Where to begin?
If you don’t already know… I’m a firefighter and love hydraulic rescue tools… so a jaw of life/crusher style bot has been my main focus for the past year.
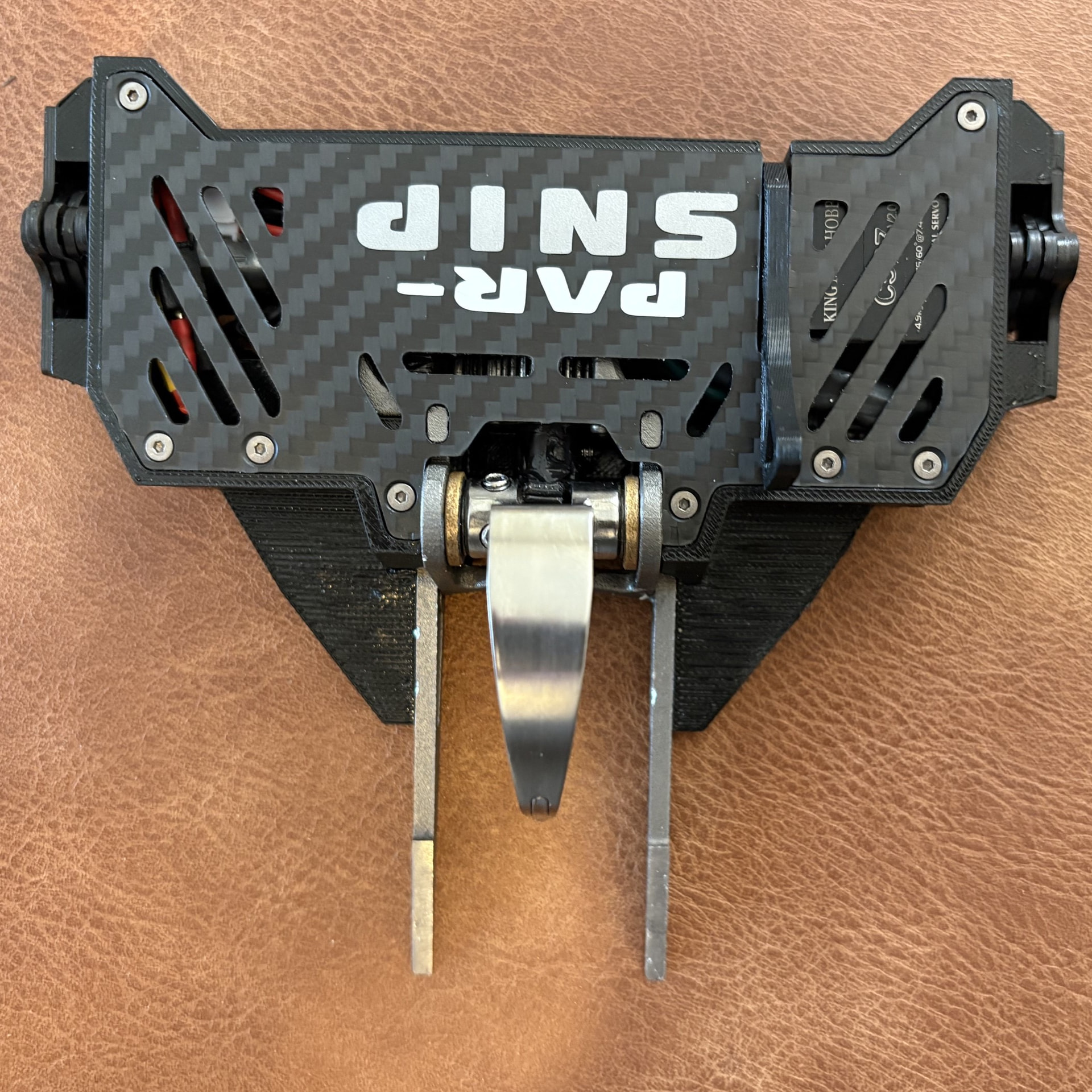
So, I present to you… the next in my root vegetable themed bots… PAR-SNIP!!!
I’m not sure how many parts this build log will be, but I plan to cover all my findings from this project and future developments as I try to hone this into something vaguely competitive… and not the slow-moving brick it was at the BBB June social 2026. I hope you will find this interesting and that maybe someone can take this even further to the ultimate crusher bot!!
Let’s start with the bit everyone will be most interested in. The gear train and where the power comes from.
When I first started on this, I quickly settled on using a 50kg.cm servo as the core of the bot. Seemed like a very straightforward way of getting a simple up and down motion, and easy enough to gear up to get something torquey. Design one was a 0.8 mod gear train, which was something like a 13t > 25t compound to 12t > 30t. Which I think math’d out around 250kg.cm for the final output.
This first version had a few limitations; I was limiting myself to the stock servo for easy replacement, a limited active angle from the servo output of only 270 degrees and it was very, very, heavy. The servo alone was 65g.
(just in case you aren’t too familiar with gear ratios. The more reductions you have the more torque you can produce… but… and it’s a BIG BUT… at the proportional cost of speed and in the case usable range)
This first set up only had a 60 degrees arc of motion, closing in an estimated 3 seconds, with 250kg.cm theoretical max, and it can be back driven (so, if you want to hold someone with the full force of the system you have to continue to apply power to the servo, drains the battery fast and risks cooking the motor) Not bad but we can do better.
After some brutality to the servo…
I took out at least 20g, all the casing is gone, and I have removed the potentiometer and the brain of the servo. Now it’s just a motor and some gears. That gives me 360 degrees of infinite rotation. This now removes my previous limited arc issue. Now it’s just a balance between speed and power.
I had considered a pinion system, although one of the more efficient options, its heavy and that key point from before… can be back driven…
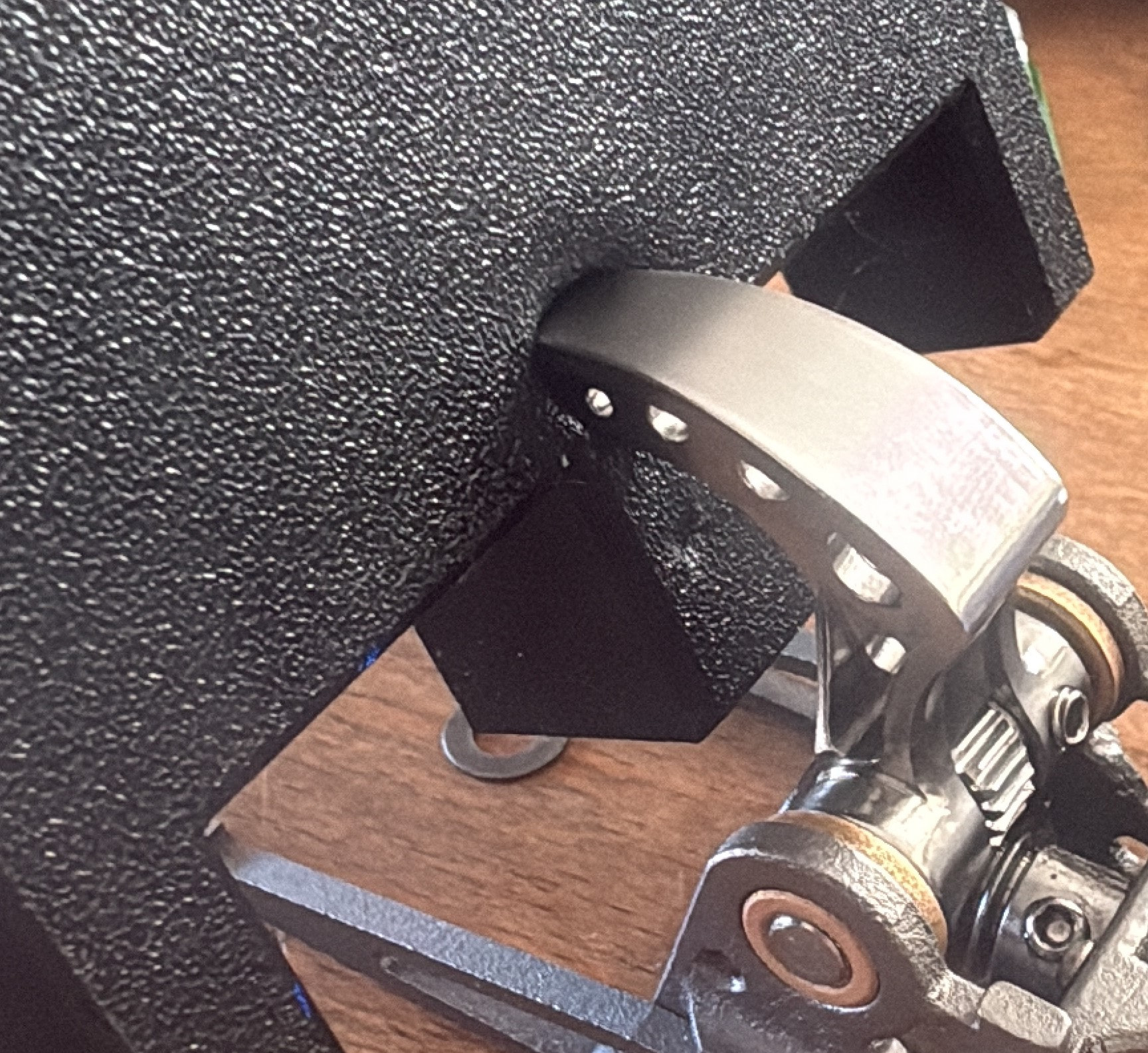
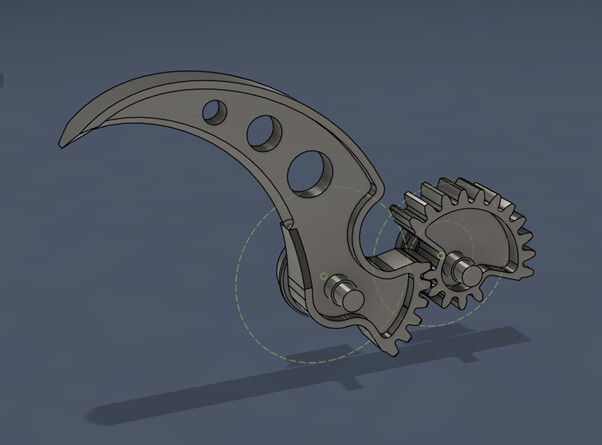
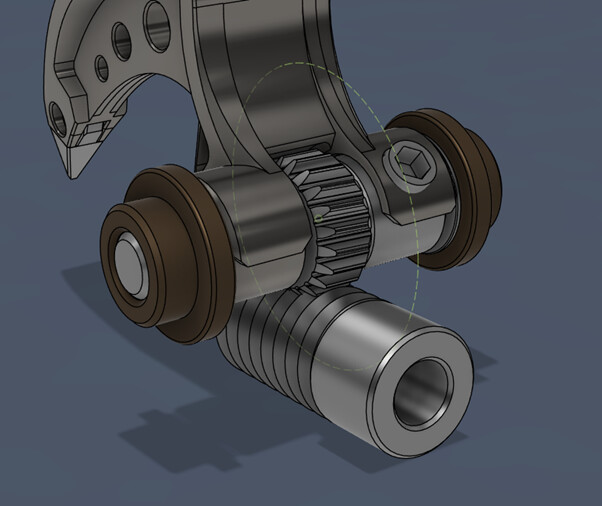
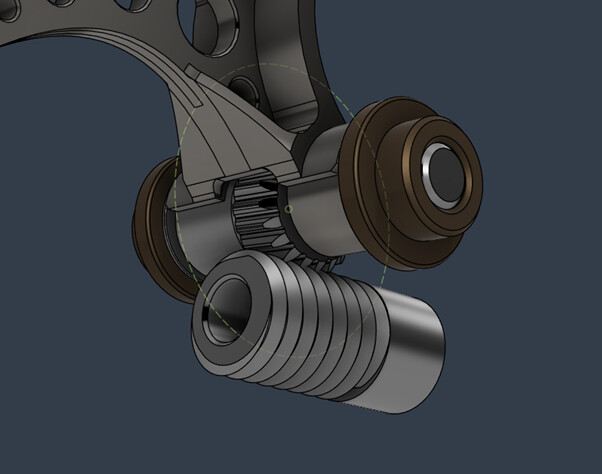
That left me with one option really and that’s the worm drive. Not super-efficient that’s for sure but can utilise that full rotation. You can expect a loss of around 40-60% with a badly set up, poorly lubricated system. BUT… they ‘can’t’ be back driven (if it closes… it stays closed! no power required) and you can get some crazy ratios in a very small compact and lightweight form factor.
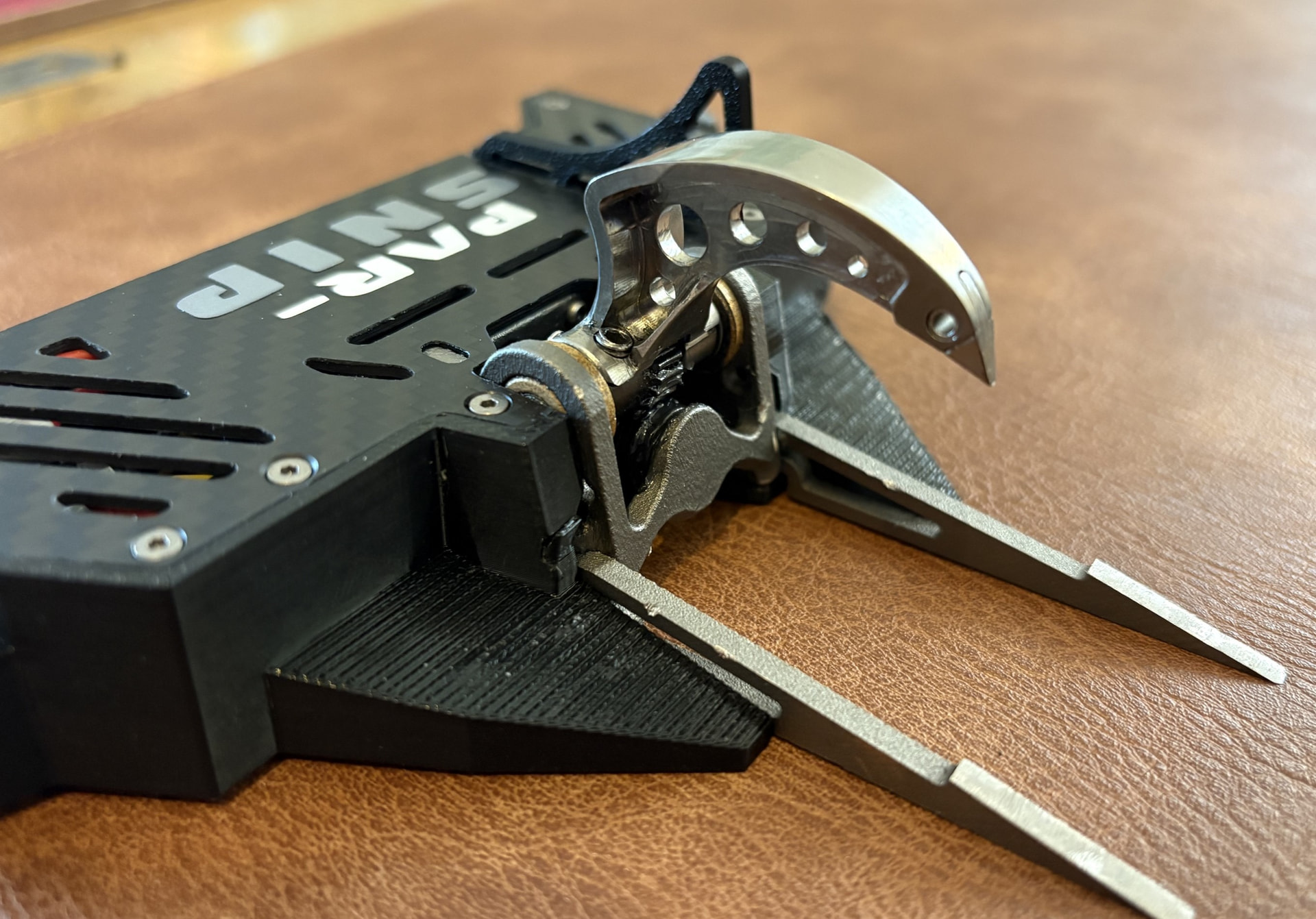
The final gearbox of PAR-SNIP runs a 0.5 mod worm drive onto a 20t contoured pinion. This gets that sweet 20:1 gear ratio, so a max theoretical output torque at the jaw pivot of around 1000kg.cm. This however is of course subject to physics… who apparently must take its pound of flesh… leaving a more realistic end torque of 500kg.cm. Still, that’s roughly double the pinion setup and it locks up like a dog’s jaw onto your favourite slipper.
These numbers all sound great… but only matter if the gearbox, jaw and chassis survive long enough to use them… Even if the force doesn’t make it to the tip of the jaw… it must go somewhere…