The first version of Impulse had a really decent run at rapture this year, winning its heat before getting knocked out early in the round of 16. Despite being incredibly happy with its performance, the robot proved to be not so user friendly when it came to pit repairs, mostly due to each wheel being motor driven which made the robot incredibly busy internally especially with how awkward it is to remove and attach the belt driven lifter.
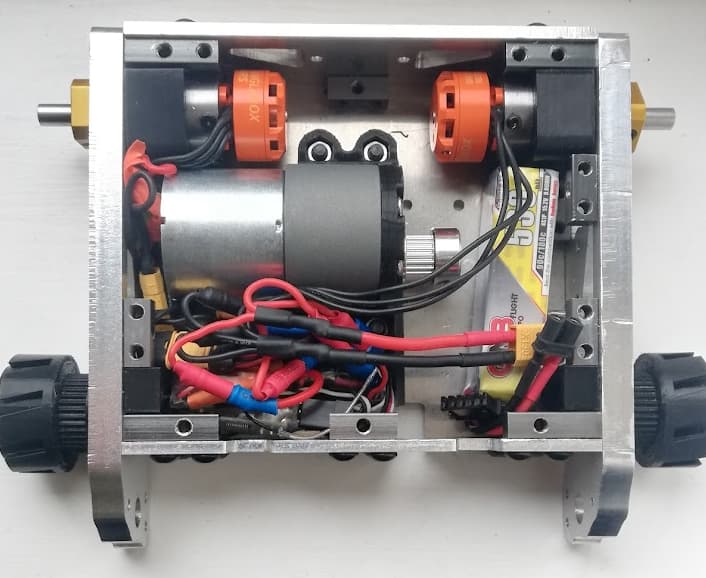
I had already began designing the second version before heading to Rapture with the aim of building it after for 1 or 2 events at the end of the year. My main goal was to go from 4 brushed BBB 22mm gearbox and Mars RB180 Conversions to just 2 1806 motors with 25:1 gearboxes, not only to allow for easier maintenance but also to give myself enough weight to re-add TPU side panels like I had done on the very first iteration to better protect the front wheels.
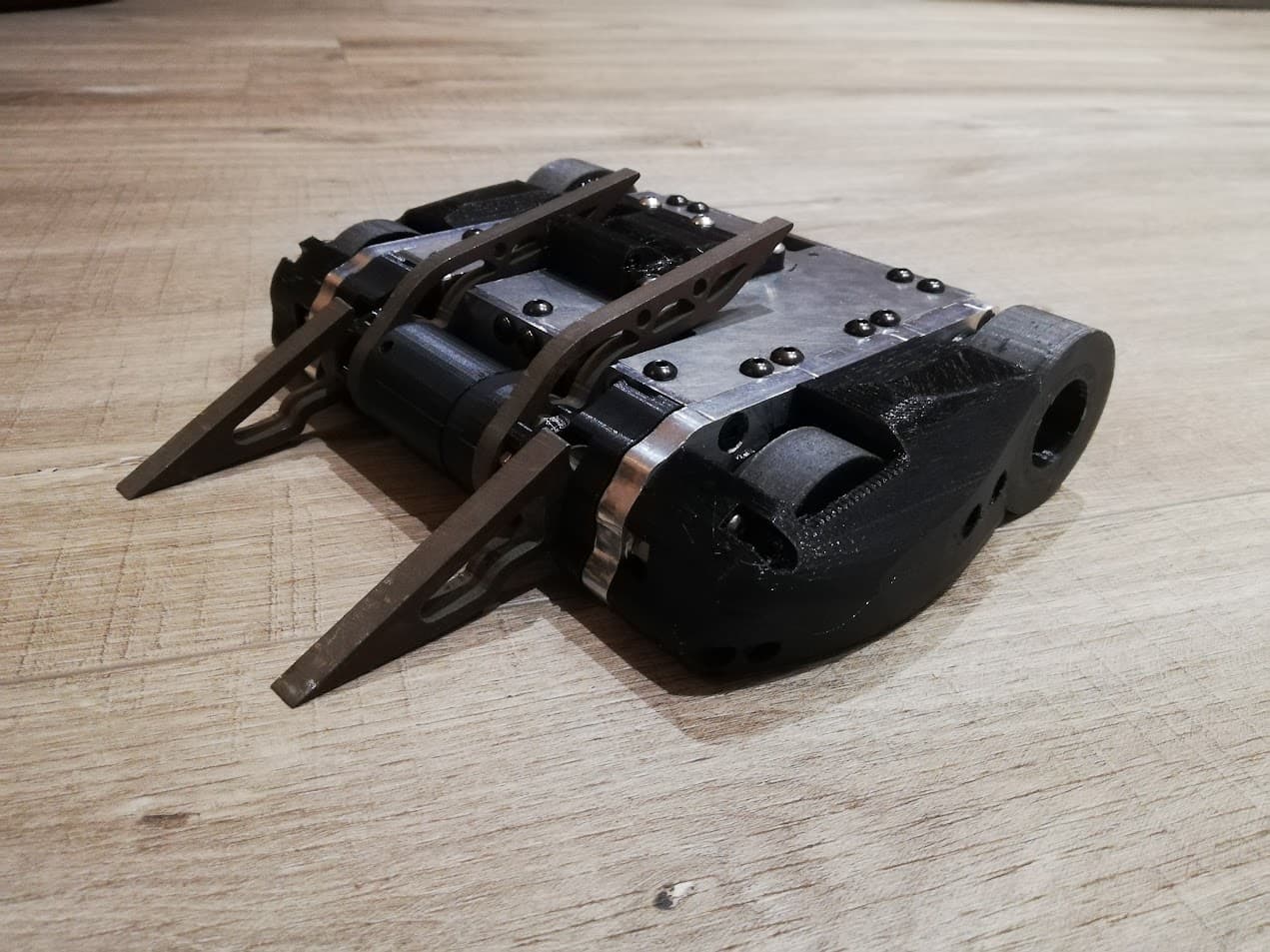
The entire frame was milled using my 3020 v2 cnc which handled the thick 8mm bulkheads relatively well although at very shallow depth of cuts and slow feed rates taking about 2 hours finish one of them. The tyres are casted from 60a Polyurethane like the old version, with the front wheels now being considerably smaller to ensure robots don’t make contact with them when getting underneath and obviously to reduce the chance of them getting ripped apart.
Electronics wise, it uses 2 Mars brushless esc’s for the drive and a BBB single brushed esc for the 37mm OD lifter motor both powered via a 4s 530mah lipo battery. The inside is still quite busy, but the need to only focus on the maintenance of 2 motors should hopefully make life in the pits a little easier.

New and Old

Drive Test

Self Right test
Overall I’m really happy with how its turned out. Plan to enter it into both Champs and Battle in the Burgh.