Been a busy few weeks for me as I get Overclocked V2.1 ready for Robodojo this weekend!
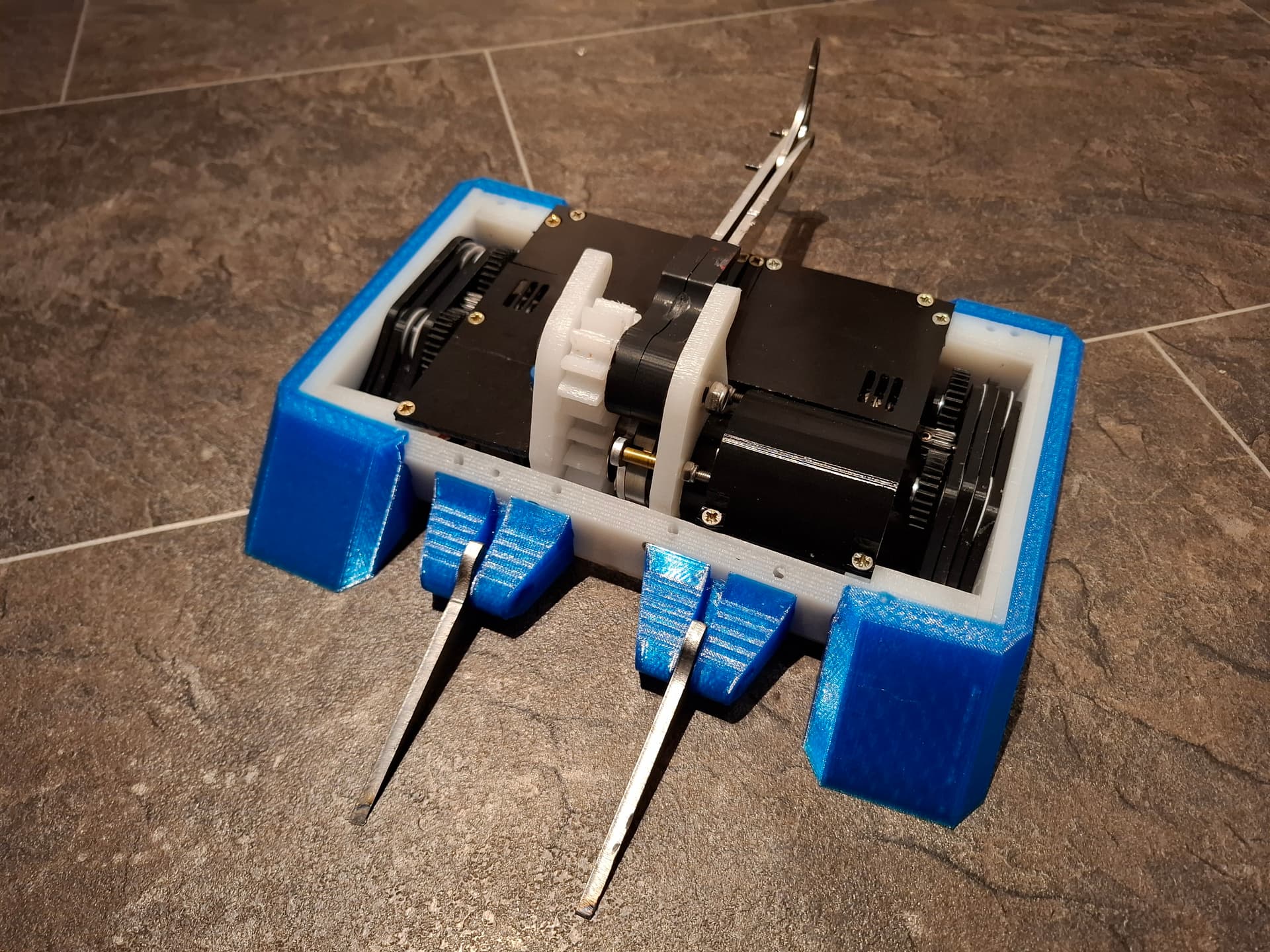
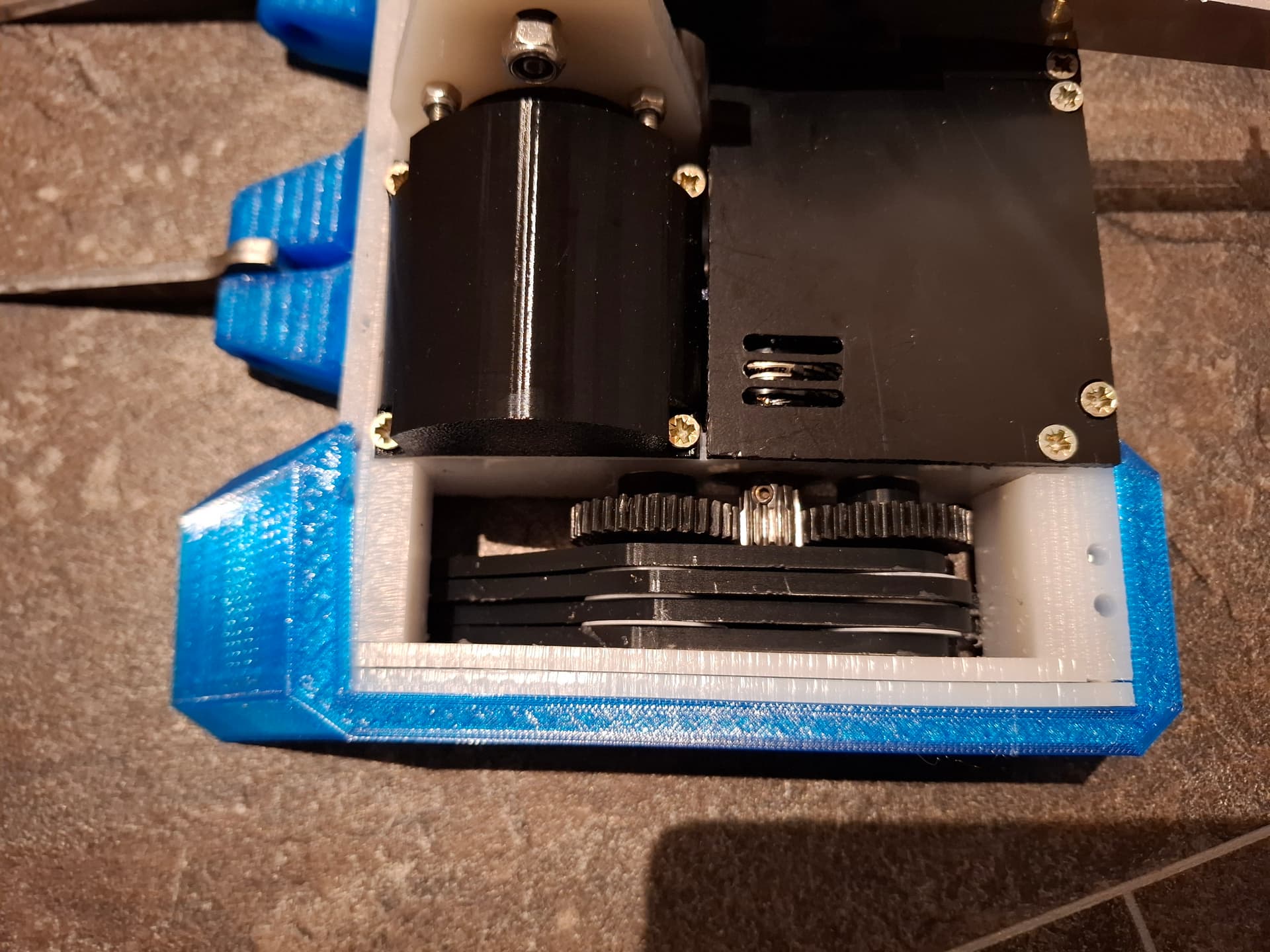
First things first, a new gearbox arrived that is 19:1 as opposed to the current 14:1 gearbox. It also ended up being significantly smaller (and actually 42mm), which facilitated making the bot 16mm narrower.

The battery has been increased in size to a 720mah 4S LiHV battery (thanks Rob!), to make room for this the cutout in the back of the chassis has been filled in, so gone is the U-shaped chassis for a plain box.
The fork mounts have also been beefed up, with the tabs going int othe front plate being double widge should offer a bit more resilience.
But the thing that’s been occupying most of my time on this rebuild are the legs. In order to solve the melting issue, I decided to try machined legs out of HDPE.
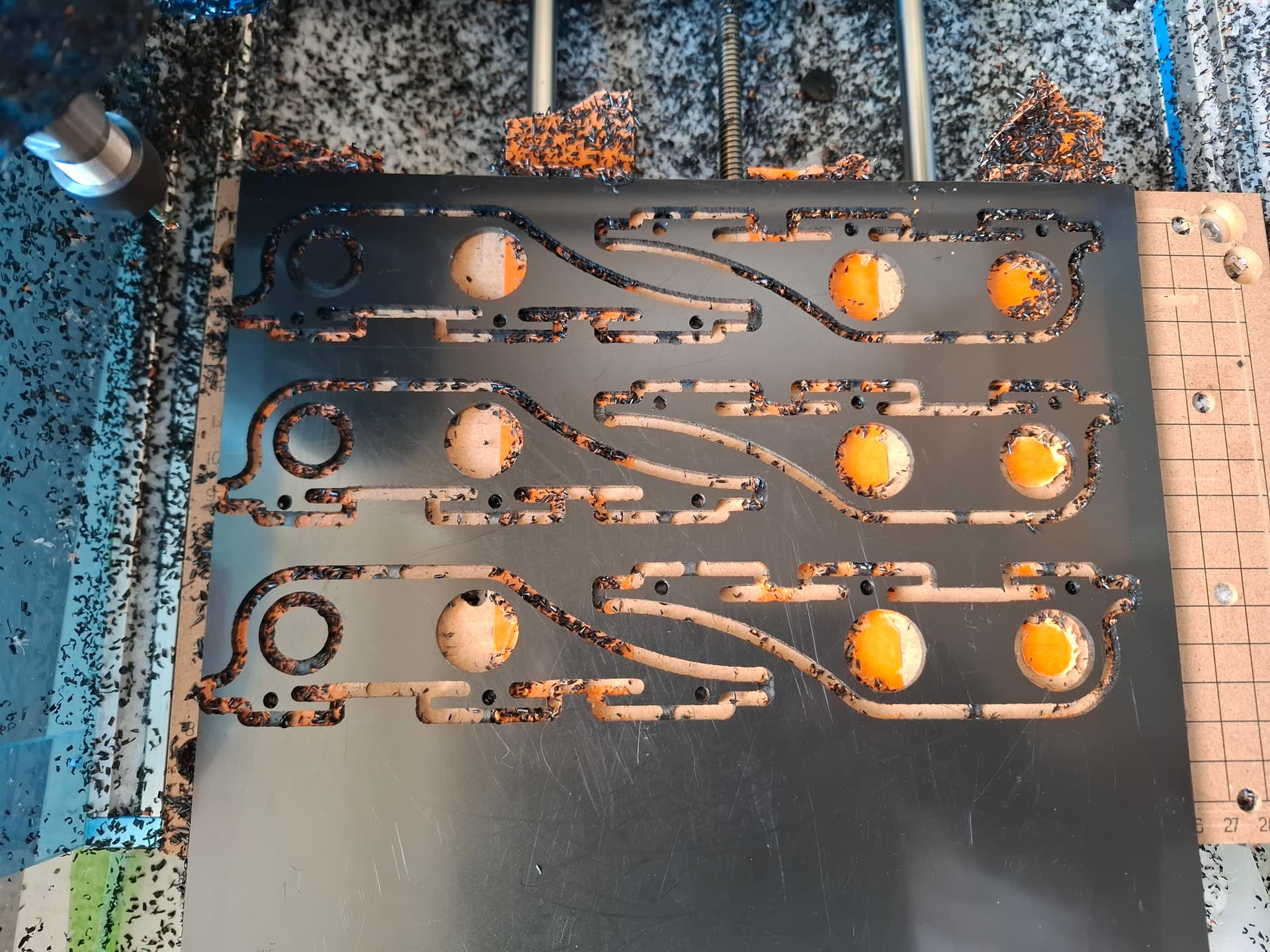
These look really good, but it turns out that 2 part PU really doesn’t like to stick to HDPE. I went through several iterations of leg designs, even drilling in plane after the CNC was done so the PU would flow around the HDPE to create a mechanical connection instead of just relying on adhesion, but nothing kept the PU on the legs, expecially when I tried to drive.
I ended up reverting back to PLA-ST legs (but with improvements to the PU/leg interface to include a mechanical connection now), with the addition of 0.5mm PTFE shims in between each leg. This should give the legs a smoother friction surface to rub against and space them out a bit to further reduce the friction surface. Hopefully that does the trick.