TLDR: Through some friends at Uni, I found out about an antweight competition, so I started modelling something in Fusion to compete, got a little carried away, and here I am now
I have printed out a few versions while designing, but I’m aiming to build a complete working unit in a couple of weeks once I’m back into the flow of University (for testing the drum, there is an arena at Uni, and I am looking into options for making a test box). I have made a BOM & Mass Sheet to keep the design under 150g, and once I’ve built and tested it, I plan on sharing the design on GitHub/Printables/MakerWorld. I’m also dabbling with simulating the drum to get an idea of how it’ll behave. Currently made sure, through FEA pending actual tests, that it won’t deflect too much when rotating, and the next steps I want to take are to learn the basics of Ansys to simulate impacts on the drum. I have some ideas to try to make it withstand direct hits from metal vertical spinners.
Some current features of the design:
Interchangeable TPU bumpers (several variations)
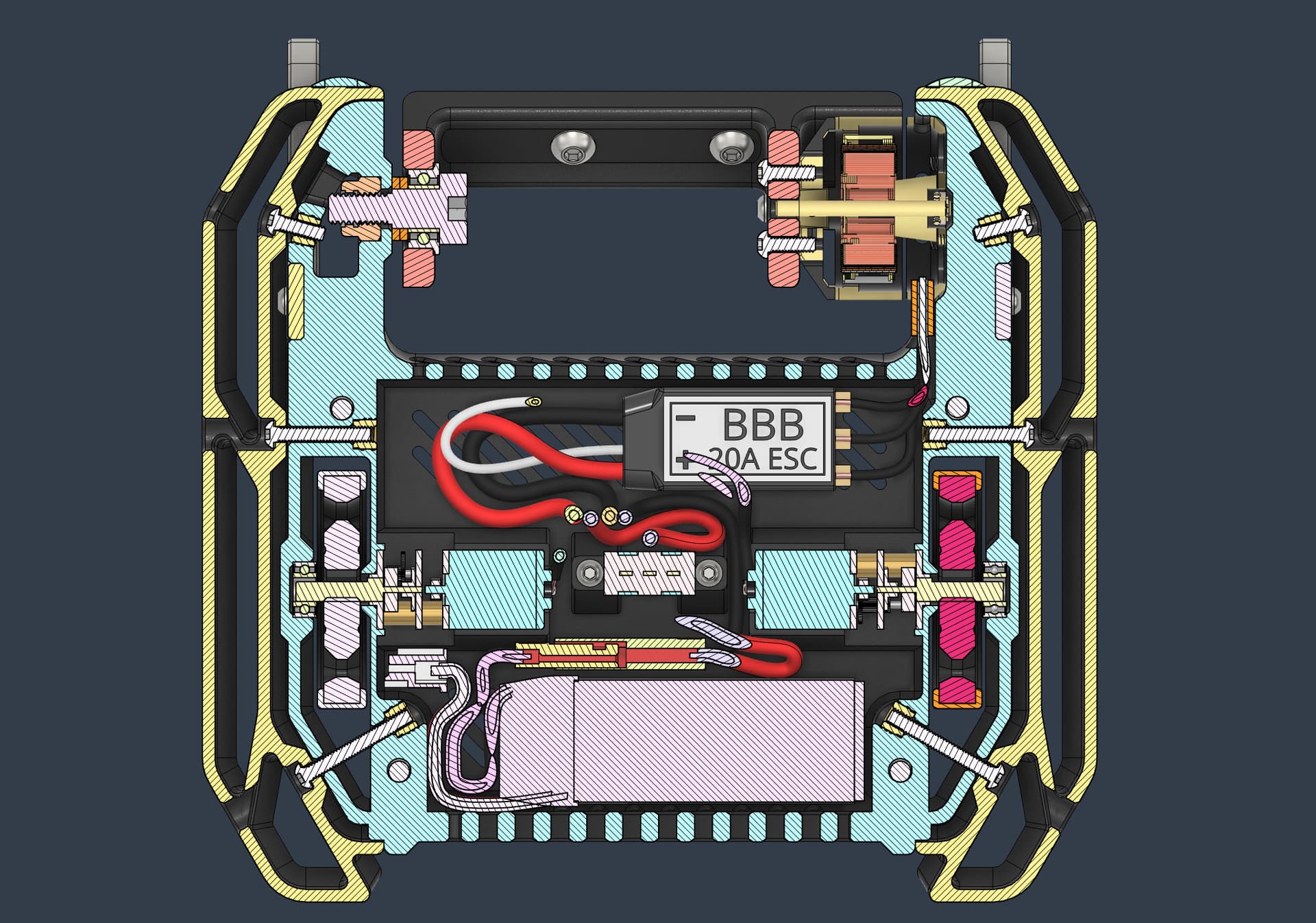
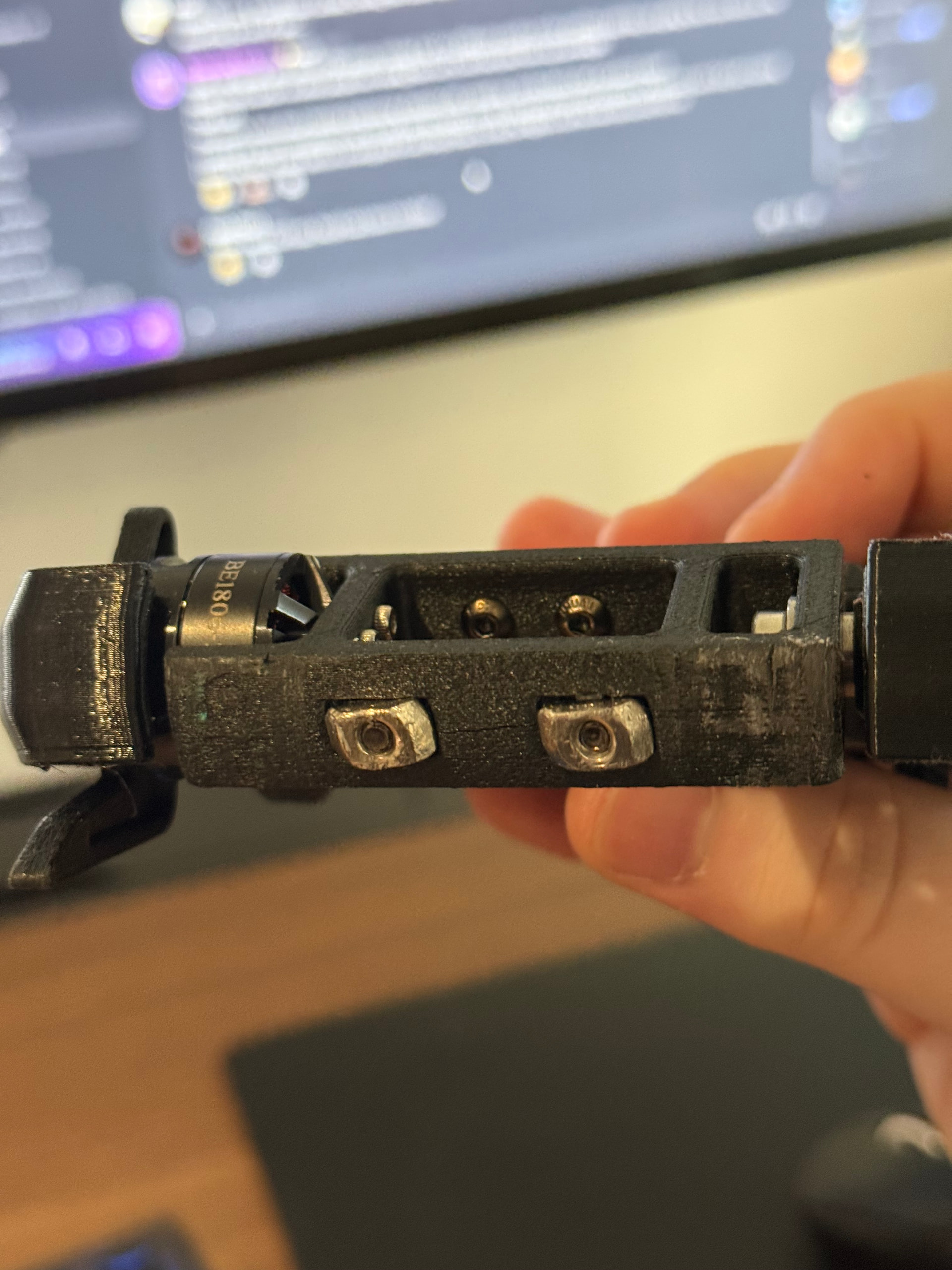
Double shear N10 motor mounts (see cross-section below)
One thing to bear in mind with regard to mass is that 3dp parts aren’t solid (with some exceptions like 100% infill), so you can’t rely on Fusion to get an accurate mass for them. Best thing to do is put the part into your slicer of choice, slice it without any brim or supports and see how much material the slicer says will be needed.
Yep, been using Orca Slicer to get a more accurate estimate of the mass/volume of the printed parts with modifiers, etc. (Also, in the mass sheet, made it so I can change the density of the filament, currently planning on using Nylon-CF and some 68D TPU for the bumpers)
PA CF is a decend choice but I suggest a softer TPU for the bumpers. 68D, like AMS TPU from Bambu is very brittle and not suitable as armour. I did that mistake.
Have made a master CAD assembly with all the components. I think it’s an appropriate amount of scope creep . Also found out that the antweight event at Uni is 200g, so I’m going to put that extra 50g into a titanium drum.
Hey @MossiBrossi, this design looks awesome — great work!
Just wondering, are the CAD files public yet? If not, would you be willing to share them? I’m pretty new to antweight combat robots and your design looks like a great place to start learning from and build off.
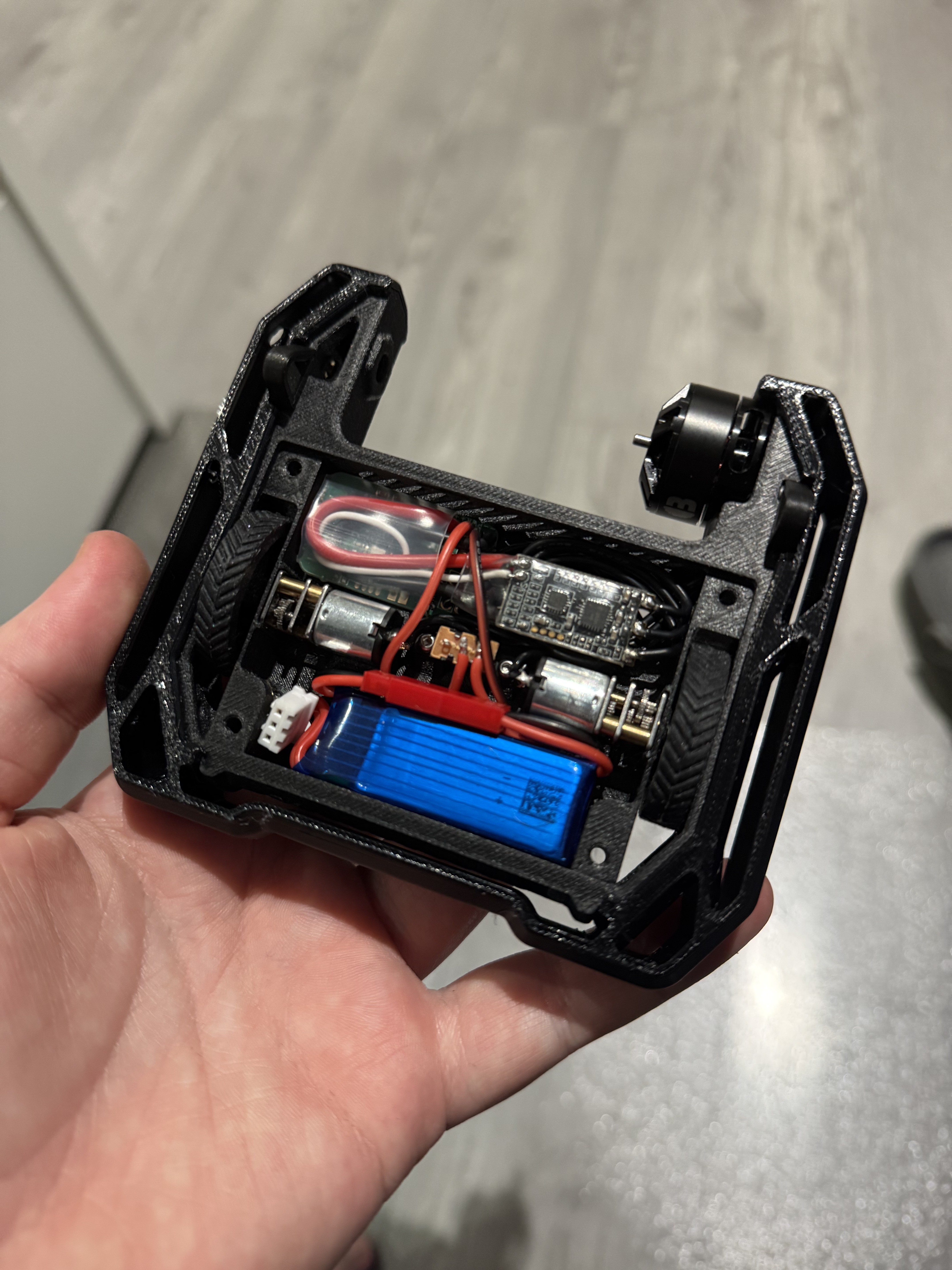
First off — the bot is excellent. It’s very well thought-out and you can immediately see how much work went into the design. I rebuilt it and made a few modifications to suit my needs.
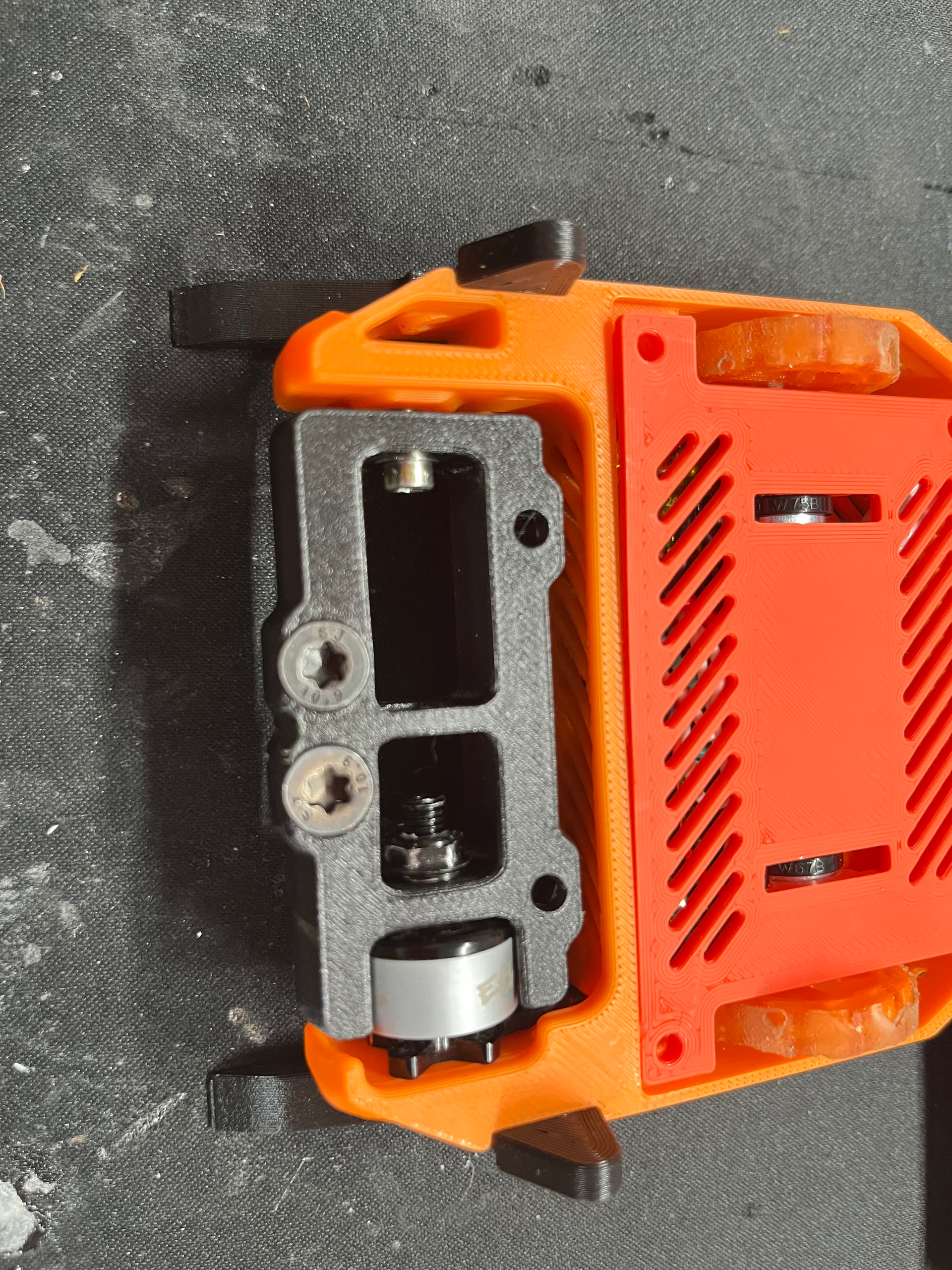
One issue I ran into was the wheel clearance: the space for the wheels is very tight, which makes swapping tires between fights difficult. To fix this I added a channel that allows the motors to be lifted out from above, so you don’t have to fumble around the power switch when servicing the drive.
I fitted a fully plastic weapon driven by two 1104 motors and modified the weapon mounts accordingly.
I’m not a fan of heat-set inserts, so I reworked the mounting holes to accept special mounting screws instead.
I fought it last weekend at the Hack n Make Nürnberg.
Awesome to hear, been meaning to post an update for a while but been swamped in mid-semester Uni (where every unit decides to put it’s coursework deadlines… yay…), guess now is a better time than any.
Probably worth talking about tyres first as have made the most changes there, been experimenting with silicone poured tyres and after a few iterations landed on something pretty good. Final version have a grub screw embedded to securely hold to the motors. Also did make tweaks to the motor mounts on the frame as had noticed swapping tyres wasn’t easy but now is pretty quick (have a bit of excess wires for the drive motors so they can be removed without pulling everything else out with them). Am getting ~190g static pushing force and heaviest object it’s moved so far was ~750g.
Have fully built and tested the bot as a whole now, made a lot of tweaks across the board for clearances and just some general optimisations. Only thing left to do is order titanium parts now I’m happy with how everything fits together. Was pleasently surprised how long it lasts on the 300mAh lipo.
Once it’s combat proven (sometime early December hopefully) planning to release it more formally than a sparsley updated GitHub repo . But in the mean time, been practicing driving it and tuning the drive response from my TX, need to diagnose why one motor has more resitance than the other but besides that have gotten it driving nicely now. Only planned change I want to make is adding some sort of feature to the drum so it sounds more intimidating when it’s spinning.
Printed the above in Bambu PAHT-CF and Eryone 95A TPU, also verified that the 150g configuration (not the one above) comes in at 149g, only 2g heavier than I had estimated with the mass sheet which I’m putting down to the excess wire I added.
Nice to hear that. My bot is underweighted with 140g. I hope I can get the right footage, so you can see how it performed. I only have a test footage https://youtu.be/GAWbUB07vM0?si=FGhO77Aufq26MDpI
Went to the Uni tournament in December, and ended up going undefeated with, if I remember correctly, ~9 KOs up against bots upwards of 500g as they ended up not being very strict on the weight limit (I was the only sub 200g bot there, but the moulded silicone tyres meant I could still push around much heavier bots).
Only damage I ended up taking was a hairline crack in the PAHT-CF drum (but not all the way through and across layer lines), between two of the teeth bolts but besides that, it stood up against direct hits to metal spinners remarkably well.
Was also at SMRRF '26 and saw Accu had an ant weight arena, unfortunately couldn’t do any real combat as they didn’t want permanent damage on their bots so they could let people keep using them through the event, but I was allowed to tear up some failed prints and a monster can in their arena.
Have been swamped with Uni work and my dissertation currently, but do hope to pick up again after summer with either improvements on this design or a new ant weight entirely, I like the idea of a 4WD control bot atm.