Intro
So this is JackHammer for those of you who don’t know it already. It hasn’t always looked like this (hence build log) so I reckon I’m gonna break this down into a bunch of sections and try and post them when I can be bothered to write it up. Since I started the robot ages ago I won’t do a build log of the previous versions because I don’t have enough fun accompanying pictures, but I’ll do a brief summary and then try to go into more depth on the current design and why certain parts are the way they are.
Origin story:
So the jackhammer story starts a few years ago (2022 maybe?) with a robot called under achiever. The first robot I and teammate Jools Clarke had ever competed with. The idea behind under achiever was that it would be a massive 2wd undercutter and that means that it would win because bigger weapon = more winning. It was all designed with no real idea in mind for what is sensible for a beetle or any competitive robot in general, some of the small things were done nicely with most of the bigger, more important features being somewhat overlooked. It all hinged around this big ol brushless motor the size of a cricket ball with a huge 10mm thick 230mm blade directly bolted onto it because I’d seen people do that in ants so surely it just scales up…

Under Achiever
Either way it ended up being like 750 grams of weapon assembly all in all and the robot was kinda ass. (I may or may not be currently working on a new robot featuring an ~800g drum but that’s for another post – hopefully come see it in may I’m sure it will be terrible.) The weapon took forever to spin up even with the gigantosaurus motor and the robot suffered badly from wonky table physics meaning it almost never had both wheels on the ground. All in all, left lots to be desired. Oh also I drove it so incredibly terribly which is the reason we ended up going out. Only mentioning it now because believe it or not this is a recurring theme and it’s what I attribute to being the main reason why jackhammer is so amazingly middle of the pack.
Jackhammer lore:
Jools and I spent the entire car journey back discussing the current meta and where we thought it would go in the future. Almost every alleyway we explored led to one thing, build a 4wd vert. We did not want to do this since we figured anything we built along this route would just be worse than all the other 4wd verts. We wanted to make something that there weren’t looooads of at the time (ironic now I know) so that way we could try and get somewhat ahead of the curve. We also wanted to try and innovate somewhat in the archetype. Anyway as we pulled into Cardiff we managed to outline the idea of what is now Jackhammer.
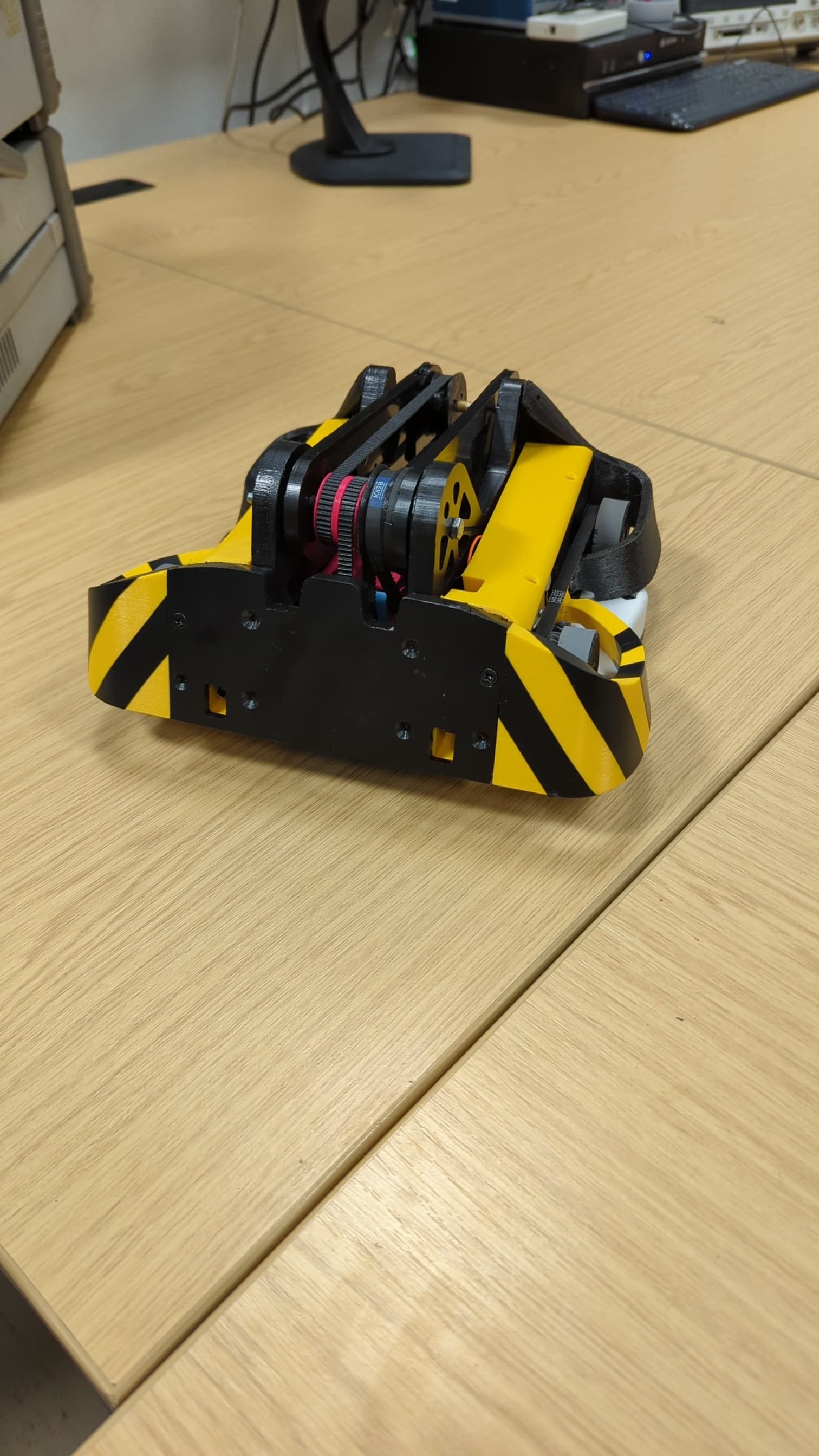
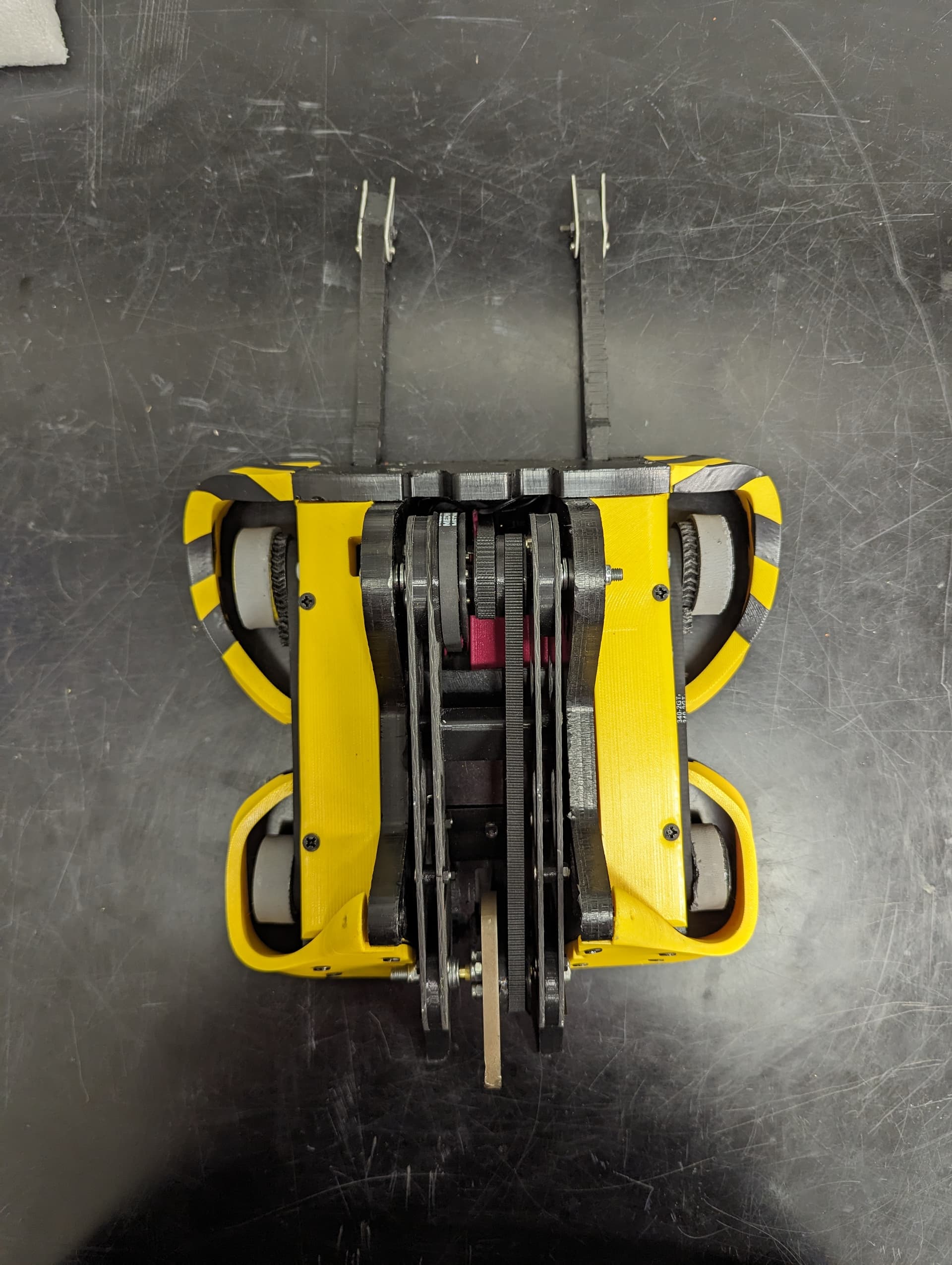
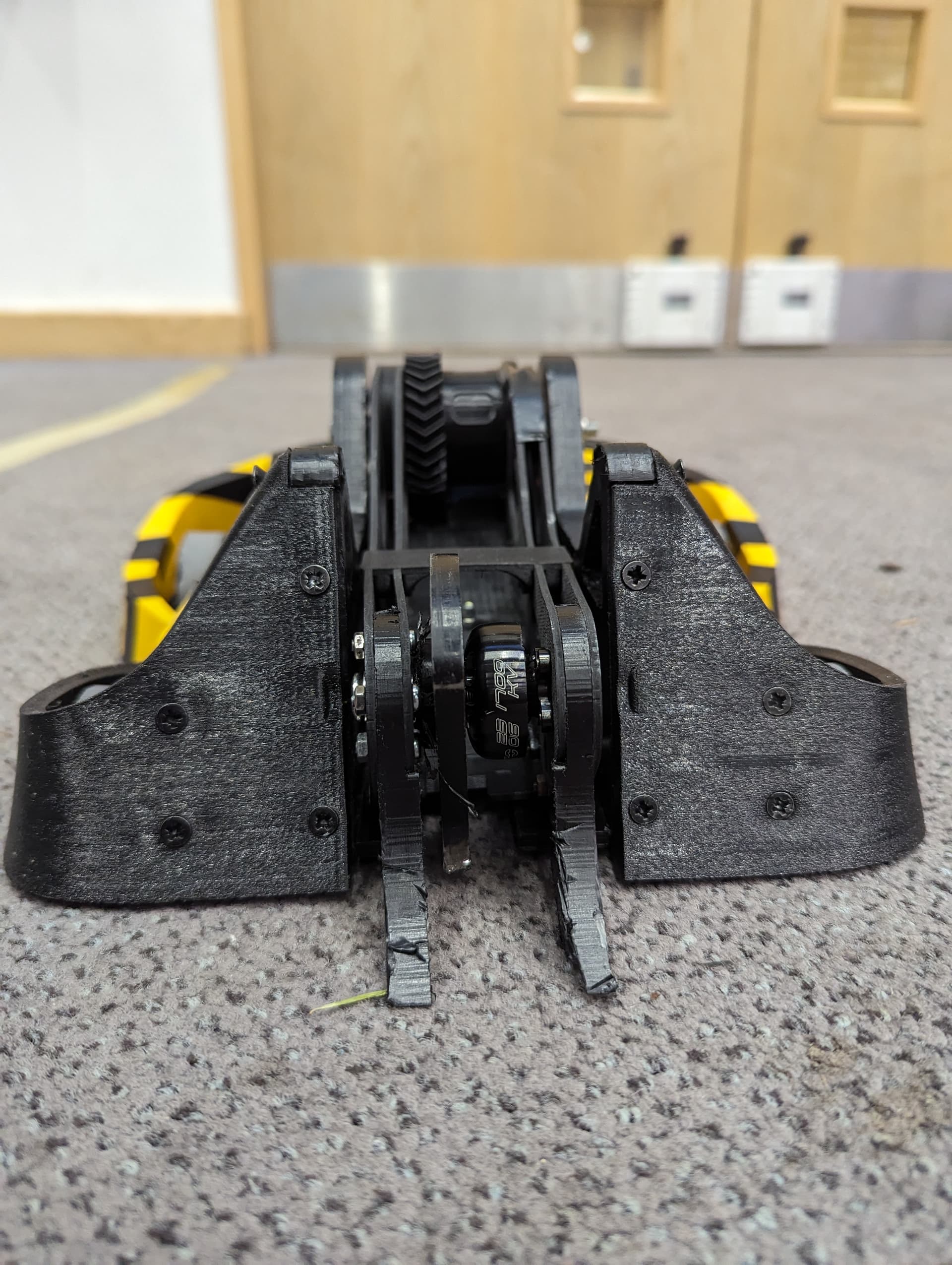
So, Jackhammer.
Is it a hammersaw? Is it a vert? is it a lifter? I don’t know, and therefore neither does the opponent. That was the idea anyway. Actually it was never meant to have the lifter forks but they got added when we realized it couldn’t quite self right as I’d modelled the disc in as a perfect circle and didn’t take into account the fact that it would move to a low spot when self righting. Since then, the forks stayed coz they’re cool and I can pretend to be whiplash. I don’t think Jackhammer has ever, or will ever have enough torque to lift anyone but it’s nice to be able to pick the rear forks up off the ground when they get stuck in the seams.
V1 babyyyy

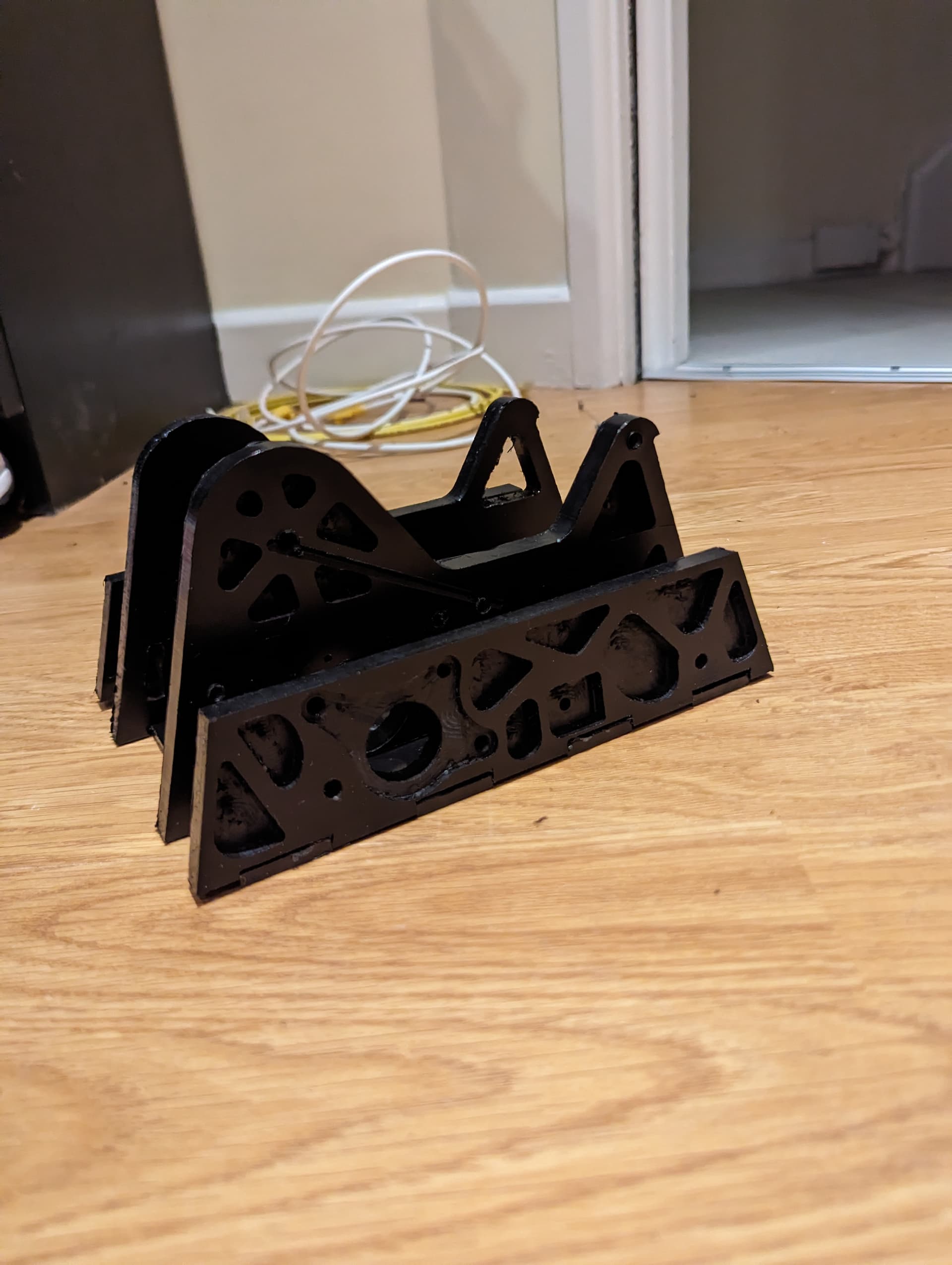
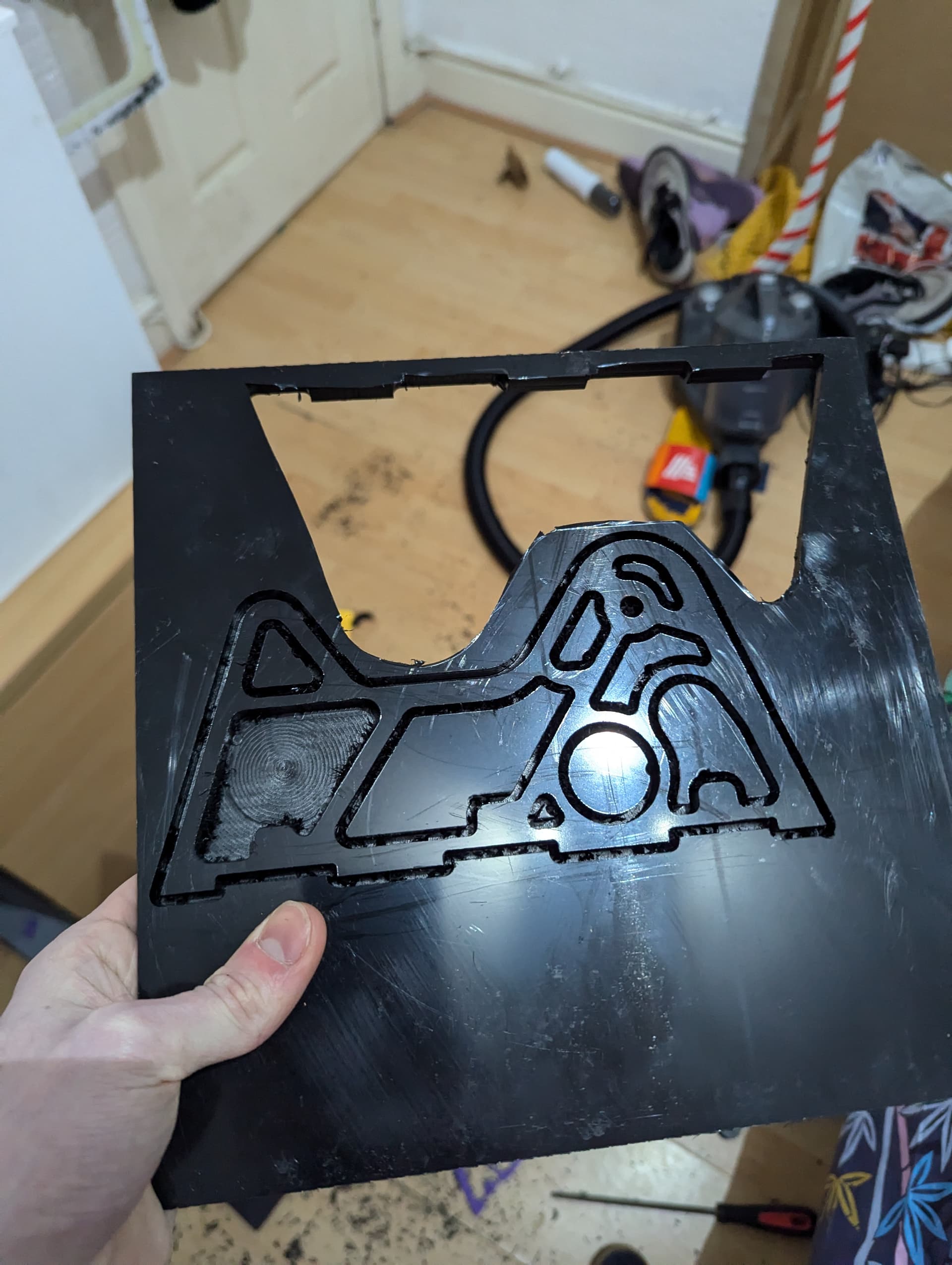
V1 with a stand in acrylic arm before the carbon one was done (also missing flimsy forks which poked out through the slots in the wej)

This was the spare arm made from HDPE which I forgot existed until I saw this picture. The carbon one was kinda the same but made from spaced layers not a blok.
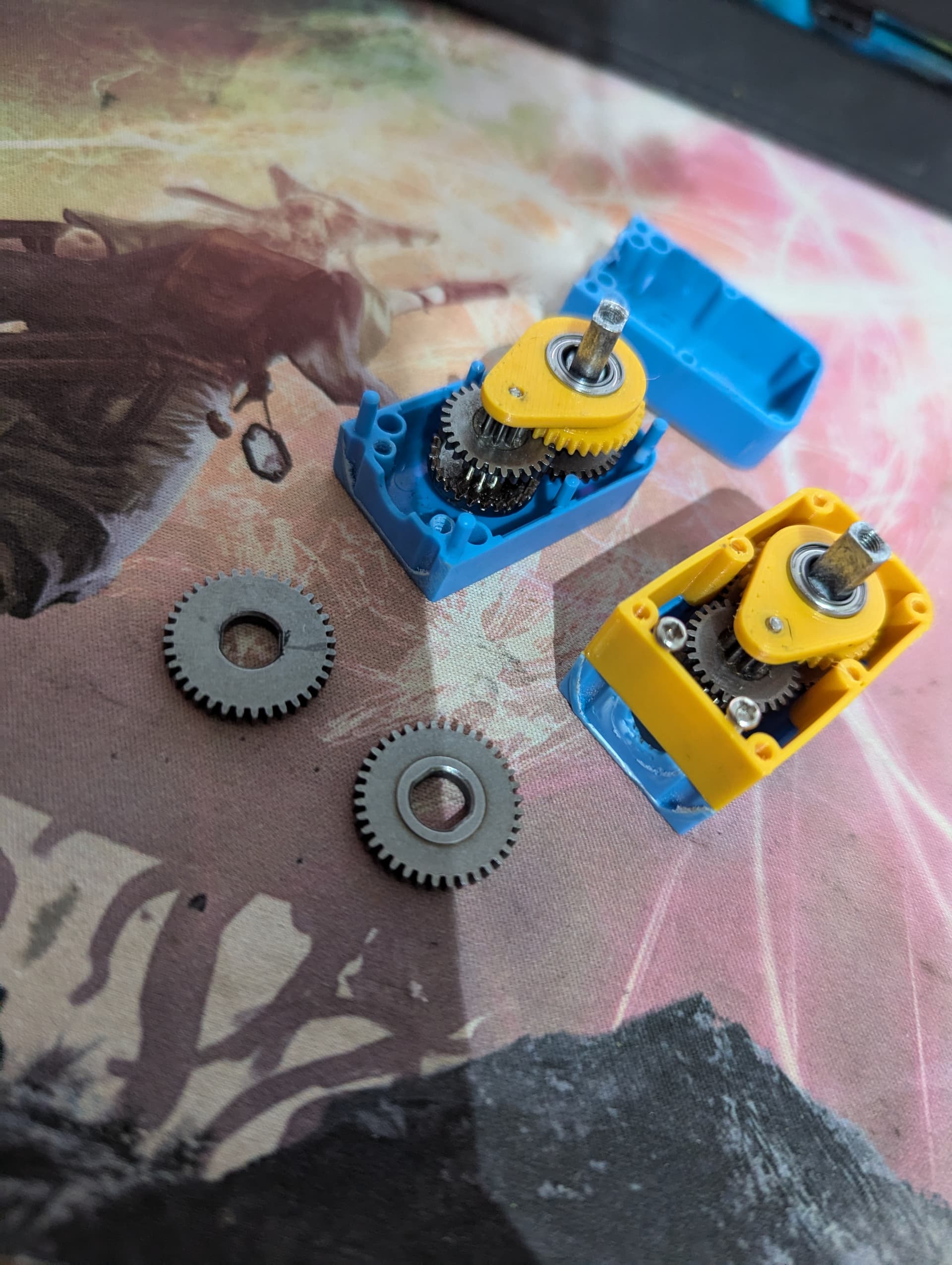
V1 Jackhammer featured 4 independently driven wheels off some brushless conversions we did on some BBB 22mms, a servo driven single side CF arm that Jools had done loads of simulations on with a cantilevered weapon motor and disc on the end. The disc was real hardox this time which we cut at uni and I sourced from somewhere that made rifle targets. Other than that we kept the same keying hdpe frame, introduced the start of the now iconic black and yellow theming and put tons of carbon fibre everywhere. (oh and also those really awesome super sturdy and tough 1mm aluminium forks) This robot was basically a child to us at this point having poured so many hours into literally every decision there was to make on the thing. I think when you don’t have a guage for what’s considered ‘standard’ you really have to think absolutely eeeeeeverything through a load of times and then change it a bunch of times when it conflicts with everything else. V1 was also meant to be run off an esp 32 to allow us to give a driveside more power mid fight if we took damage and to handle the drive inverting for vert mode. Ultimately we never implimented this because it was just another failure point and feature that we didn’t really need and totally not because we couldn’t get the code to work.
The first (and last) event we did with this was rapture 2023(?) and it was definitely an event that has happened.
What went well:
Watching other peoples fights
Lunchtime
What went badly:
Our fights (and robot)
Carbon fibre it turns out is pretty rubbish at resisting turning into confetti when facing spinners, so the cool fun bits all got instantly scranned up by jack and the chilli daddy in the first fight which was sad from an aesthetic point of view. We managed to go 1 and 2 in our heat, somehow beating Dave Weston’s 7th circle because it got itself awkwardly breached on the arena before it could touch us. I do think we had a pretty hard heat to be fair with The big vert of 7th circle, the chilli daddy (and also gizmo who went on to win the event but more about that later).
The main and pretty important problem this time, was ground clearance. The robot could barely move in the arena. We thought this was to do with the brushless conversions being weak but discovered afterwards it was a ground clearance issue (also yea the motors are fine coz I’ve run them in the next like 6 iterations after this). We had 3mm of ground clearance between the floor and the baseplate and then some flat-ish head woodscrews which stuck out about 2.7mm. Apparently 0.3mm of ground clearance isn’t enough who woulda thunk it.
So Gizmo – I think the shortest and most expensive fight I’ve ever been involved in - I think the fight lasted 11 seconds in total. Gizmo had to push us into our starting square before the match, we pretty much crawled to the middle of the arena, got verted, and landed squarely on gizmo’s weapon which ripped straight through the 1mm carbon bottom(big surprise) and then through 2 drive motors, 2 escs and the receiver. This impact sent us straight into the oota and that was it. Rip Jackhammer v1

Sizing up before the fight
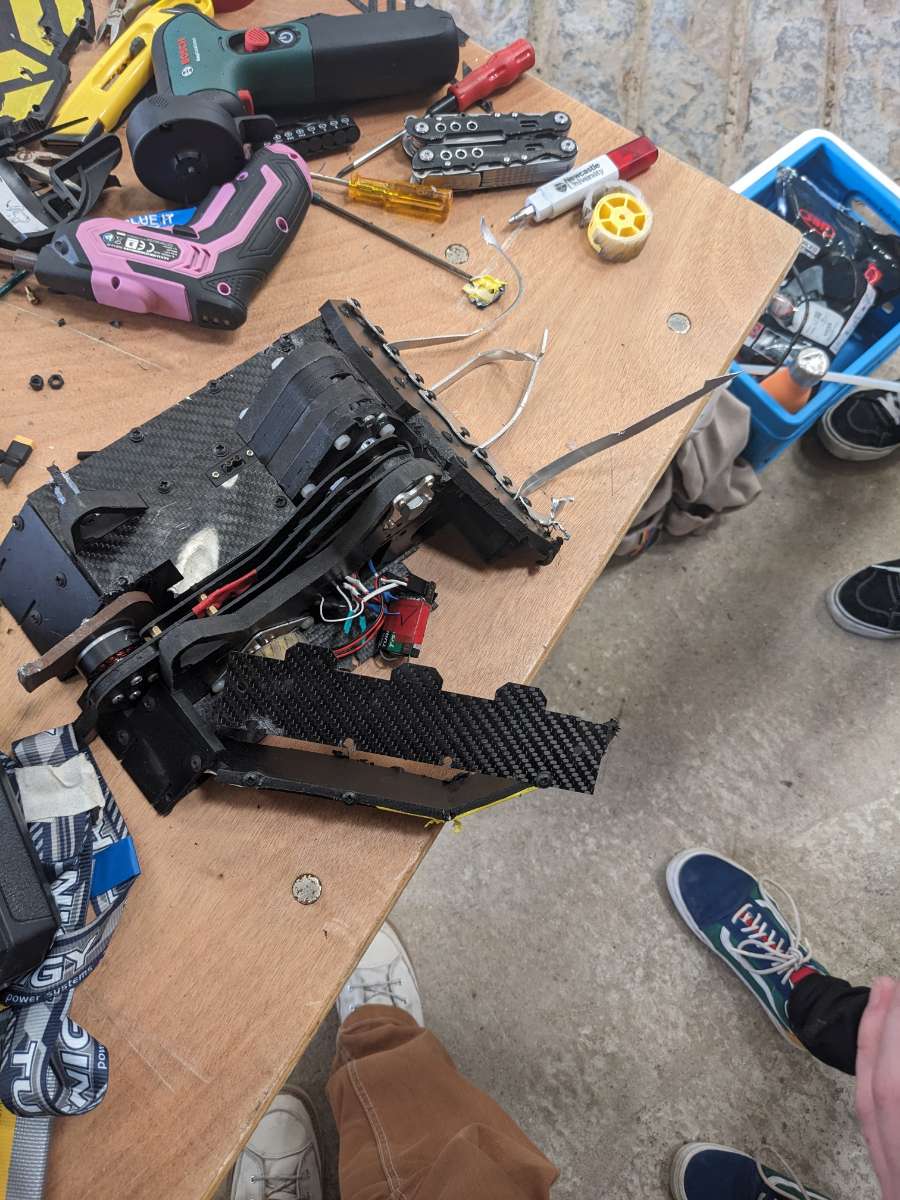
![]()
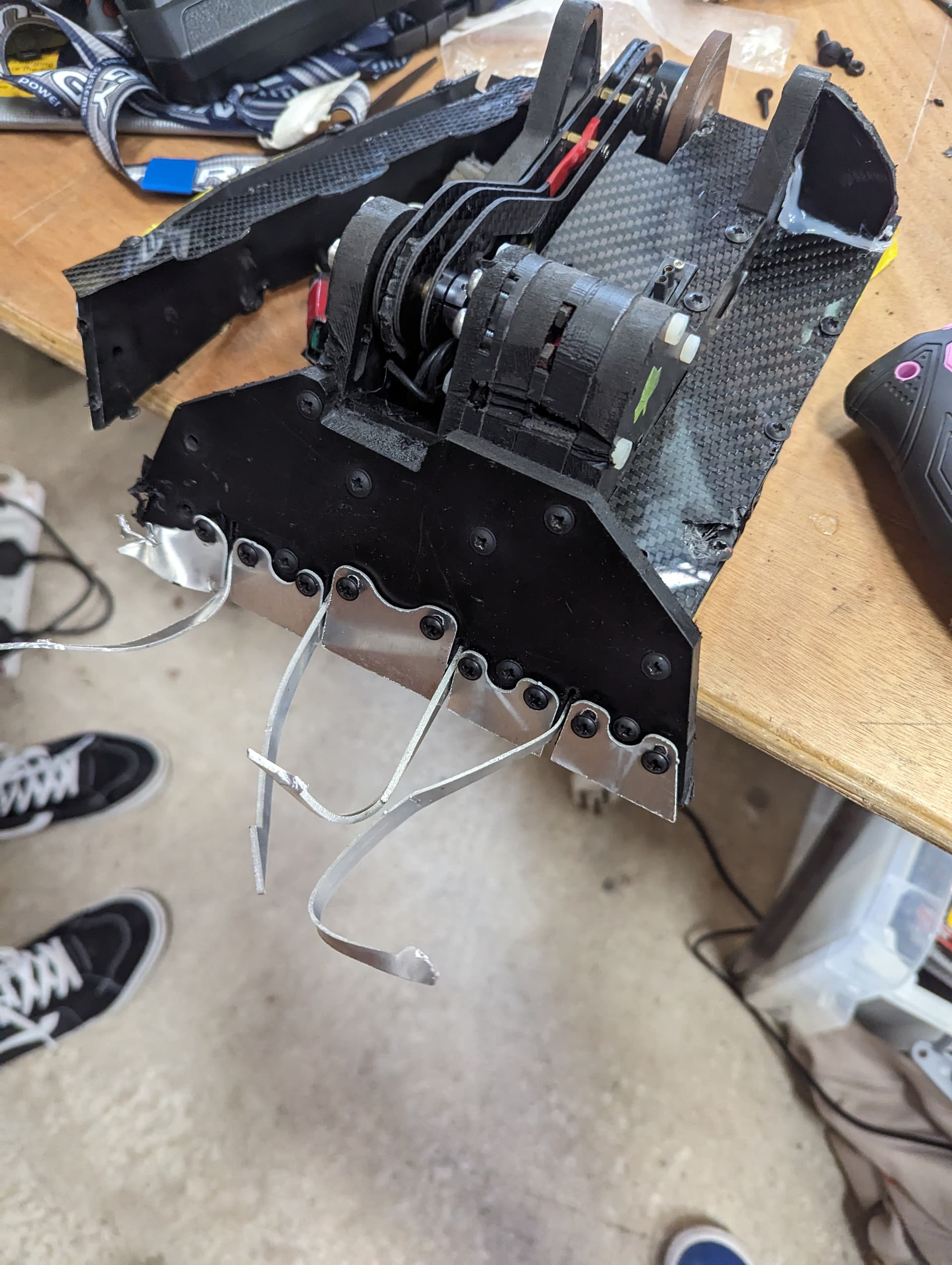
Those octopus tentacles used to be forks
Gizmo before and after, most of the damage was to the underside of the robot which I don’t have any pictures of but it was proper mangled I promise.
It took some motivation to get back to working on Jackhammer. The robot was completely totalled, and the execution of the design was clearly terrible. Jackhammer hadn’t managed to do a single bit of damage to an opponent, something it would keep failing to do for at least another 2 events. The only thing that kept driving this robot was that we thought there was potential for success in the concept. We were back at square 1.
Since rapture took place in the summer, my teammate had now graduated so I developed jackhammer mostly on my own from here.