I’ve always thought the best design ethos for antweights is “Serious antweights are cringe”. To me, antwieght robots have always been about sliding one aspect to the extreme. With that being said I made some over-engineered, not serious ones for SCAR 4.
F3
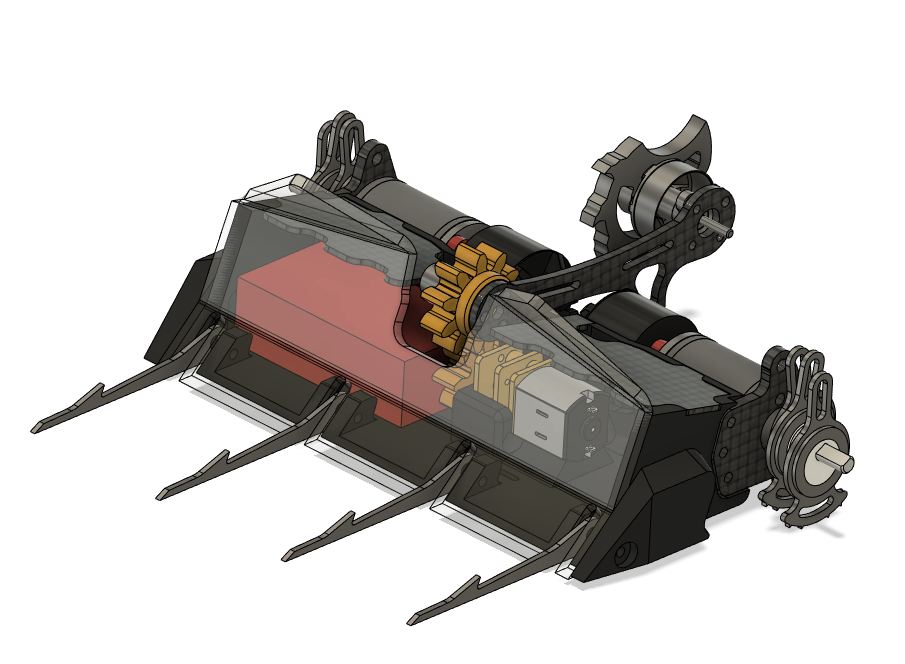
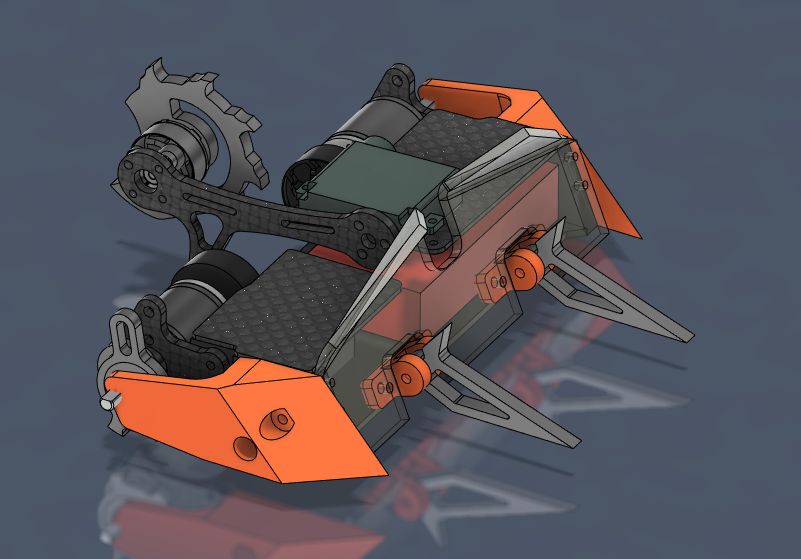
If you went to Robonerd, you saw the last version of F3, this version had a few changes in order to fix it, includes new frame (bulkier), new (bigger) lipo, new forks (Yes, they’re unnecessary ![]() ) & the weapon got pushed forward by 5mm, felt like as the larger vertical spinner I really wanted to maximise that insane reach advantage it has.
) & the weapon got pushed forward by 5mm, felt like as the larger vertical spinner I really wanted to maximise that insane reach advantage it has.
Just some photos I could find around.
TPU frame now, 2 pods which are connected to the Carbon Fibre brace, didn’t have any issues with it the whole event. (Thanks Rob & Filo for making these bits <3)

End boss who? These were really overkill, but I had them done since V1 all the way back last year, felt time to put them on.

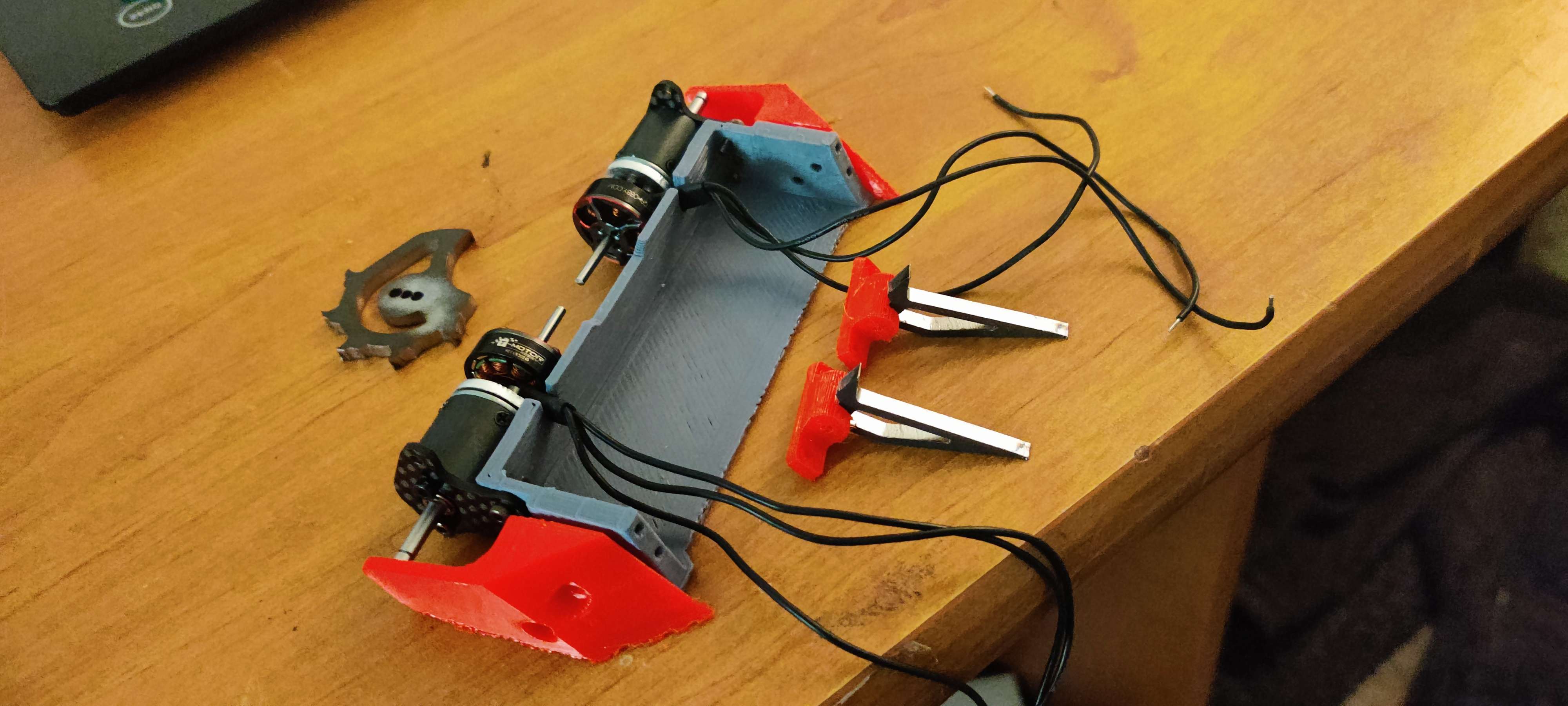
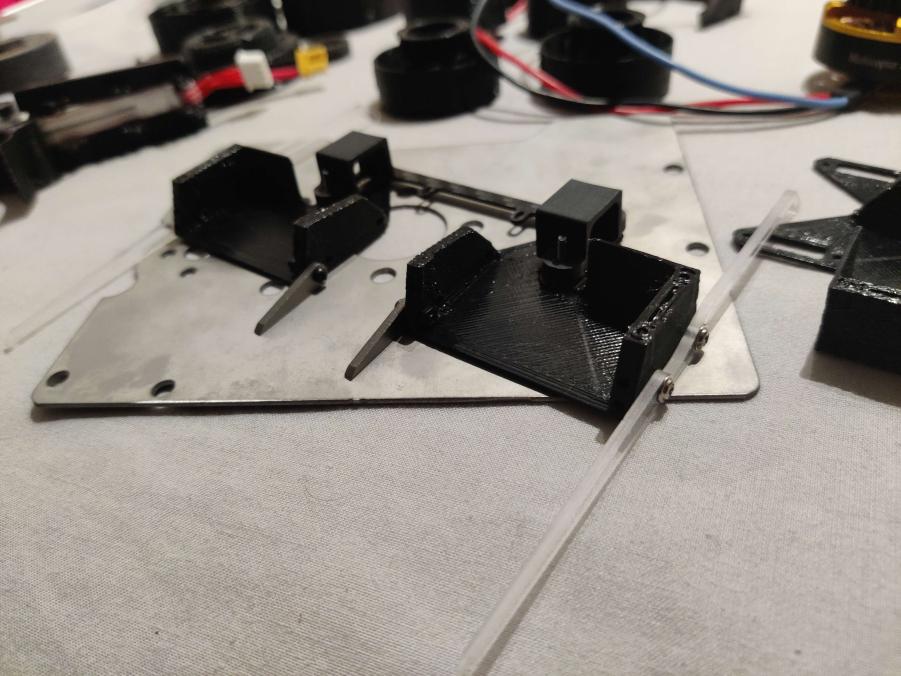
Assembled frame & electronics. Nearly raring to go.
Landmine
Main topic of this post. New build, new silly. Just something that exploded after one hit. A real big “Highlight reel” robot, even if it was for the opponent. So I do my usual, message Rob Weston.
Chit chats with the GOAT
In conclusion, evolve the Gordon.
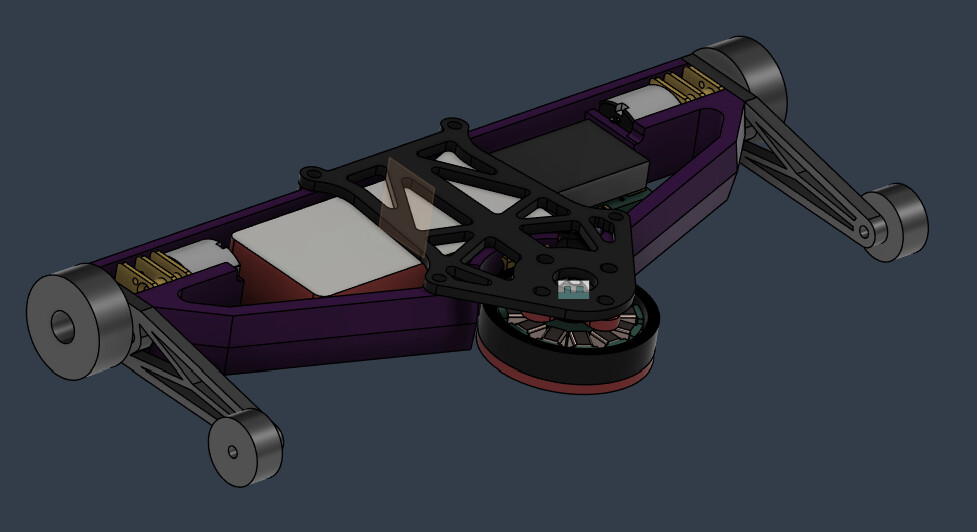
Landmine required a good amount of “tactical weight saving” took the dremel to it a bunch to make weight, but overall nothing that really changed the core concept of the robot. I don’t have many of the build process images, but hopefully it can show in the following.

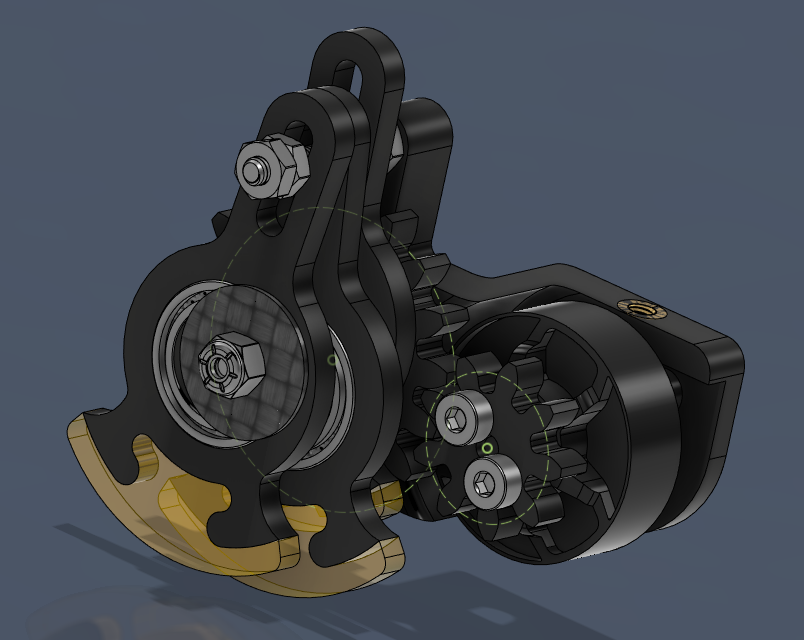
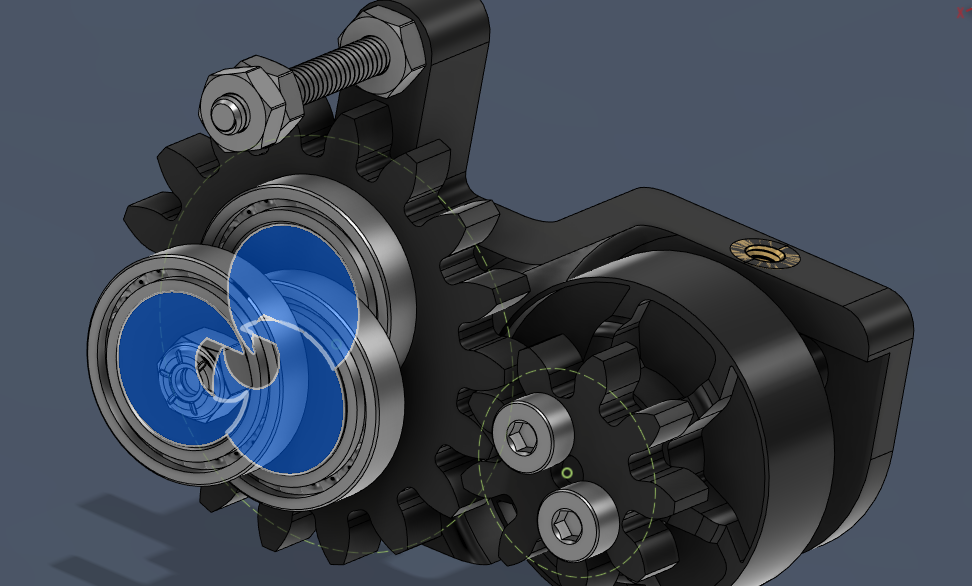
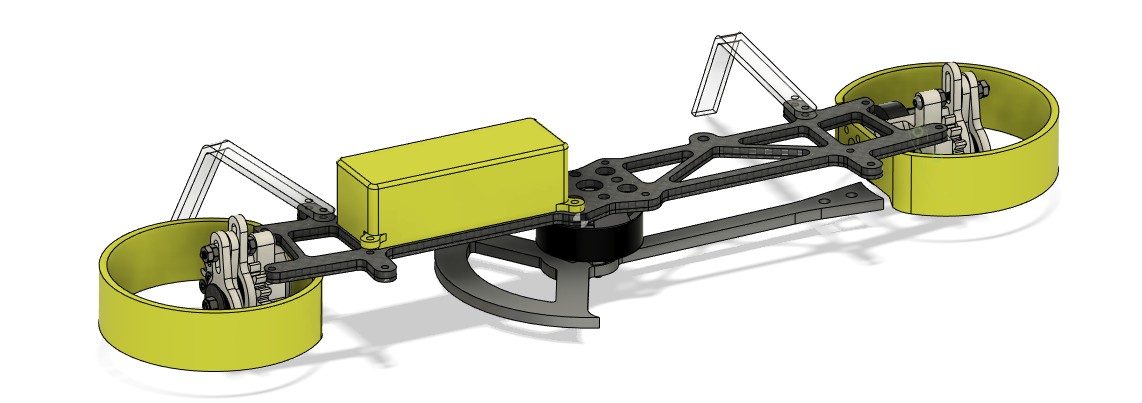
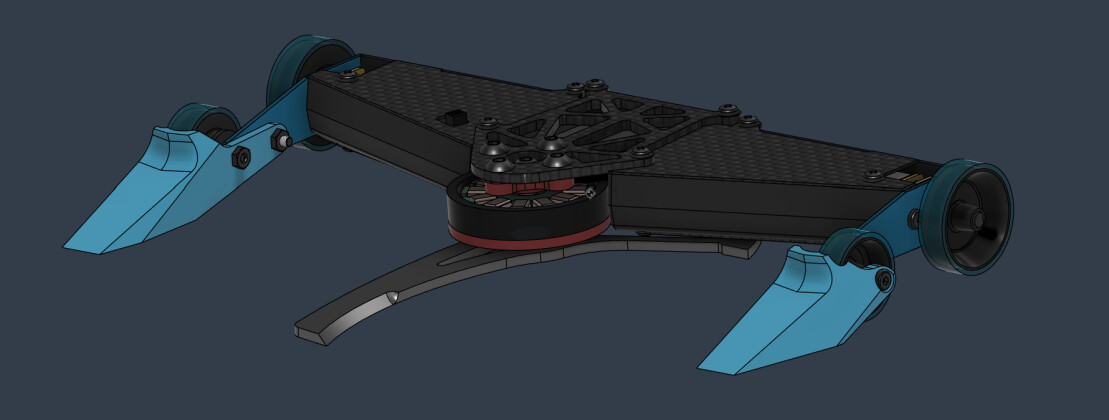
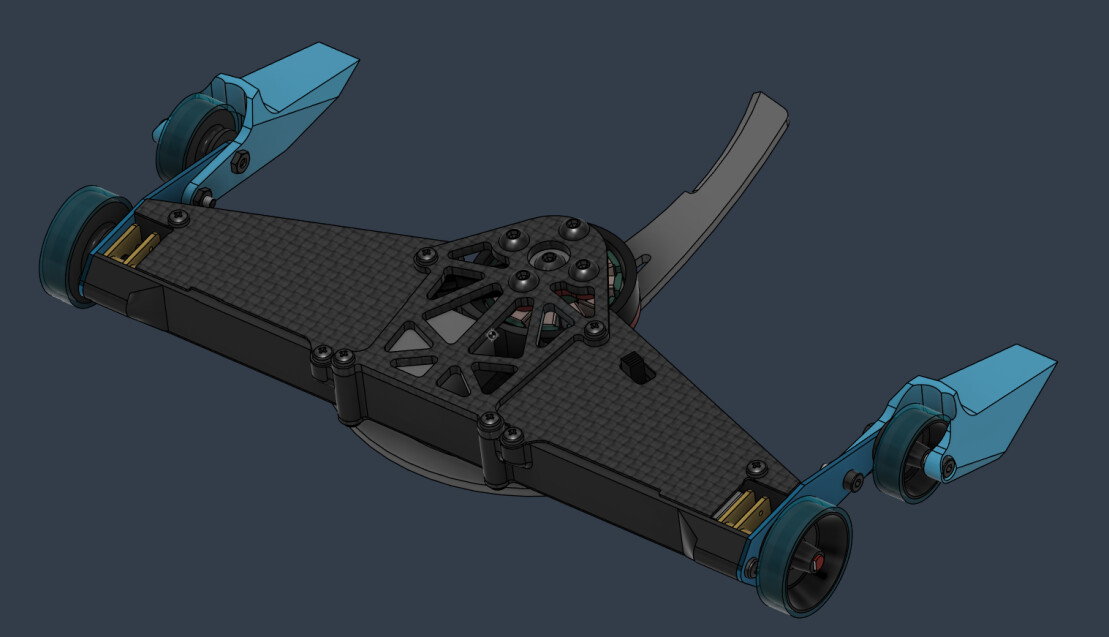
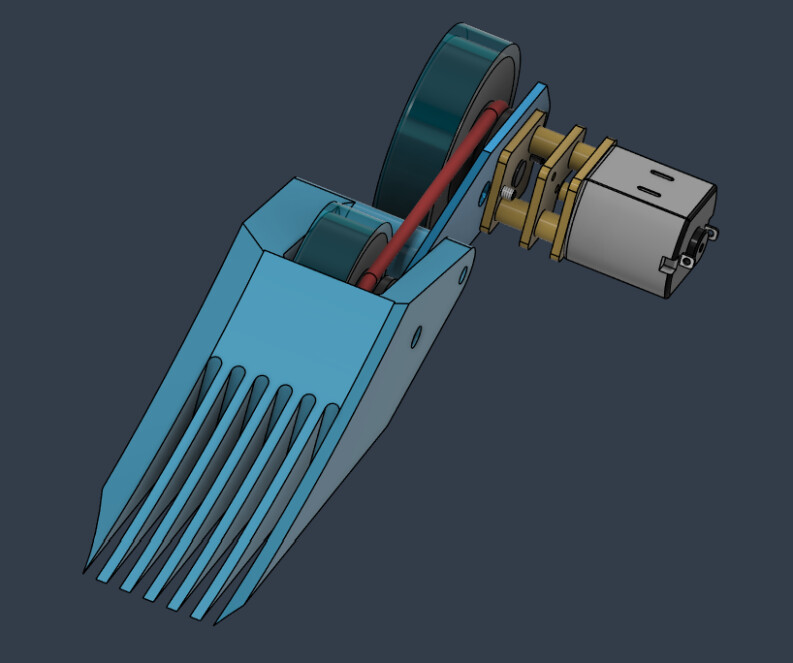
Some CAD design for it, don’t think it was particular hard to get right, atleast when I was doing it.

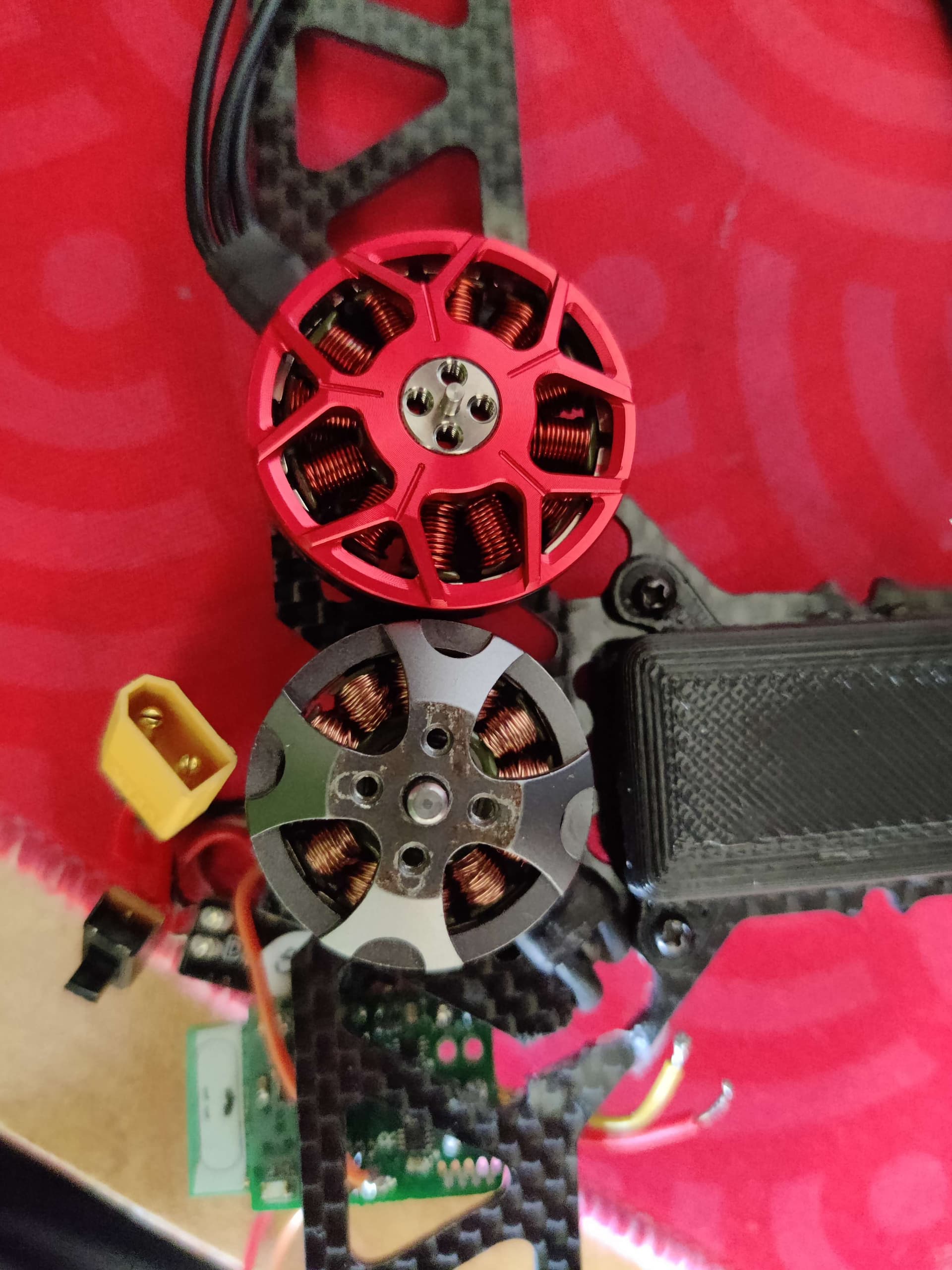
Carbon Fibre frame, top of the picture, along with various Filo & Rob made bits for other Ant & Beetleweight things.
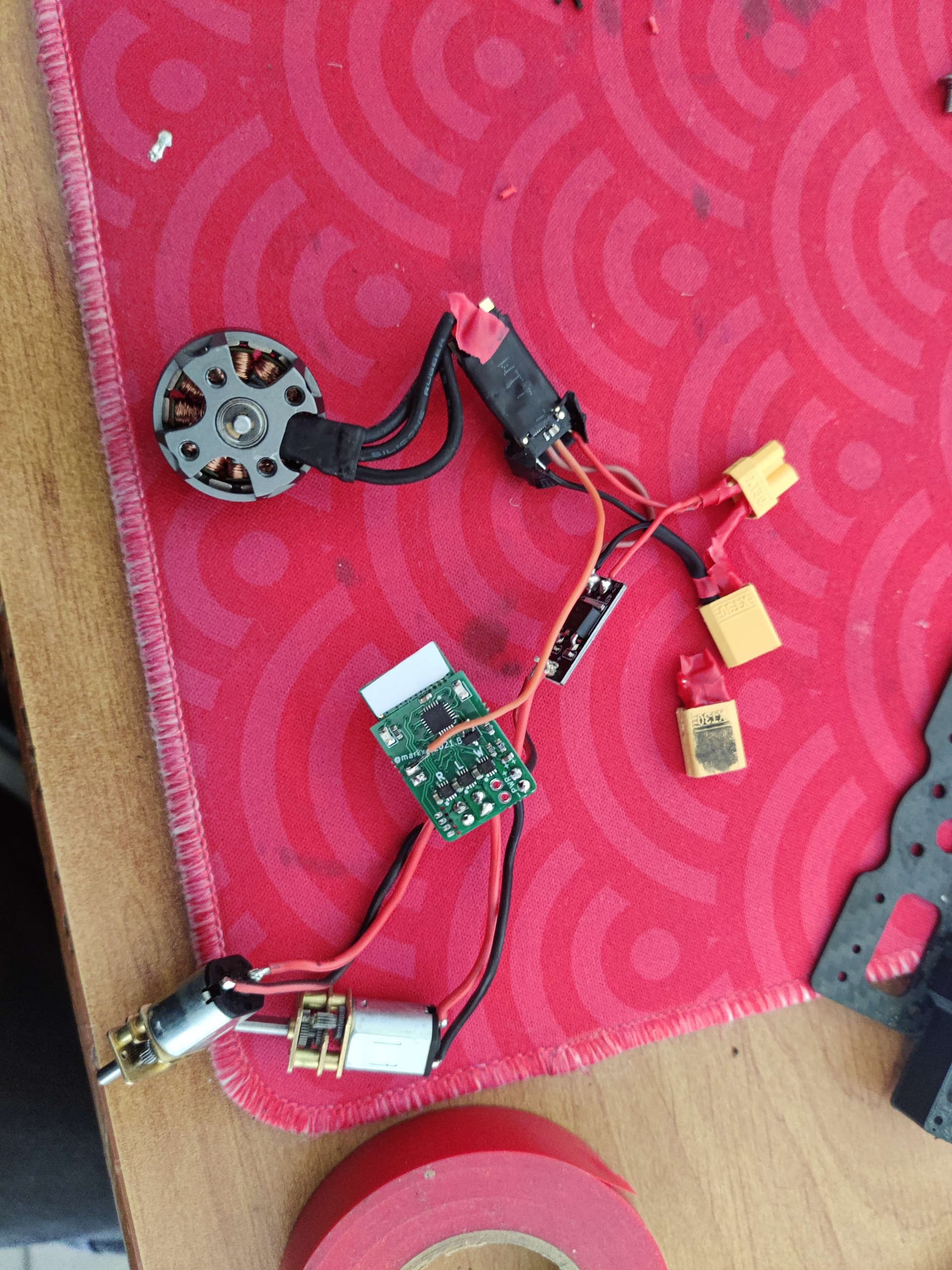
Electrically, here’s how it works, 3S lipo in, 3S voltage goes to brushless ESC & BEC, BEC goes to malenki. Later swapped the link out for just a regular switch.

Much of the rear carbon fibre get dremelled, tail also, changed some screws, wiring, some mounting holes went. But there’s both robots, ready for the event.