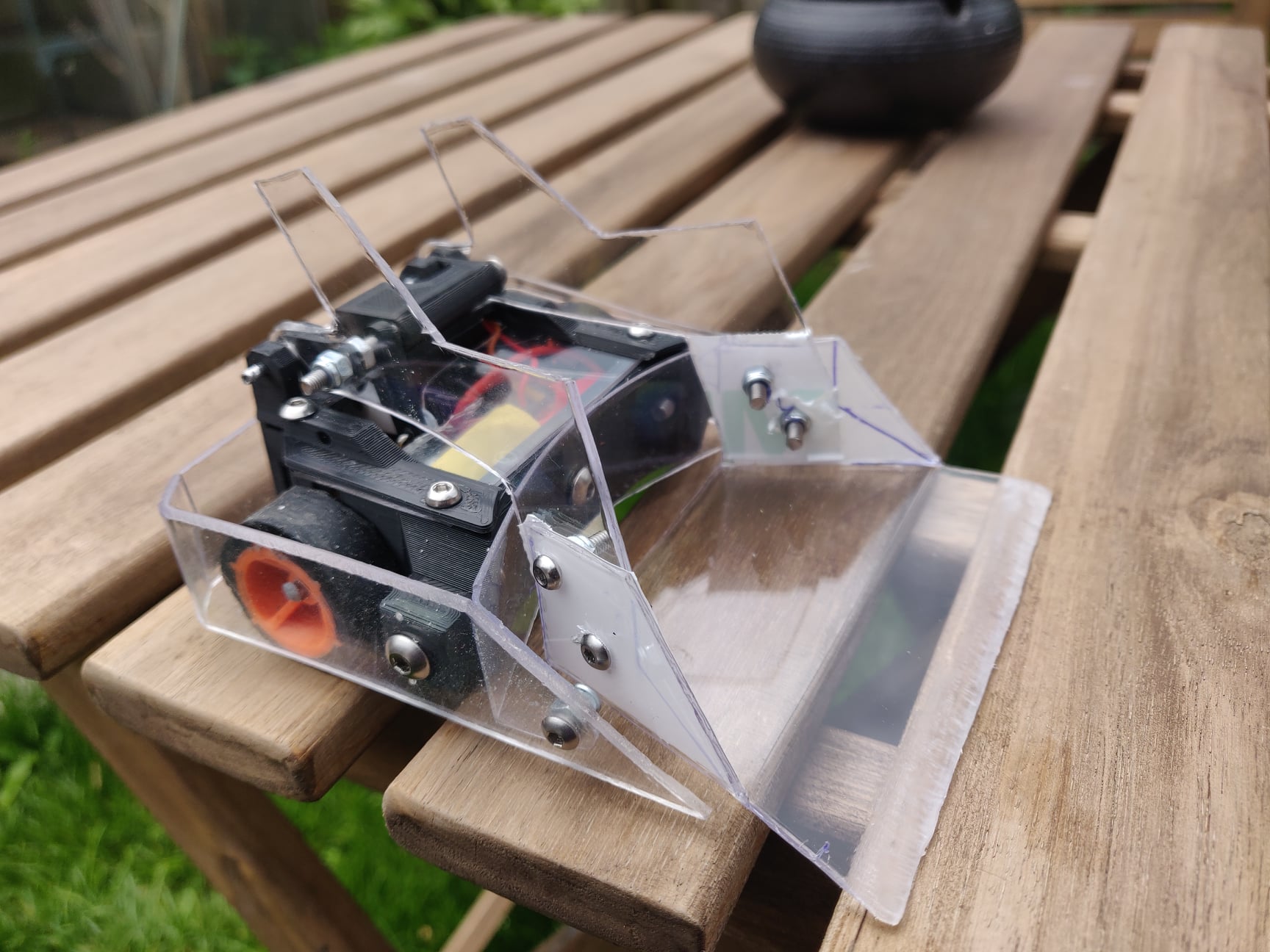
So after GetGot! My ant drum bent a motor shaft in testing and then another one at its debut event at orcs2 - I decided it needed something a bit more sturdy than a 2mm motor shaft for that big ole Ti drum to spin on.
So I got to thinking and with changing the Ti drum out of the question I figured the only real option was to look at altering the motor.
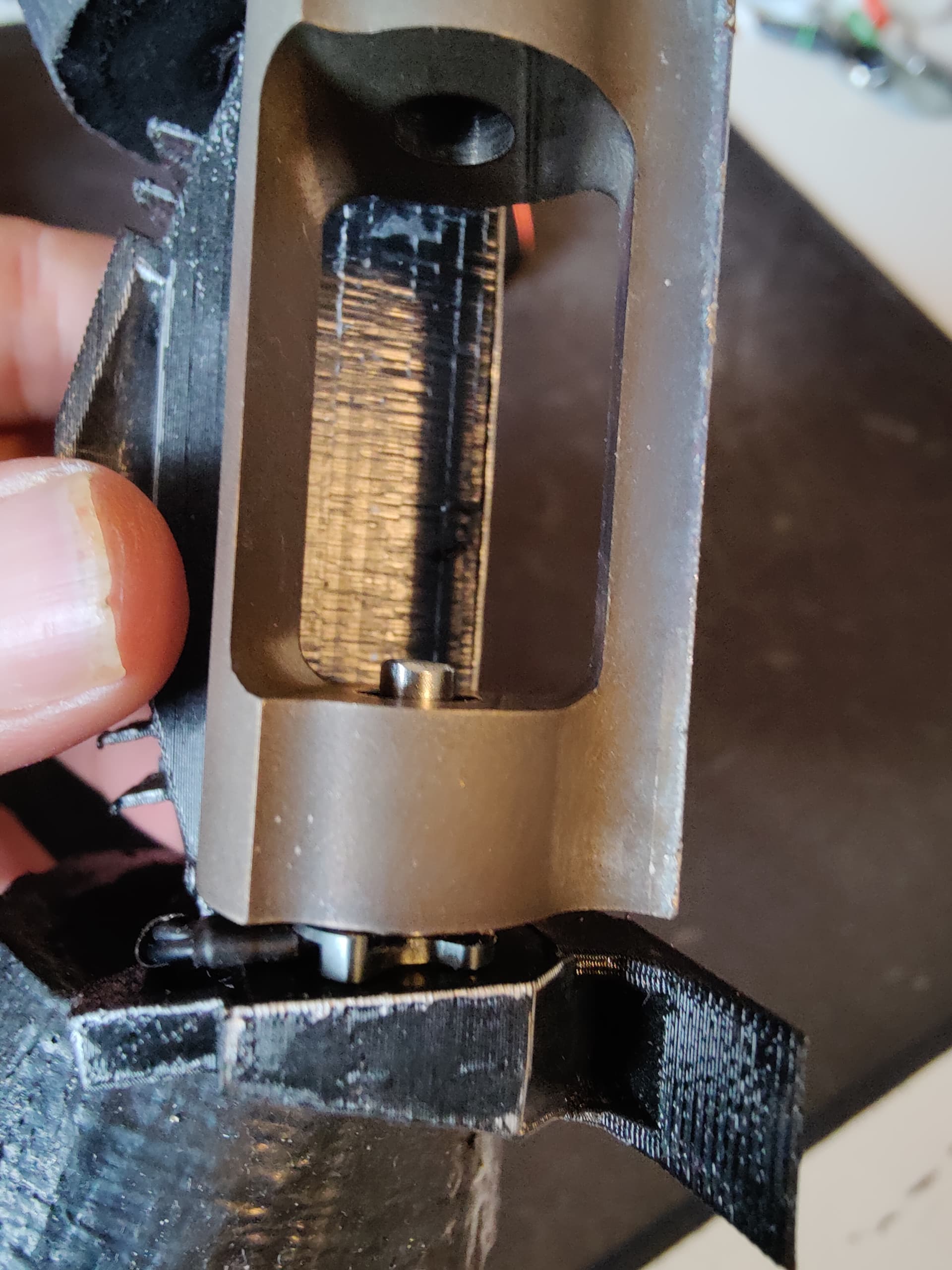
After stripping the motor and popping the bearings out I realised that the bearing cups were exactly 5 mm and between them the aluminum flange was a fair bit under 4mm. I rummaged in my parts box and found some old m4/5mm shoulder bolts and a loose plan began to formulate
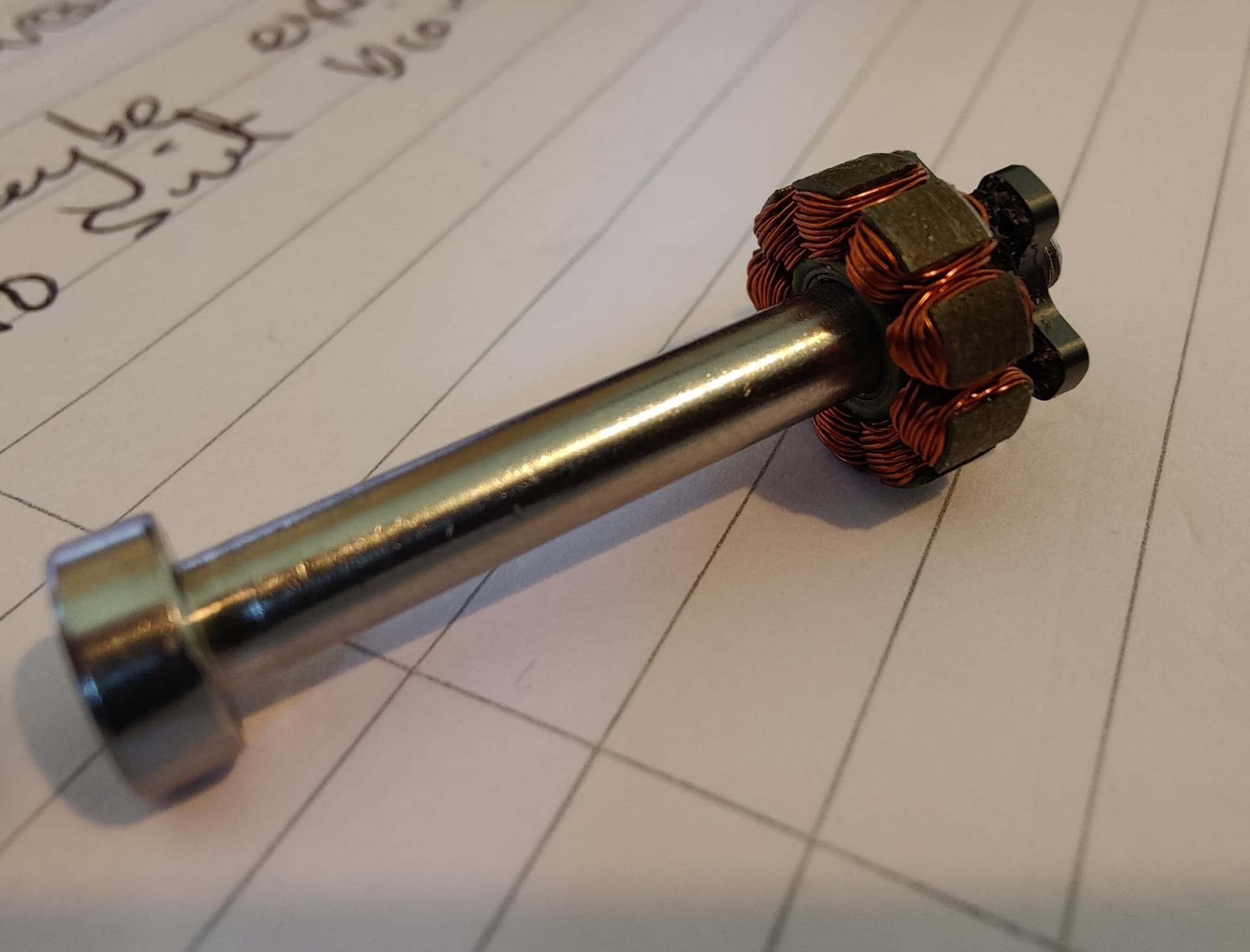
I tapped the aluminum ridge with m4 threads and threaded the shoulder bolt in until the shaft sat snug in the bearing cup. All seemed solid and concentric/straight!
Happy with how the shoulder bolt fitted I proceeded to epoxy the threads and first millimeter of the shaft and refit it. I then packed out the rear bearing cup with epoxy around the threaded portion of the shoulder bolt and once set I then cut down the shaft
Once this was done I the cut the magnet ring off the bell of the motor
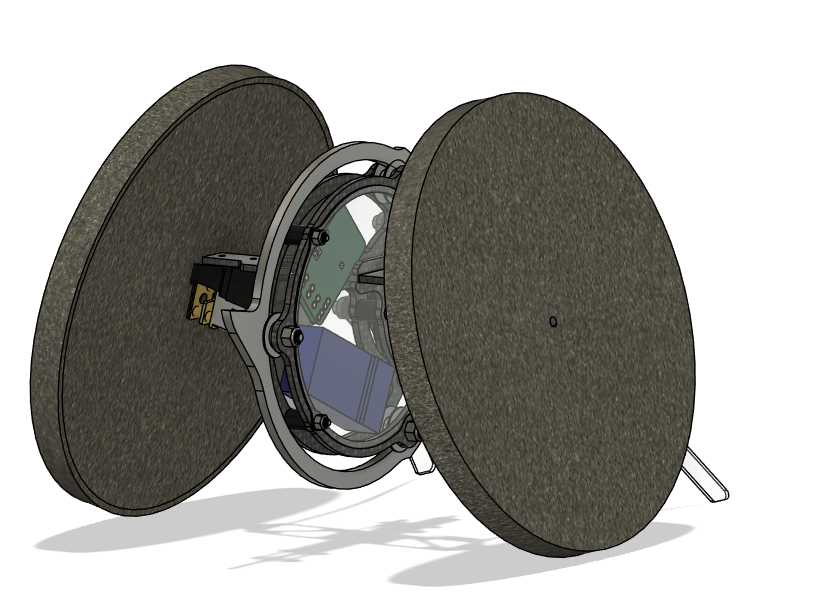
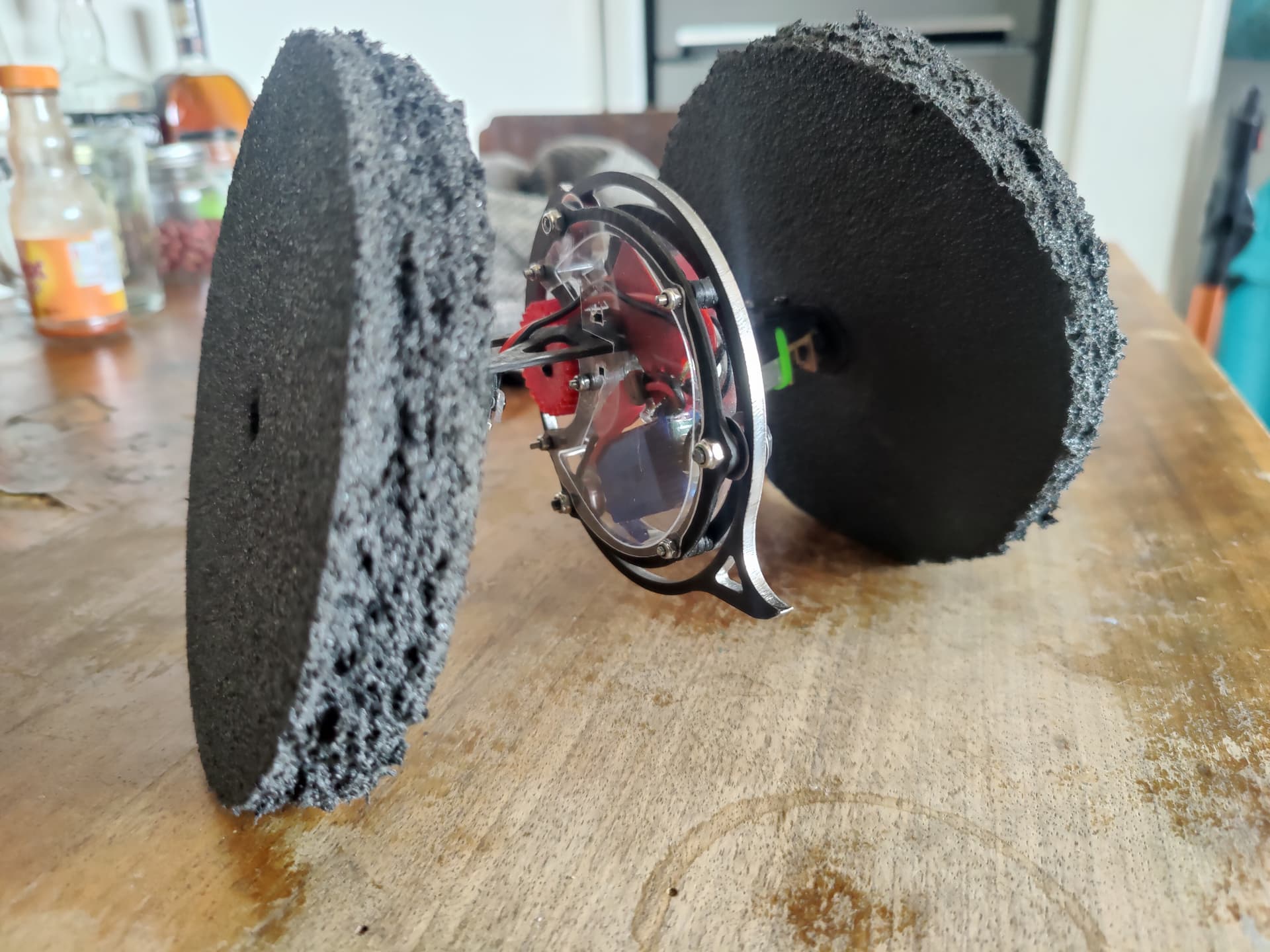
I then designed and printed a spacer to fill the space within the weapon that the motor bell would have occupied and to contain some bearings. And press fitted this along with the mag ring back into the weapon and reassembled.
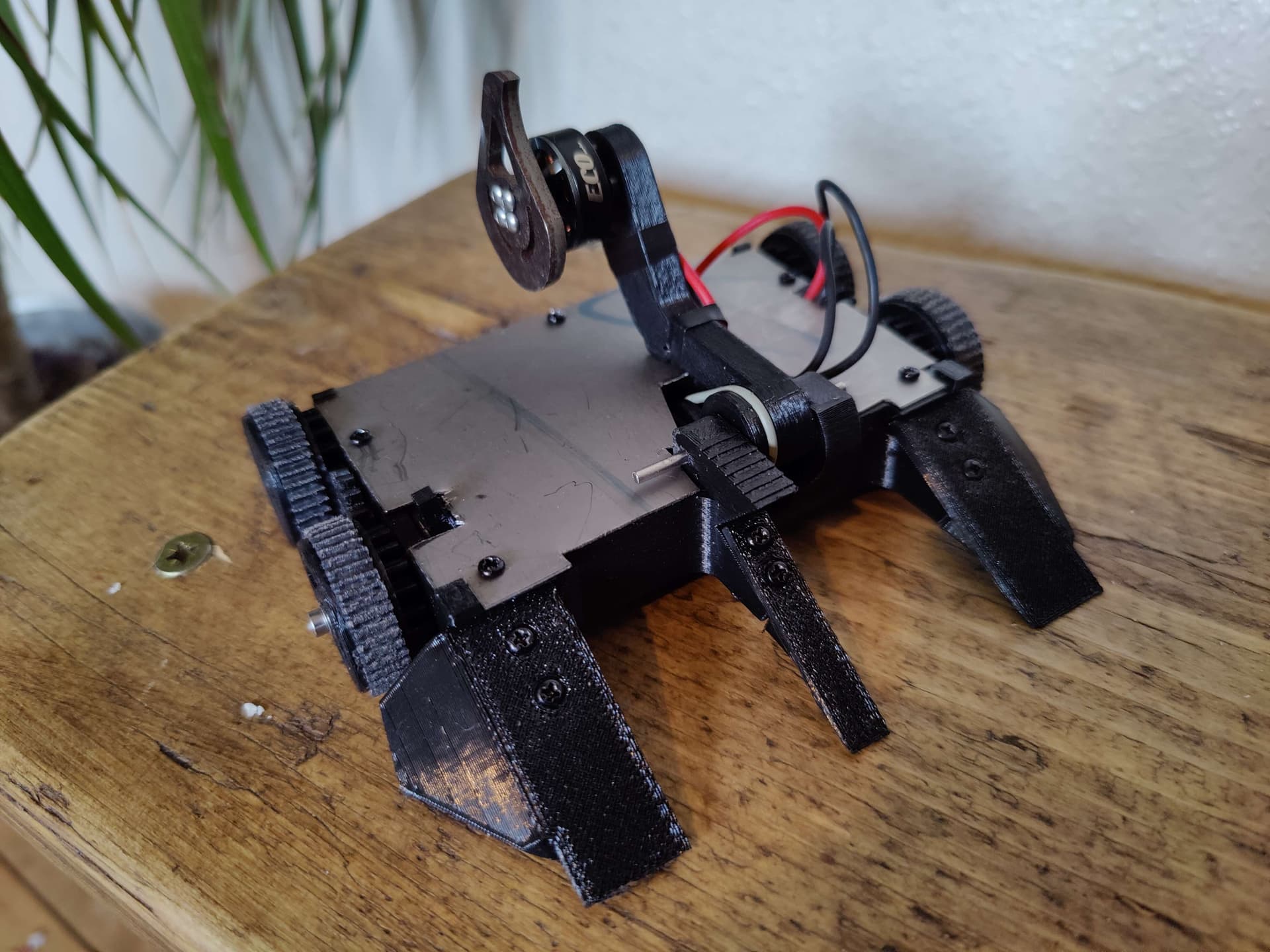
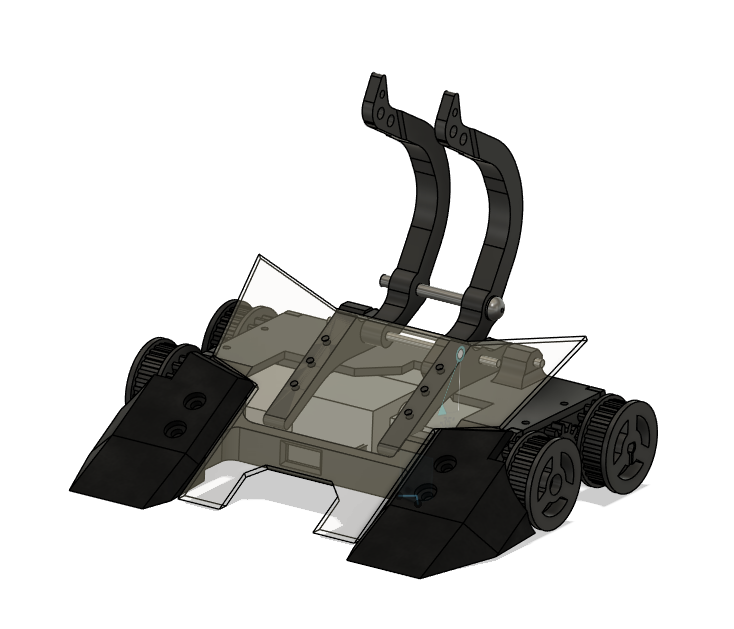
And voila! GetGot!'s drum is now running on a 5mm stainless steel deadshaft/hub motor set up.
5mm is a bit overkill, but what made sense for the fabrication. Stainless isn’t the best, a hardened steel would have been nicer but should be more than adequate for 150g.
This did put the robot a little over weight (it was 149.5g with the stock motor set up) - so lots of small weight loss tweaks were required. Shortening bolts, trimming excess everywhere I could find. I even attacked the insides of the lid pretty aggressively 
But all these tweaks paid off and it’s actually marginally lighter now than before!
I’m really happy with how this process worked out, doing small technical changes was really fun and I’m hopeful this should eliminate the biggest flaw in the robot 
It spins up just fine, exactly like it did before - but I’ve yet to get any real impact testing done with it tho