Hi Everyone,
In the typical fashion I had intended to post this earlier this year, but various things got in the way, and I have made it to a grand total of 1 competition so far…
As AWS 75 looms, I’ve had to rush to rebuild my little(ish) antweight fleet and remembered that I’m yet to post modulant here.
Modulant was envisaged as a robot which can run with nearly any antweight compatible parts, so when new people ask me how they can get involved in robots I can just point them at something approachable which will work for whatever design they’ve envisaged. It’s also a nice way to use up my absolute mountain of spares that wont fit current revisions of my robots.
The design goals were as follows
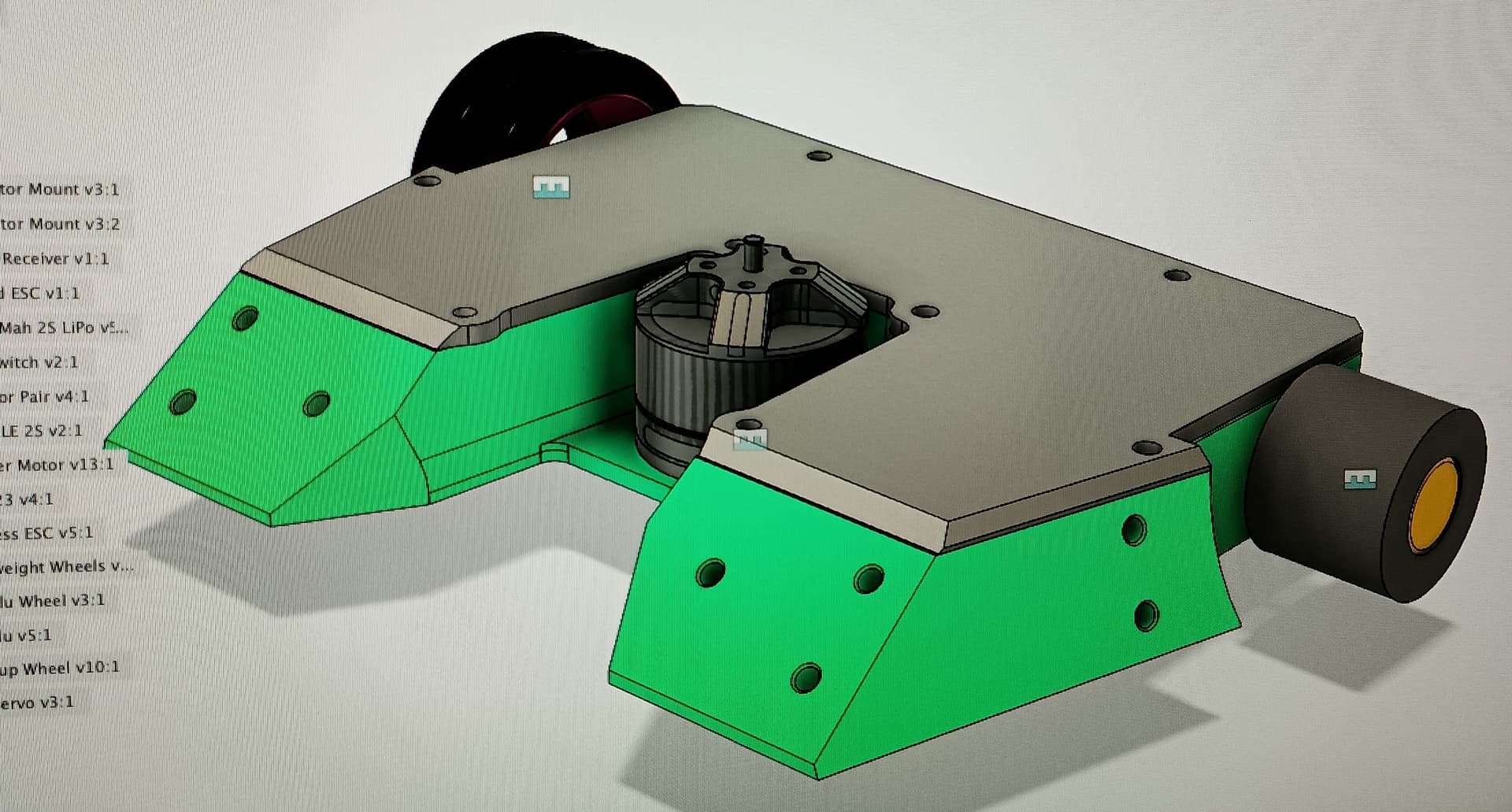
- Work with common antweight motors
- Work with any antweight wheel from 20mm to 46mm
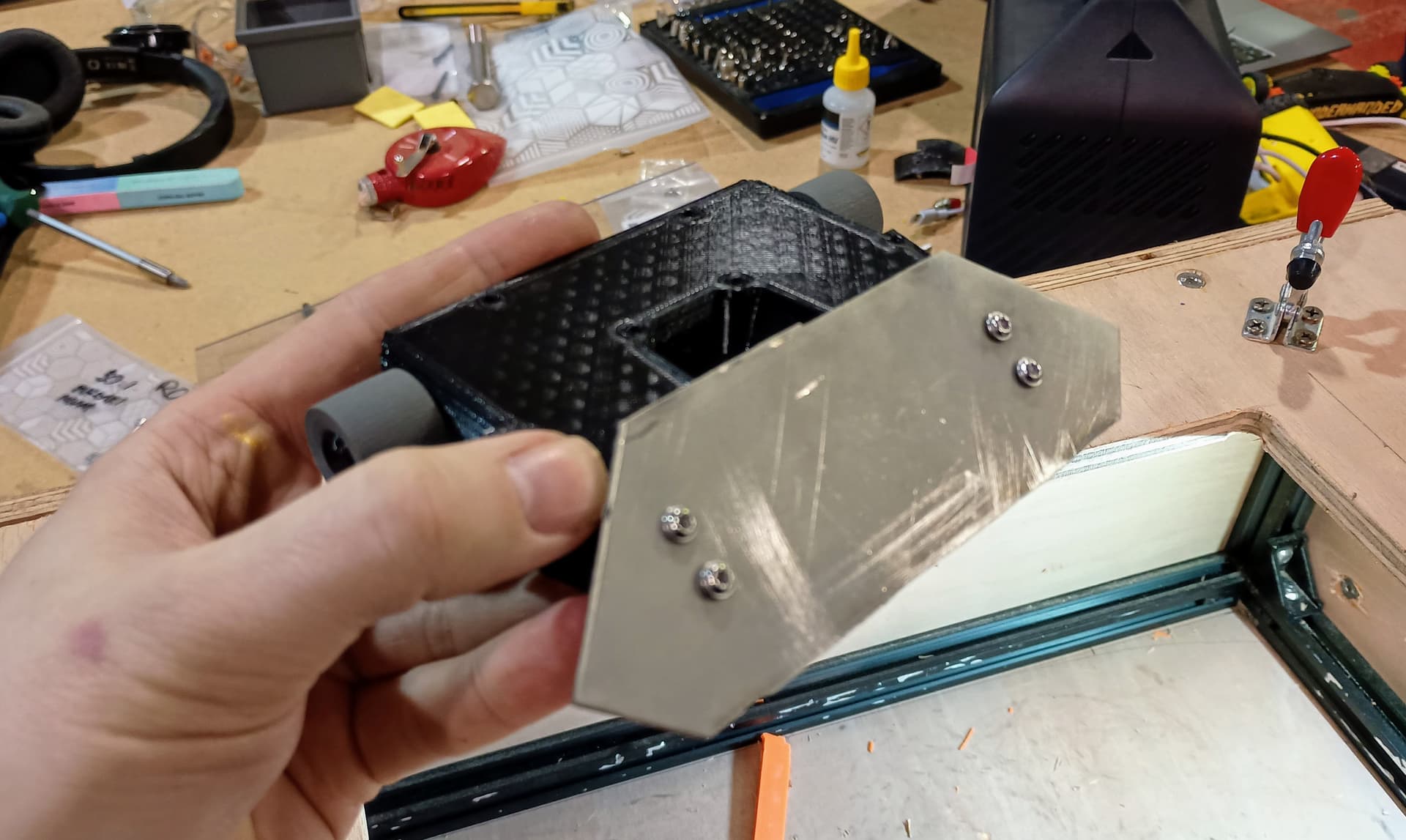
- Have customisation parts that can be made with hand tools
- Have upgrade potential on a single chassis
- Have at least 4 workable robot configurations
- Have entirely too many screw holes so you can fasten anything you can imagine to it
All of these combine to make something that I can print a lid and body for, then hand out to people as needed for practically free.
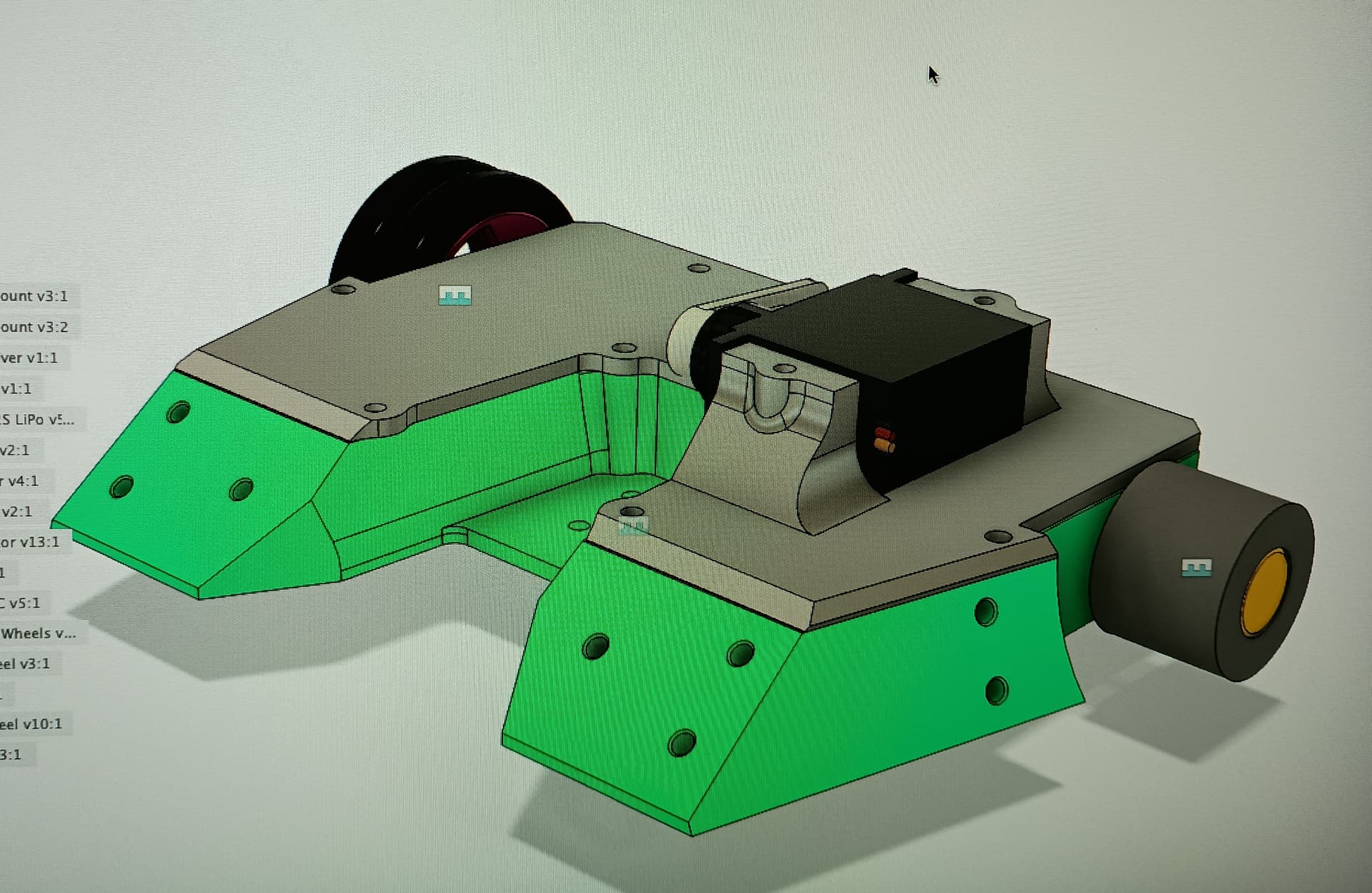
In January I started working on the first draft of this, with configurations for a lifter, vert and horizontal spinner.
This ended up working reasonably well, and designed a few more options before publishing it.
I designed a wedge to enter into a friendly rumble, and stuck a little piece of grade 5 titanium on the front as a joke.
I worked on this a little further to make some more configurations over the next few weeks

This worked out pretty well, but eventually I reached a point where I had to make drastic changes to the design and it needed a V2.
V2 built upon the first design, keeping the armour panels, shortening and widening the robot to allow for larger, easier to source batteries and stronger mounts for weapons.
I had started working with a local school on a robotics club to try and build a community local to me, and the battery changes were absolutely paramount as my little aging mountain of 180mah nano-techs can only last so much longer. The increased runtime means they can be used for STEM events without having to change the battery out every 12 minutes which is a plus.

As it currently stands the V2 has a flipper, lifter grabber, wedge, hammersaw and horizontal variants, as well as a silly dual vert option which I only ran once.
I still haven’t got round to making an M10 compatible lid but it’s in the works.
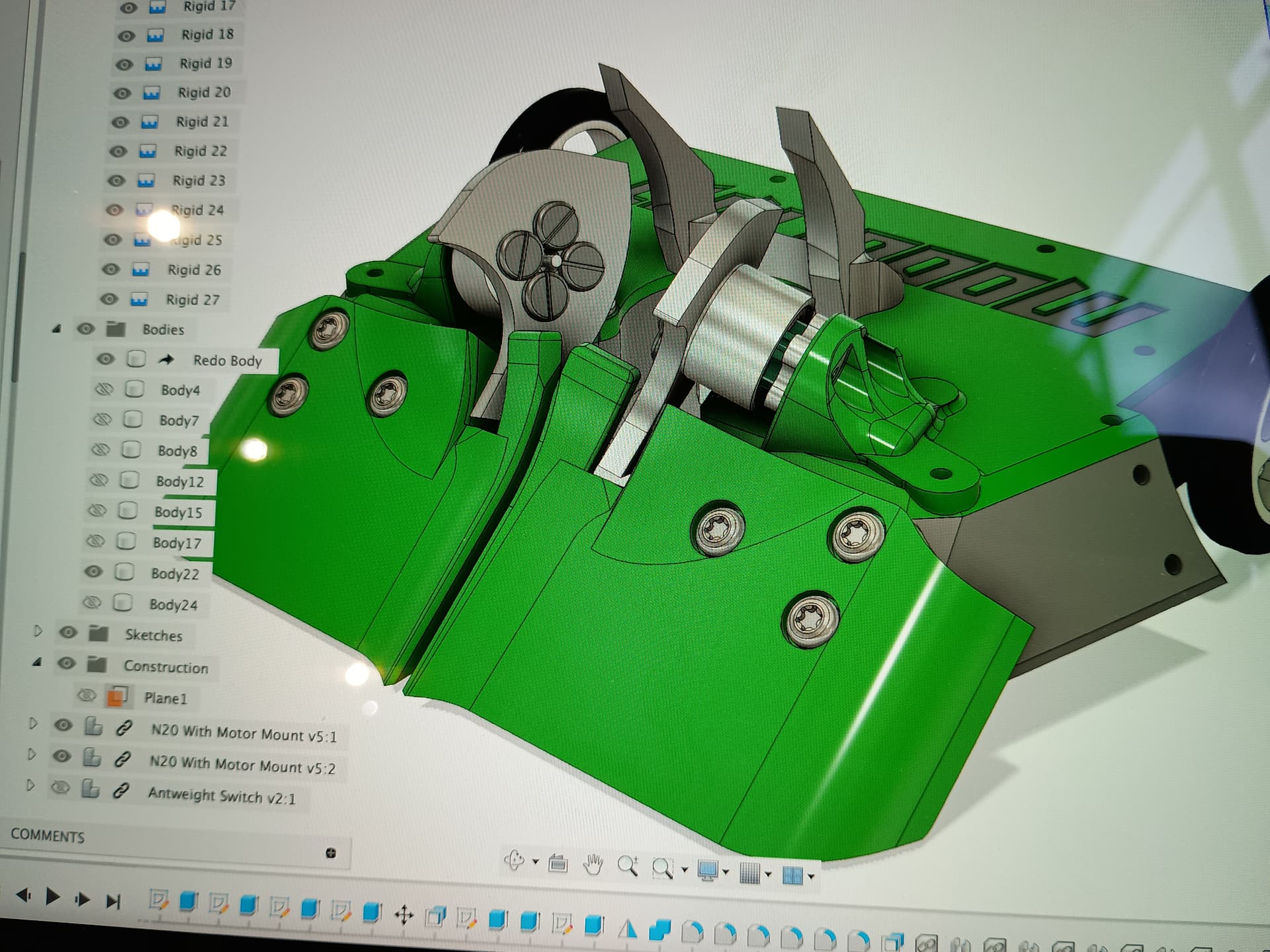
Said silly dual vert
Anyway, if anyone fancies giving it a try, I’d love to get some feedback! I’m always updating the design with new features, and it should work with any combination of BBB parts.
