It all started when I was super ill over December incidentally watching loads of old seasons of Battlebots and realised i’f not seen any big wheeled ant’s. The 4" cube rule was still a thing back then , but some quick sketches sugested it would be possible to make a 4" cubed vert spinner. Having never built anything more complex than a front flipper before, my deseised mind set to work .
The hard part was surprisingly hard, figuring out how to transfer power and signals from one side of the bot to another, as well as making a frame stong enough to absorb hits without gnerally letting the side down. (This last part was only a partial success, more on that in part 2).
Fast forward a month and i’d figured out the answer: Needle bearings and a hollow metal pipe, attached to the chassis in a couple of points. Then offset the drive motor and use various cogs to directly power the weapon. Easy right ? Well. another month of iteration and i’d got a working mockup, based around this sort of design - with a lot of help answering stupid questions from OOTA, Joe, Hop, Rob and many many more. Did i mention this the first foray into brushles motors too? well. hello ![]()
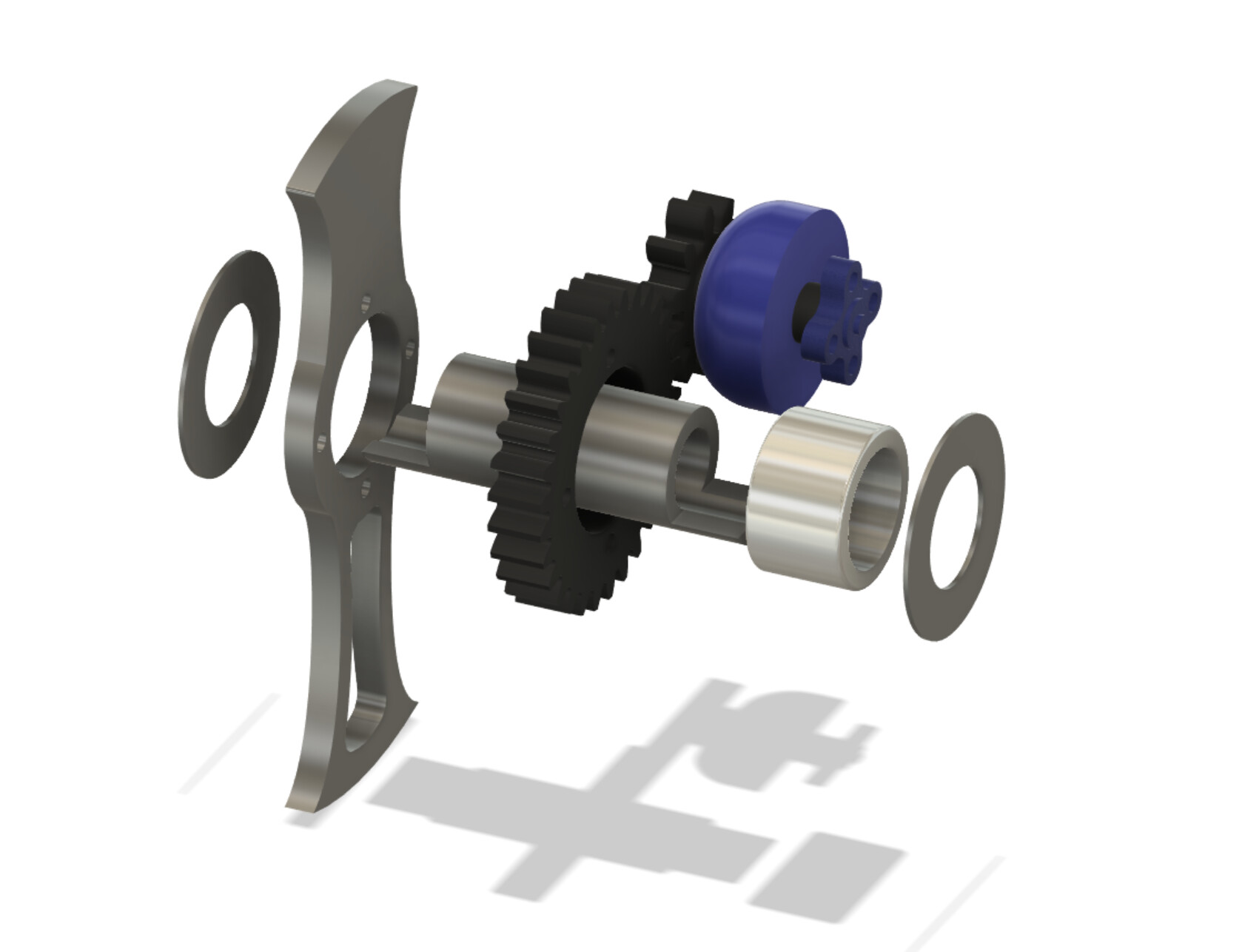
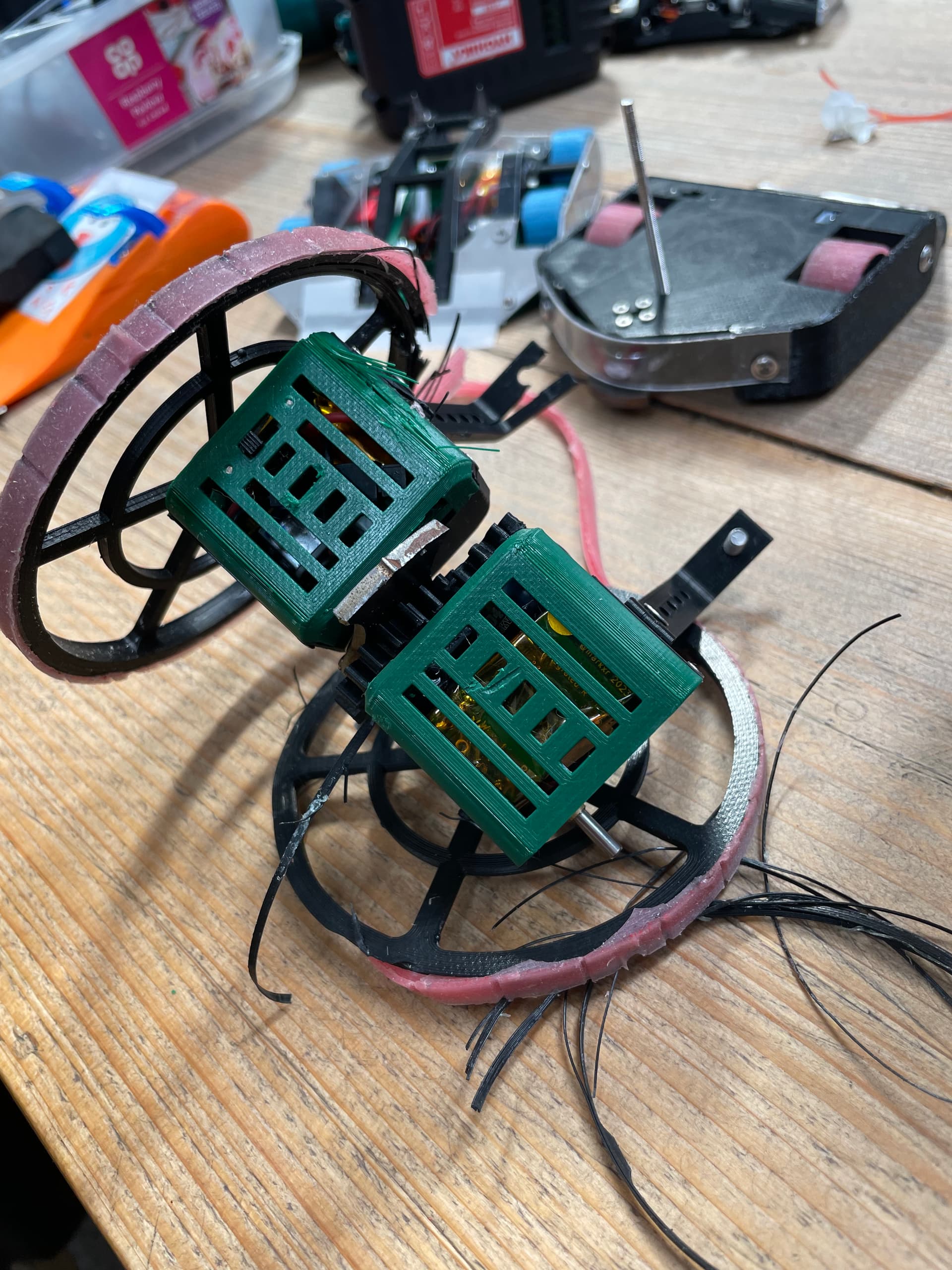
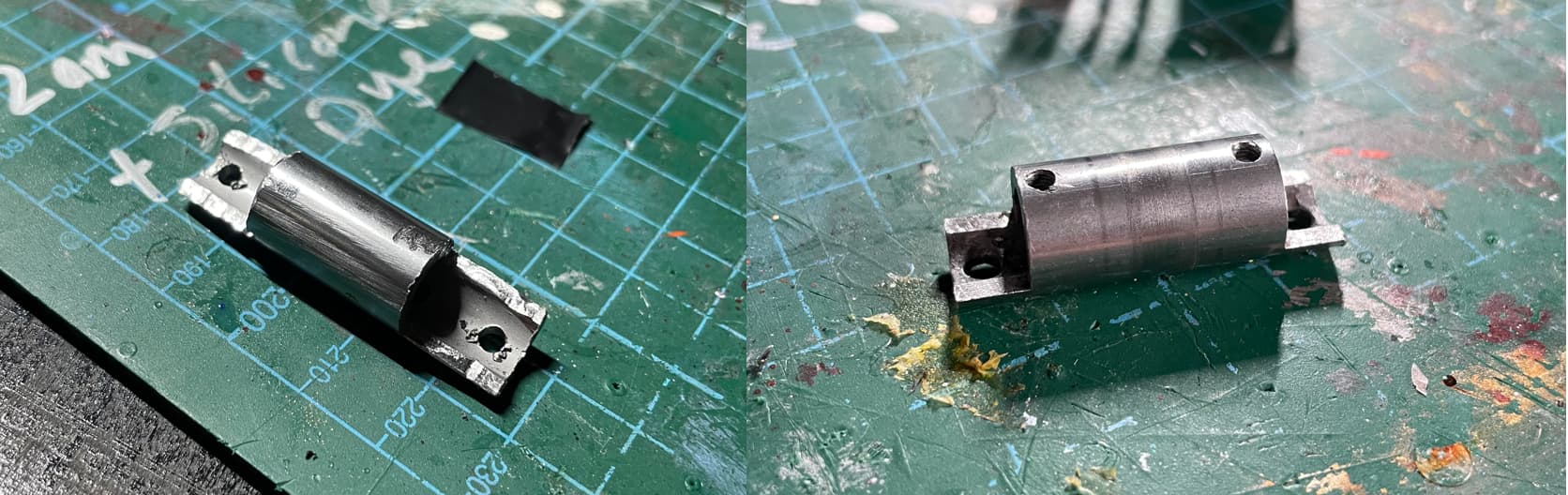
Outer shim washers stop the PLA melting, 12/16mm needle bearing holds the weapon and weapon cog, sandwiched together with horizontal grub screws, driven by a 1404 3kv brushless motor with a reversible BBB Drive motor, so the weapon can spin both ways. All this sits on a steel, then later Aluminum pipe.

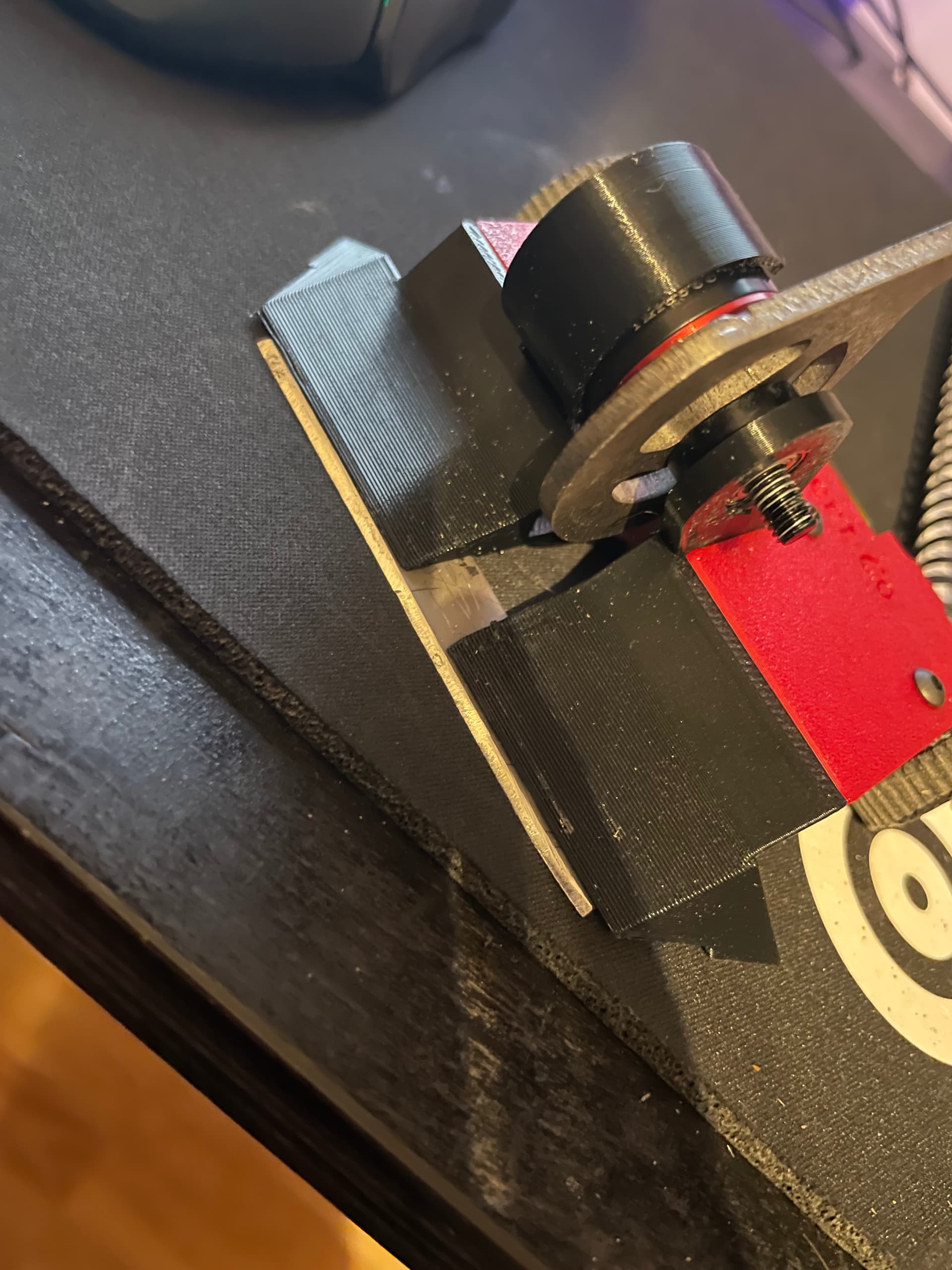
Herein lies another issue. Making the pipe fit was impossible in my shed, so over to the East Essex Hackspace we go and enlisted the help of John, the local Old fella who can use the lathe and digital mill, who knocked one up in a jiffy after a few sarcastic comments about my 0.25mm tolerances being a bit sloppy ![]()

Spot the difference:
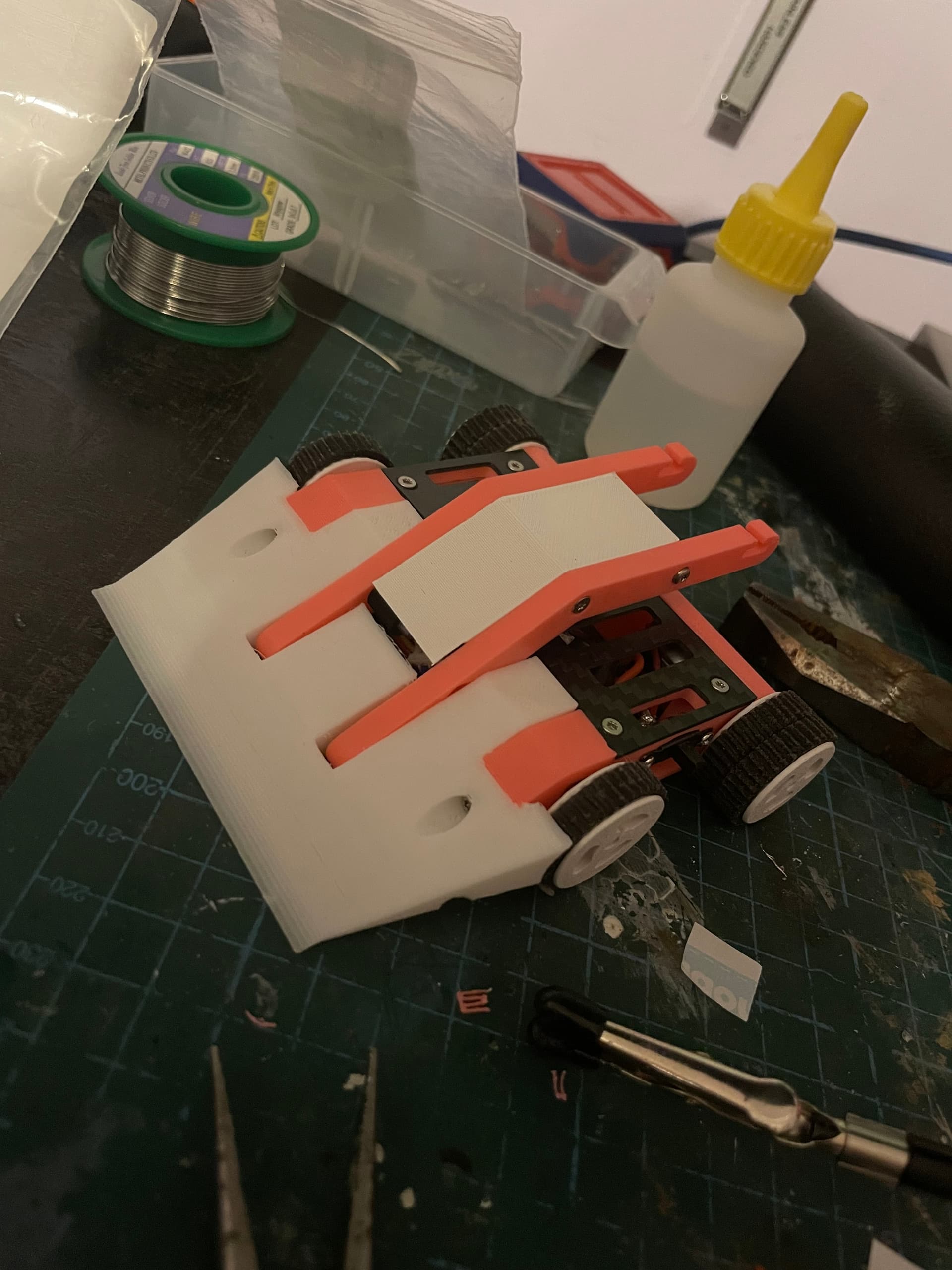
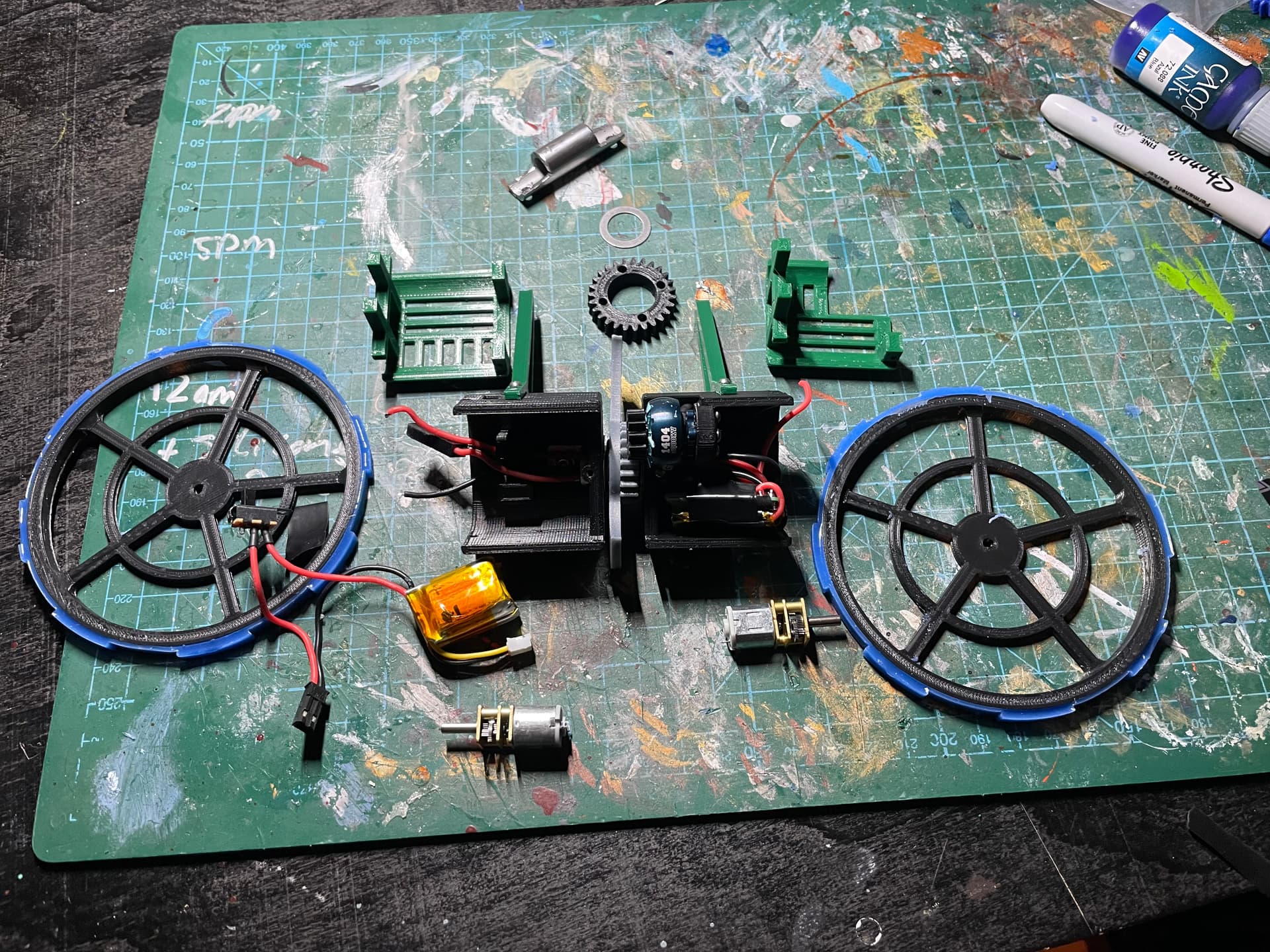
The rest of the chassis is a simple box with battery on one side and Mk2 malenki on the other. Simple enough. it took a few iterations of ebay ordering to get some decent 180mah 1s batteries to solder up for the power side and a few similar motor iterations to settle on 100rpm N10’s. power flows through the middle to the malenki and drive comes back to the N10. A JST allows for the battery to be removed for ‘safety’ though due to space I have to un-solder at least one motor to get the weapon assembly appart.
The next challenge was wheels - first tests with 3 part TPU/PLA/Stud wheels were wildly unsucessful and impossible to control, so more grip’s needed - eventually I settled on casting silicone mixed with paint and cornflour directly onto the PLA-ST hubs, giving nice grippy, and hopefully tough wheel, which is unfortunately a massive target for anything that gets close (more of this in part 2 as well!!)
Finally, the weapon was provided via Hopmeister’s Hardox Services inc. with a 18g light bar, 24g heavy bar and 30g disk making it off Fusion in time. though earlya ssemblies shows i only ahd enough weight was the steel middle for the lighter bar, i figured it’s better to have hardox and not use it imemdiately and work towards it ![]()
So here we are - it goes together - it makes weight. I’ve got a test box… how does it do ?
Apart from one small problem of newtonian physics kicking in on spin-up and it tipping forward - solvable by adding some weight to the back (bolts on the support legs) - it actually, finally, improbably works. Up to this point it was a perfect 100mm cube, but as the BBB team just ditched the cube rule, i could stick these support weights a bit further back to try to offset a fast spinup. The whoel weapon should get to top theoretical tip speed of ~150mph in under 2 seconds at this point.
There were points in this stupid 3 months journey it nealy went in the bin, but bots like this are a sickness.
Then SCAR finally comes around, and it’s off to the beautiful north to have a scrap. How does it do? Well, i’ll tell you. Tomorrow.