it is tpu so if i can i might bend it in just before the bit is done. if it doesn’t work, then i’ll jus cut the cap bit off and insert the bearing, then i’ll weld the cap back on. The reason why i did this is because in the first prototype the bearing kept falling out, even with tolerances being tight. If there is a better way, I would love to hear it !
Here’s how I supported both ends of the motor on Ultimate Ninja:
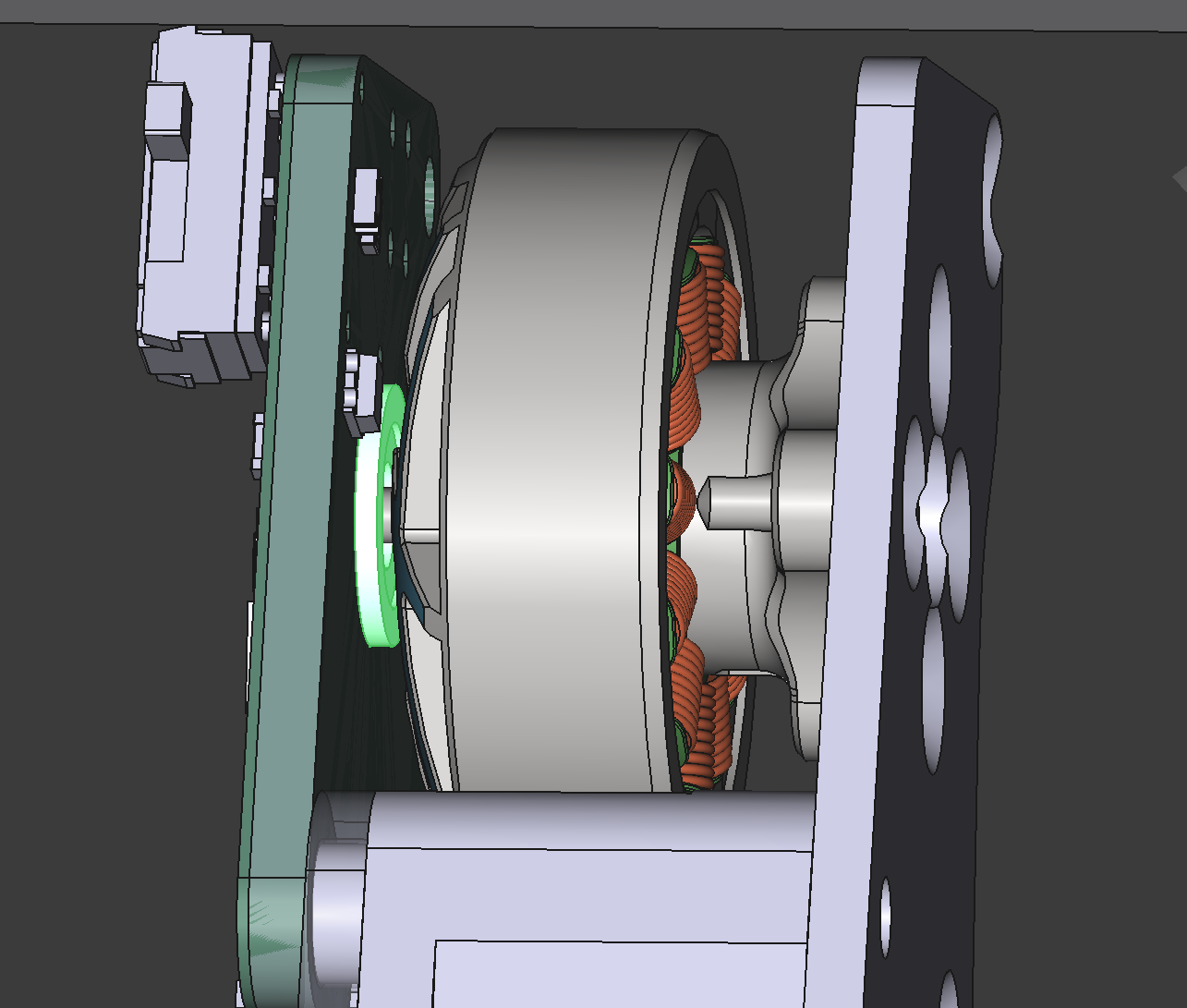
The motor is screwed to the frame piece on the right side of the screenshot, and a bronze bushing in a little holder (highlighted green) sits in a hole in the opposite frame piece, which is slid over the shaft and screwed into place, clamping the assembly together.
To do the same kind of thing on yours you could maybe make the bearing side of the upright a separate piece, with either a regular bearing in a blind hole or a flanged bearing in a through hole (either way so it can’t wander out backwards). Then you attach the motor to its mounting upright, slide the bearing over the shaft and screw the supporting upright into the rest of the chassis.
1 Like
Thanks. Do i even need a bearing/ use a bushing instead of a bearing? What type of bushing should i use?

That’s a very large cast bearing block. Not really what you want - though I suppose the theory is sound.
A small flanged ball bearing would be my go to.
1 Like
I used a bushing for a couple of reasons; they tend to be smaller than a bearing with an equivalent inside diameter and I needed the extra space for a TPU vibration-damping bongler (since it’s going straight into the ESC…), my motor has a 1.5mm diameter shaft and that’s on the small size for ball bearings, and (most importantly) I don’t have any 1.5mm ID bearing in my junk box, but I do have some 1.5mm ID bushings!
The BBB 1806 motor has a 2mm shaft, so you’ll probably want something like this - they are available cheaper elsewhere so do shop around!
1 Like