Hiya folks,
This is my build diary for Kyrkja, pronounced chy-ur-ch-ya, named after this peak in Norway.

This will be the third rebuild of Kyrkja, with the hope of being accepted into Fightfest 2024.
This is far from finished and will be adding to this post as I go, bringing you along the journey with me.
Backstory:
This was the first iteration of Kykrja, I don’t want to talk about it…

This was the second, taken to Fightfest 2022.

This was supported by my university, with the weapon disc being the logo of their new Robotarium. Unfortunately, the acquisition process through the uni got me the parts a week before the competition so any issues I had would not be fixed. This did happen to be the case, with the spinner ESC having current limiting so it did not spin.
The third feather I built was Sentience, and competed in Fighfest 2023.

Sentience was too much of a heartbreack to make a video on. It was supposed to be fully autonomous. For my Masters dissertation, I had created a novel, unique object detection algorithm using just a 2D LiDAR that does not need any prerequisite knowledge of the object, that will detect and track the object. This was to be the worlds first fully autonomous combat robot. Sadly, the uni failed me even further by not providing me the parts as they said they would.
A week before the comp, I resigned that I would not get the parts, let alone have the time to fix any bugs. It was bodged into a 4wd box with a lil vert, which could not have been done without Alys and Nathan.
Despite the self inflicting belt sniping, and lack of any SRiMech, it managed a flukey third place in the student catagory thanks to a bit too hasty tap out whilst I was being counted out.
Saying this, I would have preferred zero wins with the autonomous version.
Design Changes:
This year, I am unburdened by the uni supply chain, only my own wallet. I don’t have the time, or money to make Sentience sentient, so I am going back to the Kyrkja hammersaw.
With this version I plan to fix everything that went wrong with Kyrkja and Sentience whilst keeping the good aspects of both.
1. Armour
Kyrkja V2 had 10-15mm HDPE armour. This did not work well.

Sentience had a 25x25x5mm welded angle steel frame and 4mm hardox 400 frontal armour .


This took some big hits and warped, but held up strong.
Sentience also had forks, which worked well, for a bit at least.
For Kyrkja V3, the frame will be a mix of 20x20x3mm angled steel, 3mm flat steel bar and 3mm steel frontal armour. This is less than Sentience, I hope it will hold up.
It will also have 8 forks. Cause forks.
2. Drive
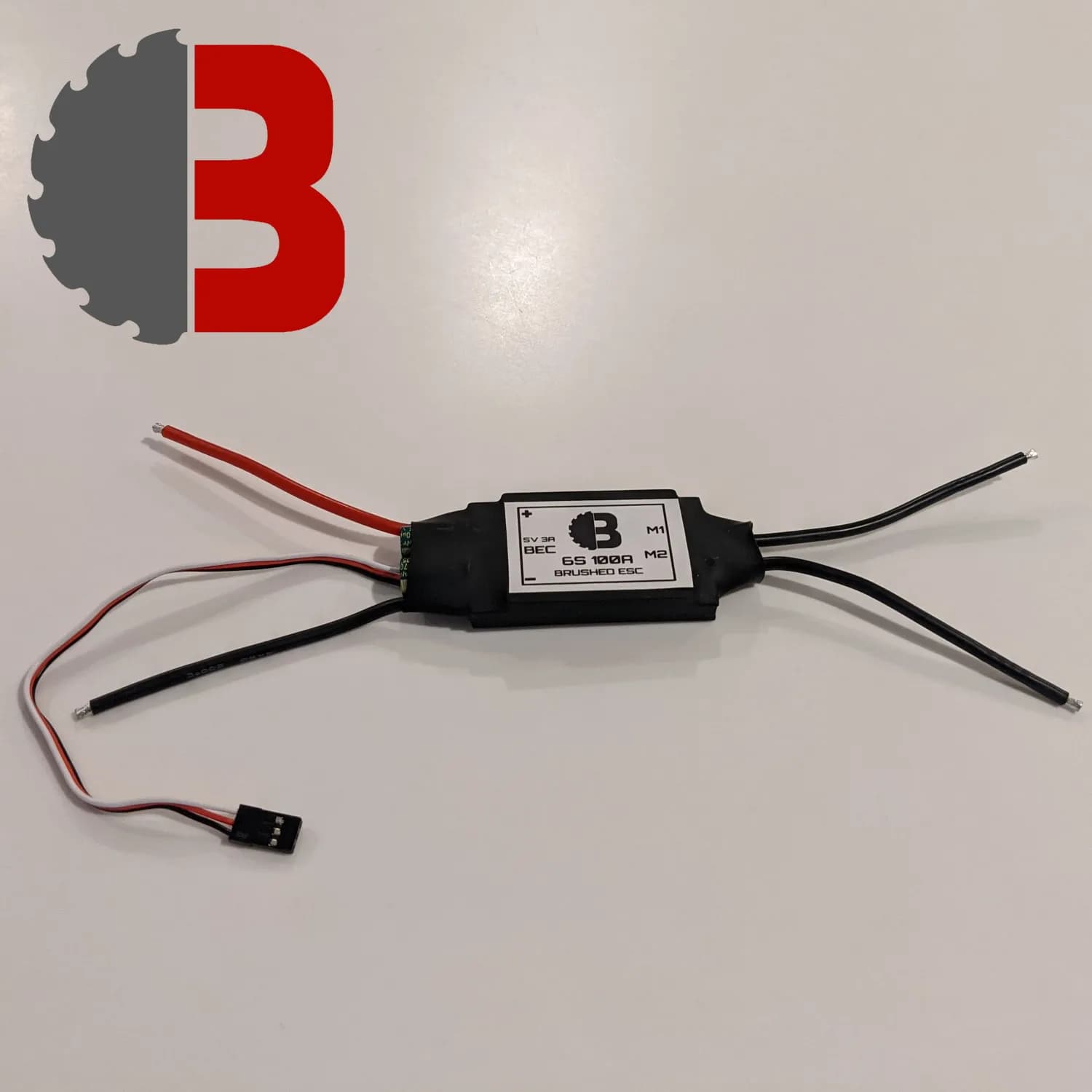
The drive was the best thing about both Kyrkja V2 and Sentience. Powered by 4 x BBB 900rpm brushed motors motors at 5S using the BBB 100amp brushed ESCs (1 ESC per drive side) provided both power, reliablility and durability. The only thing that killed the motors was the front armour being bent into the wheel and stalling out the motor for 2 minutes straight.
Finally, the wheels. I used the 100mm BBB featherweight wheels. Overall, these worked well, the only issue being that the wheel does tend to come off the threaded insert when hit.

If it ain’t broke don’t fix it. I’m gunna be sticking with what I know works and ignoring any fancy brushless things.
3. Weapon arm
Last time the arm was made out of HDPE.
This time the arm will be made out of CNC’d 80x80x15mm aluminium ends joined by 19x19x3.2mm angled aluminium. Once it’s built, if I have the weight, I may change these to steel.
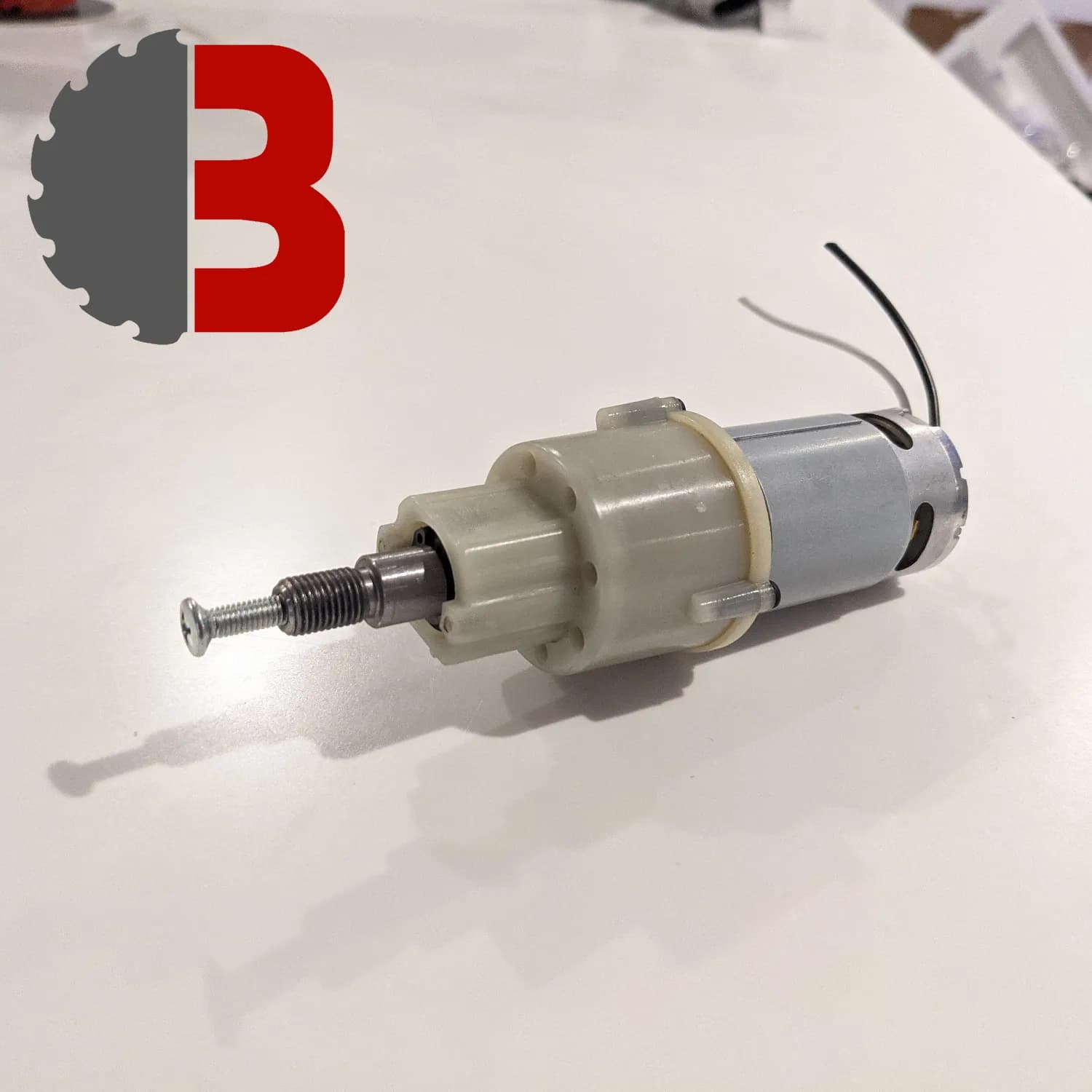
The arm was powered by a scootie motor with another 100amp BBB esc. This worked suprisingly well with enough power to launch itself in the air!
In Kyrkja V2 I used a 6mm chain as the sprocket on the scootie was 6mm. Naturally, this chain broke a couple times and was an absolute little … I also did not use a chain tensioner. And my chain breaker wasn’t the correct size and kept breaking. I hate chains.
For this version I have got new sprockets and a T8f chain. I will also be having a system to tension it so I’m not crying everytime trying to take a link out and forcing the arm in place. I hope the chain will be nicer to me this time.
4. Spinner
The spinner is 1.2Kg Hardox 500, a little small for a vert on Sentience. However, it is a little big for a hammersaw. Perfect.
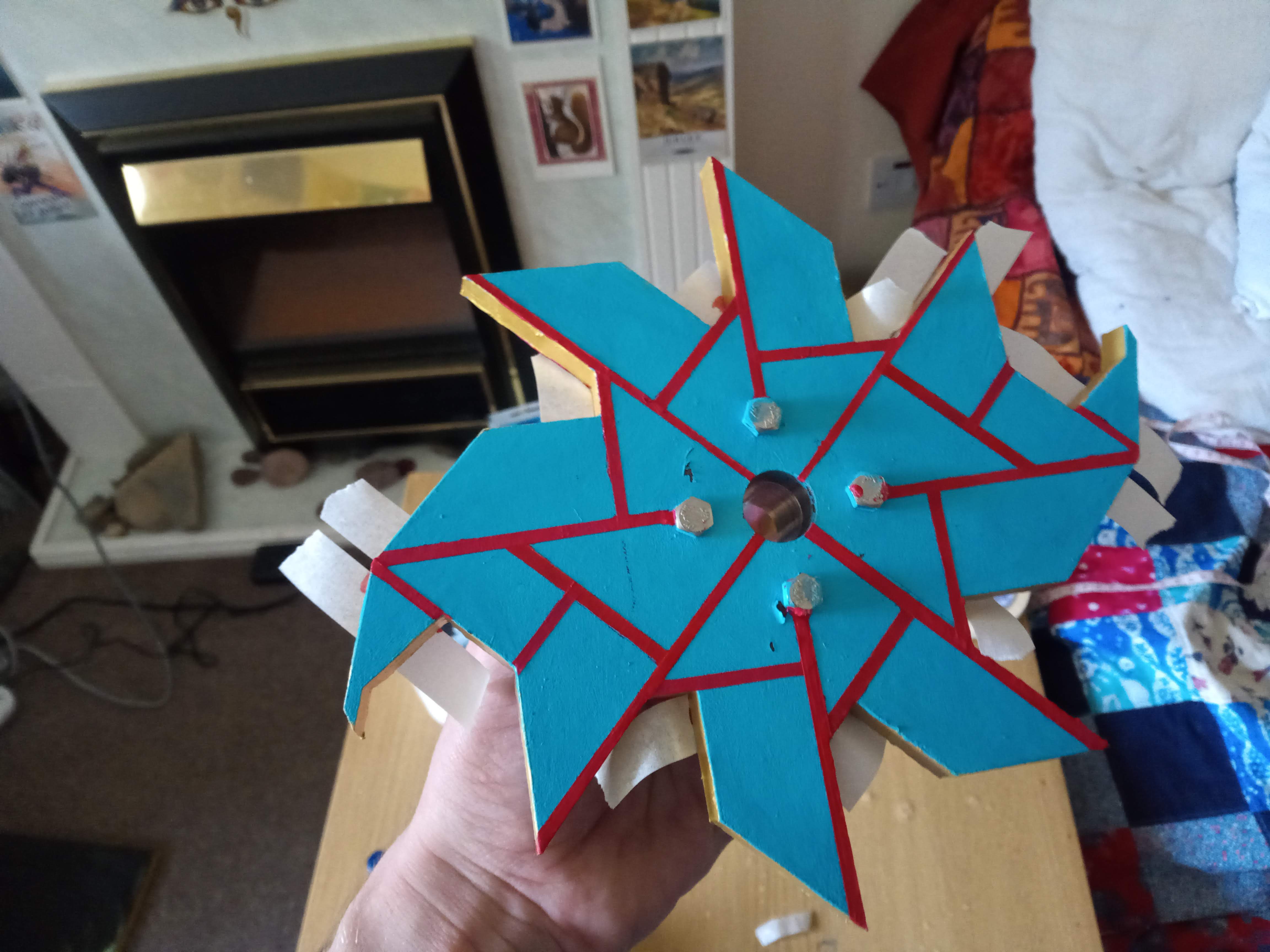
Painted by the lovely Freggs.
The spinner motor was a Propdrive 4258, should have been overkill but still managed to become toast in Sentience. This was also a bit exposed on Kyrkja V2. I have bought a Propdrive 5050 which will be nested within the arm just a little further out of harms way.
The spinner ESC in Kyrkja V2 was a nightmare with current limiting. I stole one of Alys’s for Sentience which I can’t remember what it was, whether it let loose its magic smoke, or if I still have it. This time I have bought a 125amp redbrick ESC off ebay. As I have more than a weeks notice (3 months), I will have plenty of time to test and fix if this does not work.
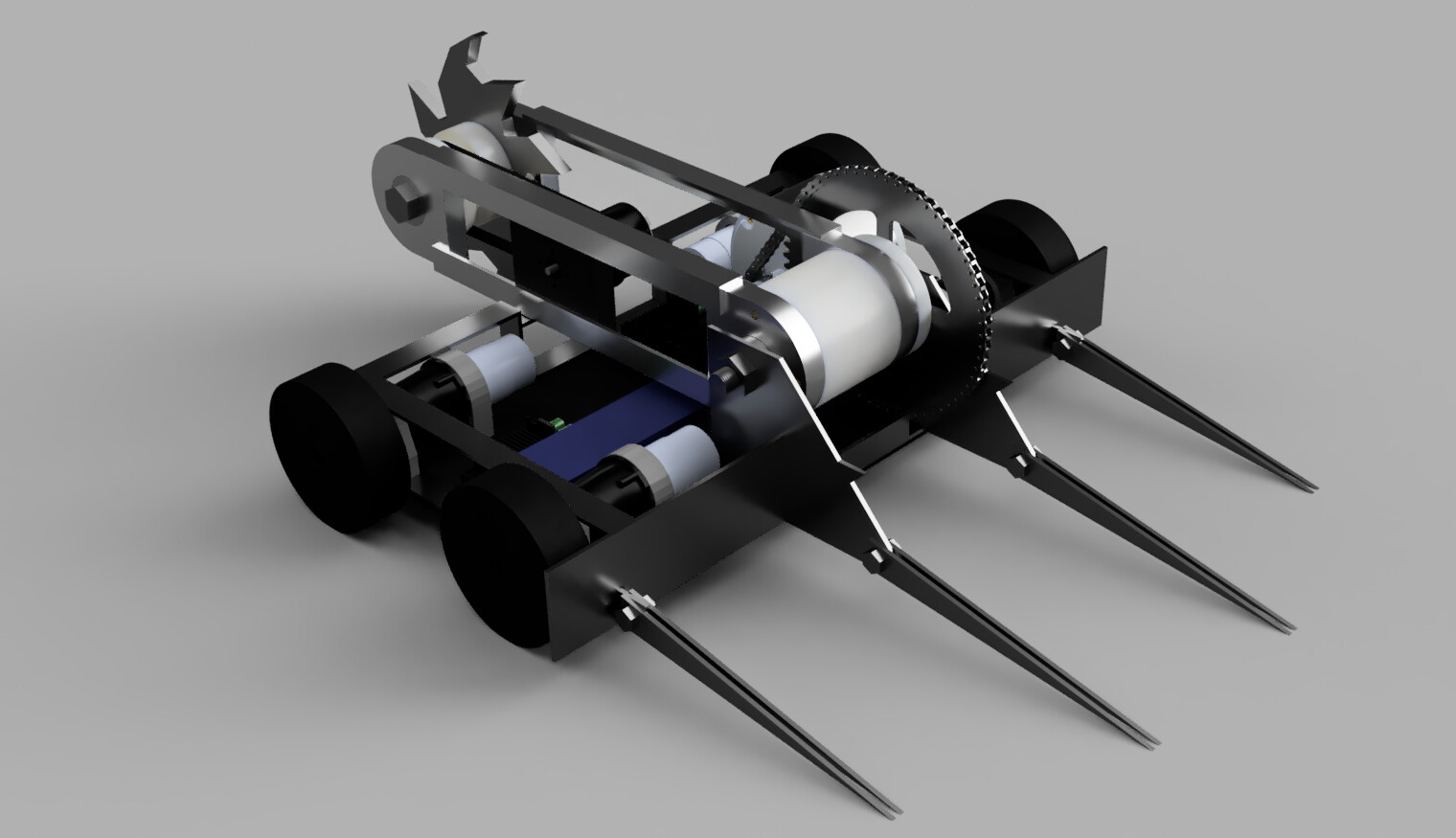
THE BUILD
So, with (almost) everything ordered and arrived. It is time to start the build.
The metal order from Metals4U was prompt and fairly reasonably priced.


The scary angle grinding is complete, now to get welding…

I am also printing the parts I need CNC’d in the meantime as I decide how I’m going to get the aluminium machined.
Thanks for reading folks, I’ll keep updating this post as I go!
Cheers,
Rhys