A few months ago I had an idea for a new 'bot with a single wheel in the middle and two horizontal spinners either side of it. The single wheel provides drive, and the steering comes from changing the angular momentum in the spinners.
This is obviously a very silly idea. Nonetheless, I roped in two friends and set out to pursue it!
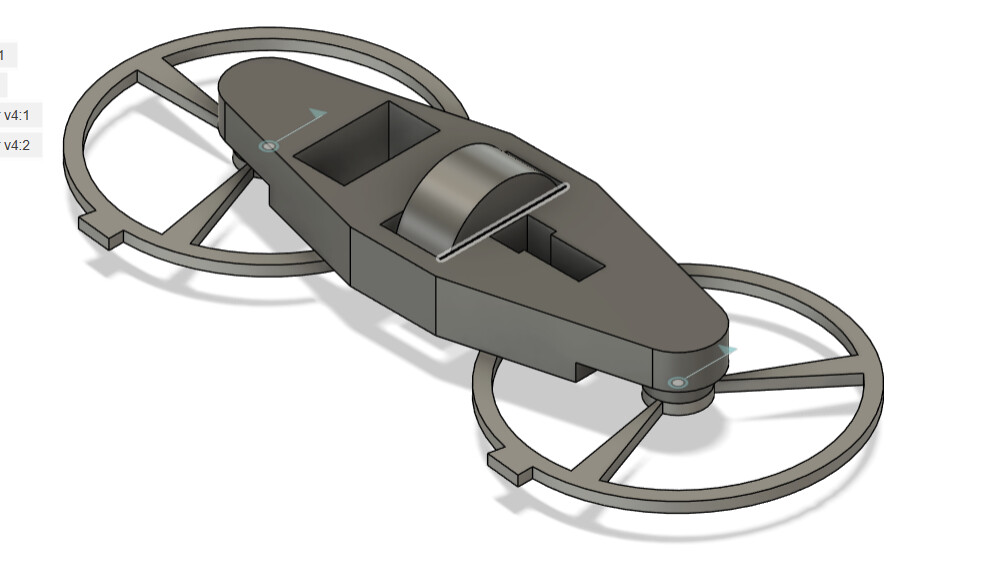
My original CAD sketch, just to illustrate the idea.
Part One - Centrifugal Farce
I really want this to be a beetle, but it made sense to start with an antweight prototype. Partially to see if this is even feasible, and partially because it’s much easier and cheaper to iterate through design ideas at this scale.
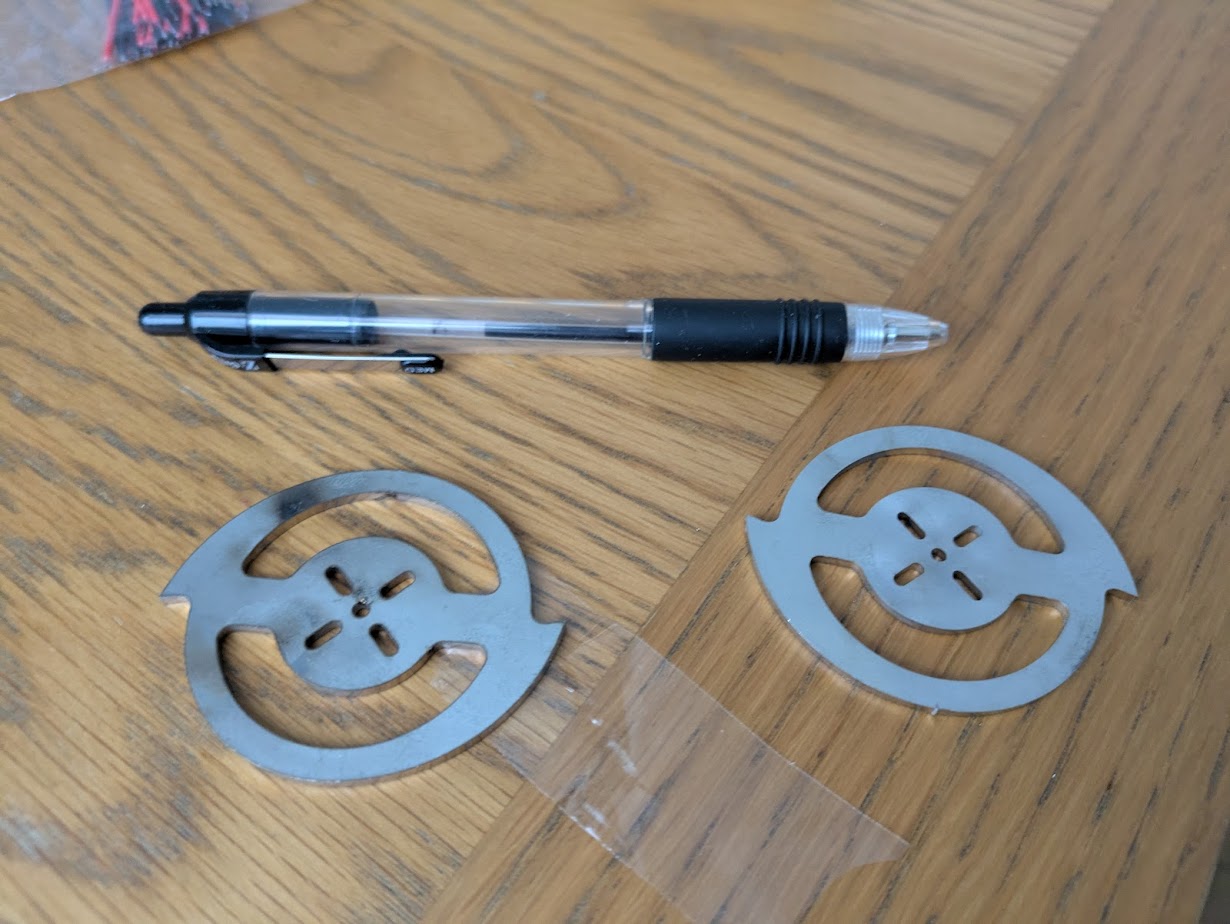
As with many antweigths, the biggest challenge was weight. For want of any real idea of how heavy a spinner needs to be to do damage I bought a pair of the lightest discs in the Monsoon Robotics shop, coming in at 21g each.
Coupling those to a pair of the standard ant weapon motors + ESCs from the BBB shop brought the weapon stack to ~82g. Add in a battery, an N10 + Brushed ESC for the drive motor, and an ESP8266 for control, and we were left with ~24g for the chassis. That’s not a lot of grams.

We originally wanted to have one spinner mounted ‘upside-down’ as an undercutter, so that we’d be able to hit at different heights, but we just couldn’t get this shape small and light enough. After our best shot died on the print-bed, we sacrificed our original name choice - Centripetal Farce - to its memory and rebranded as Chinoops.
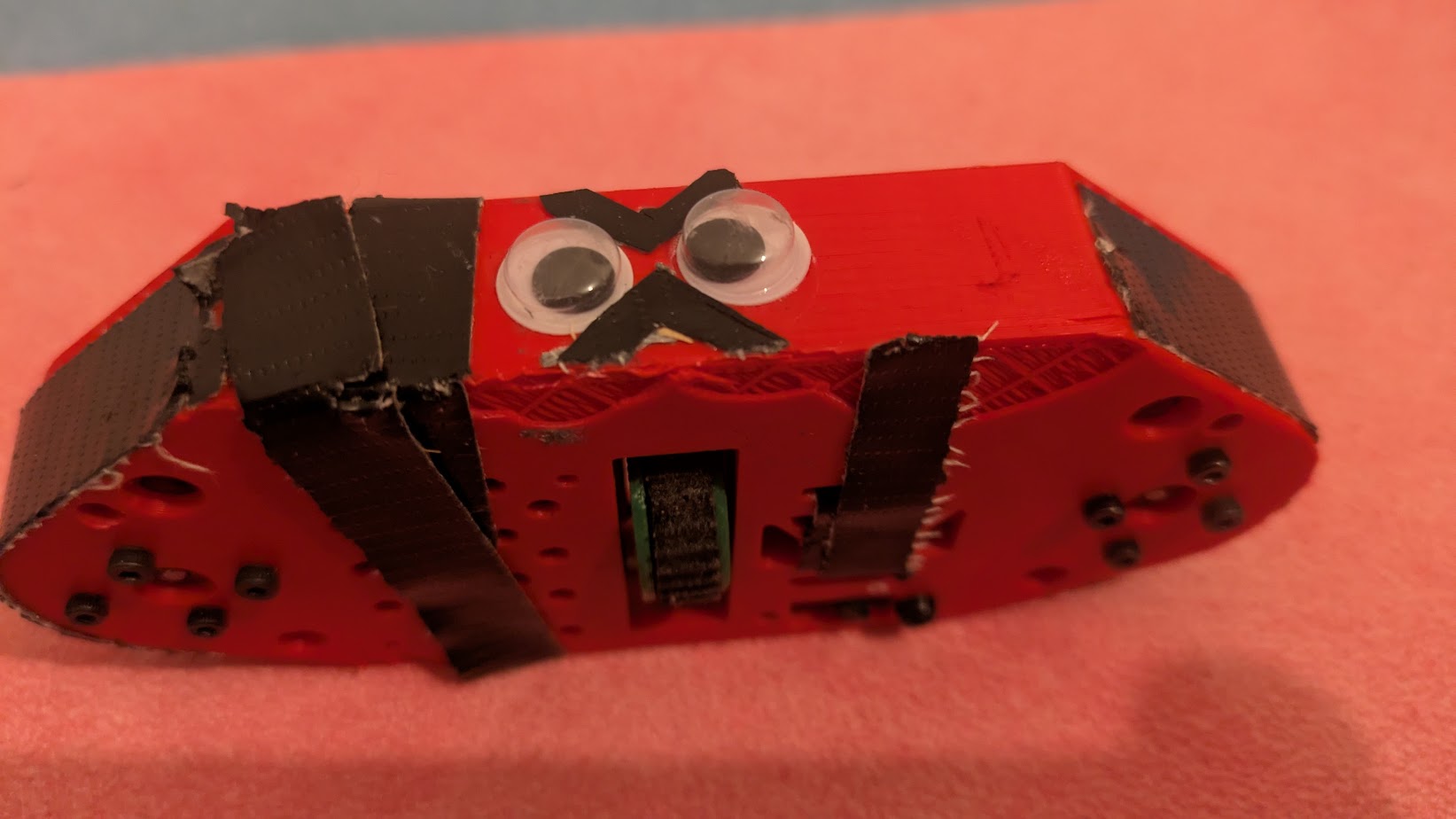
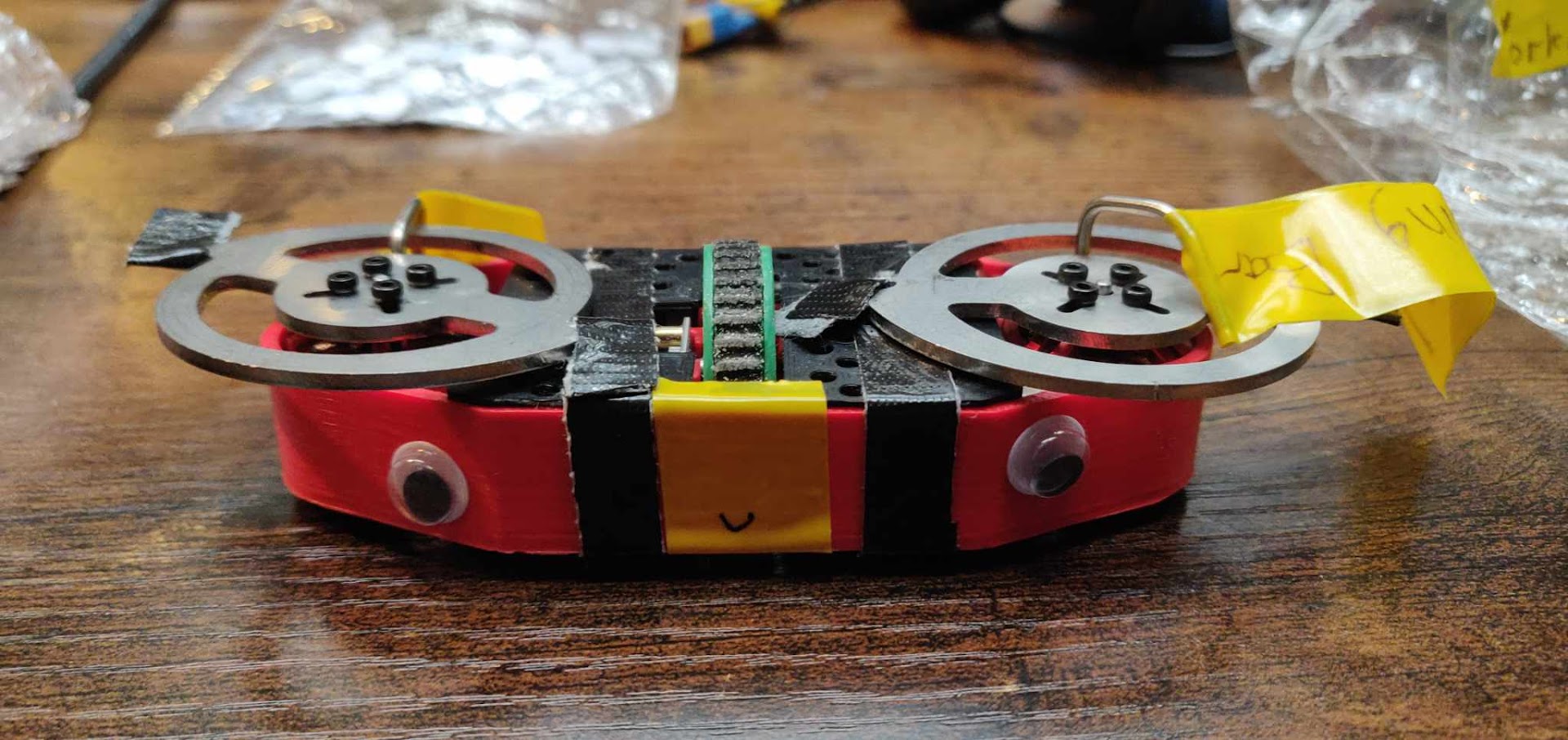
Even with the much simpler symmetric chassis configuration, it took many iterations and much pondering about component positioning to get below the limit. However after several late nights with Fusion and much resoldering we made it underweight.

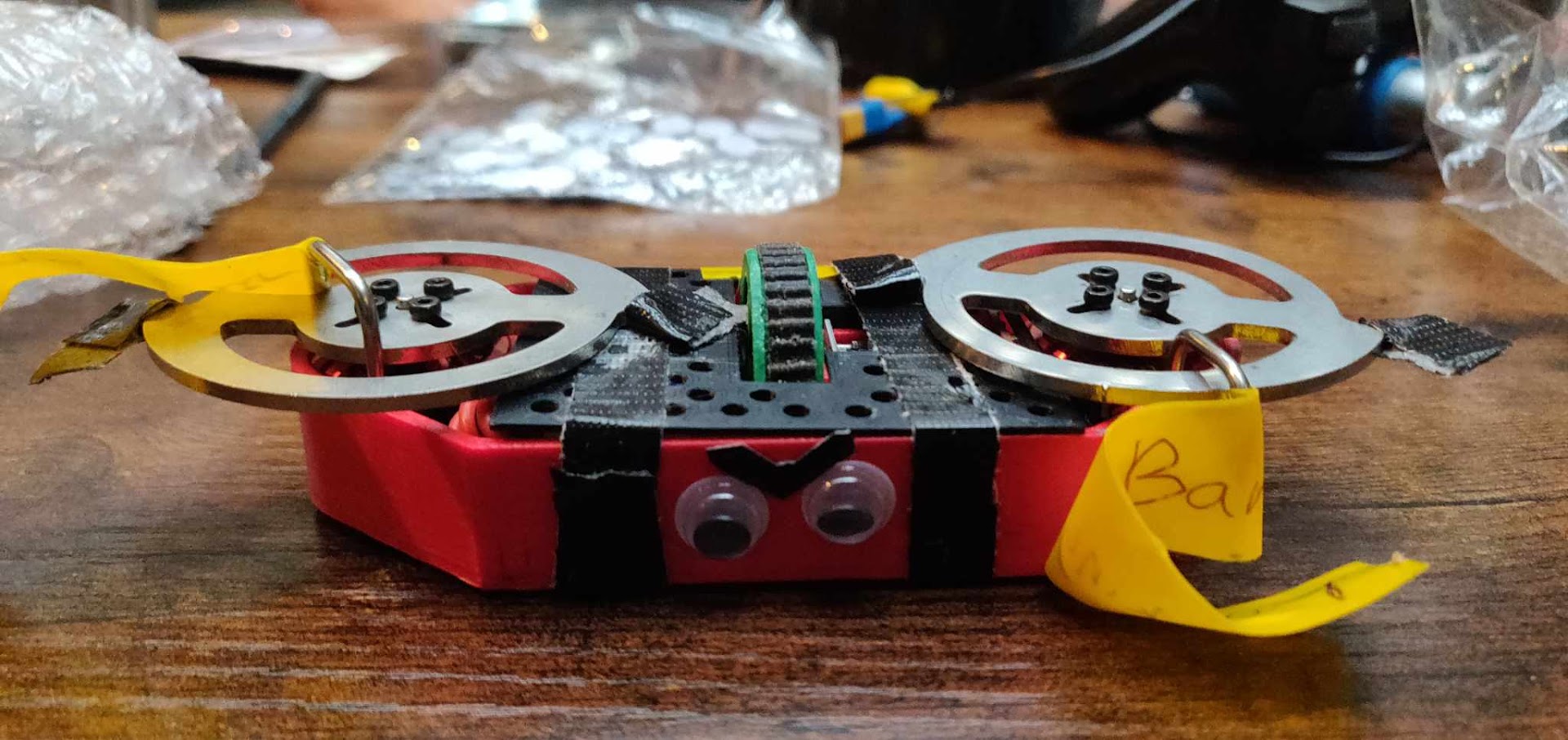
3 whole grams underweight infact! (Most of which were immediately spent on googley eyes and decorative/protective duct tape).
Meanwhile the coding had mostly been surprisingly straightforward. Here’s some footage from our first test to see if turning could be achieved:

Yes, my test-box is a reinforced draw… watching this back I realise that there really should be something heavy on top of the 6mm polycarb lid just incase. Lesson learned.
In addition to basic steering and spin-up, we decided there should be a button that would stop both spinners incase the speeds ever got really weird and we wanted to reset. This had the fun effect of undoing all prior steering in a single sharp jolt (as happens at the end of the video).
Unfortunately, the first time I tested this feature the back-emf from the motors killed the ESP, bringing the project’s ESP death-count to 3.
Adding a BEC resolved this problem.
A few more coding tweaks (including an inverter switch) and Chinoops was ready for a fight in a brewery. Part 2 (learnings from BBBxZeroDegrees) coming soon…