So.. I’ve seen most flavours of vert, and there’s some advantages and dis-advantages to them.
They hit hard, and recoil is back and up, but turning is a big problem.
their prevalence is also slightly annoying so.. I thought I should see how silly I can make one..
Firstly I wanted to get rid of the gyro effect, so I figured a reverse spinning counter-gyro has to somehow fit in it..
Secondly it has to have a high tip speed and good engagement.. the best way to get both was to go big.
That lead me to make a 200mm diameter weapon and the realisation that to make this in any way usable it’ll need big wheels to self right (as there’s no-way there will be enough weight for another mechanism)
Following the big wheels train of thought, I recently took damage on my other big spinner Gen.Grevous and while a big slice was taken out of one of it’s wheels it did nothing to affect it’s mobility. so.. big damage absorbing wheels are the order of the day..
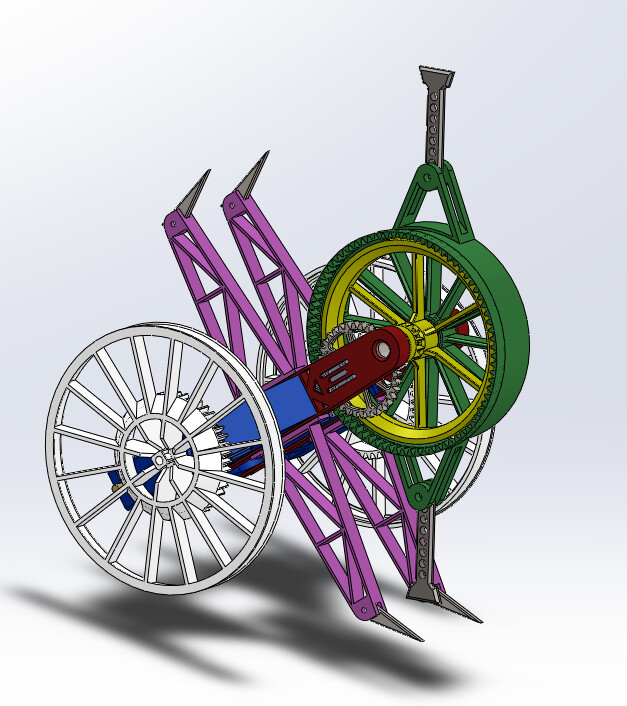
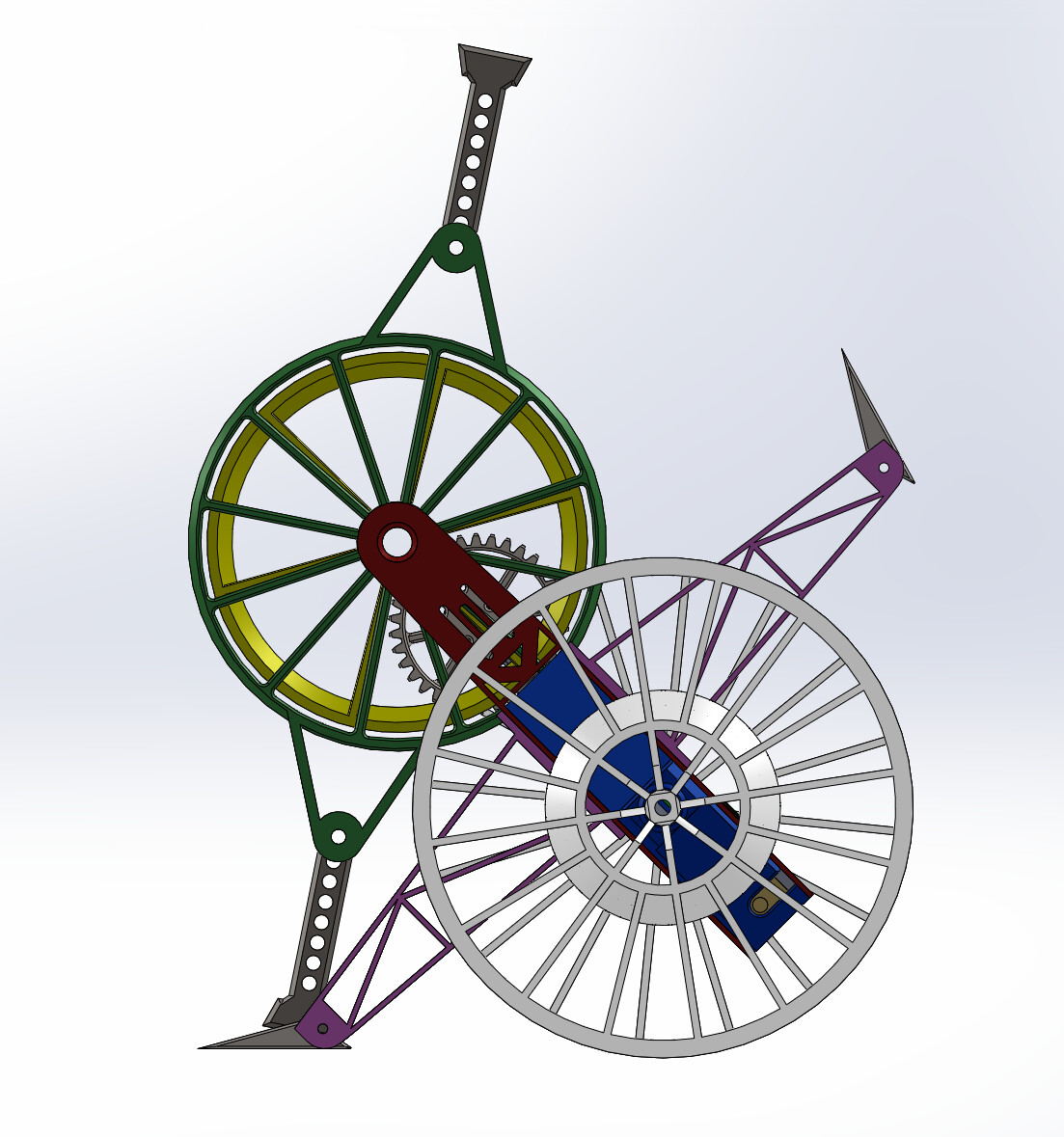
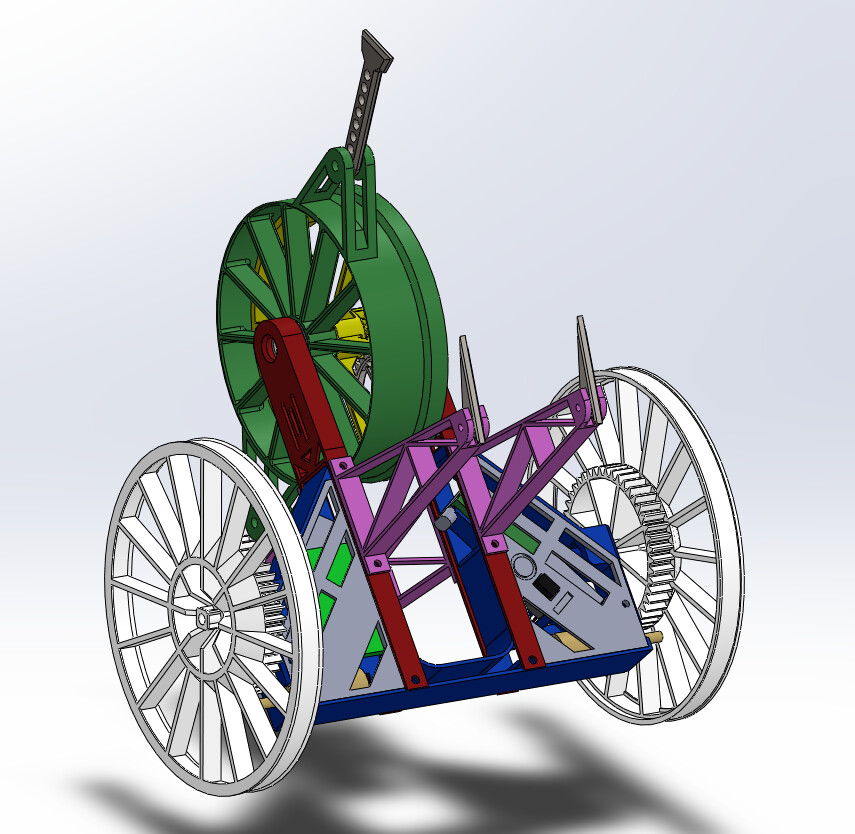
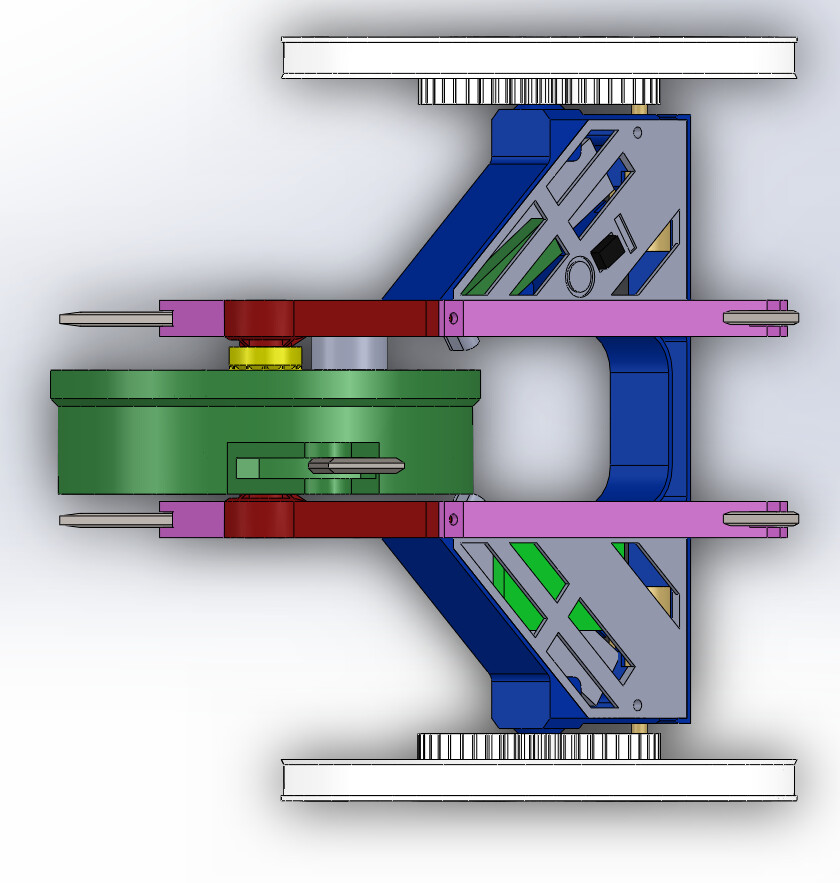
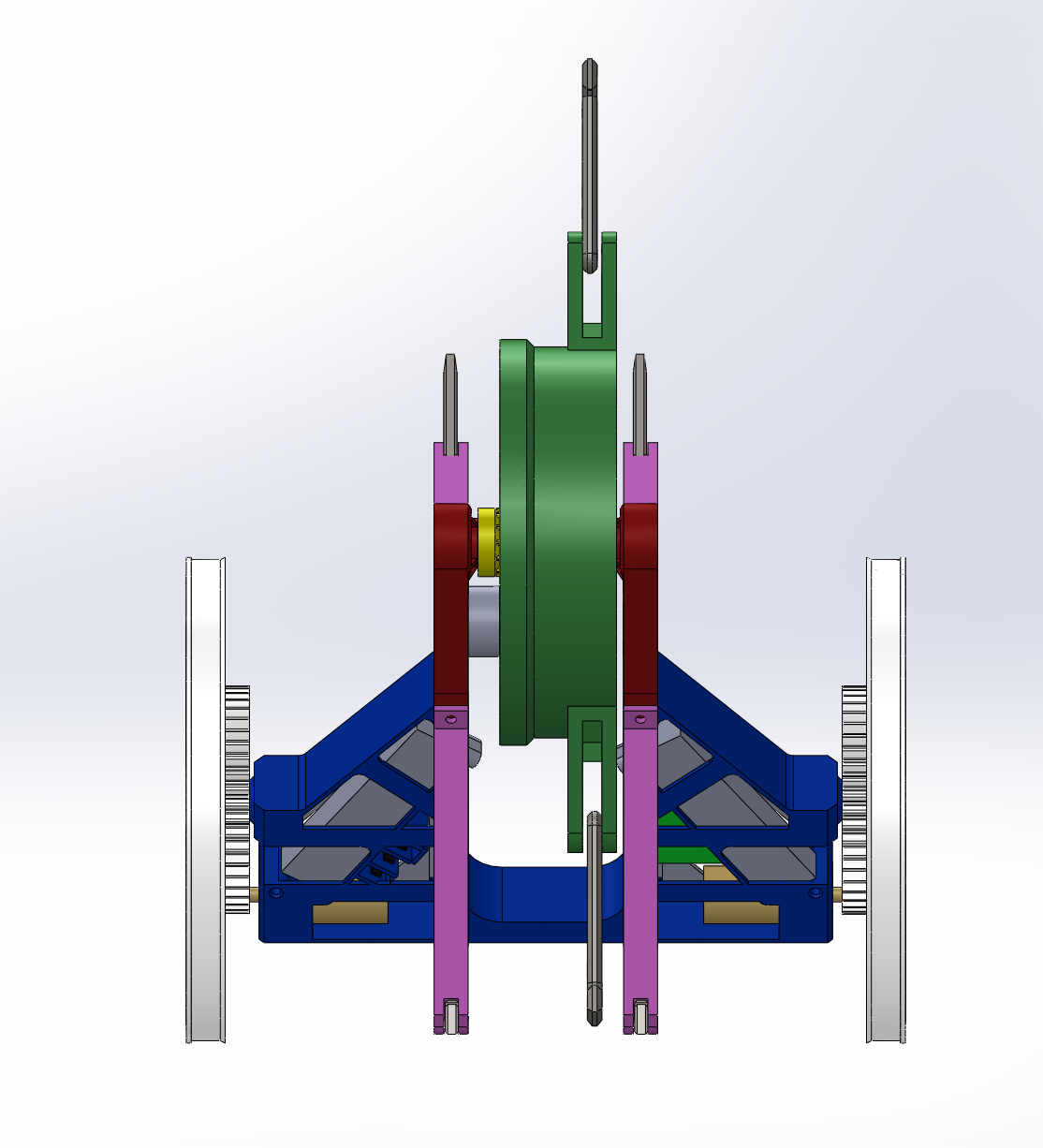
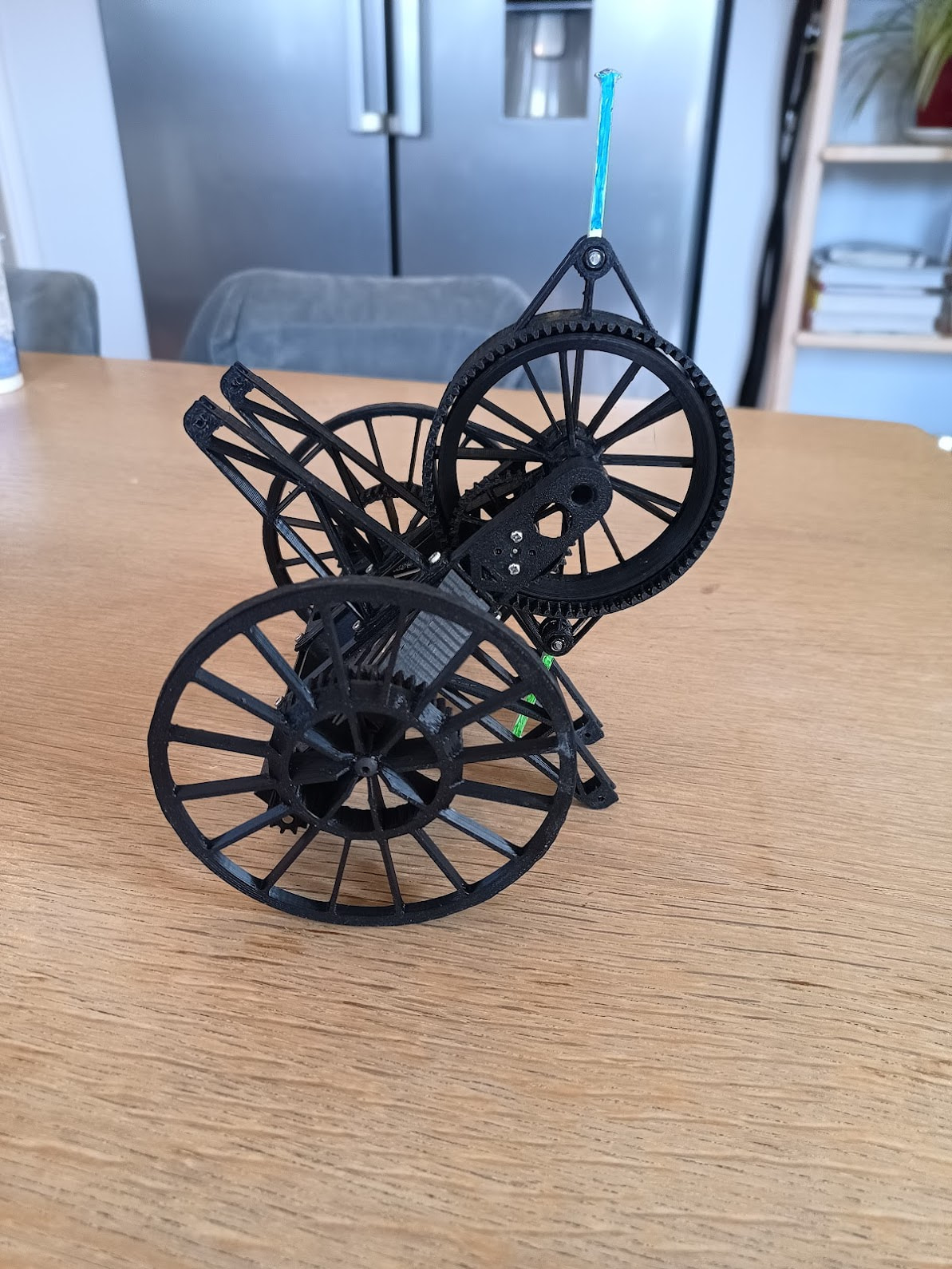
This lead me to a bunch of maths and ratios and COM fights to this..
The counter gyro (in yellow) spins way faster than the weapon hub (green) this effectively removes the cornering gyroscopic forces (they still exist on the axle, but counter each other out)
Weapon will eventually be asymmetric for more engagement, and if it works then the ends will be hardox.
Target tip speed is >500mph, and with a 6500kv motor it should achieve that.
drive is geared the same as my other robots, so it should be quite fast and manoeuvrable.
current calcs have it very close to 150g, but hollow infill will probably make it lighter on a few parts.
Wish me luck.. and if it works.. I wish you all luck against it..
I love it. You mentioned building something counter-gyro and I thought “oh boy I hope it’s Vert Grievous”. Sure enough, Vert Grievous. I can’t imagine the gyro reduction will make it any less chaotic, and I mean that as a compliment!
The plastic inner flywheel looks a little sus for the speeds it’s going to hit, if it has flex and/or stretch issues maybe carbon rod spokes would work better than the printed ones? With some careful jig action you can get some preload on them too, like a bike spoke.
Keen to see it in person - hopefully March GROCS? I will be keeping a close eye and taking notes regardless, I realised the other day that I have no idea how to build a robot that isn’t tiny and this is a masterclass in filling the starting square with kinetic energy.
there’s a definate non zero chance it’s just going to explode on spinup.. but I have a few tweaks I can make to hold it togeather..
one possibility is using CF-PA6 instead of the usual ABS for the spinny bits.
Aero losses are also a potential issue..
but I’ll build it and see if it works.. and go from there..
there will be lessons learnt, and if it’s even close to weight and working, I’ll see if anyone wants to whiteboard it at grocs.
As I said above this is very much an experement, if it’s even close to competative, or meeting weight then it’s been more succesfull than I had hoped..
FYI, PLA prototype parts are printing as we speak.
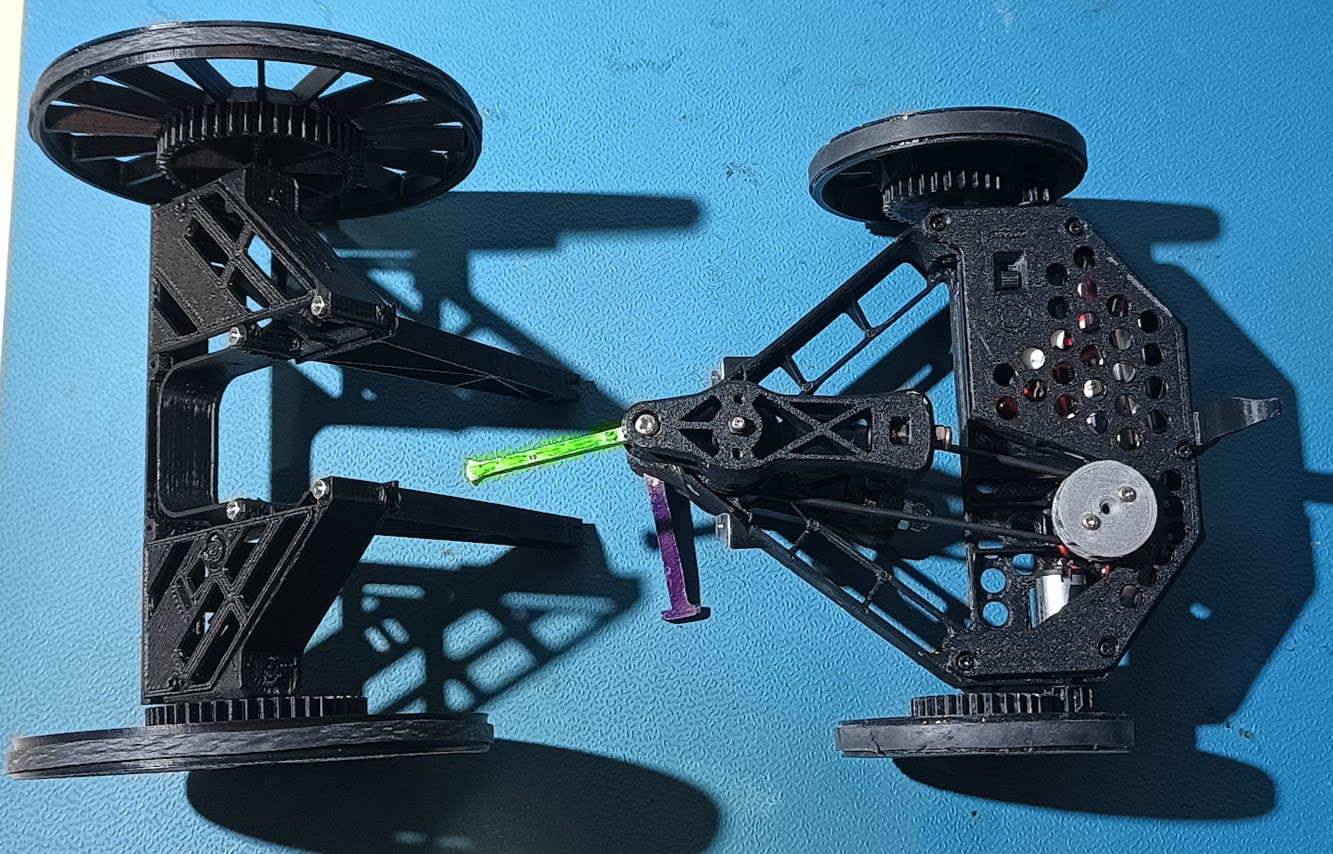
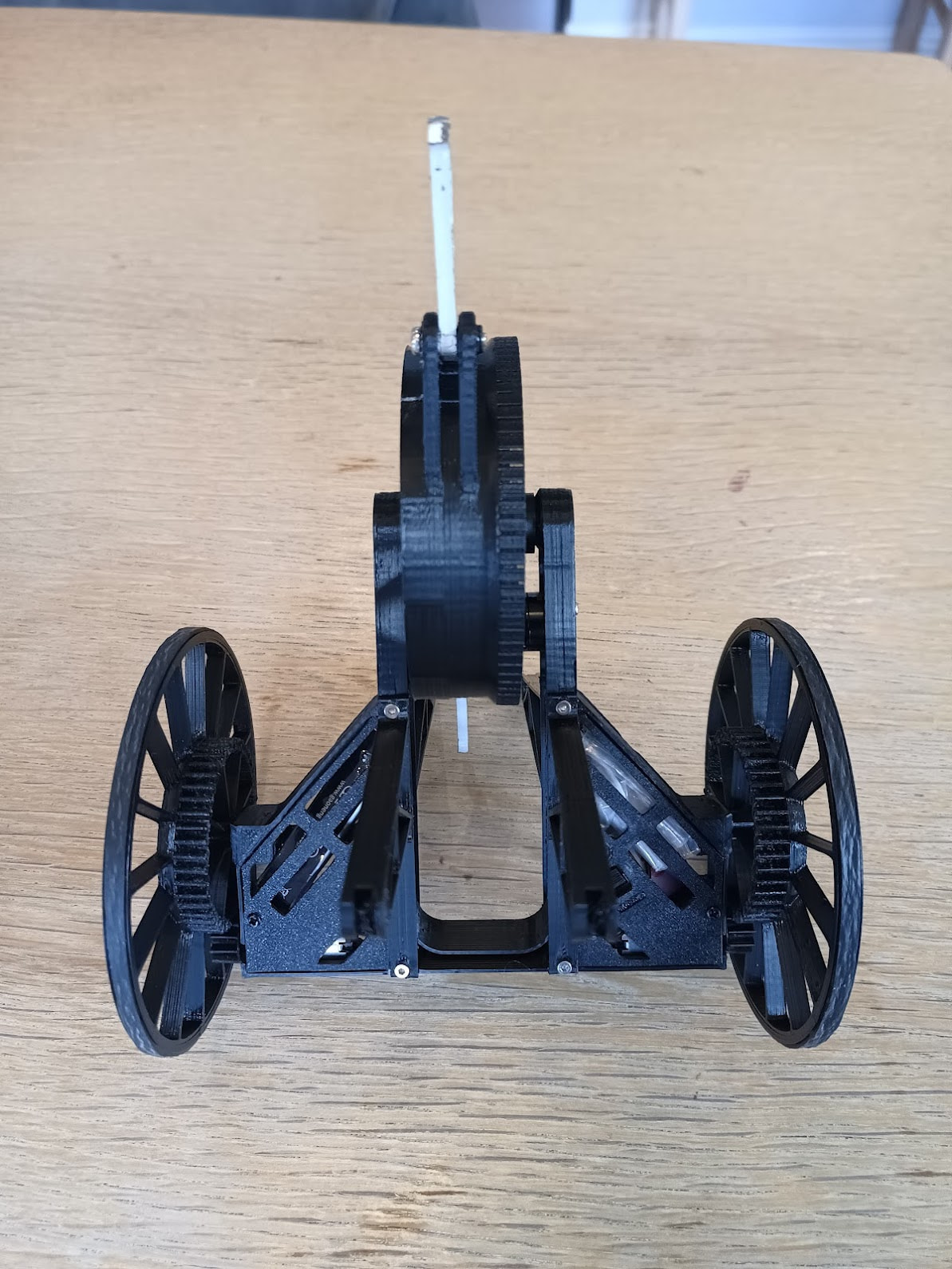
Carbon weapon shaft, everythign fitted except the forks, malenki and wiring..
~7g to spare!
gonna be interesting to test once the malenki arrives, still to check:
Self righting, max weapon rpm, will it explode?
but… We can get it in weight.. so that’s one hurdle passed.
Update:
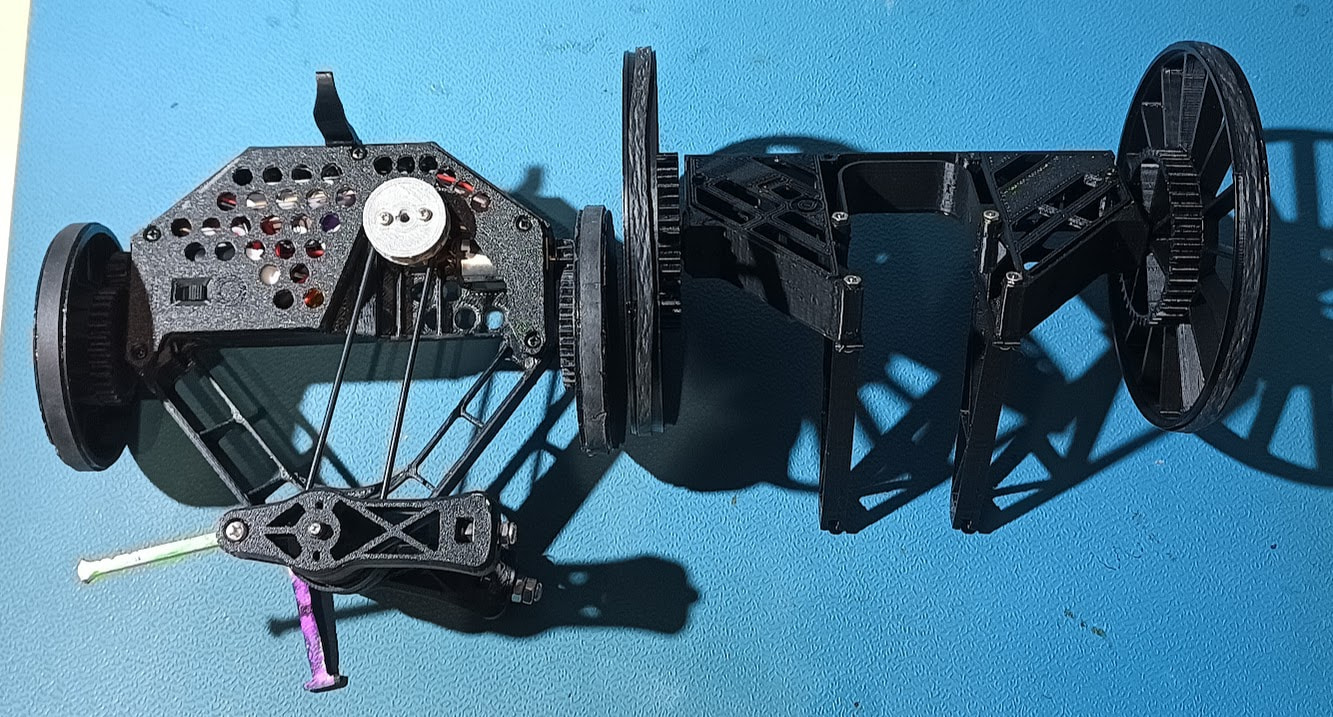
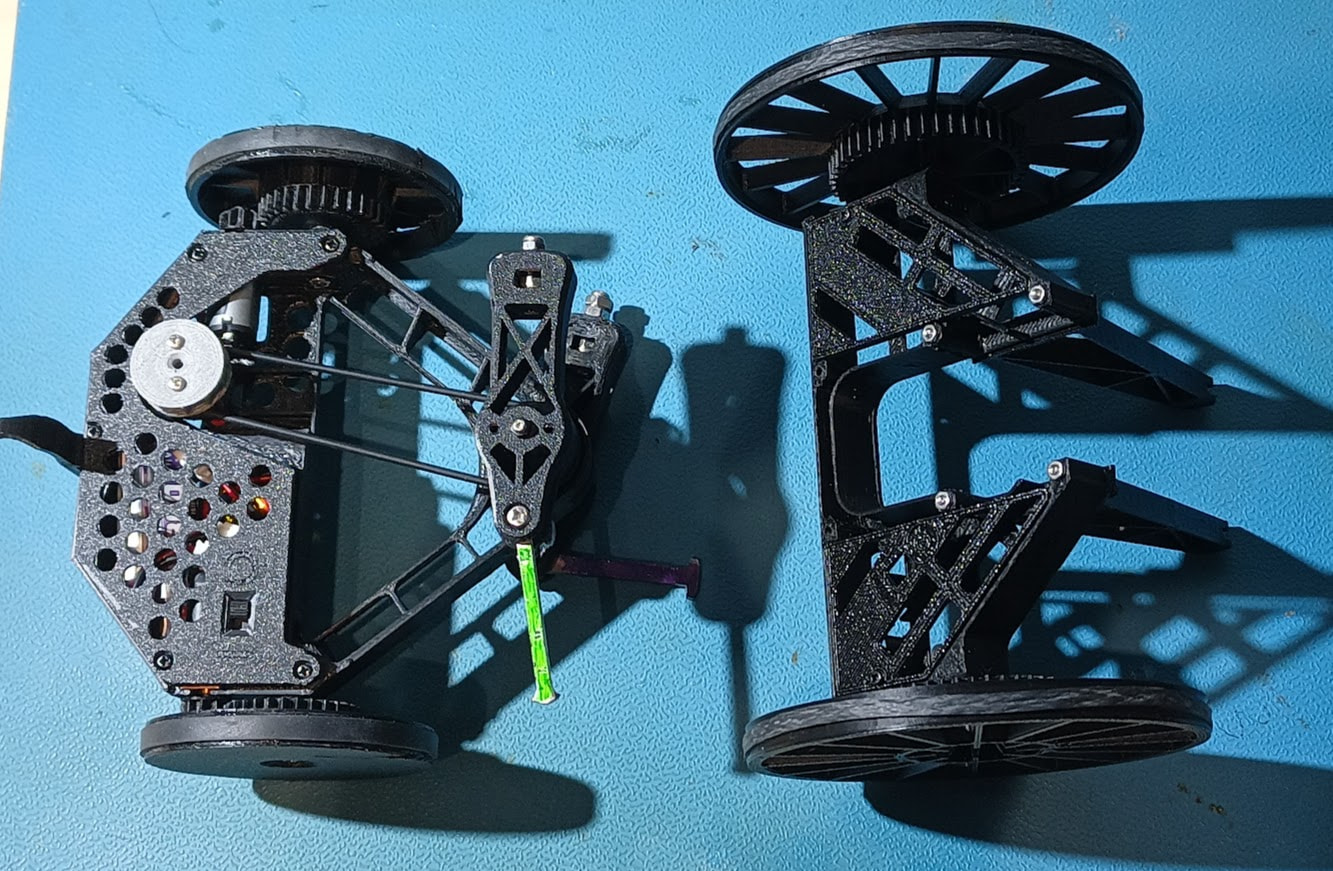
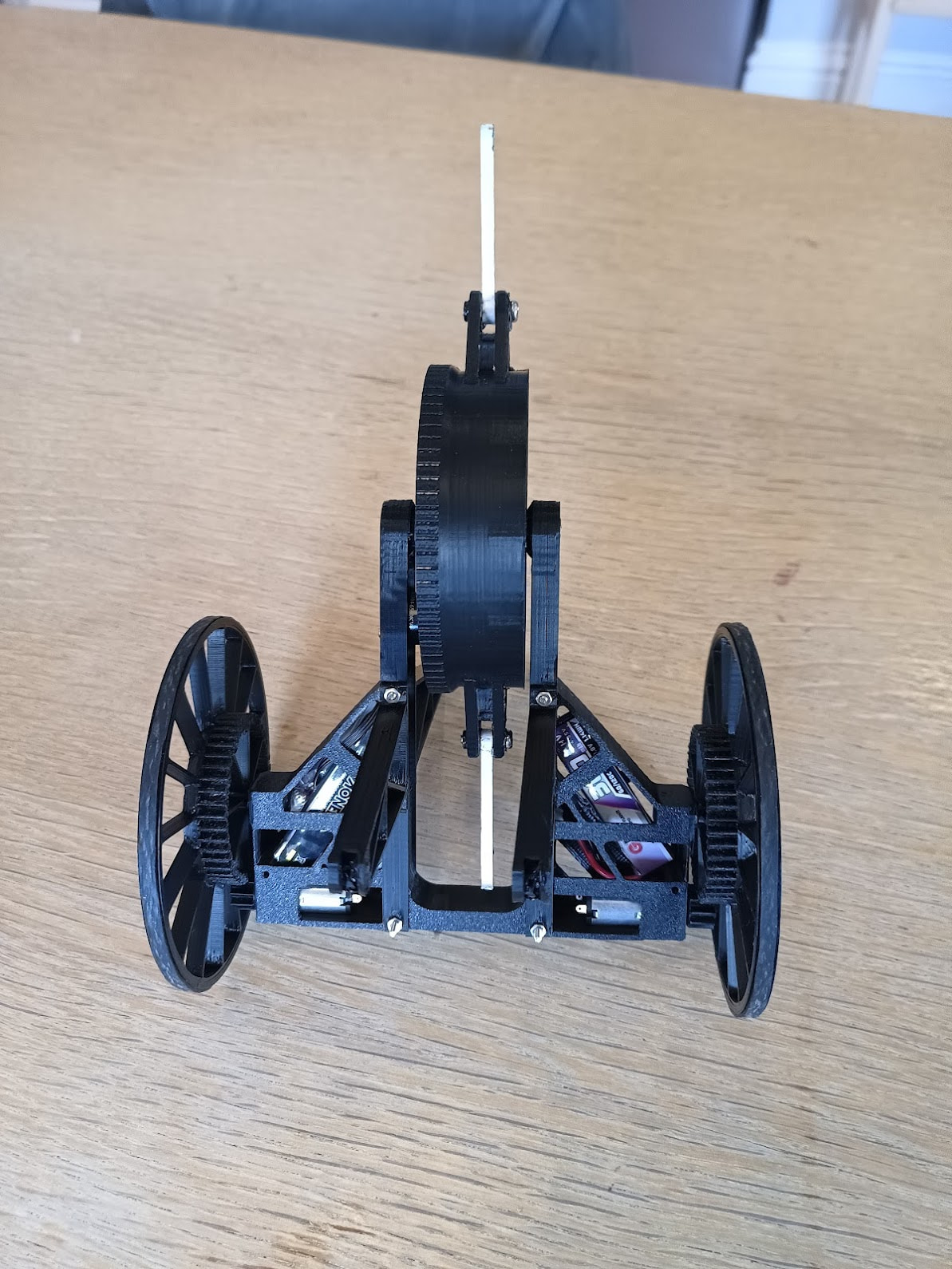
Malenki arrived, I’ve got it wired up, and driving.
The good:
drive works as expected.
it can self right from any angle.
Weight 148.15g
The bad:
The weapon motor is (as suspected) overgeared.
no weaon spinup and a hot ESC from trying..
solutions:
I have a lower KV 1104 motor I could try. (4300KV vs 6500KV)
I have the Grieveous power train. (2700KV)
I could add a 2nd stage of gearing (or belt)
I could integrate a clutch into the input gear so the motor can spin up quickly, with the weapon lagging behind.
all of these have disadvantages.. and I really wanted the >500mph tip speed.
any suggetions welcome.. (I may take a break from this design to mull things over)
Oof, 1104 is pretty tiny for a setup with that much drag. Ultimate Ninja runs a 1604 and even then it doesn’t take much preload on the hub to stop it spinning up. Have you re-programmed the ESC? The little emax BLheliS ESCs I use come with pretty conservative values by default, so needed all the sliders moving to maximum for enough startup torque.
Otherwise, I’m pretty sure a higher KV motor provides more overall power than a lower KV motor of the same size (something to do with coil resistance or inductance or something I still don’t really understand motors), so more KVs and more gearing would be my vote versus swapping in a slower motor. I don’t think a clutch is the right move either - I’ve tried it with Ultimate Ninja and while it does help the motor spin up reliably, any tuning for better motor spin-up ends up being so loose that it really badly impacts spin-up times, and produces a bunch of heat.
the lower coil resistance will reduce the resitive losses, at the same current
changing ratios is going to make things tricky… so I’ll have to have a deep think about where I put the motor.
I have lower KV motors I could try. which would be the simplist thing..
I could put a 2nd driveshaft on the input gear and then belt drive to a remote motor.. (giving me a similar setup to grievous with pully ratios and a bit of belt slip)
TBH thinking that motor would be able to spinup all that mass was somewhat wishful thinking..