Back story
I’m currently a university student studying at Chichester University. A part of my course was to design and build a combat robot. The weight classes varied depending on the year.
“Spin”
“Spin” was my first combat robot, built during my first year. Having only watched Robot Wars on TV as a kid, I came into the hobby with no experience—just a lot of enthusiasm.
The initial design:
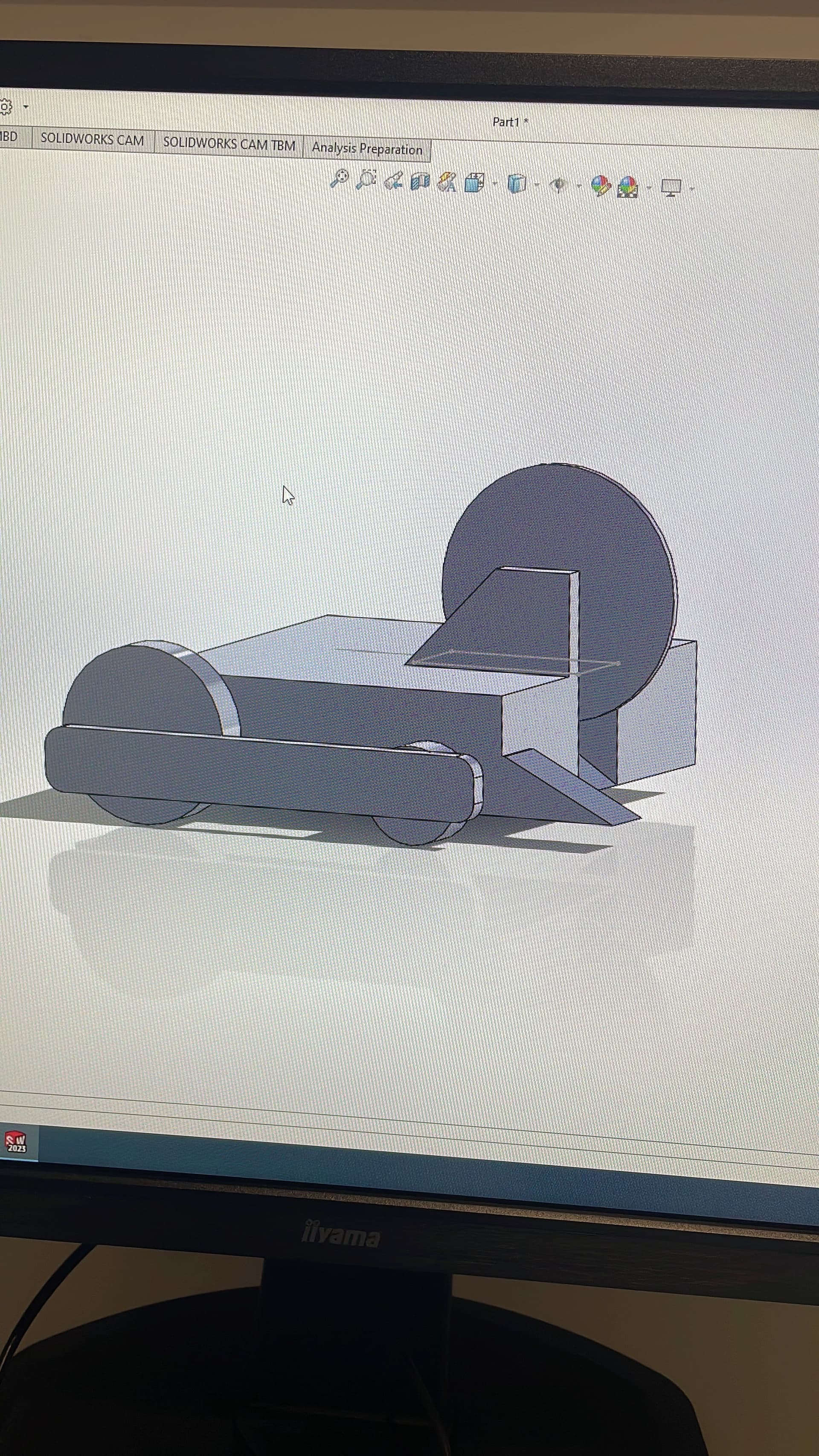
I had no experience with 3D design software, so even learning to use CAD was a major part of the challenge. We decided to go for a 4-wheeled vert spinner that utilises a saw blade.
The final ish design:
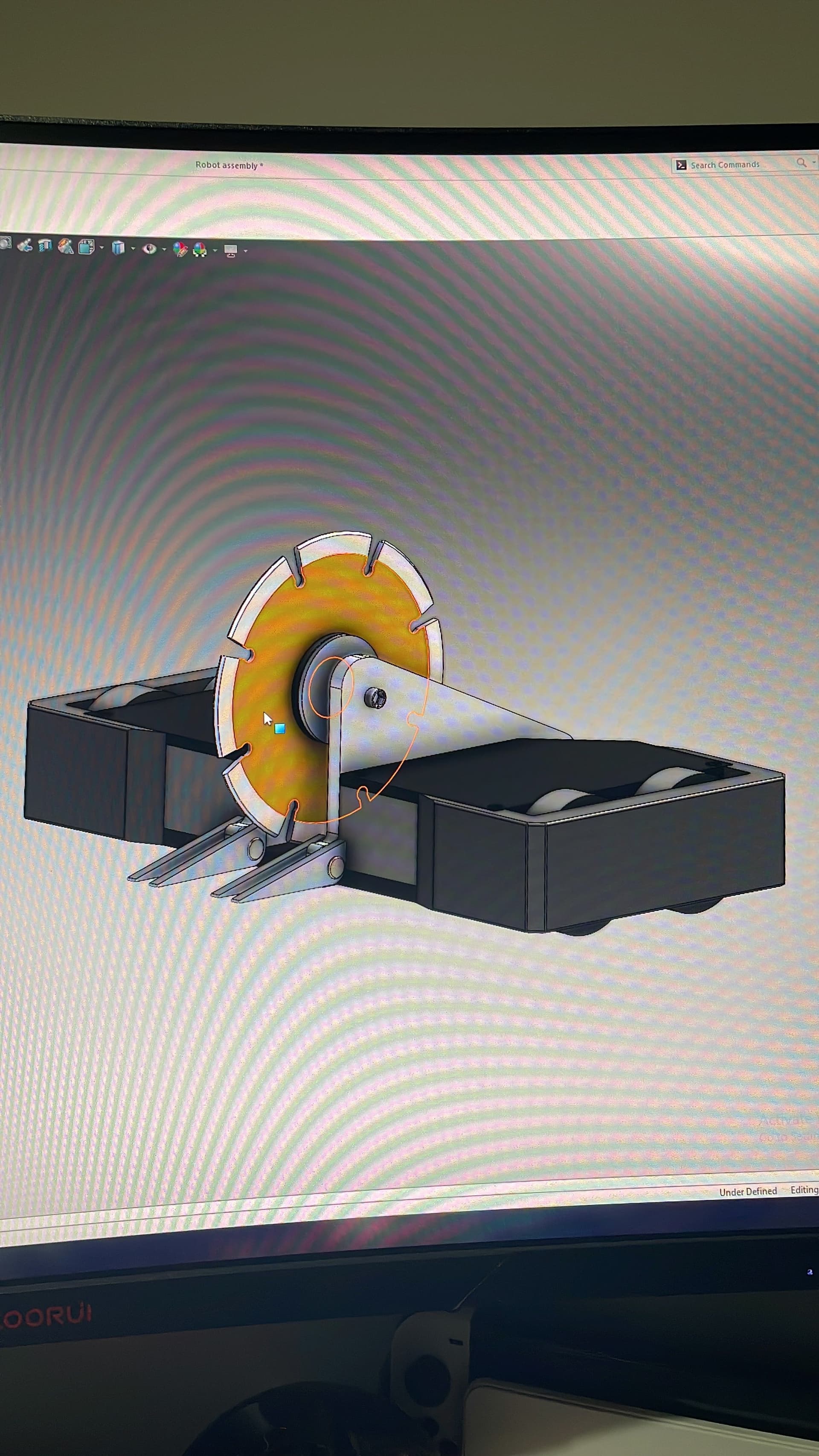
The decision to go for a diamond-tip saw blade was a teammate’s idea, as he believed it would cut through the competition with ease (spoiler: it did not
The body was primarily 3D printed from PLA, with then aluminium bulkheads to attach and support the saw blade and central chassis.
Final Build
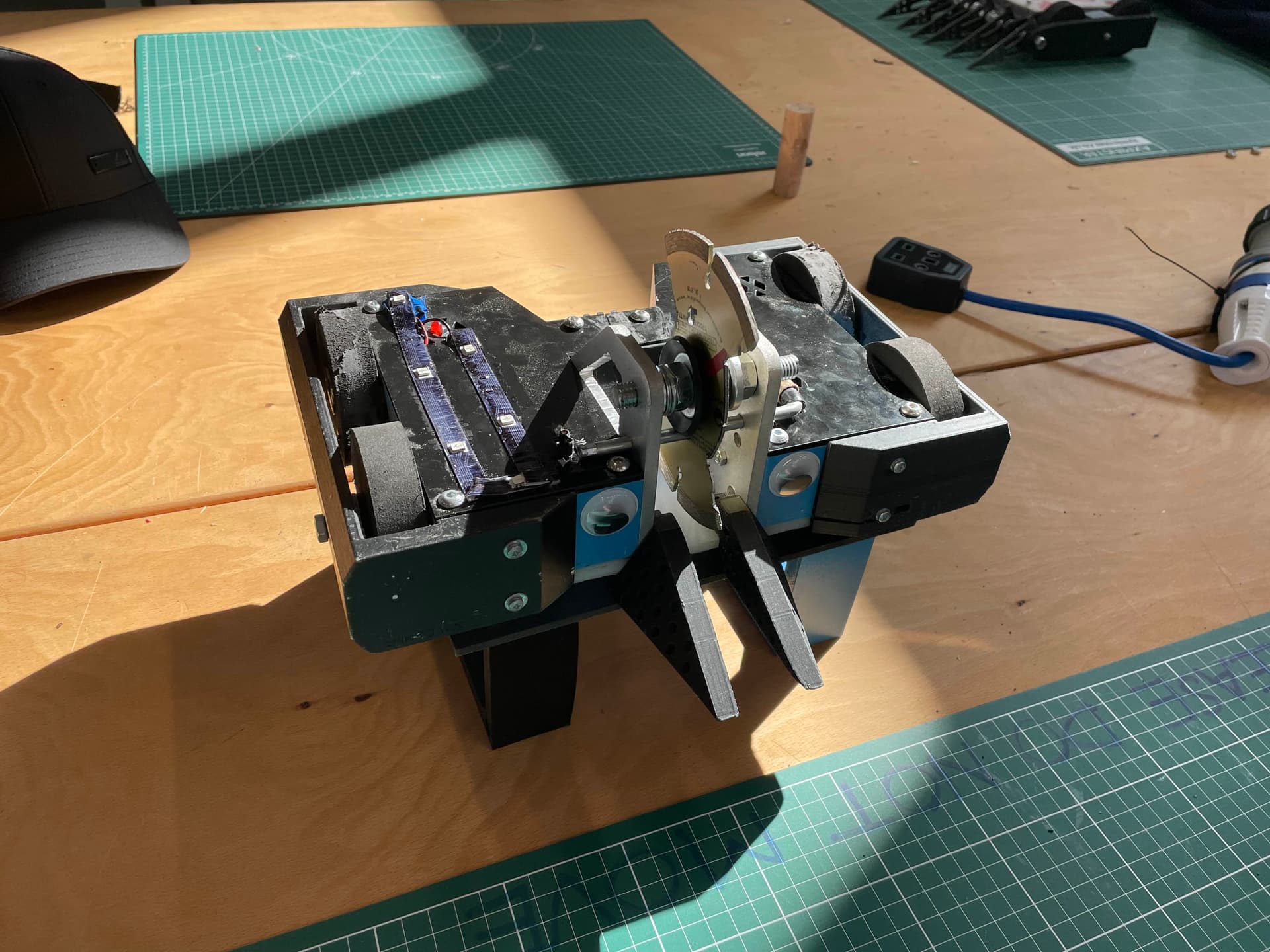
The final build for the Spin project went smoothly, except for the realization that using a brushed motor with a planetary gearbox was a poor decision for a weapon motor in a spinner. The drive performed excellently and contributed to our 2nd place finish in the university competition, where we lost to a ram bot inspired by “Resistance”.
“Galahad”
From the self-disappointment of attempting to build a spinner, I decided that I would build my own robot over the summer. I originally started to design Galahad as a bit of a stress reliever during exam period.
Galahad’s original design was based off of US bots such as “Lynx”. I liked the overall look, and with the experience of a 4-wheeled drive bot previously, I wanted to stick with that.
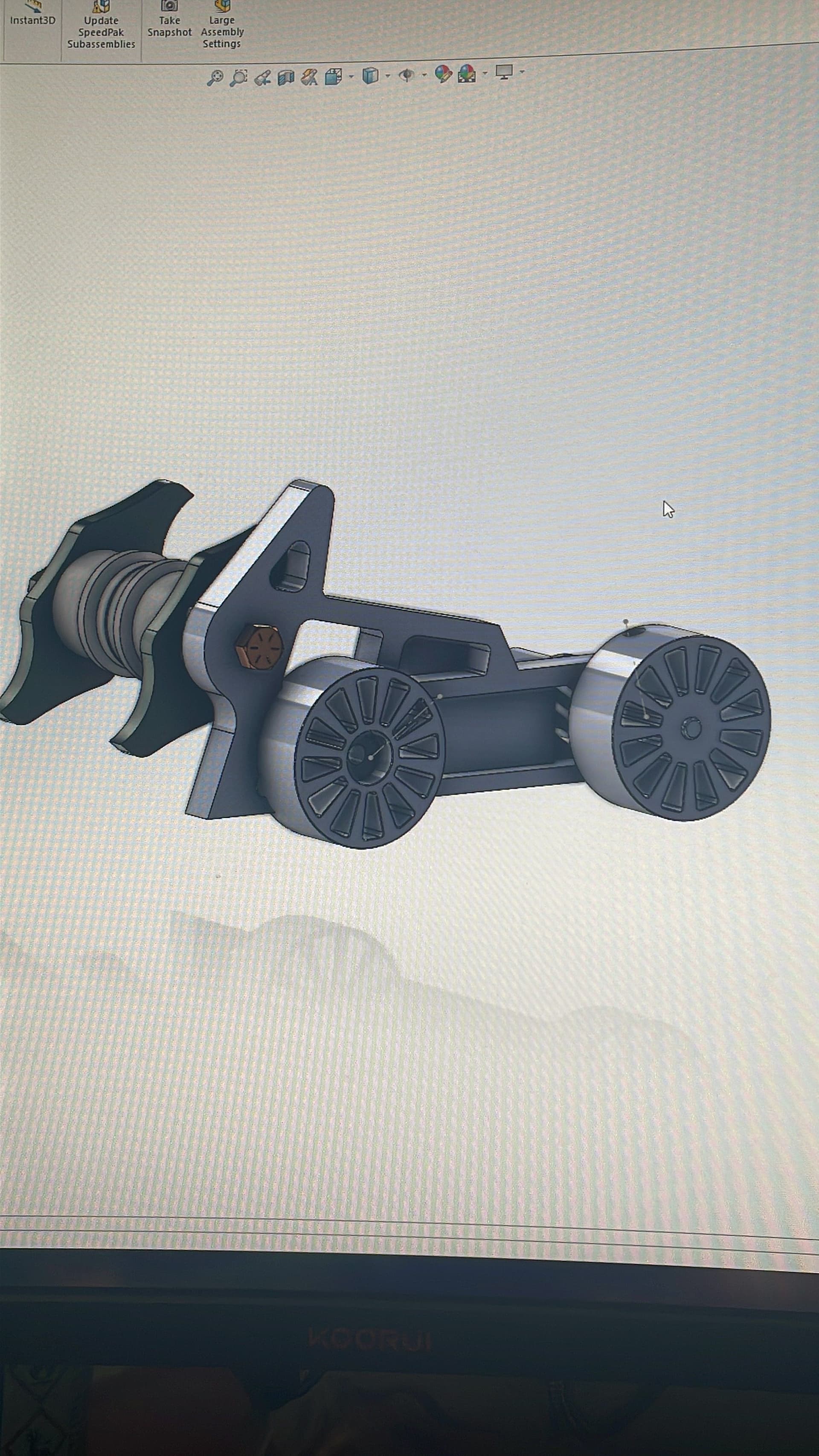
The plan was to use a Peter bar kit as they were easier to get that making a full on egg beater bar. It also allowed me to modify parts of it later down the line.
The plan was to use a Peter bar kit as they were easier to get than making a full-on egg beater bar. It also allowed me to modify parts of it later down the line.
The wheels were originally designed for LEGO tyres, but during testing I didn’t feel like I got sufficient grip.

This was a rough test print of the original CAD design for Galahad printed from PLA. This was also used to do a little test drive.
Around this time I got introduced to the wonderful material that is TPU and how it is used for chassis, armour, etc., in robots.
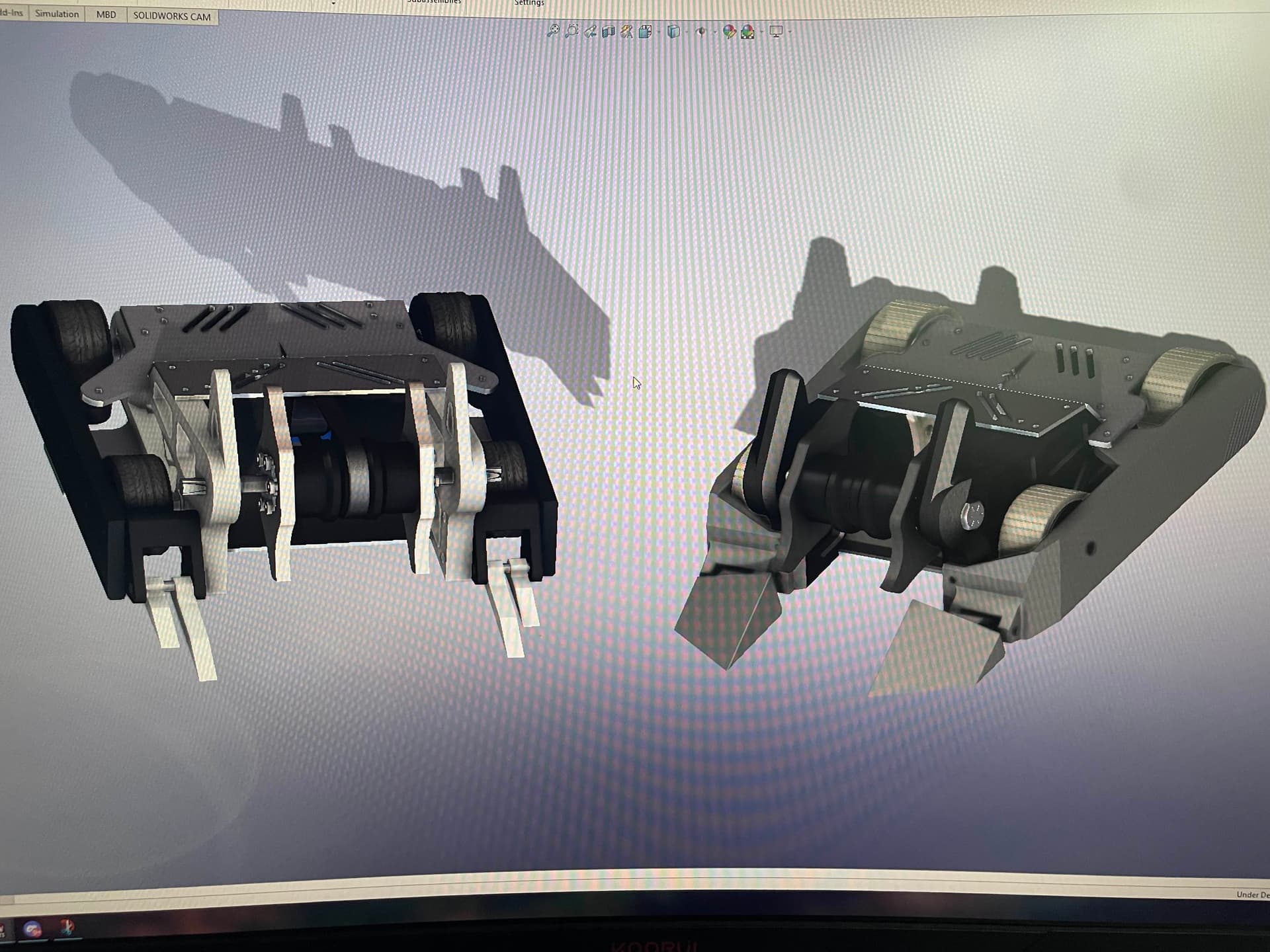
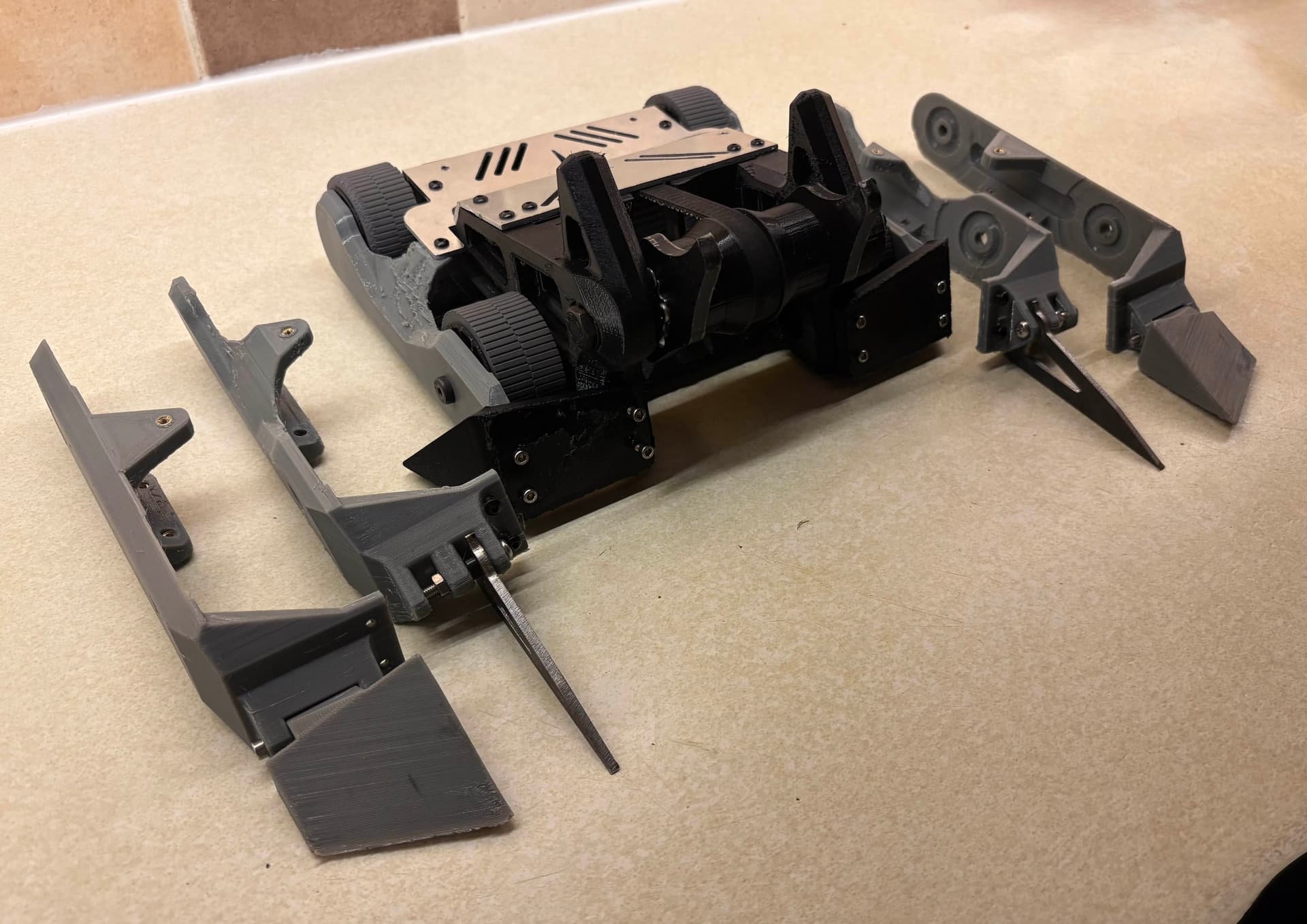
From that, I updated the design to integrate TPU and a couple of upgrades that included interchangeable front attachments, full brushless drive, MARS tyres for more grip.
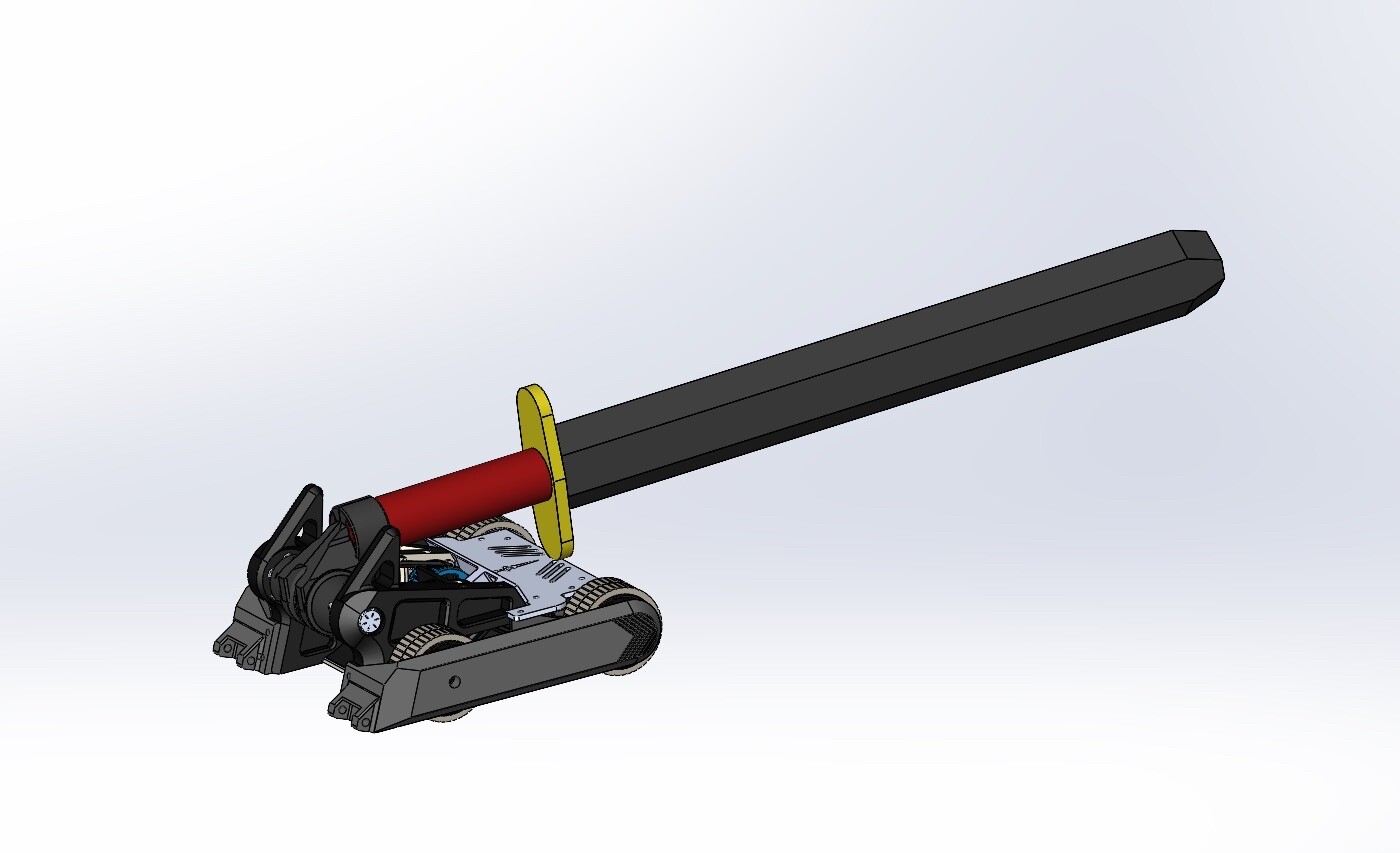
Oh, and also the FOAM SWORD!!!
Build
The build was quite easy as it primarily consisted of a lot of 3D printing. A few bits were laser cut out; this was mainly the aluminium plates on the top of Galahad.
This photo was taken in September, and my first planned event was in February. I ended up slowly upgrading Galahad throughout those months between as I started work on my 2nd year uni bot.
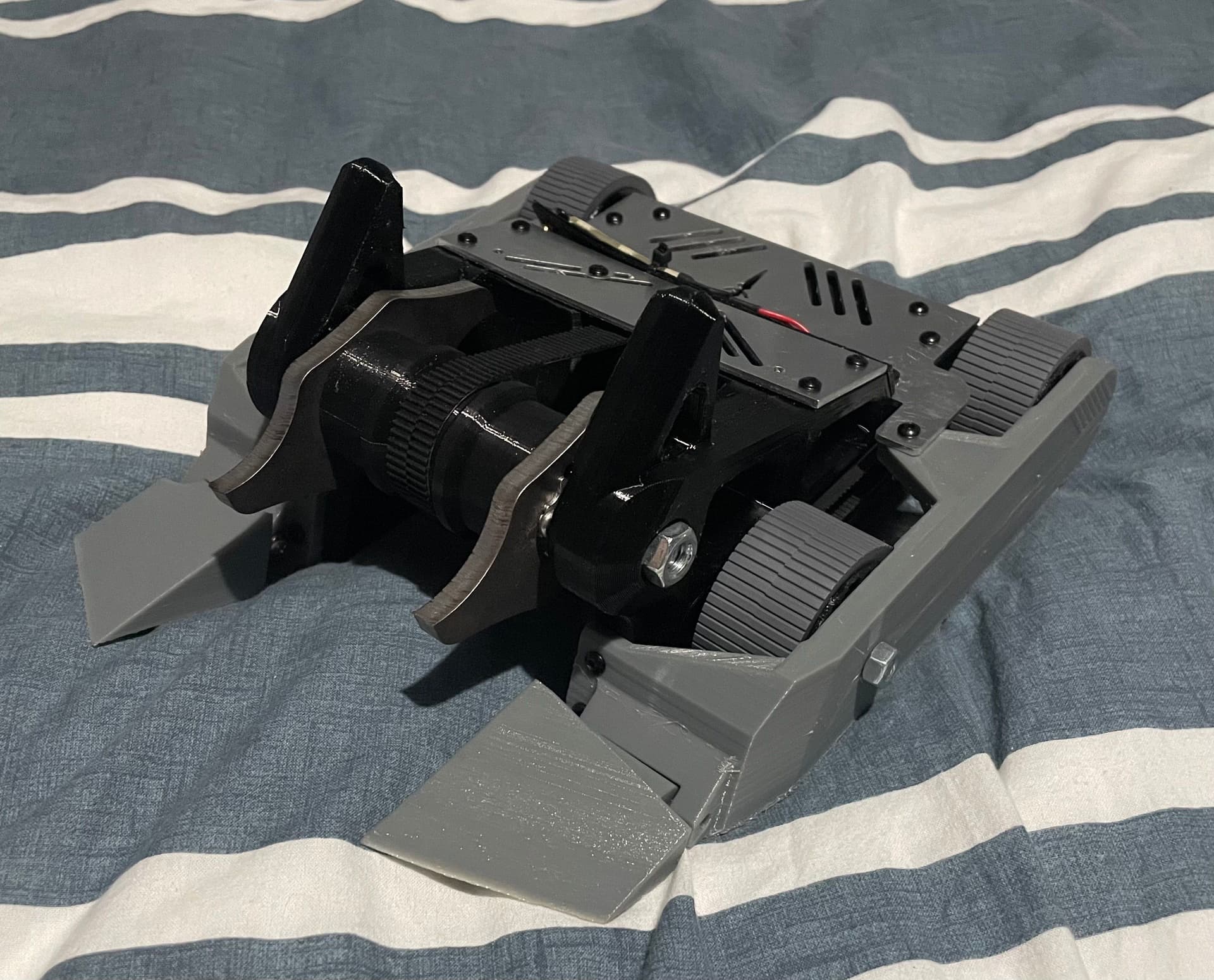
Chichester 2025
This was Galahad the night before my first competition at Chichester. I learned a lot at the competition. After facing off against robots Kult and Frenzy, I found out that threaded inserts in TPU are as much use as wet paper, as my armour pieces kept flying off after a hit.
The highlight of the event was fighting Bop! with the foam sword attachment. Although I didn’t win, I had a great time and hope to do it again.
BBB Brawl 2025
Just over a week later from the Chichester event, I took part in the student competition at BBB Brawl alongside “Whirlpool” (another one of Chichester Uni bots). I had to reprint the majority of the chassis and armour as not much was left after Chichester
Full Photo library
A full Photo library of Galahad from start to finish can be found here:
Photo Library
Galahad version 2.0
Bit of a time jump to now, where I have just started to work on the new version of Galahad after finishing my 2nd year uni robot.

So this new version of Galahad has a few upgrades that I’ll explain at a later date when the final version is completed. But what I’ll say for now is that the foam sword has had a big upgrade
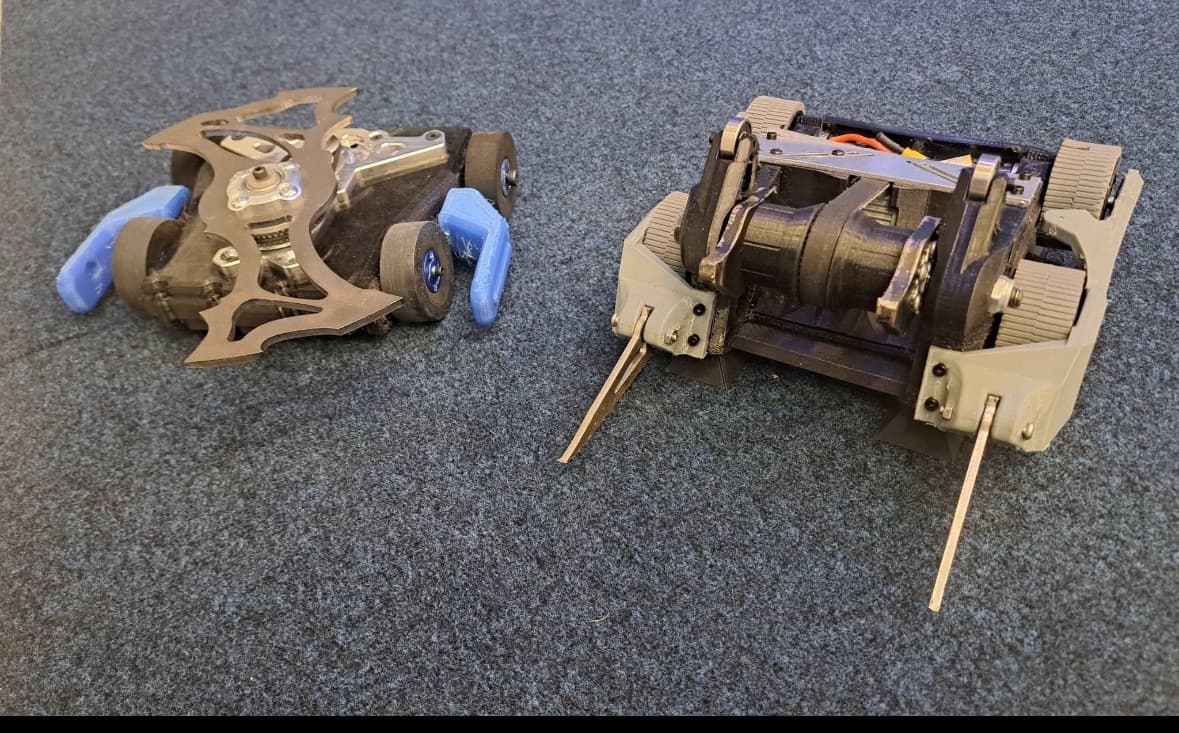
Lamorak:
For my 2nd year uni robot, we were tasked to build Hobbyweights (5.4 kg). As I had previously built two spinners, I decided against building another.
I was part of Team Ablaze during the Fight Fest competitions up in Sheffield last year, where I got up close to many amazing robots and designs. But there was one type that I thought I would like to try in my 2nd year—and that was a suplex flipper-type robot.
Basic model
During the making of this basic model, and with restrictions on budget and trying to stick to my main goal for my 2nd year project—which was an easy robot that I could manufacture quickly, giving me the most time to test and optimise before the competition—I decided against the suplex flipper.
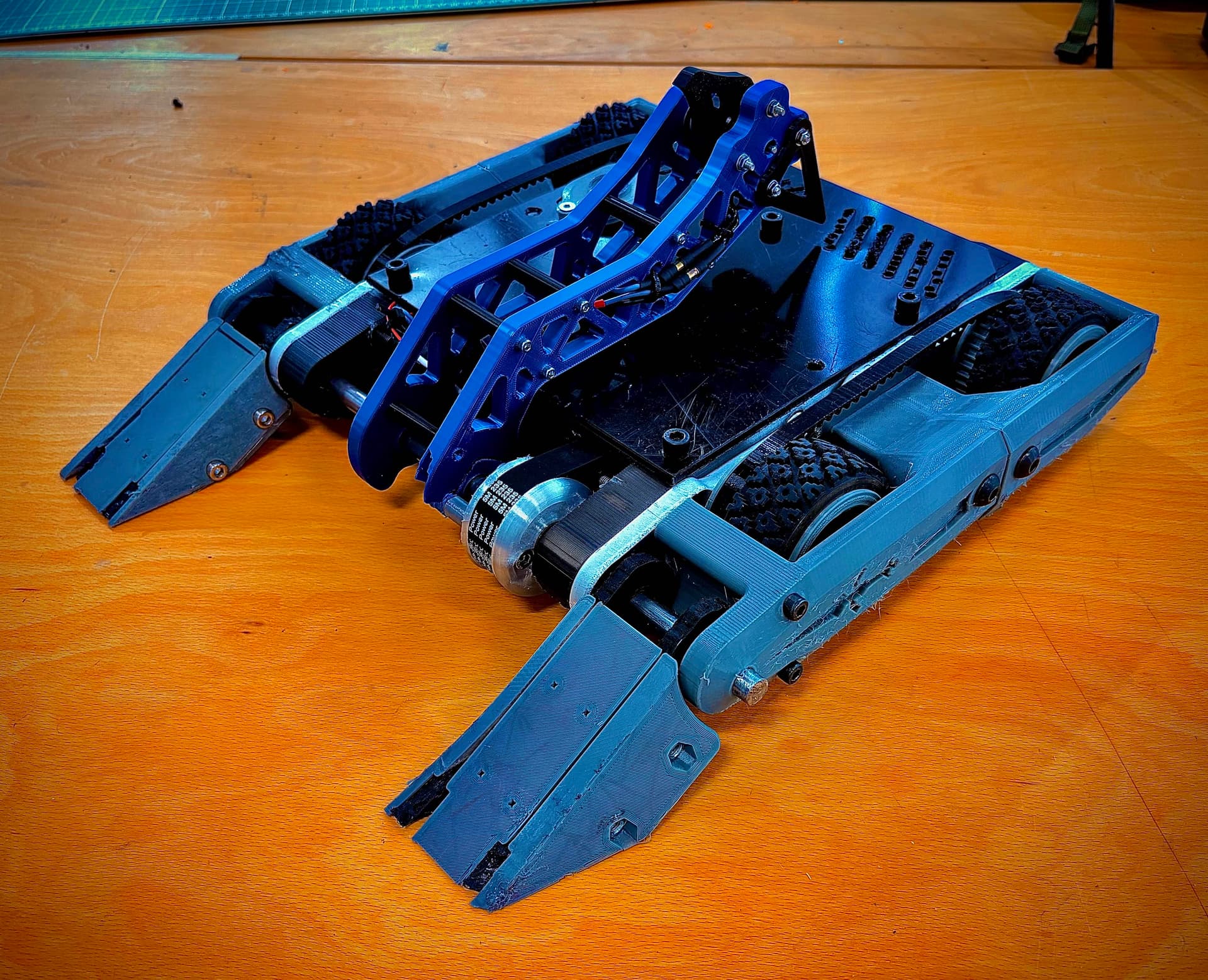
Instead, I opted for a dual-action flipper similar to robots such as “Sewer Snake” and “Tormenta”. I then based the chassis shape on my lecturer’s bot “Revolt”.
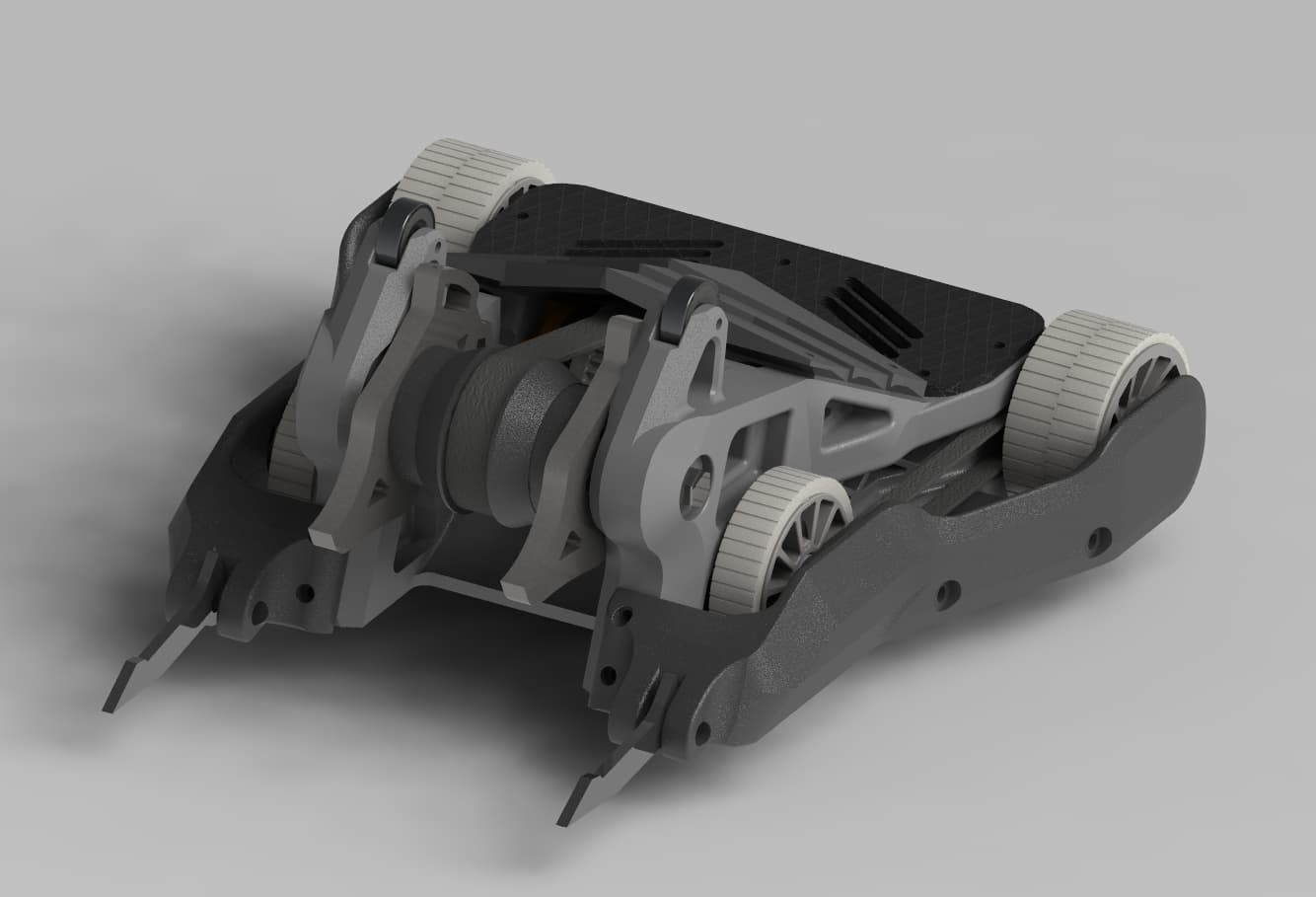
CAD
The overall chassis is printed from TPU but then has aluminium rods going through it to two aluminium bulkheads on either side to add stiffness.
The front wedge was to be cut from Hardox and then welded onto some mounting brackets. The side armour was also TPU, and at the time the idea was also to be able to swap it out for a chunk of HDPE if needed.
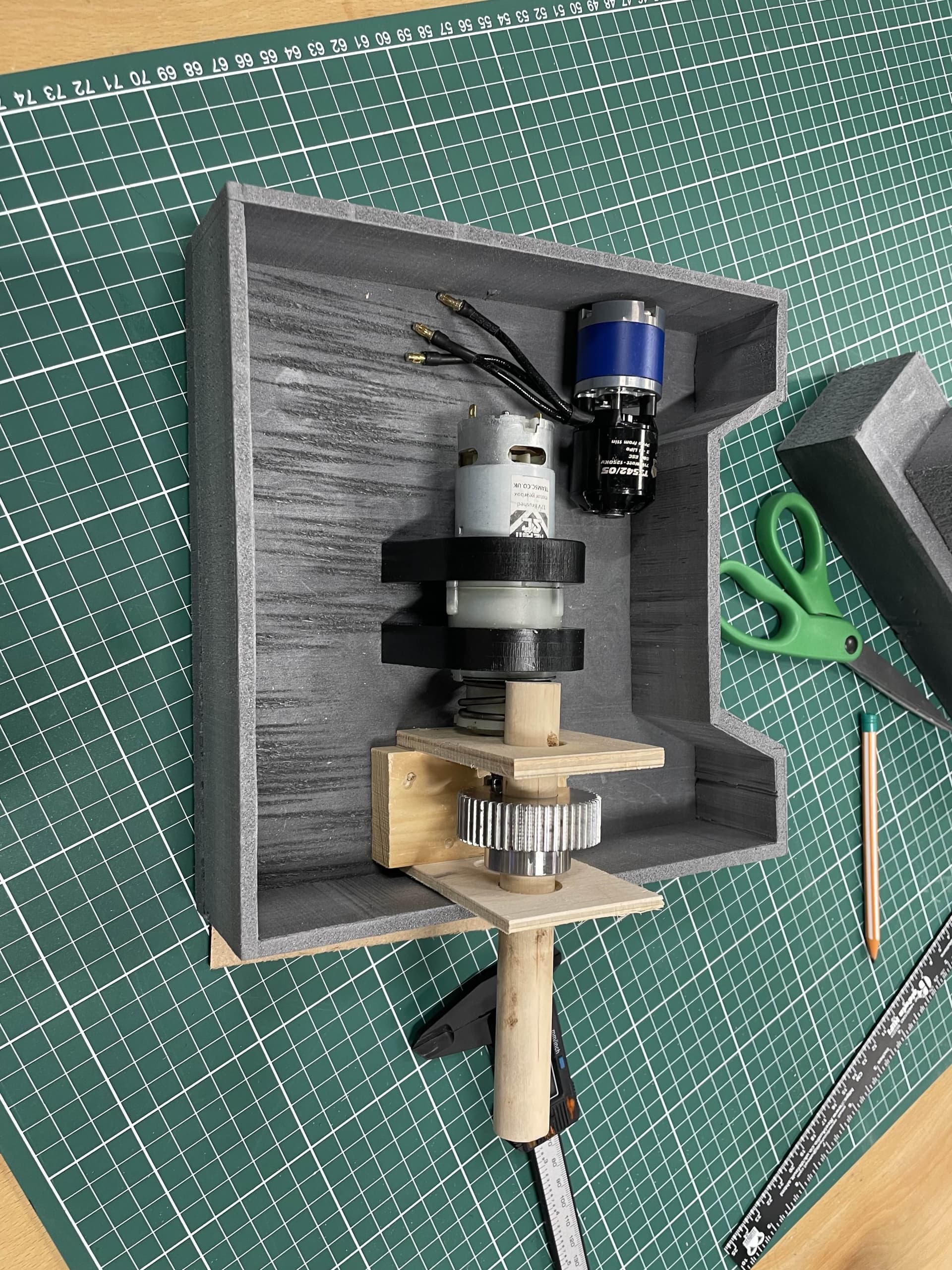
Prototype
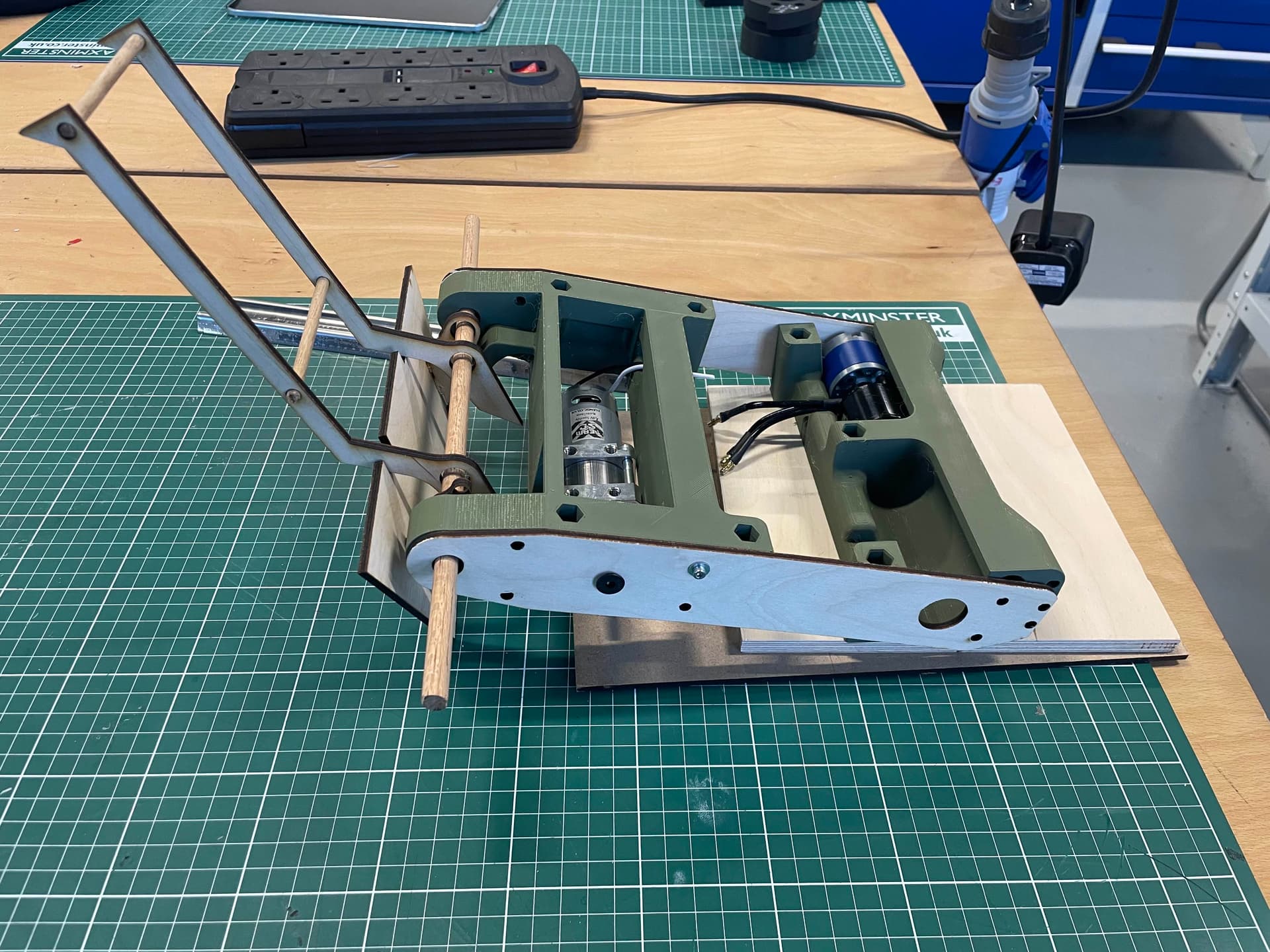
I printed out the chassis from PLA so I could test-fit the components, and also because one of my goals was to test-drive the prototype within the first few weeks of the semester. The test drive went well and brought up a few fitment and rubbing issues around the motor housing. It was also the start of a heat issue.
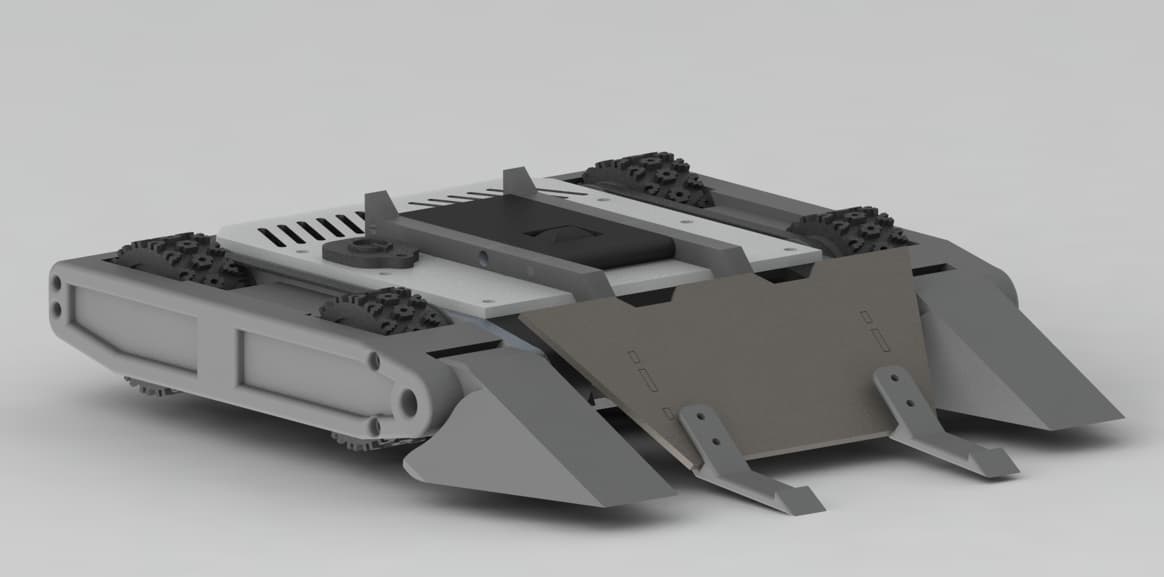
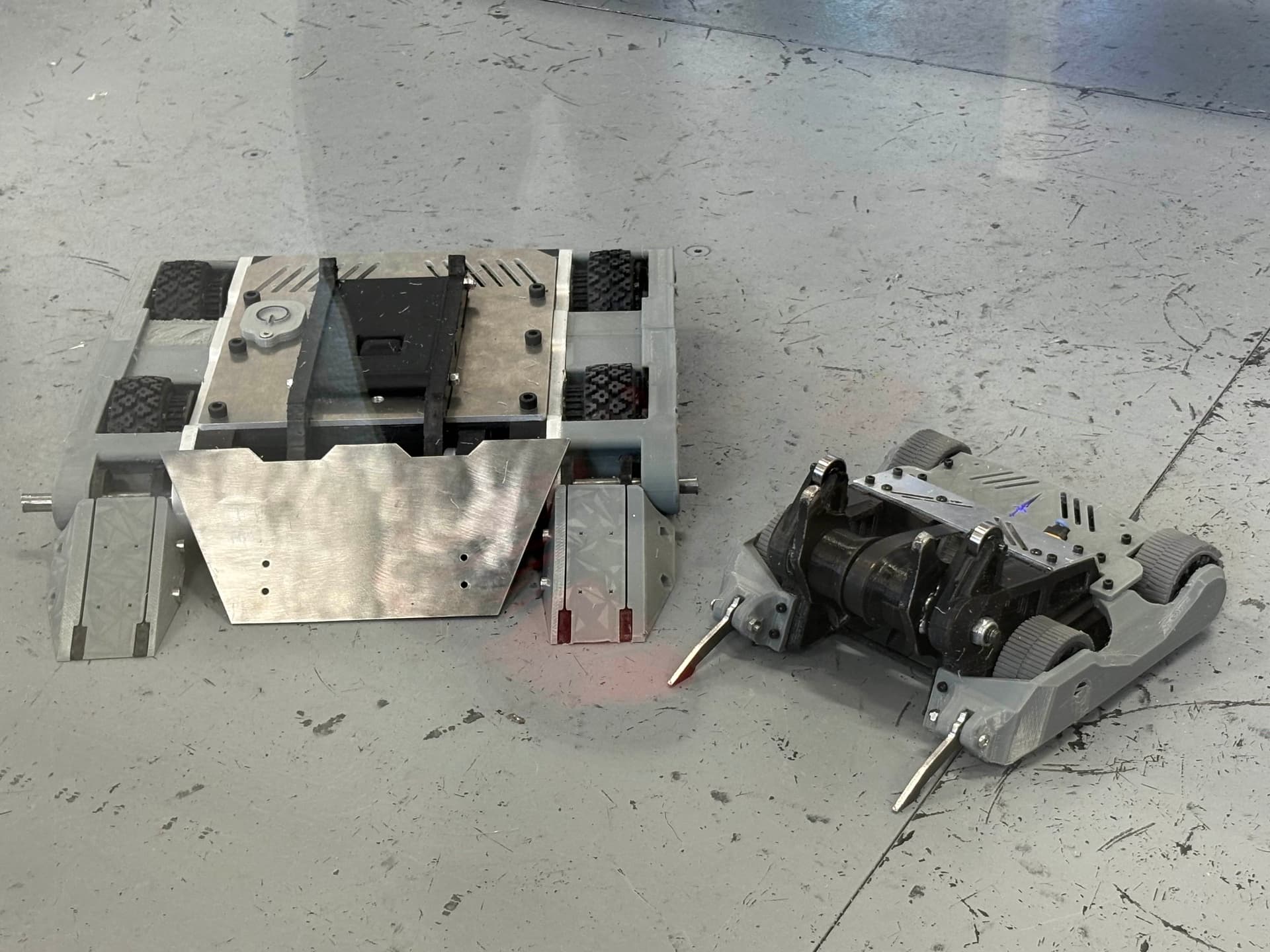
Final Build

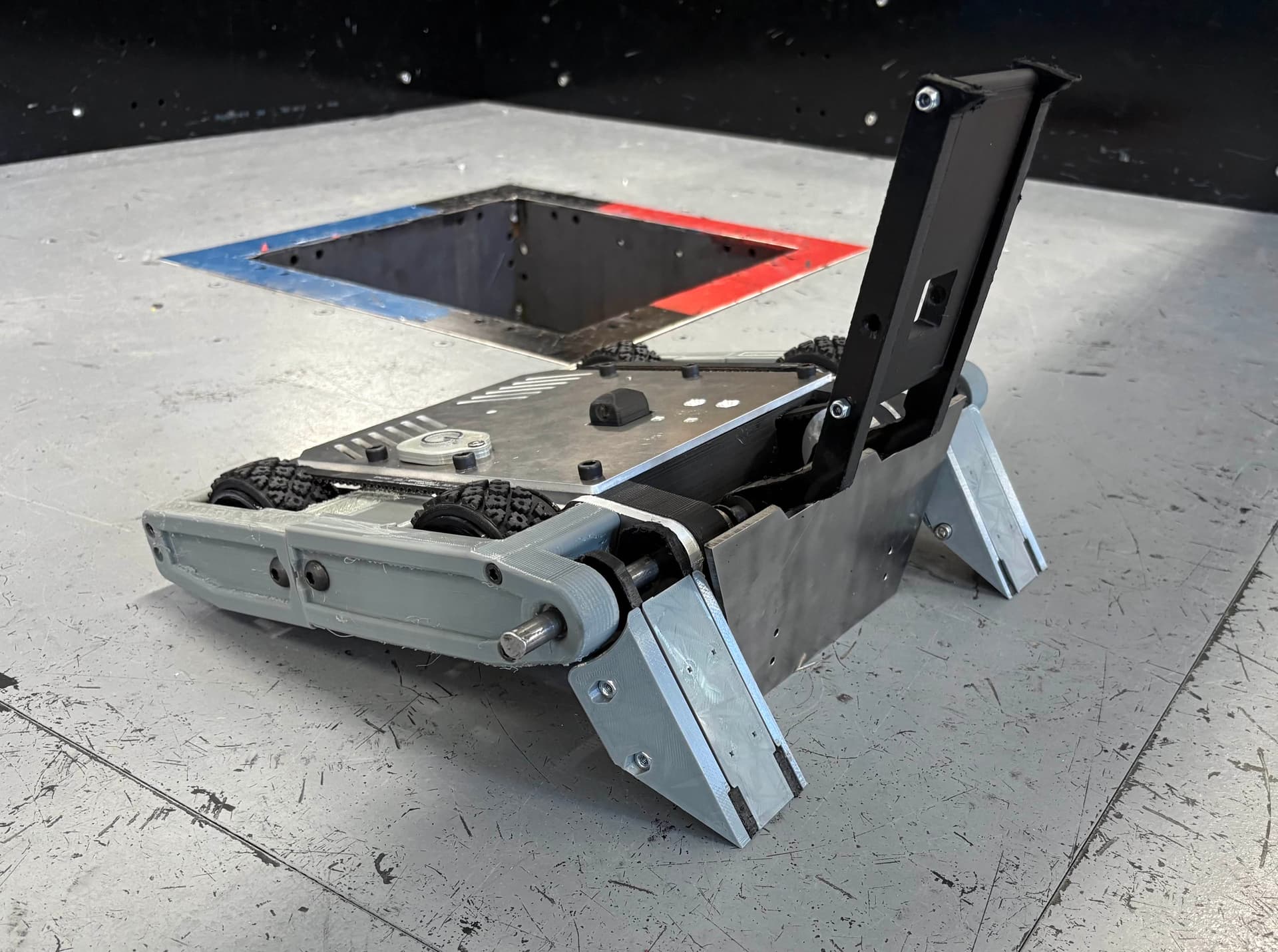
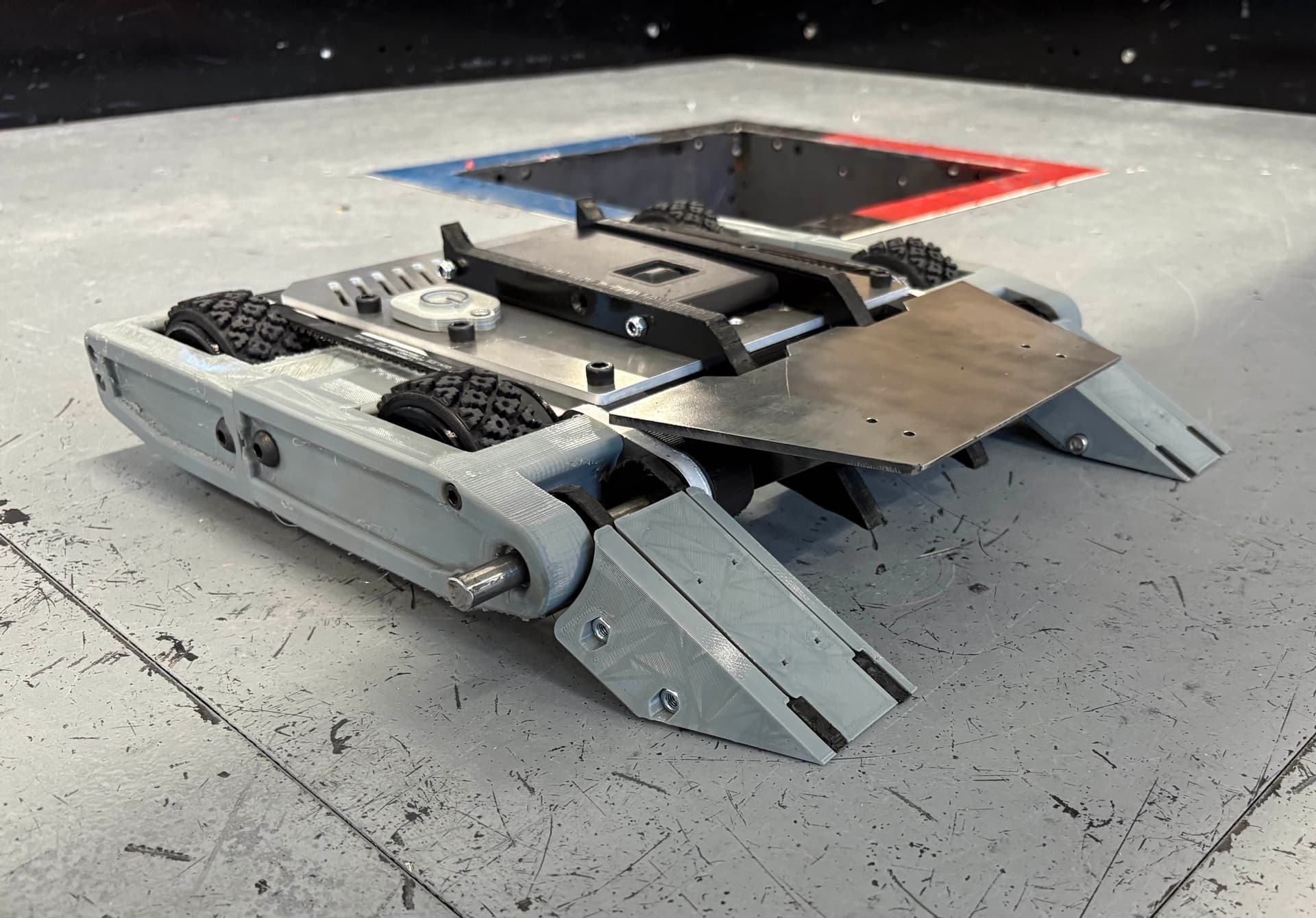
The final build was completed with around a month and a half to competition time. This allowed me to test and find any issues.
One major issue I did find was that the ESC I purchased kept overheating. We figured out that it was probably due to the lack of a thermal mass.
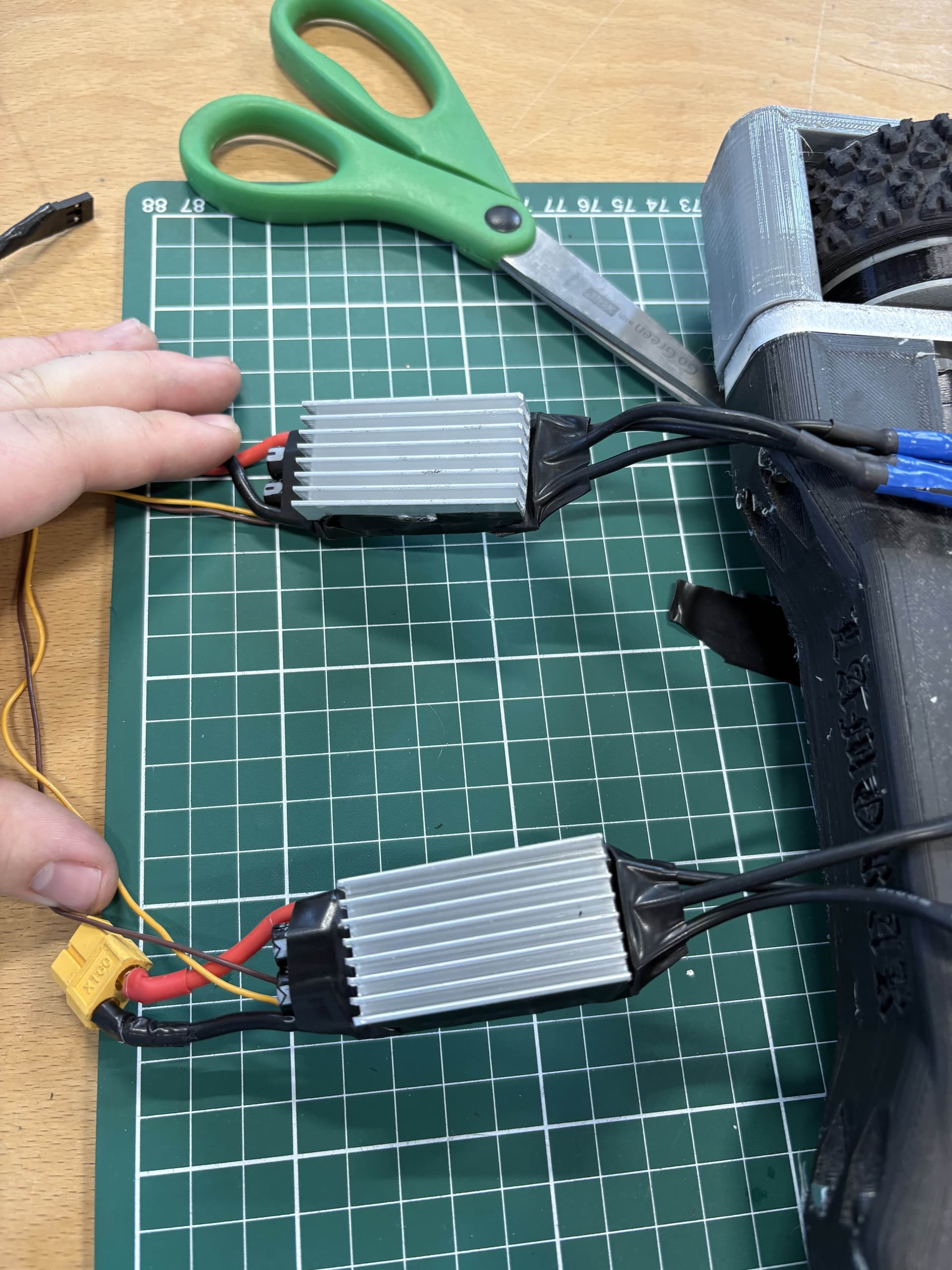
So I added some heatsinks, which now stick out the bottom of the bot slightly to help with cooling. These worked great.
Competition Time
All fights can be seen here:
Week 2 Fights
So week one didn’t go as well as I hoped. I overdid the attachments and had a few issues with my link, which caused me to lose against a vertical disk spinner robot.
Week two, which was the finals, went very well. I took a minute and improved my driving, trying to be a lot more relaxed. I also added some metal edges to my TPU wedges to help get under opponents easier—and well, it worked. I ended up winning the competition and beating each of my opponents at least once.
Future plans
I plan to take Lamorak to future Hobbyweight competitions with a few upgrades ![]() :
:
The Knights of the Round Cradle
At current there are three Bots:
- Galahad
- Lamorak
- Lamorak Jr

Thanks for checking my bots out !