Hi! I’m starting to build a Featherweight. It is a pretty conventional setup, with 4wd and a brushed-motor driven lifter.
I’m hoping to use this to prove some electronics will do what I expect, and see if the parts I’ve selected will immediately destroy themselves.
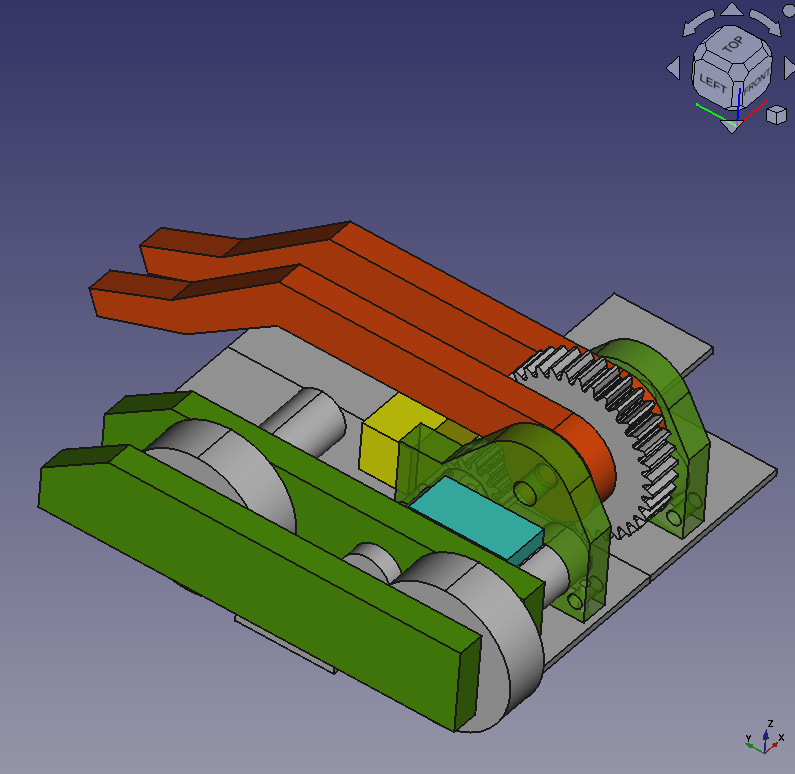
The design is not complicated - but I’ve chosen, perhaps unwisely, to use 3d printed gears again to drive the weapon. Obviously this involves a great deal of torque, but according to my back-of-vape-box* calculations it might not fail immediately, plus they worked really well on my Beetle.
“Tuned machine” franken motor/ planetary 36mm gearbox with 8mm output shaft. Feels pretty chonk, spins at roughly the right speed. I expect this to work, the gearbox has only 1 stage and is 5:1. These are RC car brushed motors which have ridiculous amounts of power for their size, but they sound pretty rough when running.
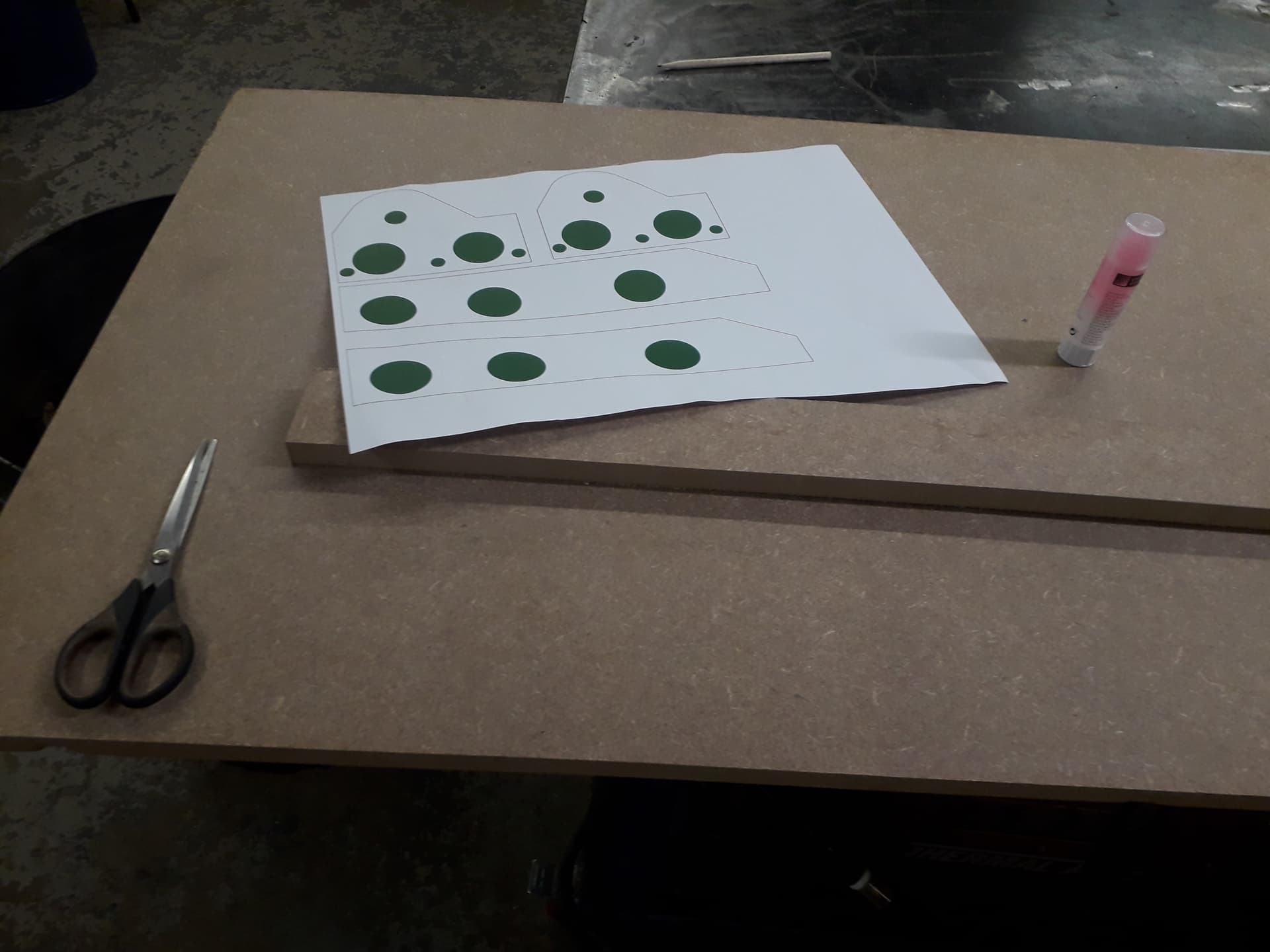
Literally the current state of construction is a few pieces of 18mm thick MDF (standing in for HDPE, to test construction techniques), a pile of paper with printed templates, and a box of motors and bolts.
Some parts of this robot will need to be custom machined by me with my limited metalworking skills, but I think it should be do-able. Most of the structural parts will be made from HDPE.
Some bits will be 3d printed but mostly internal fixings and such like.
I might do a few things like anti-stacking bumps with 3d printed TPU as that works super well.
Loving the concept and 3d printed part abuse is something I’ll be watching with interest.
I will always go to bat for ‘proper’ rc 540 motors as they’re often remarkably well built and the low turn flavours for crawlers and F1 are ripe for abuse at robot voltages.
Update: I have successfully made a few bits of wood with holes in roughly the right places. At least
I now know a bit better how to drill 36mm diameter holes
I have shown that my barrel nuts work
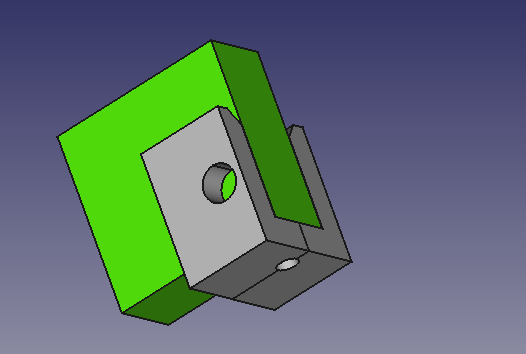
My 3d printed barrel-nut-drill-guide works a treat:
It’s a very simple 3d print which grabs the edge of a piece of material (18mm MDF or 20mm HDPE, I made several variants) and has holes of the right size and location, to guide a drill in the right spot.
Sort-of. After a bit of faffing around. It’s still not very dimensionally accurate but using a slightly bigger hole saw (not the Hackspace very-wonky hole saws) I was able to drill them out slightly bigger.
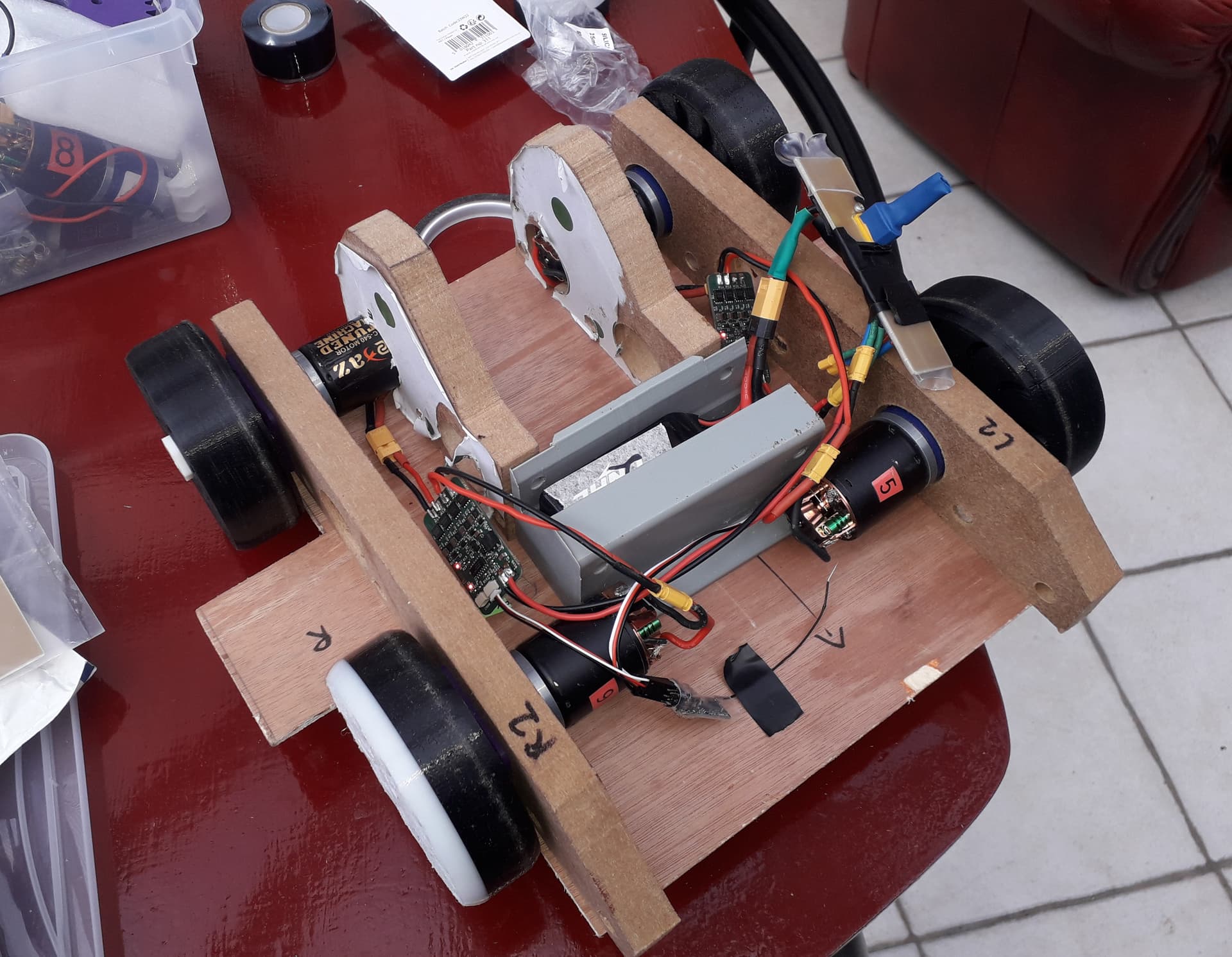
The stuff fits. I don’t have a scale to weigh it just now, but it feels quite chonk already
and a lot of the bits are missing.
After some electrical schenanigans, I have a power distribution system.
I’ve got 2x Tarakan dual brushed ESC, each drives one side of the robot (tip: Tarakan users: if you want to drive 2 motors together, you can keep mixing enabled, then just connect the channel 2 input).
As you can see, the wheels are on and I was able to drive the prototype.
It moves
The gearing is too fast
Top speed is much too high for my room (I am guessing > 10 metres / second, 20mph ish)
Turning doesn’t work so well (due to too high gearing)
I also tried putting a 10kg weight on top of the robot (Making it significantly over the Featherweight limit of 13.6kg). This was less successful. Besides overstressing the plywood base plate, the 10kg weight makes it very sluggish and unable to turn. I also hear the overcurrent cutoff happening on the Tarakans.
I think I’ll need to order some higher ratio gearboxes (currently running 5:1) - otherwise, quite a successful test. It could compete with these gearboxes but it’s going to have very little pushing power.
The TPU 90A 3d printed wheels don’t have much grip, but it doesn’t really matter at the moment ( will worry about that later).
I sort of missed the 5:1 part - yeah I am really not surprised that its going to struggle. I’d imagine those needing a 20:1 minimum in order to be relatively happy.
You may also find that the printed wheels are helping out with some traction based current limiting too!
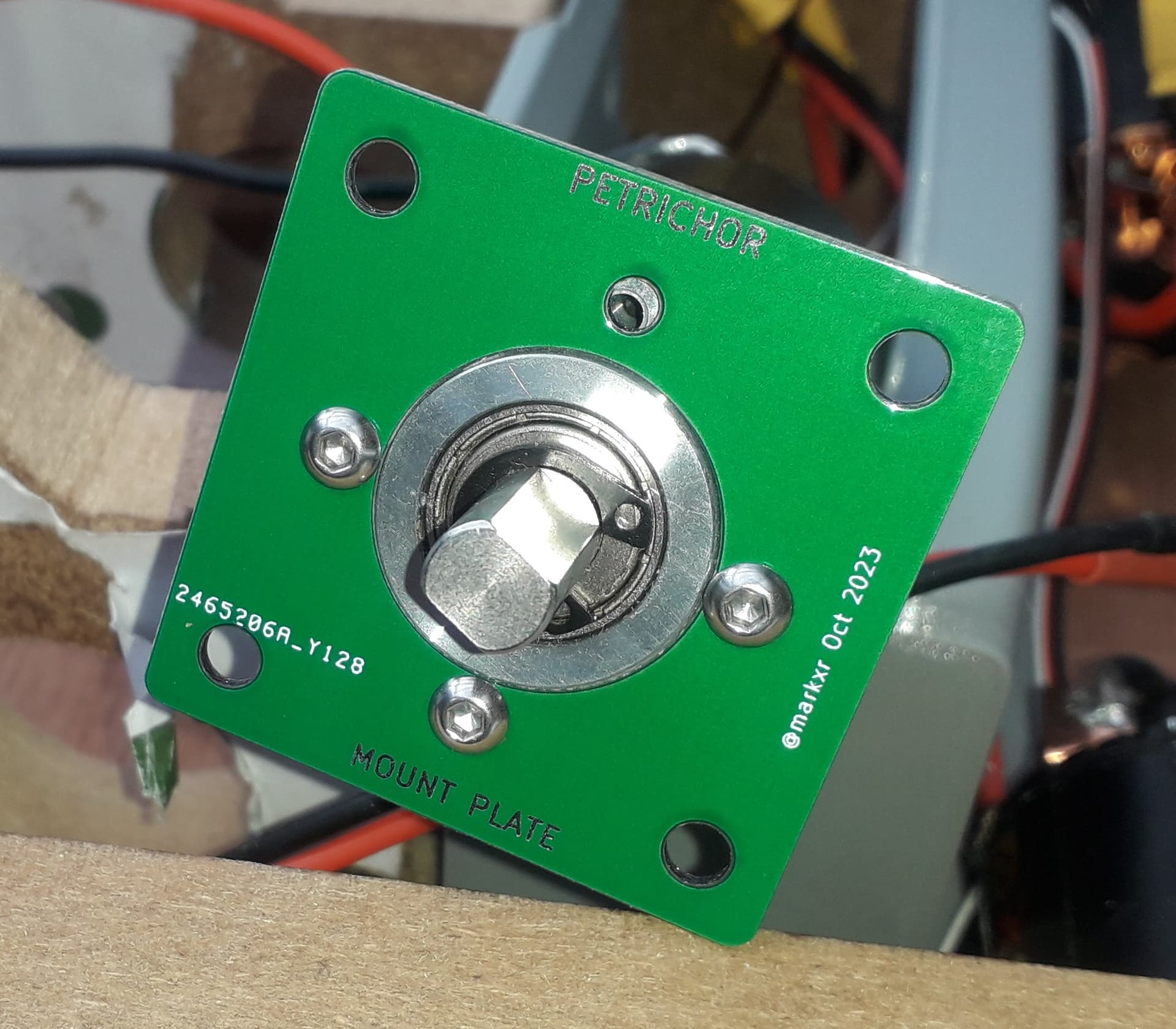
Ok so I got cheap printed circuit board company JLCPCB to make some parts. As well as a functional PCB for the power distribution, I also got them to make the motor mount plate as a PCB.
Unfortunately I slightly screwed up the design, so only 3/4 bolts fit. I can bodge it of course.
Always double check designs before sending off.
Anyway it seems a lot more solid than the 3d printed PLA version. Metal would be nice but probably not really required as they don’t carry the weight of the robot (only to stop the motors spinning in place or moving laterally really)
Ok I fixed some ESC and transmitter settings, and now it drives fairly well. Not perfectly because the wheels are not grippy enough, but that will hopefully be solved when I get around to moulding some tyres. I may keep the 5:1 gearboxes as they seem ok for now, and it’s fun going fast.
The lifter also lifts, which is quite pleasing, and didn’t destroy any gearboxes in testing yet…
Ok it’s really coming together now. I’ve still got a few more mechanical problems - some of my tapped holes for grub screws have failed - that’s my own silly fault.
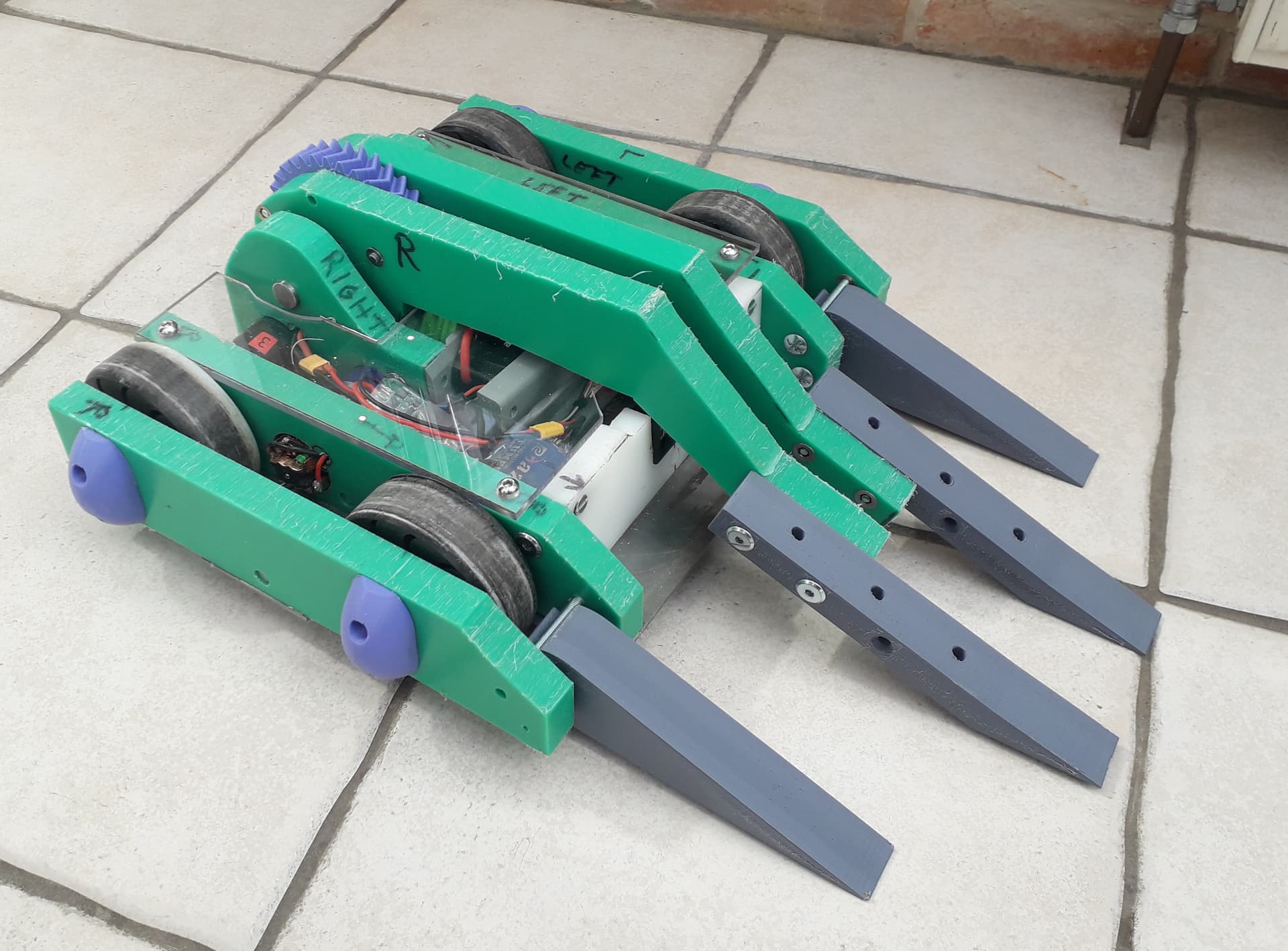
I’m gradually replacing the MDF bits with green plastic. It looks a lot better.
I took the robot out for a little spin in the local tennis court yesterday. Seems to drive pretty well, it’s quite nippy, there are a few niggles to shake out.
Here is the long overdue summary from the Farm / Northdown Havoc 2024
The event was a lot of fun
The robot didn’t break
It didn’t win anything either
A big suprise for me was the extremely large size of some of the Featherweights (mostly from our friends in Ireland). My robot was almost the smallest.
The fights
Mostly I had a lot of trouble with forks getting stuck in the floor / arena edges being too low and uneven. I spent a lot of the first fight stuck in the floor (never really getting counted out). The forks aren’t even sharp (~ 2mm radius) and made of plastic.
Control wasn’t great
But it did self right convincingly several times
I managed a decent flip on the mini-bots / cluster bots (Something Star-Trek themed), but not full weight opponents
The gubbins, how it worked
The structural parts of the robot held up very well with barely a scratch. The picture below is before the event, but afterwards it was basically the same, with a few minor scuffs
3d-printed PLA-ST is a perfectly legitimate material, at least for some parts. In the picture, the grey forky bits are PLA-ST
My drive was too fast and not torquey enough
The ESCs (Tarakan, really intended for Beetles) are not really strong enough
Planned upgrades / fixes
I have already swapped the 5:1 gearboxes for 14:1. This gives approx 3x more torque, which seems good although I’ve not tested it much.
I will be swapping out the brushed ESCs for something that can give a bit more oomph
I will be looking for sources of electrical resistance in the system - because I feel that there may be too much voltage sag. I’m currently running on 3S with some very high current (peak > 15A per motor, 6 motors total)
I’d very much like to take it to another BEVs, it was a good laugh.