Thought I’d try some TPU and PLA-ST and actually finish an ant for one of our events for once.
Before the event:


After he was paste.
Thought I’d try some TPU and PLA-ST and actually finish an ant for one of our events for once.
Before the event:
After paste: (lost all tyres, weapon mech ripped off, but servo and all 4 drive motors still work!)
Also featherweight for scale!
look at this little lad, he is just vibing.
Never Speak to me or my Grandson ever again.
What a cute wee crab lad! Love it.
Do wonder if having your wheels exposed at the front was perhaps asking for your tires to be sniped tho? ![]()
Could you extend the wheel guards forwards and round to cover the front and act as feeder wedglets to get people up onto the lifter maybe?
Great wee build regardless though! - love seeing robots span multiple weight classes
Yeee, it’s good shout.
I was rushing out the cad but original plan was front wej off the wheel guards with some forks off it to stabilise the lifts too, lacking either meant both floppy lifts and a lot of abuse from a v scary horizontal ![]()
Hi Joe,
Great build,
how heavy is this? have you tried putting a gun on it? Maybe a taser would be a good idea!
This guy. I like his suggestions.
I always like seeing the big crab/little crab stacks, going back to the ant/beetle/fev Crabsolutely Clawfuls.
shout, I need to stack all 3 grab crabs if they’re ever all in one piece at the same time.
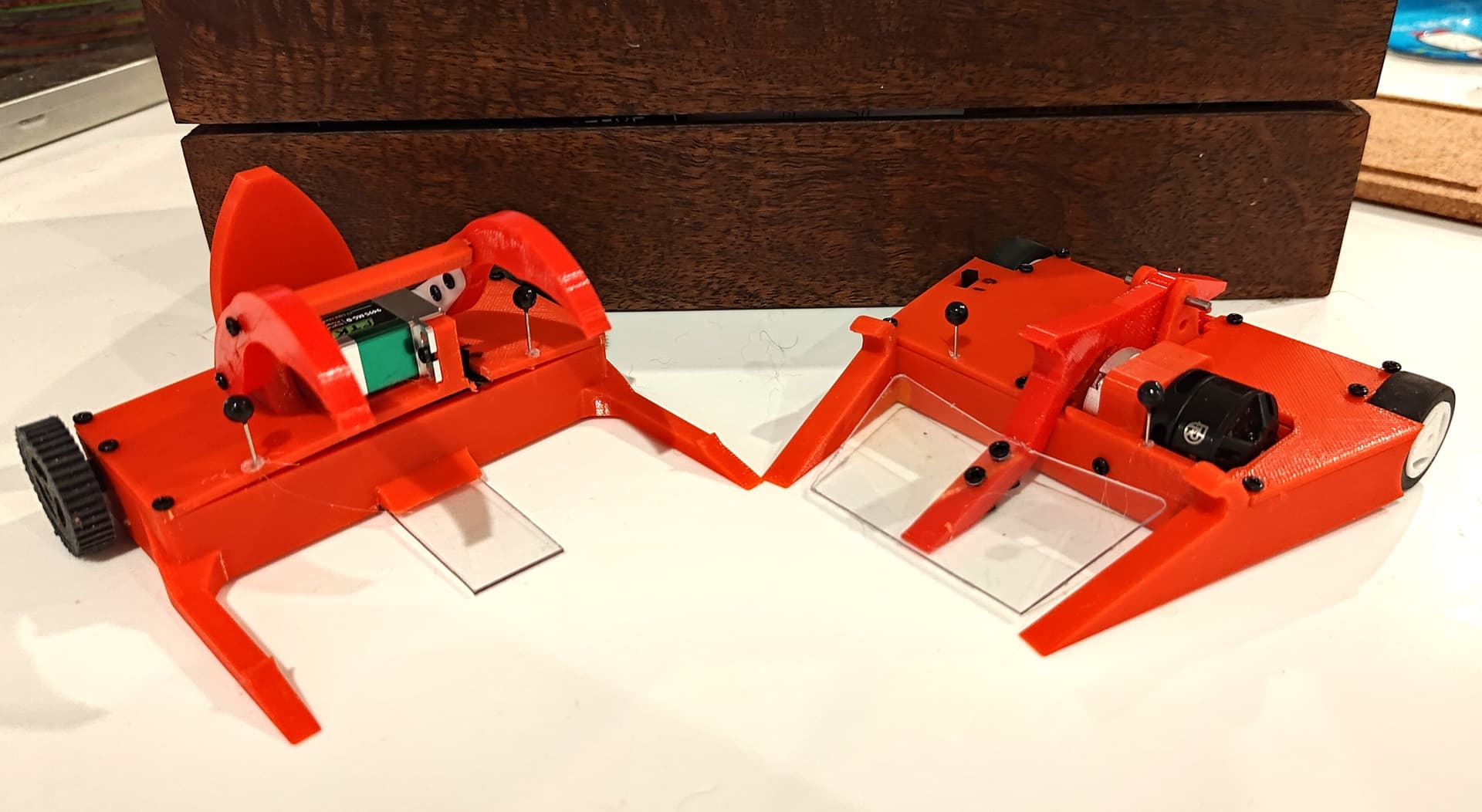
made some ants for GROCS this weekend both with the aim of getting some brushless gearboxes in ants!
Left: ![]() Wallop Scallop - Cattywampus inspired grab & deathroll tail on 16mm brushless gearbox
Wallop Scallop - Cattywampus inspired grab & deathroll tail on 16mm brushless gearbox
Right: ![]() Fling Prawn - 22mm brushless flipper
Fling Prawn - 22mm brushless flipper
yes more brushless antweight mechanism! loving them, the 22mm sounds quite crazy!
How well does the brushless and gear box flip?
I have seen a few popping up, but they never seem to go beyond a big servo level performance wise?
It was too fast to be honest, needed more reduction to work well, but it did flip things. Servos are so power dense at ant it’s definitely the much better move!
I think I’m in love with the pins for eyes!
That ha been my mental thought - servos are pretty much optimised for that role anyway. But it would still be nice to get a good flip at ant level
Enjoying 3D printing more at the moment, and was heading along to Bristol Uni ants so made a new grab and lift bot - all the gears!
That’s, what, 6? What will you name this new life? Very impressive gears, my only critique is that the grabber part doesn’t look all that crab like and a little flimsy. Who am I to judge though?
I love the grab and lift, I think I keep making my mechanisms way too chunky looking at this!
Is it motor driven or servo driven?
It’s powered by a 16mm repeat brushless gearmotor because I love oversized gearmotors in my bots, it’s definitely the wrong choice!
I think a servo would be well suited or I’ve seen 100rpm n20s/n10s have plenty of power too, ant physics are weird ![]() - this is my fave grab&lift ant of now, and it’s running a 100rpm n10 and looks like quite small mod gears (and some nice linkages) but they’re definitely a bit thicker than mine.
- this is my fave grab&lift ant of now, and it’s running a 100rpm n10 and looks like quite small mod gears (and some nice linkages) but they’re definitely a bit thicker than mine.
I did 5mm thick mod1.2 gears, I think these would have been fine with a servo or n10, but stalling that guy out ate the gears pretty promptly. What size mod do you do for your ant weapons? The drive is mod1.0.
it being the night before the event I didn’t have time for a major redesign so made a flipper linkage version with more material around the grub screw connected to the weapon motor shaft
I’ve been using MOD2 gears in my ant weapons, and 1.5’s for drive for quite a while but I purposely design them to mesh very poorly in the drivetrains so bits of arena debris don’t stall my drives out, and big teeth really help with this.
MOD2 has always felt like overkill and its really hard to package comparatively but my failures tends to be stall torque, stripping the bores or bending mounts as opposed to teeth now which is nice
Brushless lifter looks incredible though, I bet it’s got some power behind it!