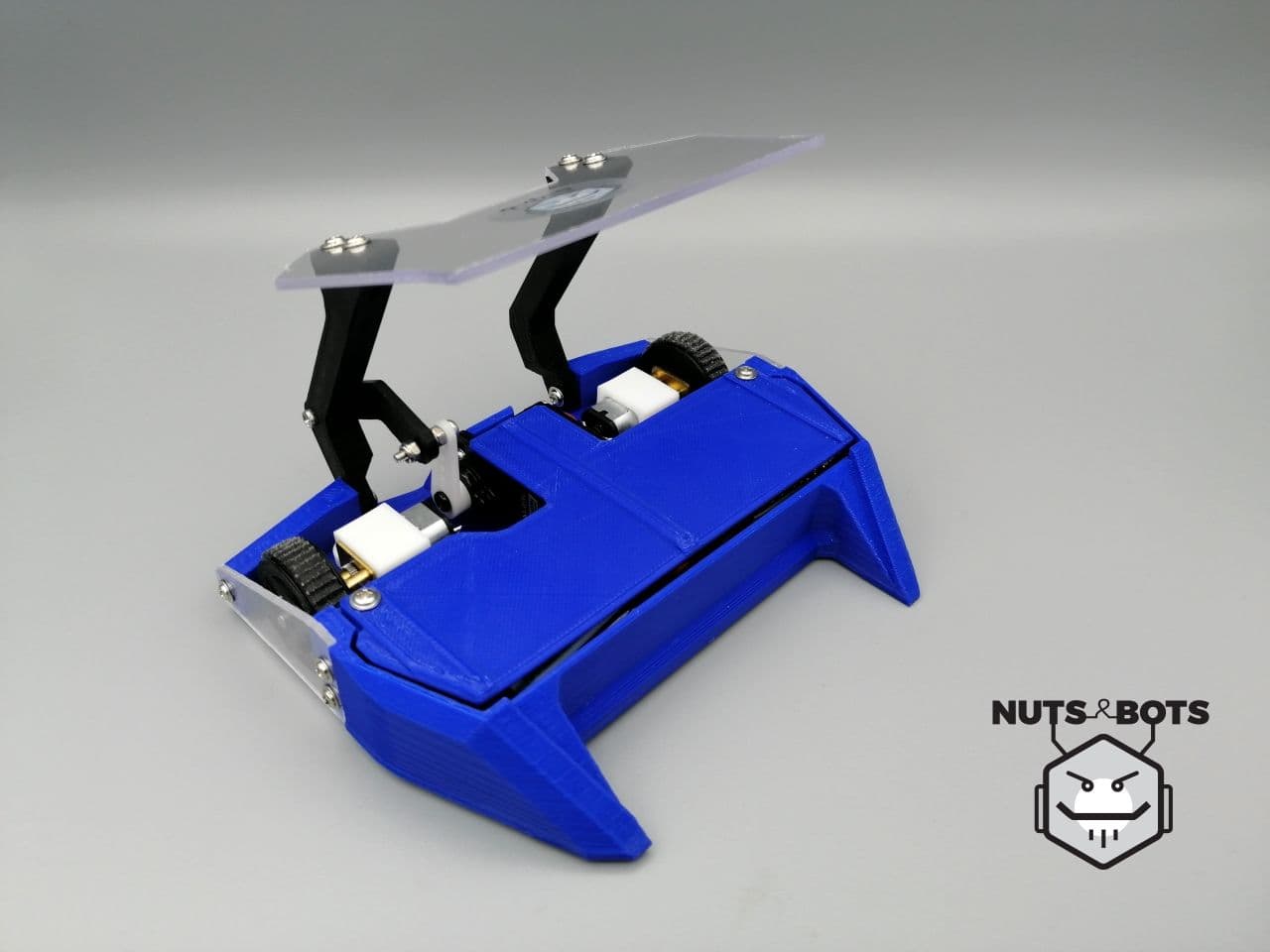
I’m on the home stretch of my antweight flipper Nova and all my electronics work and it drives. My servos turned up a couple days ago and ive been trying to design my flipper.
(sorry for no screenshot I’m writing on my phone)
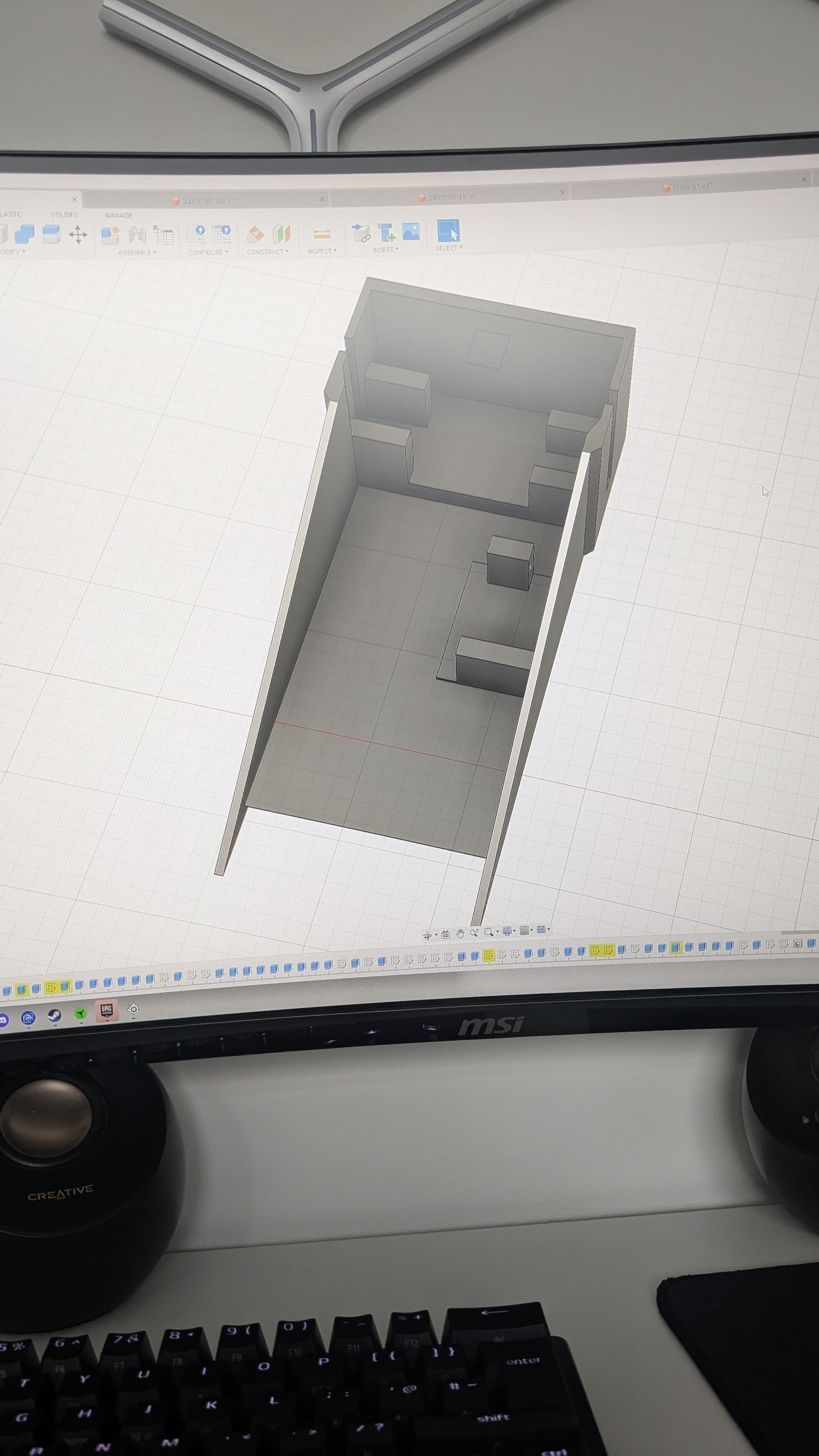
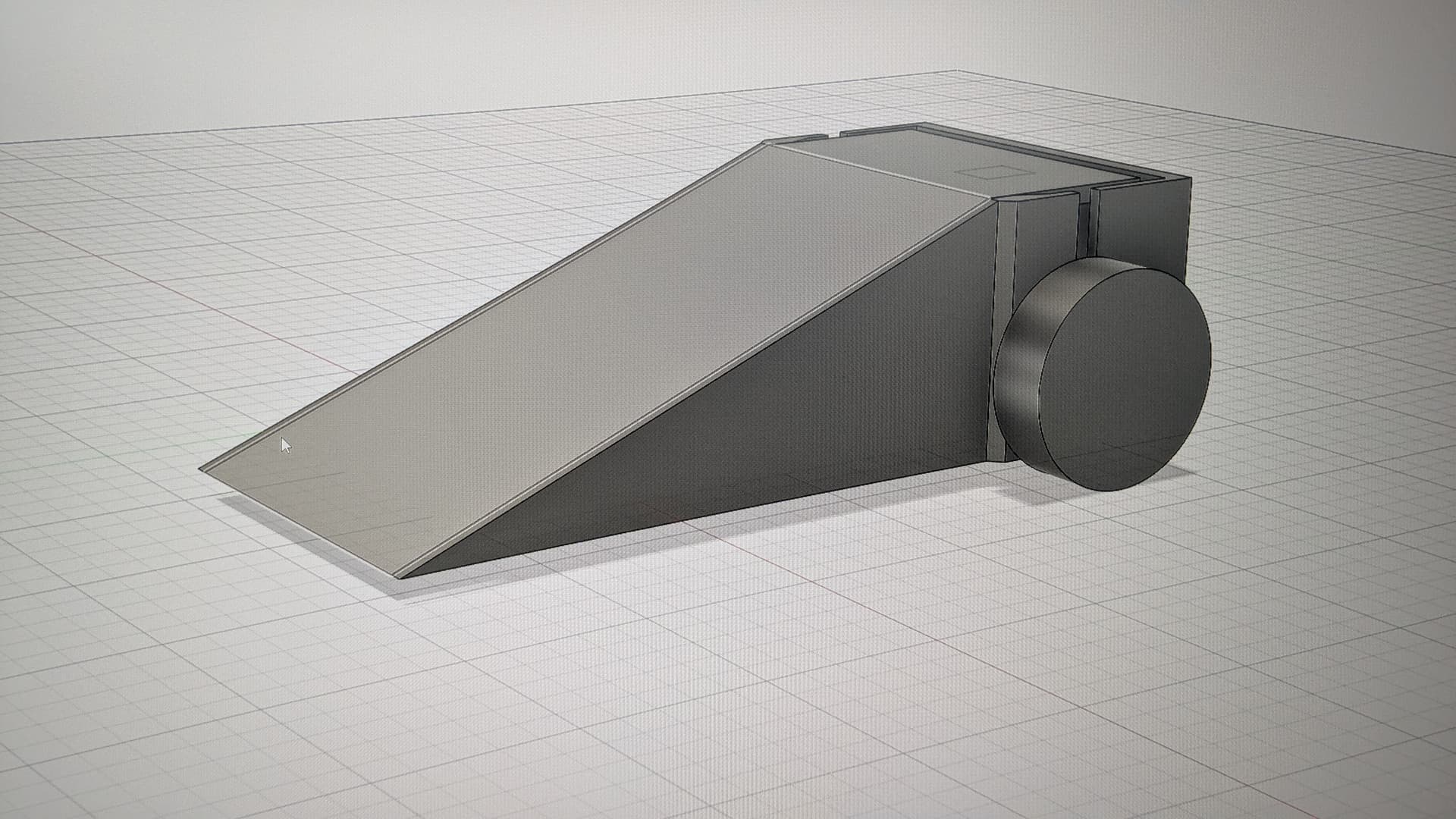
I have got my chassis with drive mounts and a servo mount CADed in. What I’m really stuck on is how to get the rotation from my servo to my flipper and how to hinge it.
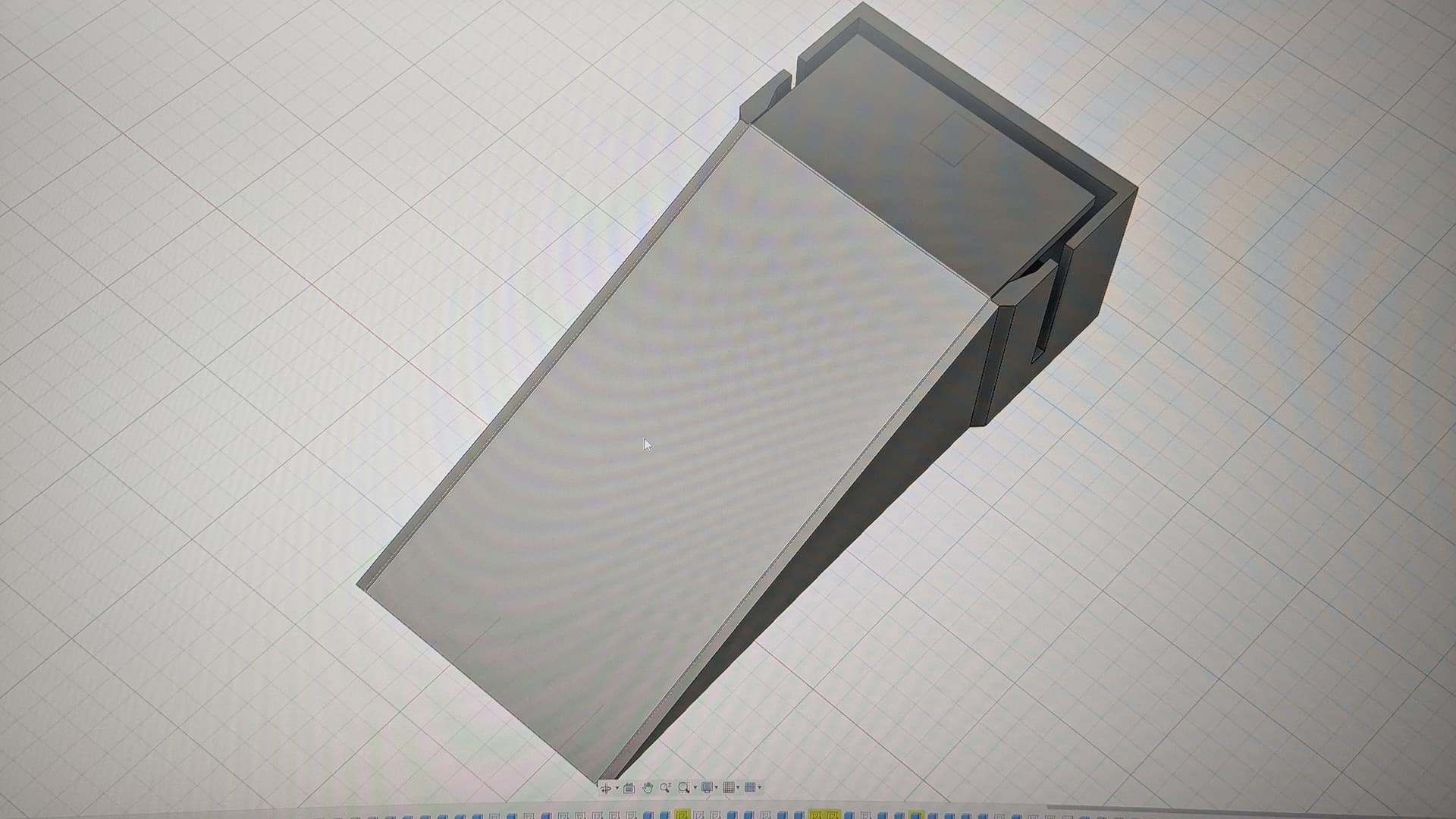
those are some pics of the bot with the flipper shown.
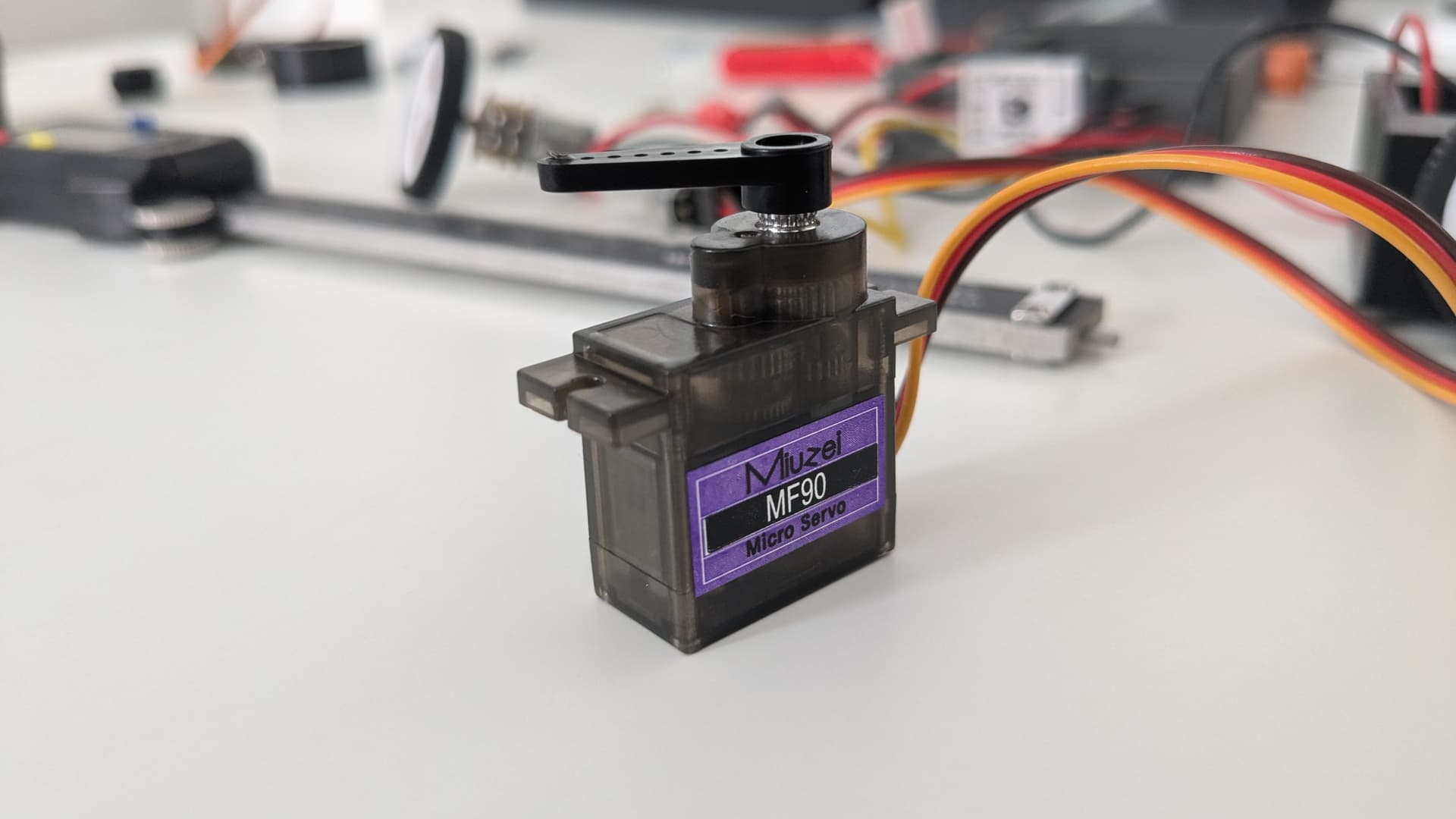
cheapo servo I bought on Amazon that is surprisingly fast and strong.
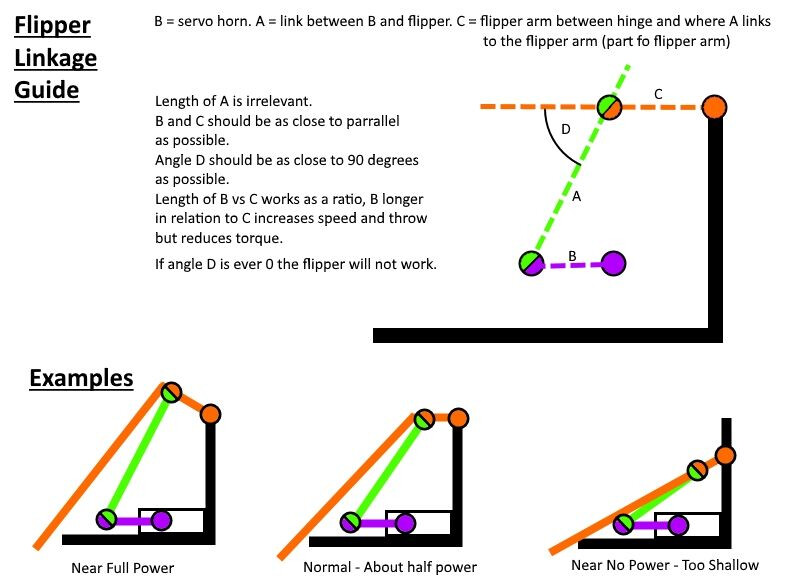
Ive Seen some people do something with like a little linkage to the flipper but I have no idea with the hinges. If anyone has any pictures of how they did it it would be great to point me in the right direction. And if all goes well see you at the June ant event.