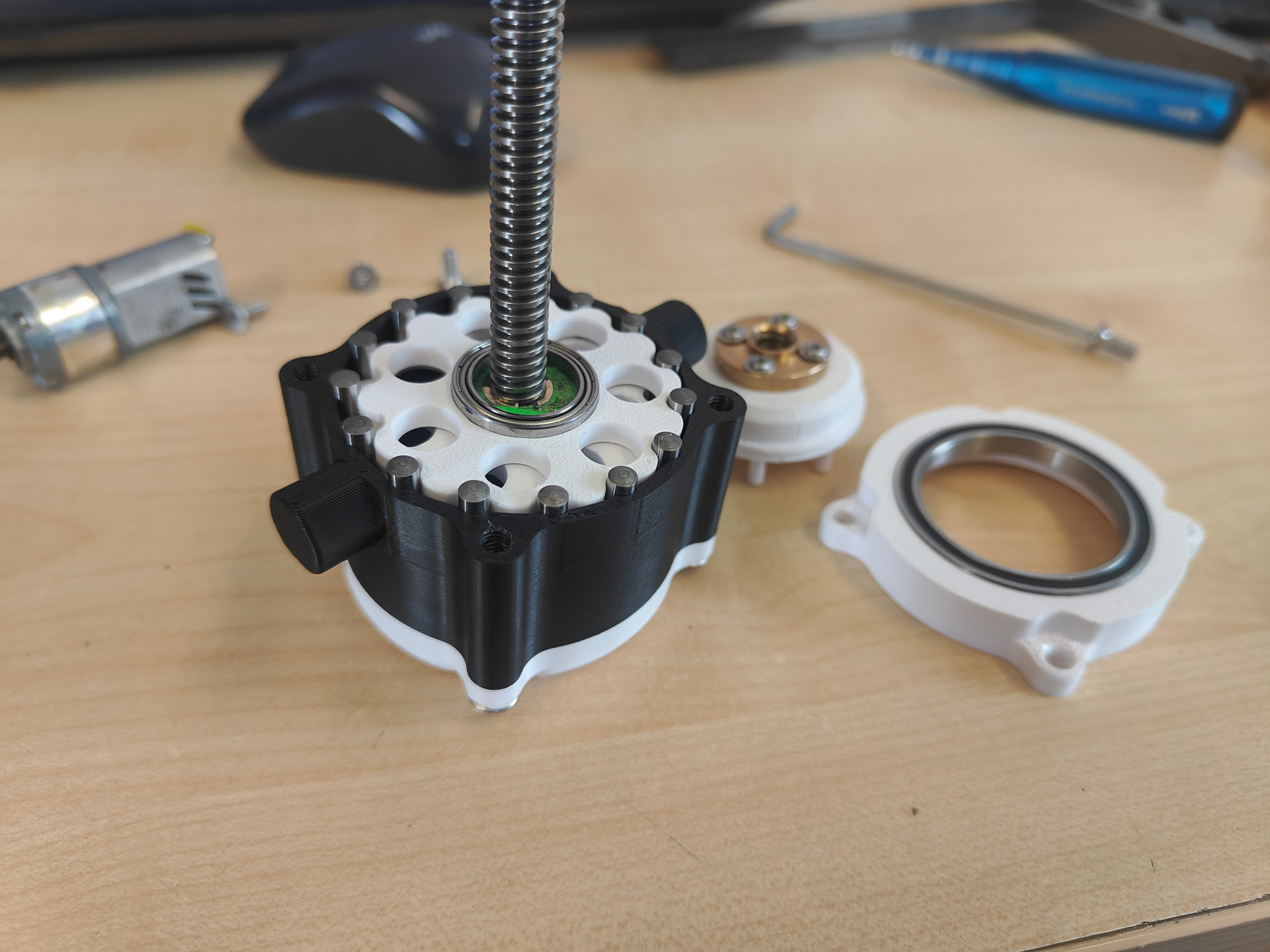
Just in case it wasn’t clear how it all goes together there are a ring o’pins which are retained by the central portion and the front end cap.
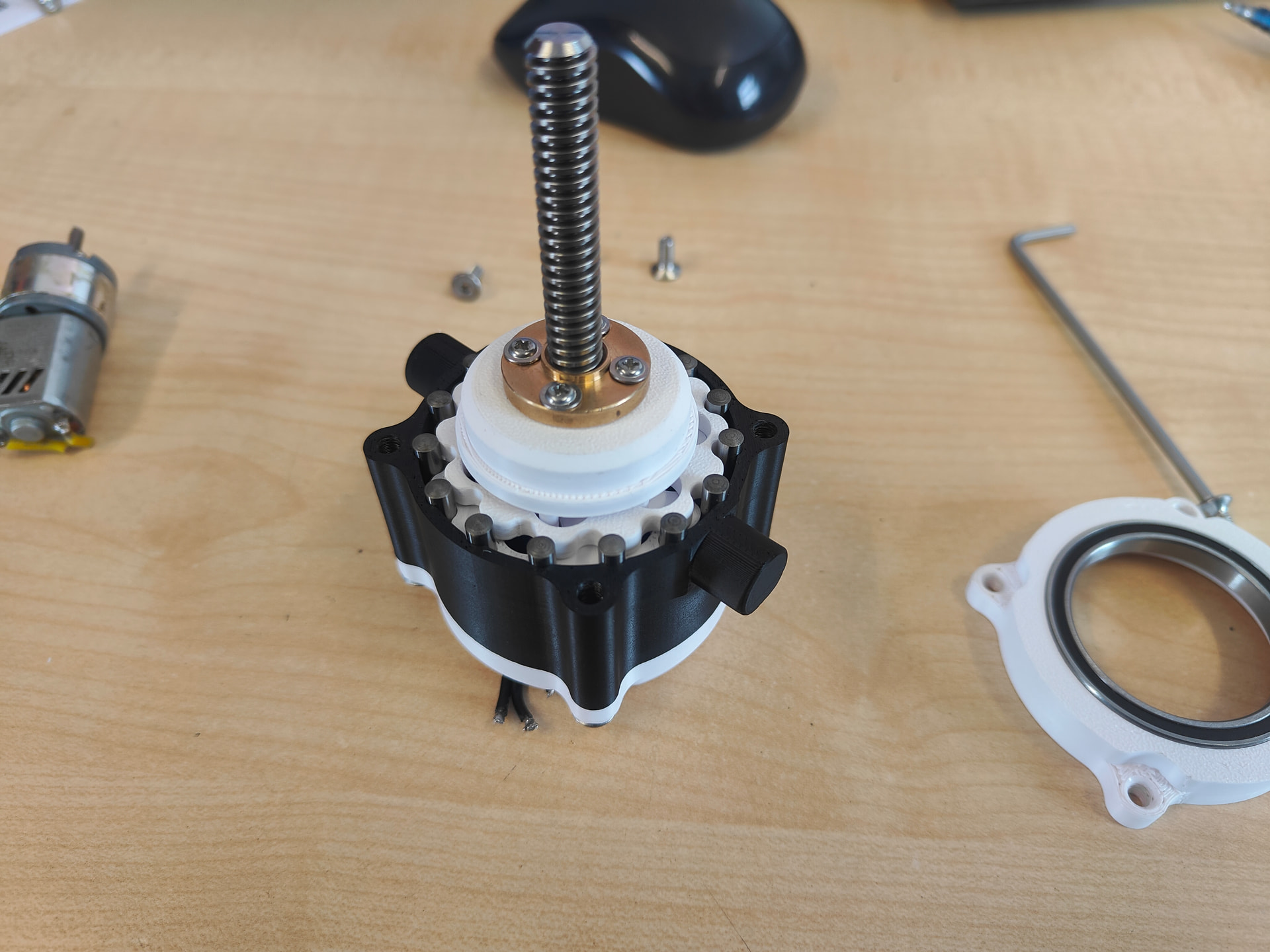
The output is plopped on and the endcap holds the whole shebang together like a family
As a great man once said
That sounds too much like commie talk for me, stick yer damn gears mate! I’ll be over here with a bunch of funne shapes, a whole bunch of friction and a copy Of Atlas Shrugged to eat while I make bad decisions like a true individualist.
Just call me “Harry Rand” from now on.
Indeed, much like an individualist I couldn’t have gotten anything done without the hard work of other people that I can pass off as my own and benefit from massively.
This article, and more importantly this formula:
N - Number of rollers
Rr - Radius of the roller
R - Radius of the rollers PCD (Pitch Circle Diamater)
E - Eccentricity - offset from input shaft to a cycloidal disk
x = (R*cos(t))-(Rr*cos(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))-(E*cos(N*t))
y = (-R*sin(t))+(Rr*sin(t+arctan(sin((1-N)*t)/((R/(E*N))-cos((1-N)*t)))))+(E*sin(N*t))
Are all you need to make make your own pleasing little wobbler.

Good proof of concept I thought. I’ll go away now.