So now that all the history is out of the way, we can get to present day robot-ing
Way back when in the mess of work Antweights, I was trying to get a gear drive system to work for a flipper design, as with a dusty polycarbonate arena floor traction was pretty dire. Some sacrificed pololu wheels and we had this, which was immediately shelved as I wanted a spinner instead
Which led to Transvector, a my attempt then at making the thinnest bot I could, an undercutter TPU outer walls and CF lids. It kinda started to look like a frog so I ran with it, giving it a tongue shaped blade.
I Don’t have any photos sadly of it assembled, it lived it’s short life with a plastic spinner and has been stuffed in the bottom of my dead robot bin pretty much ever since. It did have a 2204 weapon motor if I recall, just to make it into the wheel height.
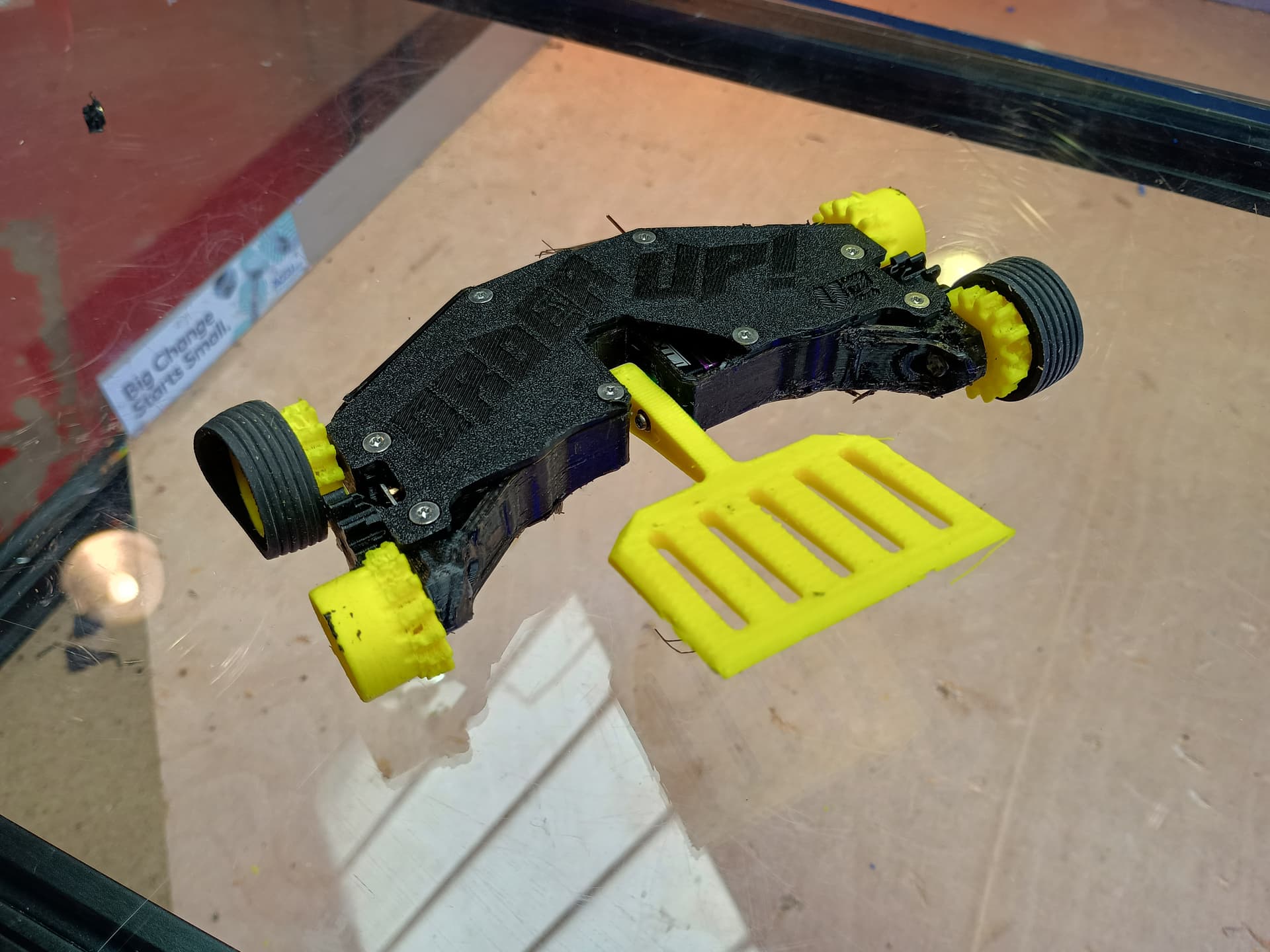
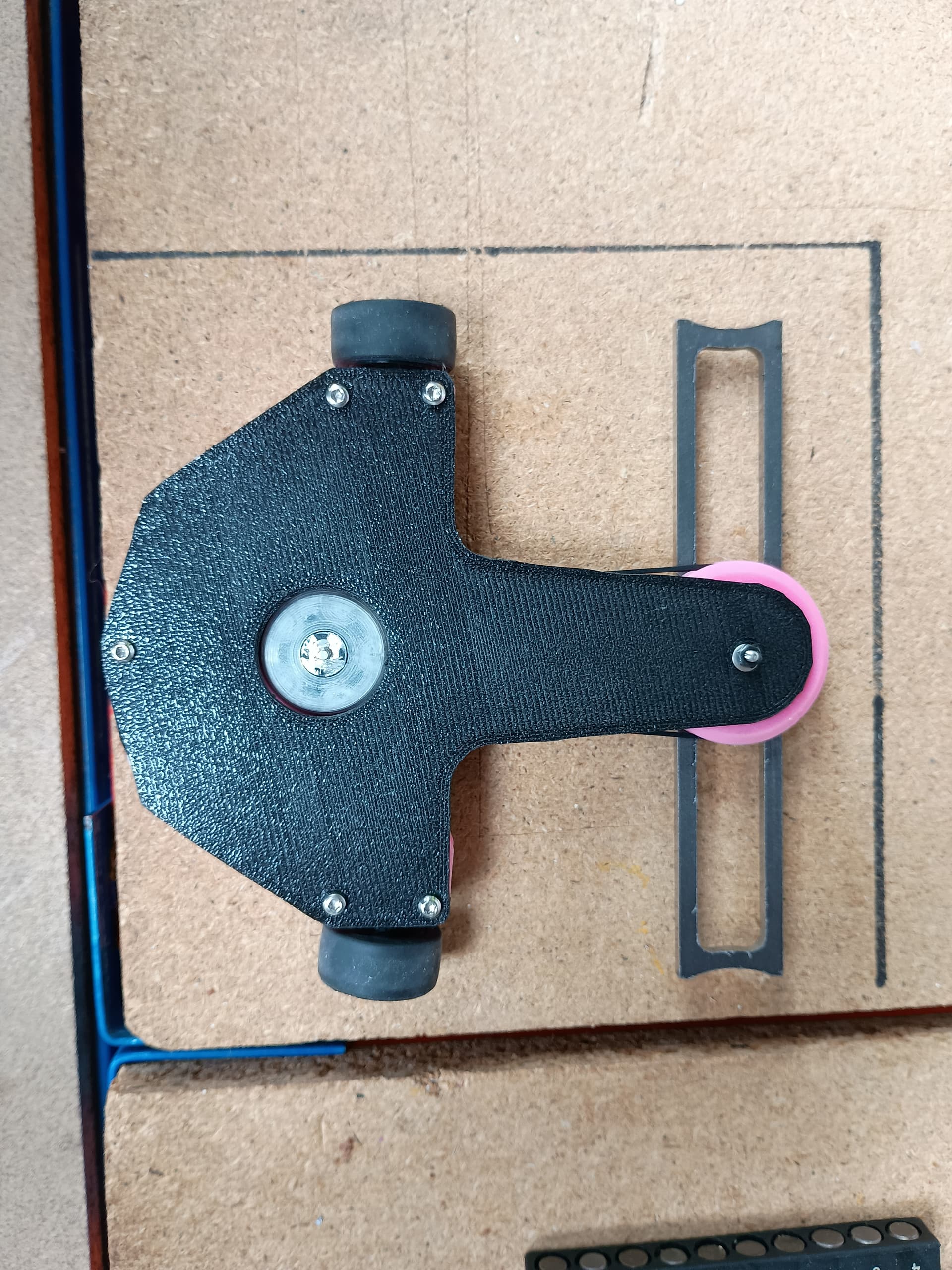
So about 9 months ago, I was inspired to make gear-drive a thing again, and to use my new fancy paper-takeup roller wheels to do it. They’re about 20mm in diameter, and offer unbelievable grip but are incredibly heavy compared to a normal wheel.
Took a while to set on a design as I couldn’t get a vert or overhead to work nicely, but then
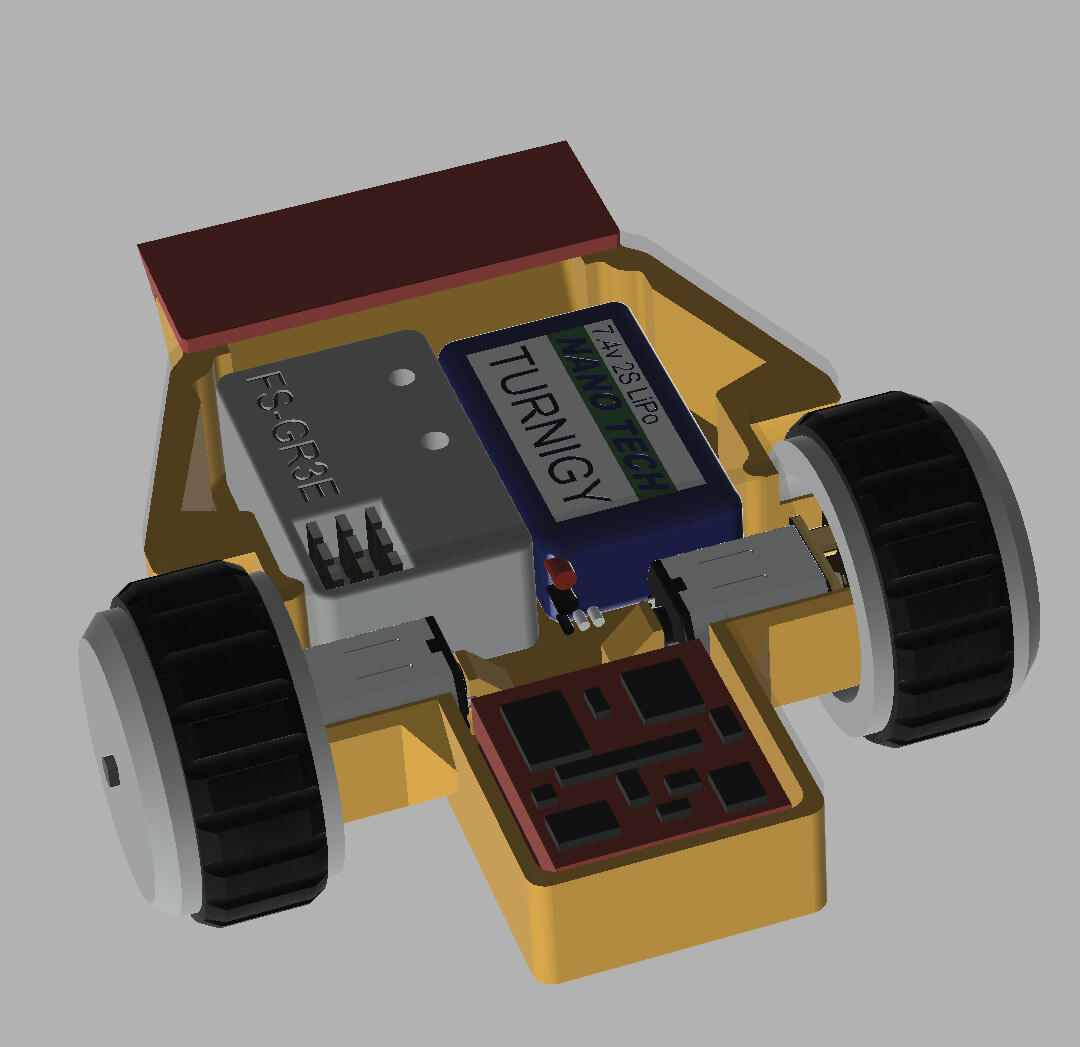
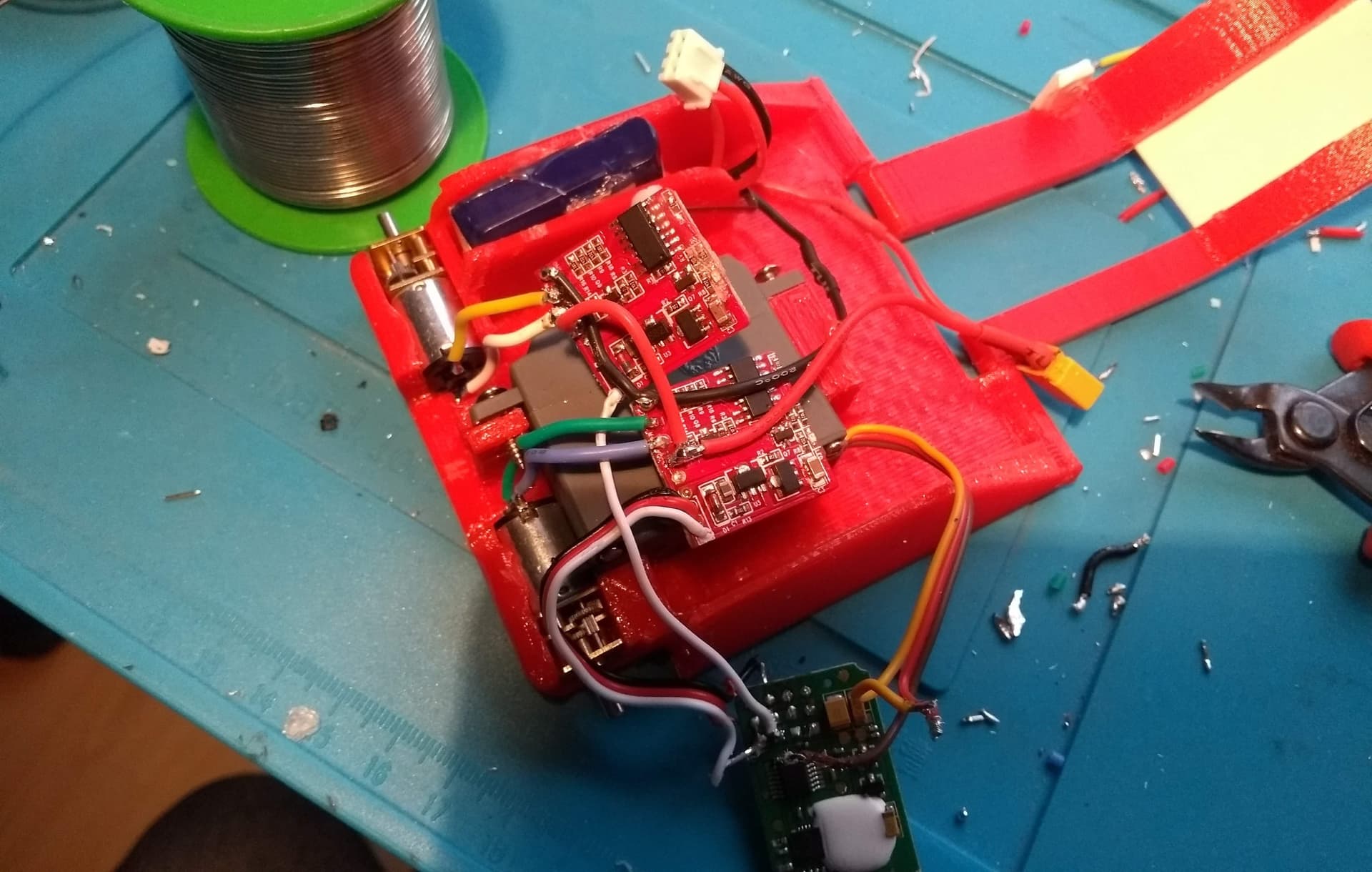
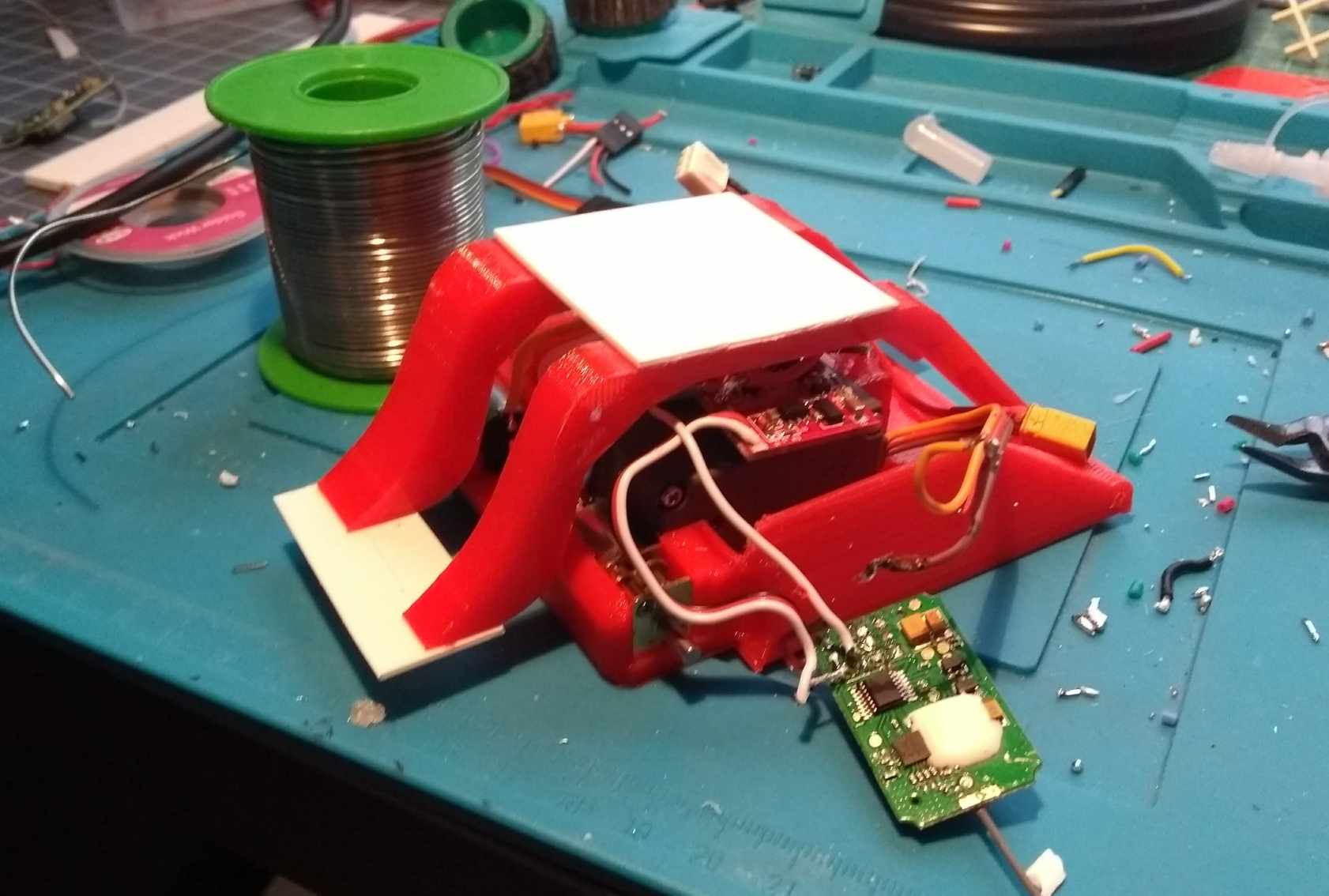
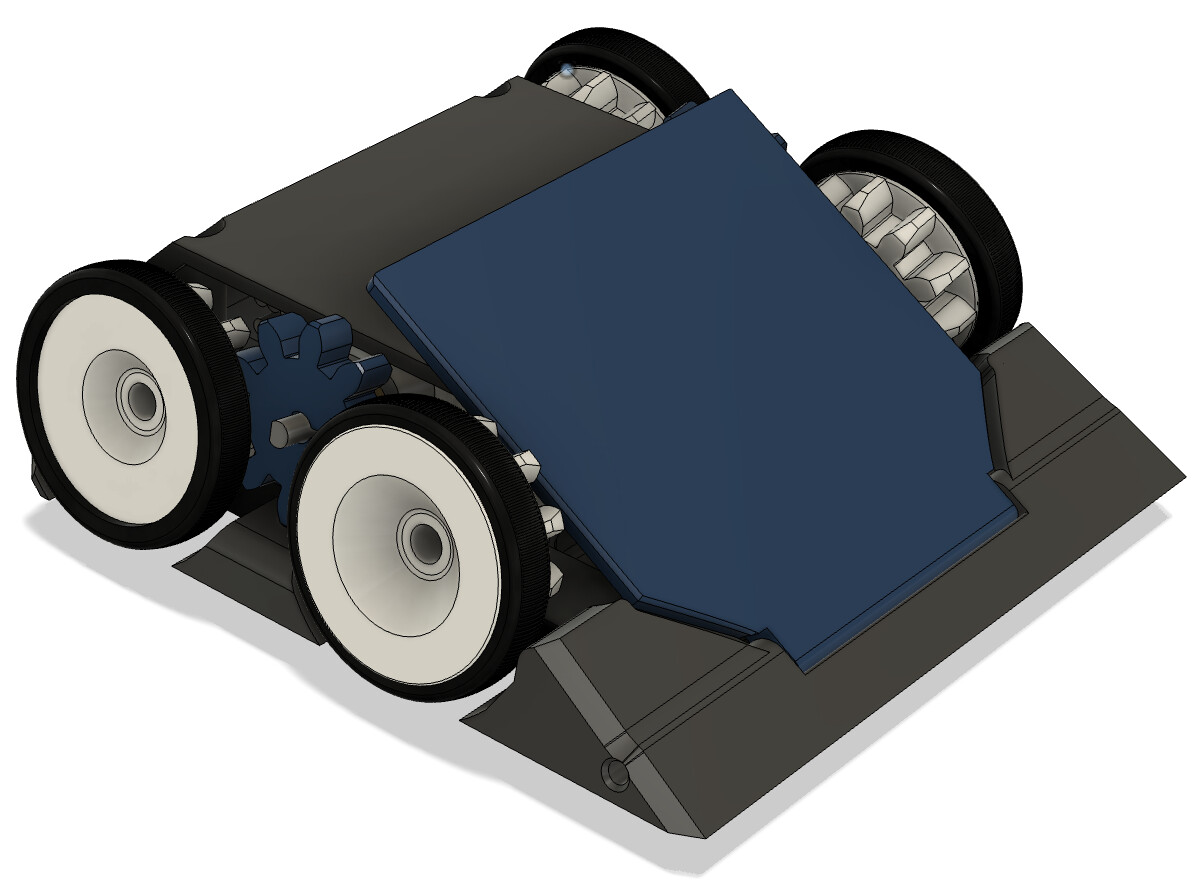
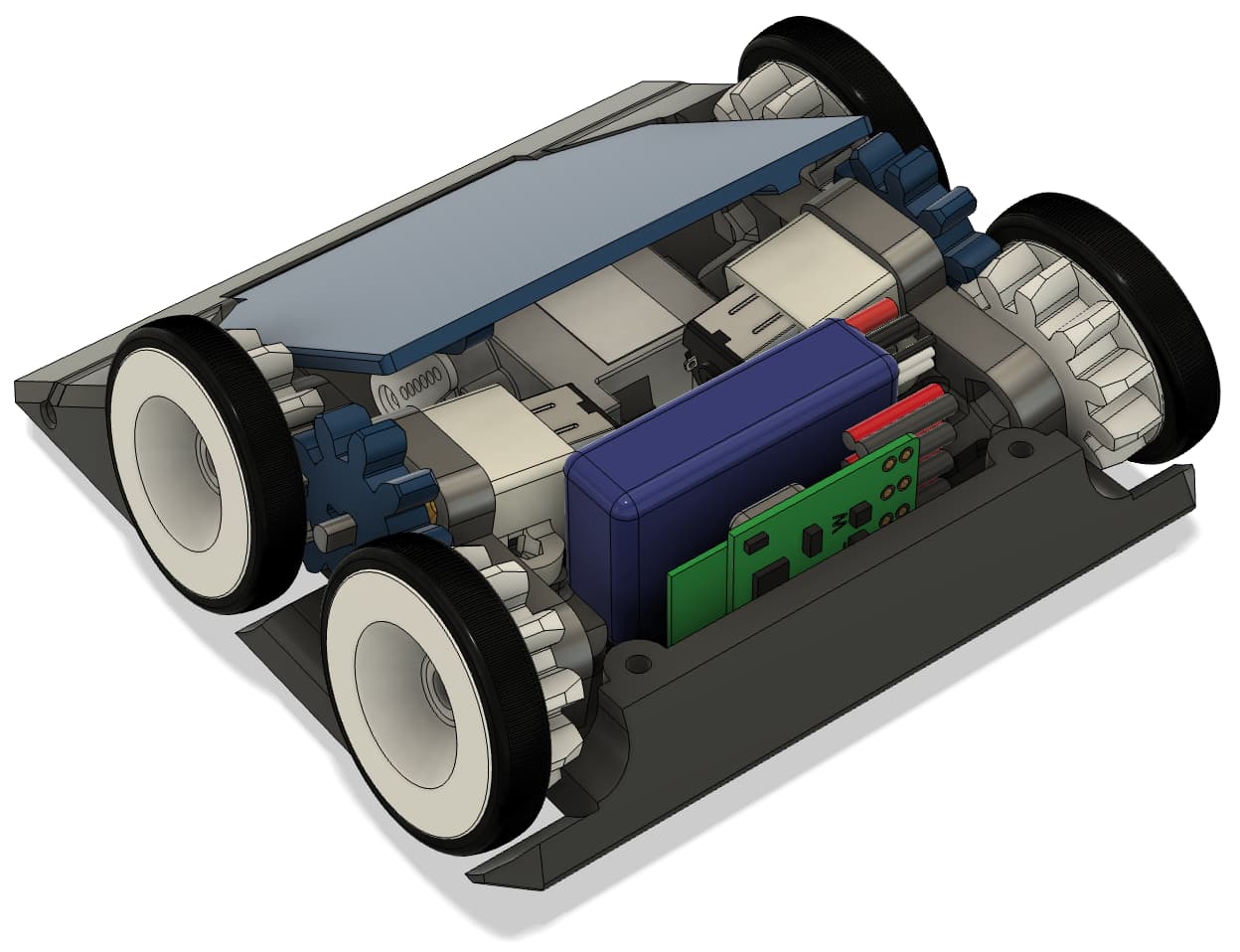
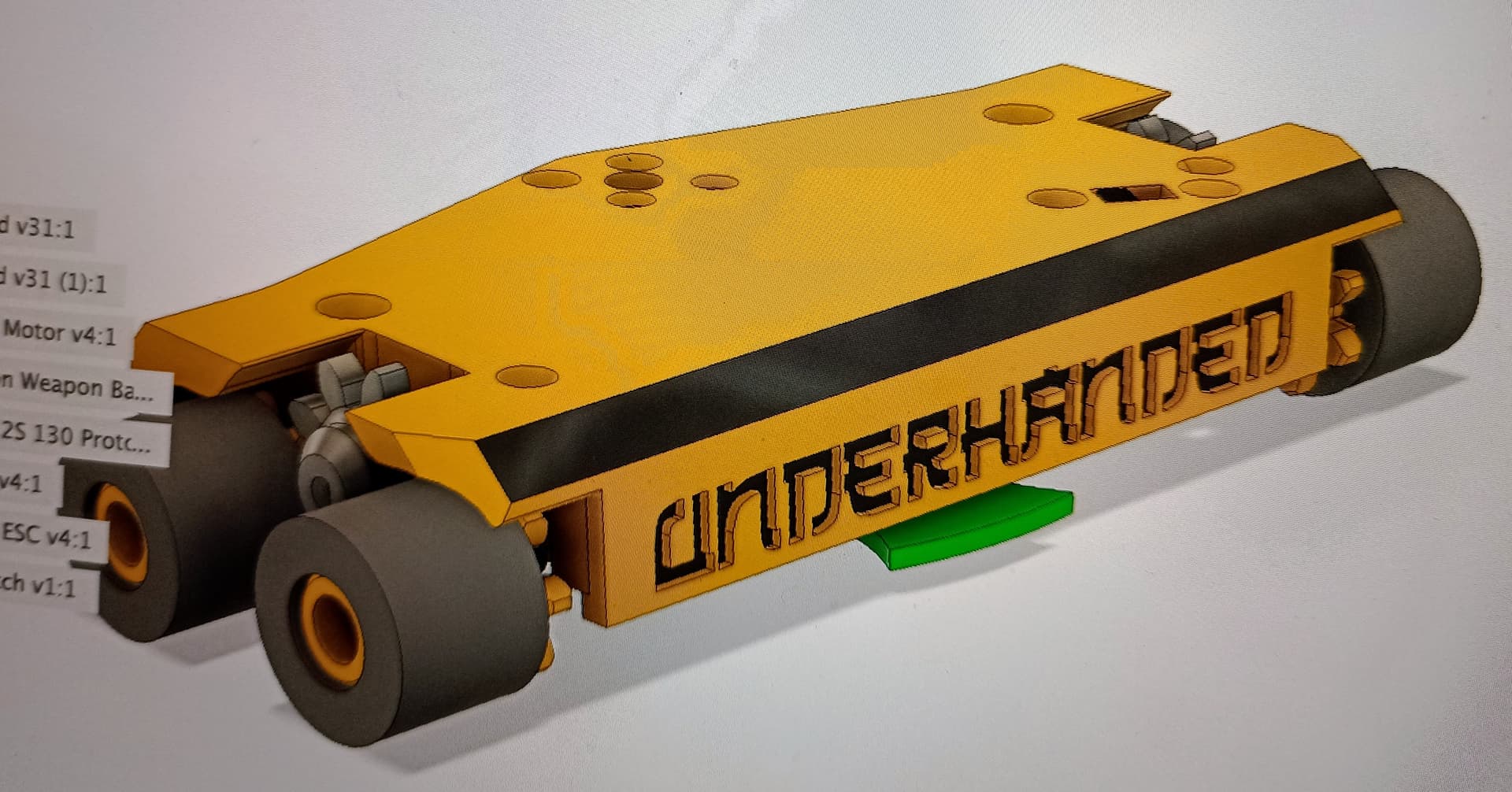
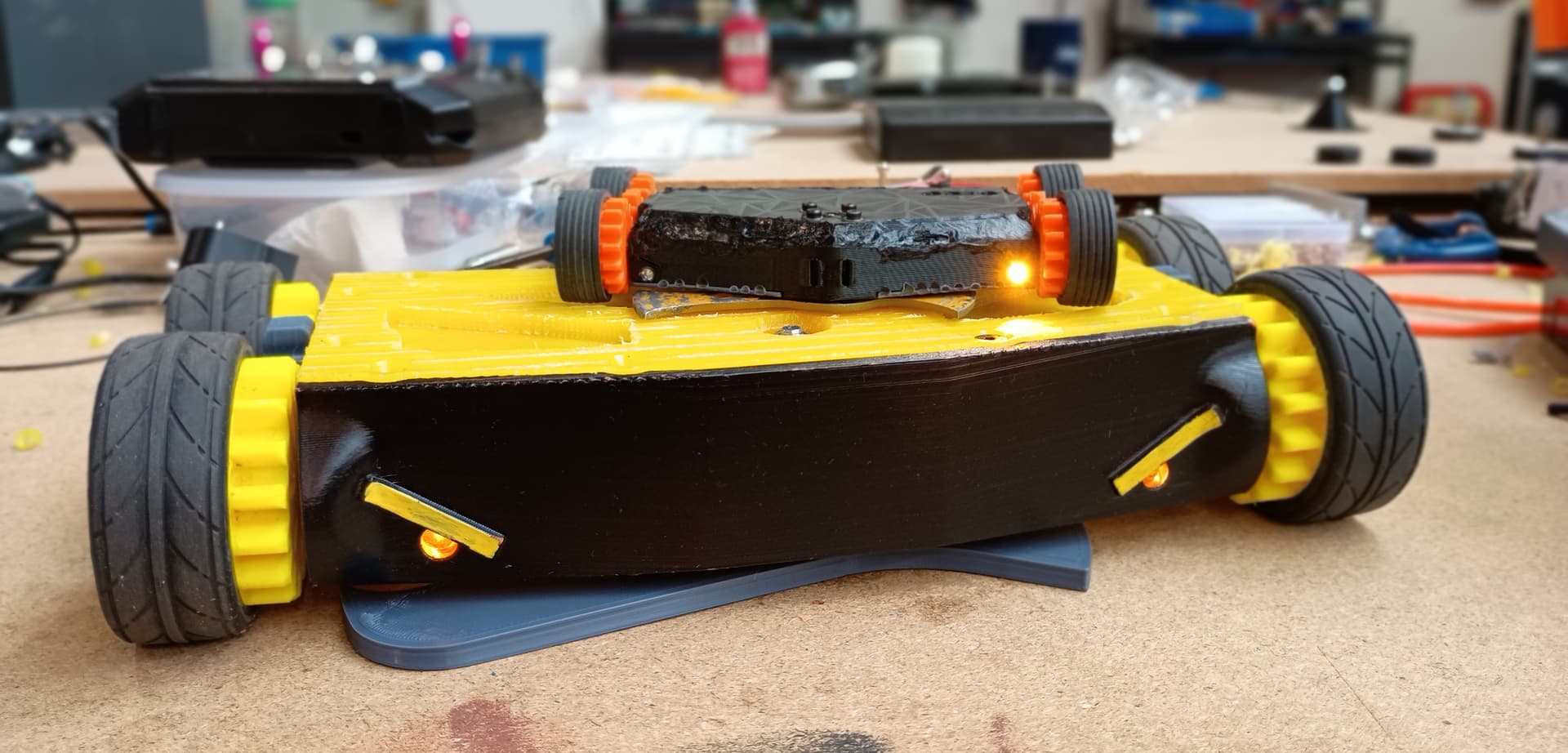
Underhanded Tactics, my 2nd favorite robot I’ve made yet.
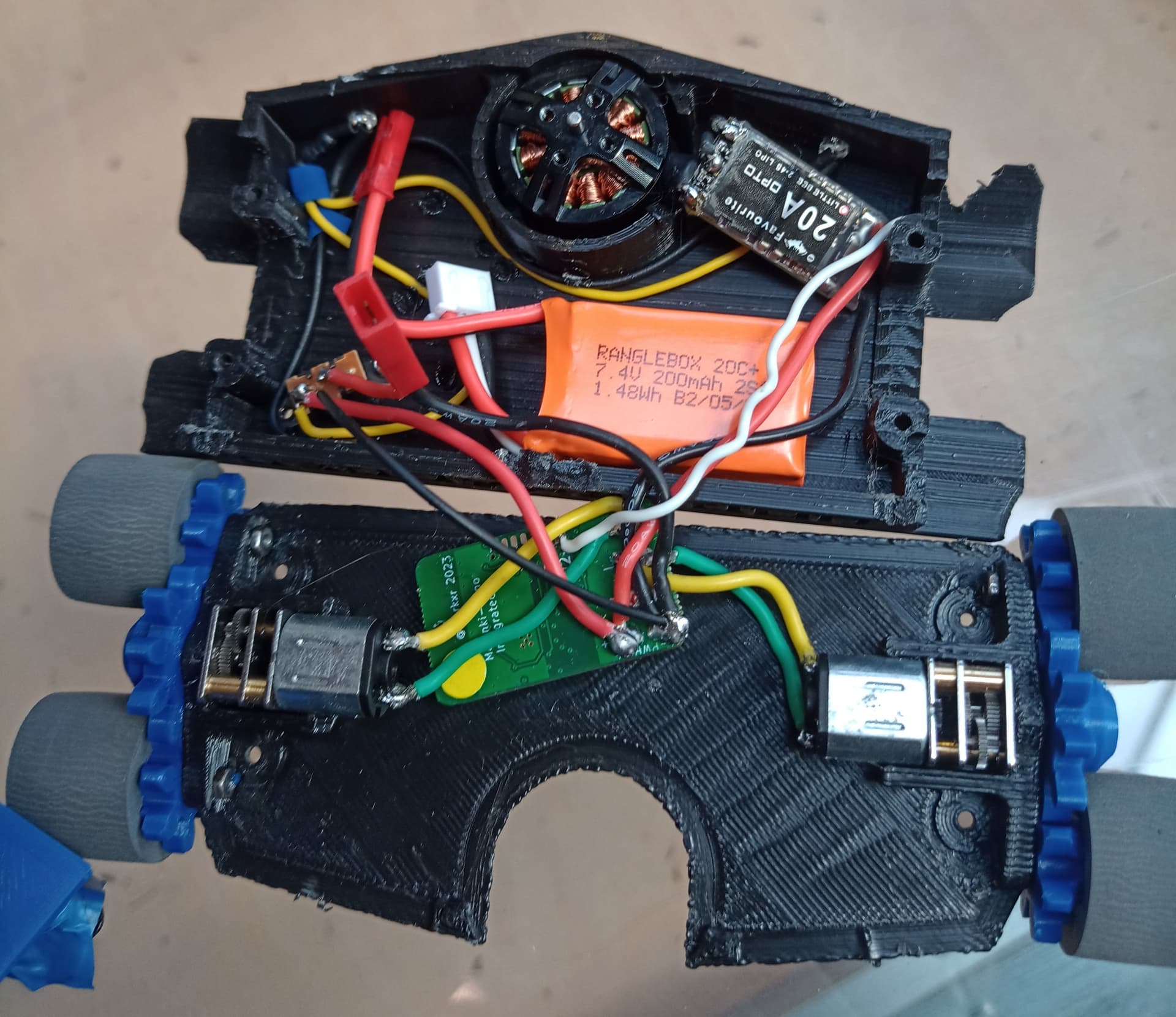
Pretty messy spaghetti wiring but it worked, and was fiercely non-invertible, but it worked, and worked well enough that it warranted a further development.
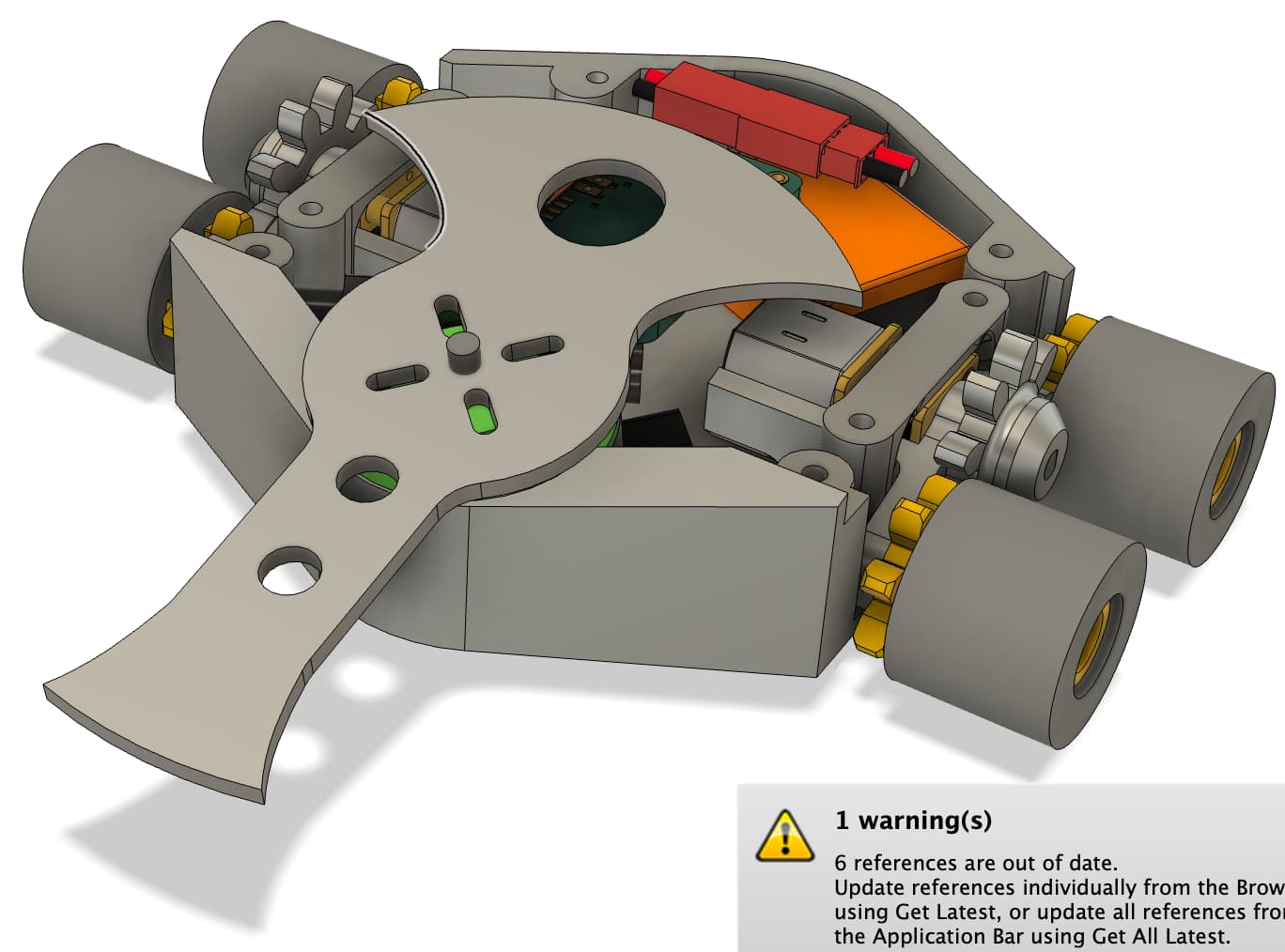
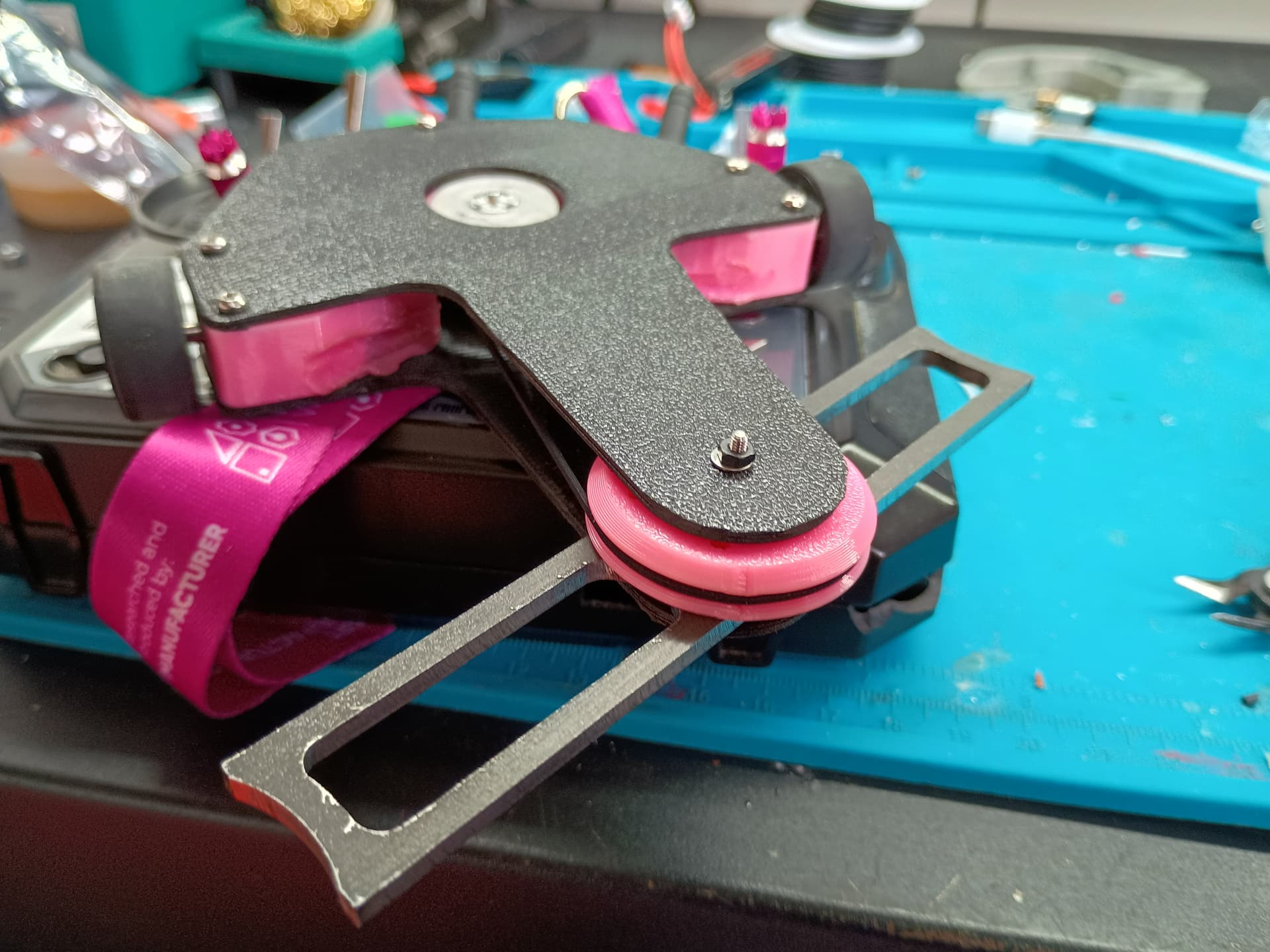
There’s been a few revisions, but I’d say we’re still at V1.3 rather than a true V2. Initial changes were to lose the wheel hoods as they were a faff to print, and didn’t add to anything other than adding biting points. Also fairly important to fix was the fact it didn’t drive inverted, initially I tried shifting the wheel position, but got stuck trying to work around the 20mm wheel diameter.
The biggest quality of life change was to fix my usual issue of lids containing components, as the drive motors were stuck in the lid, and the weapon motor in the top it made disassembling this a complete pain.
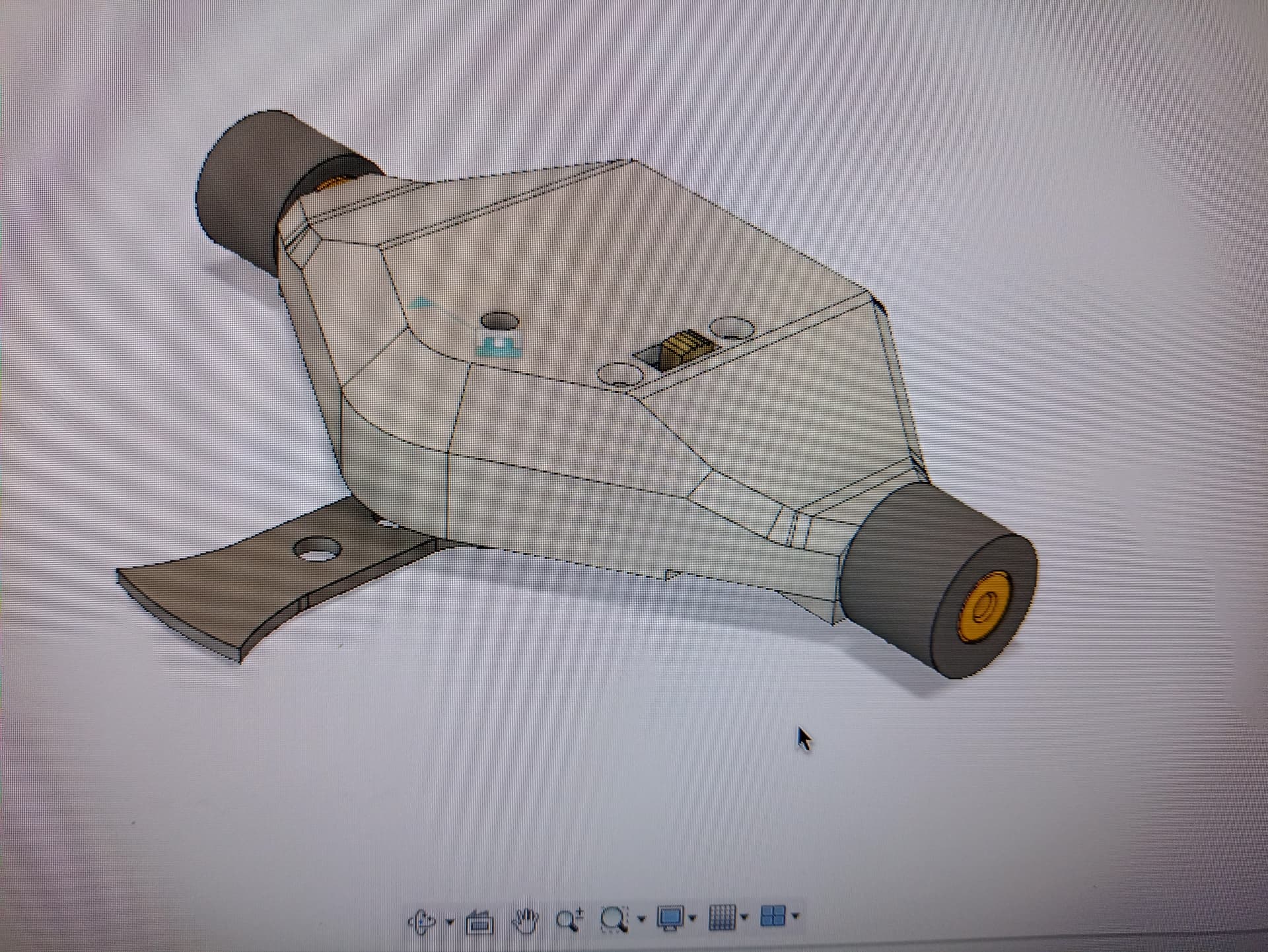
I ended up redrawing this a few times from scratch, and I feel like it lost a lot of it’s character every time I modified something, as I wanted to keep it low, slick and pretty close to the original silhouette.
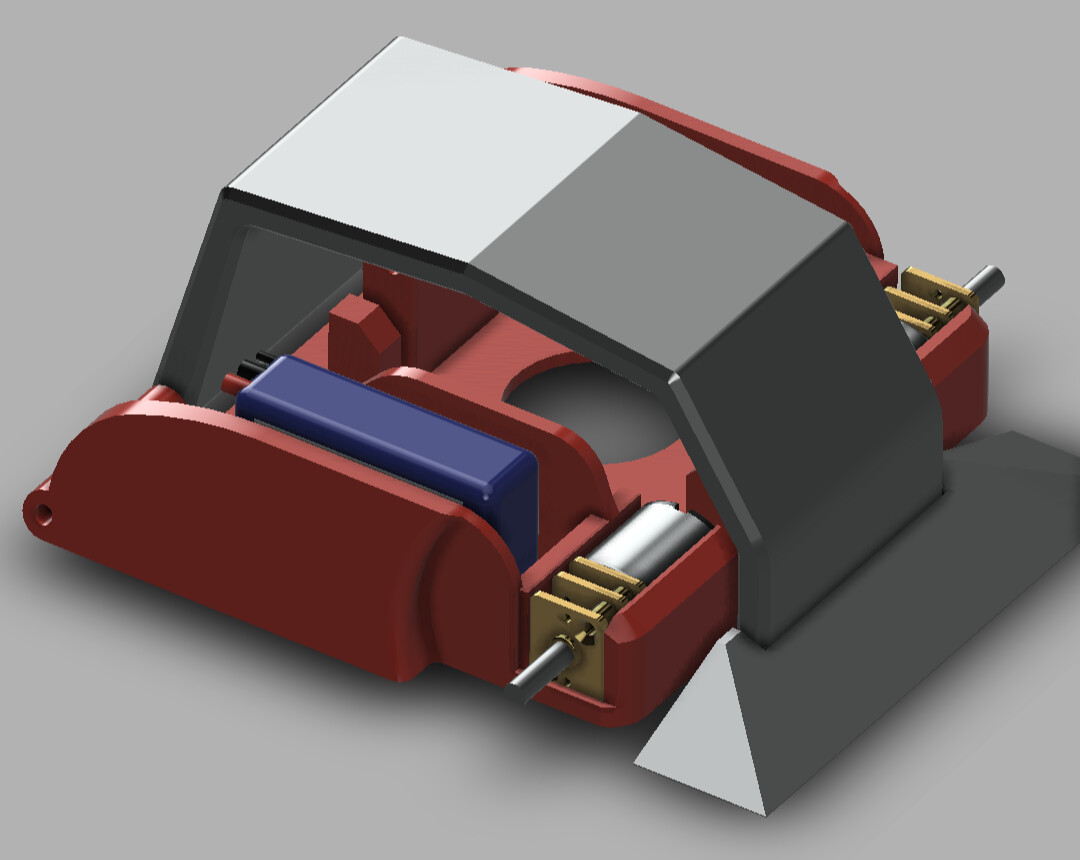
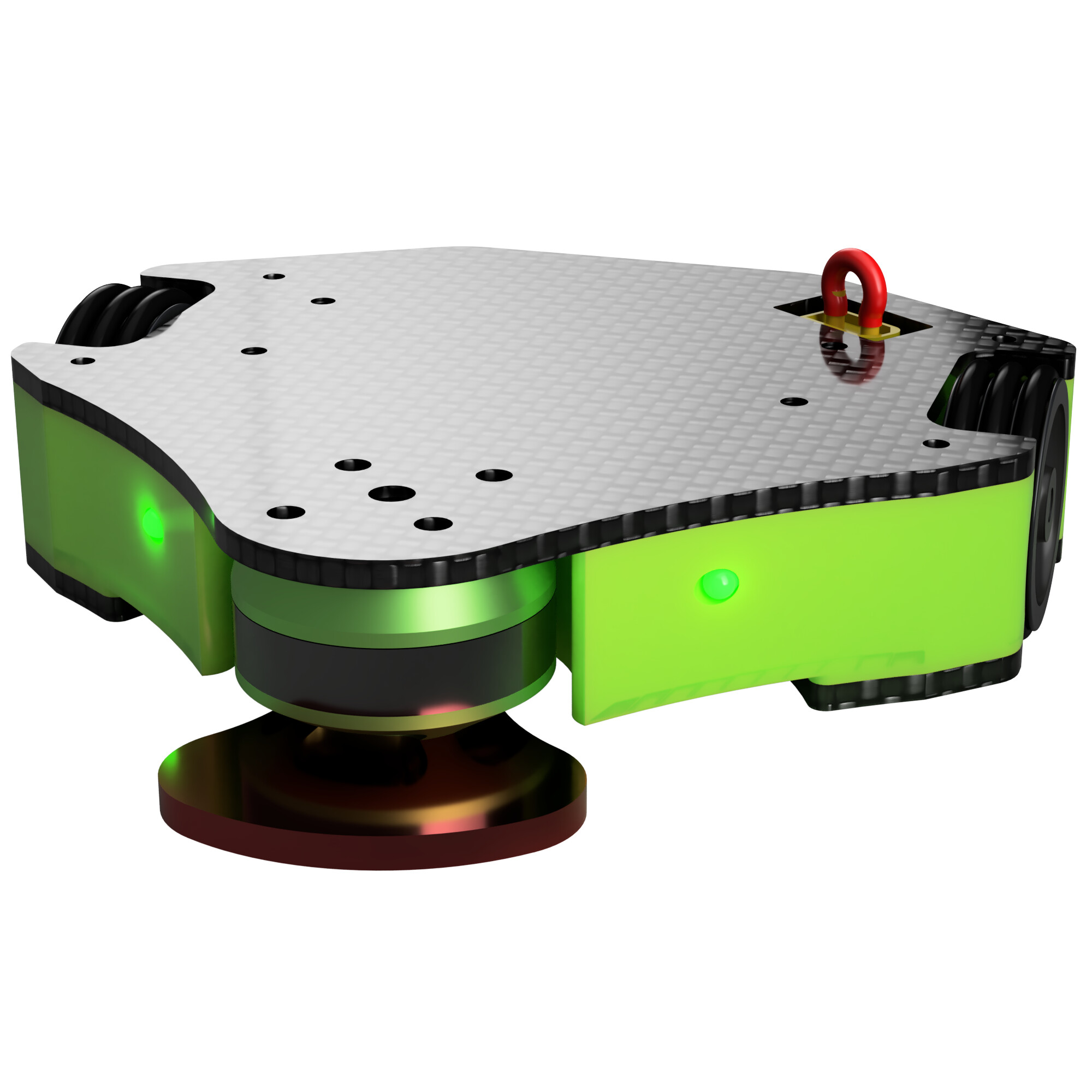
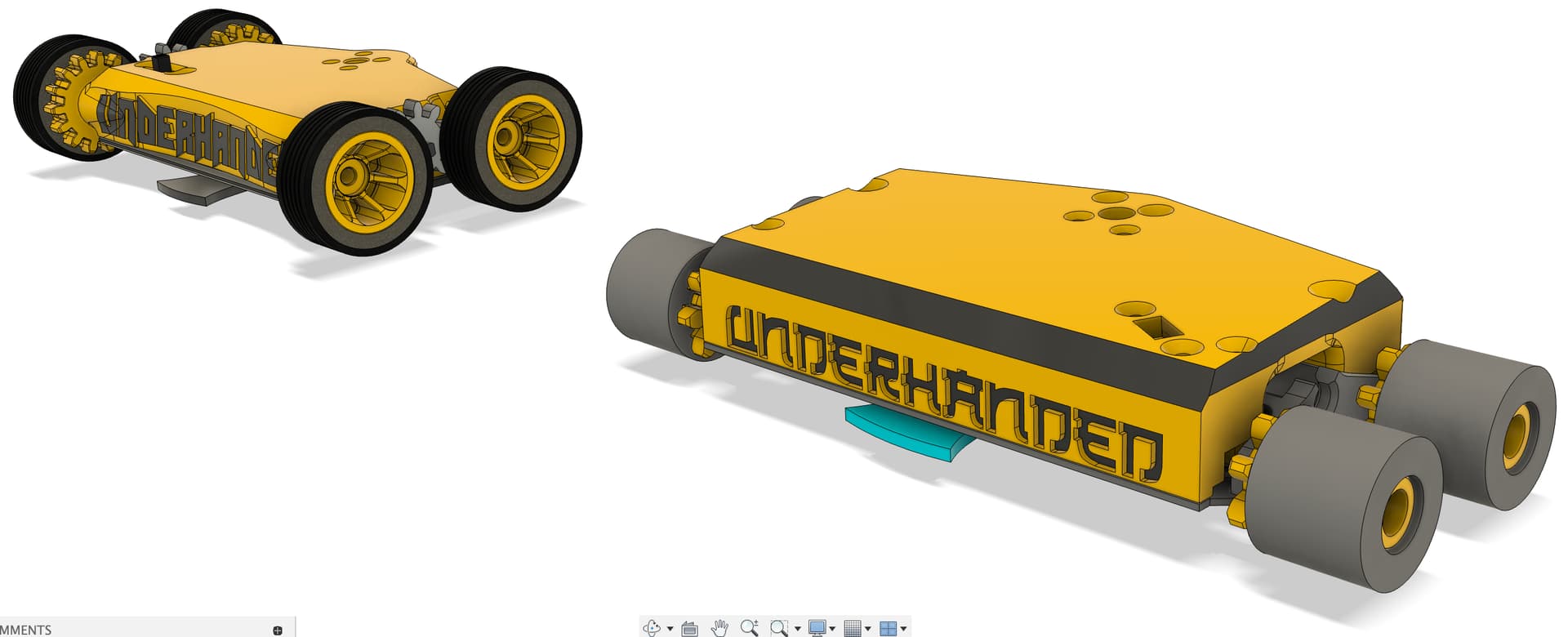
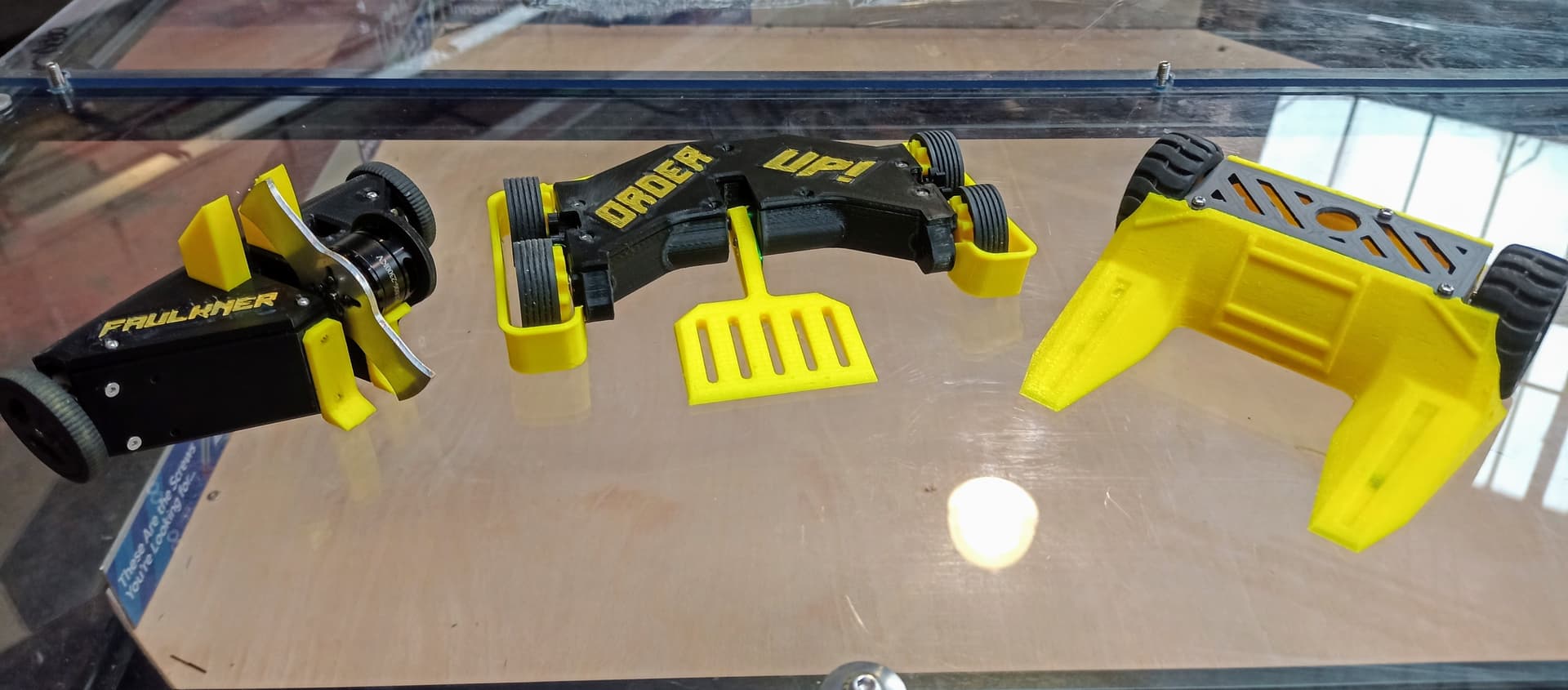
V1.2 vs V1.4
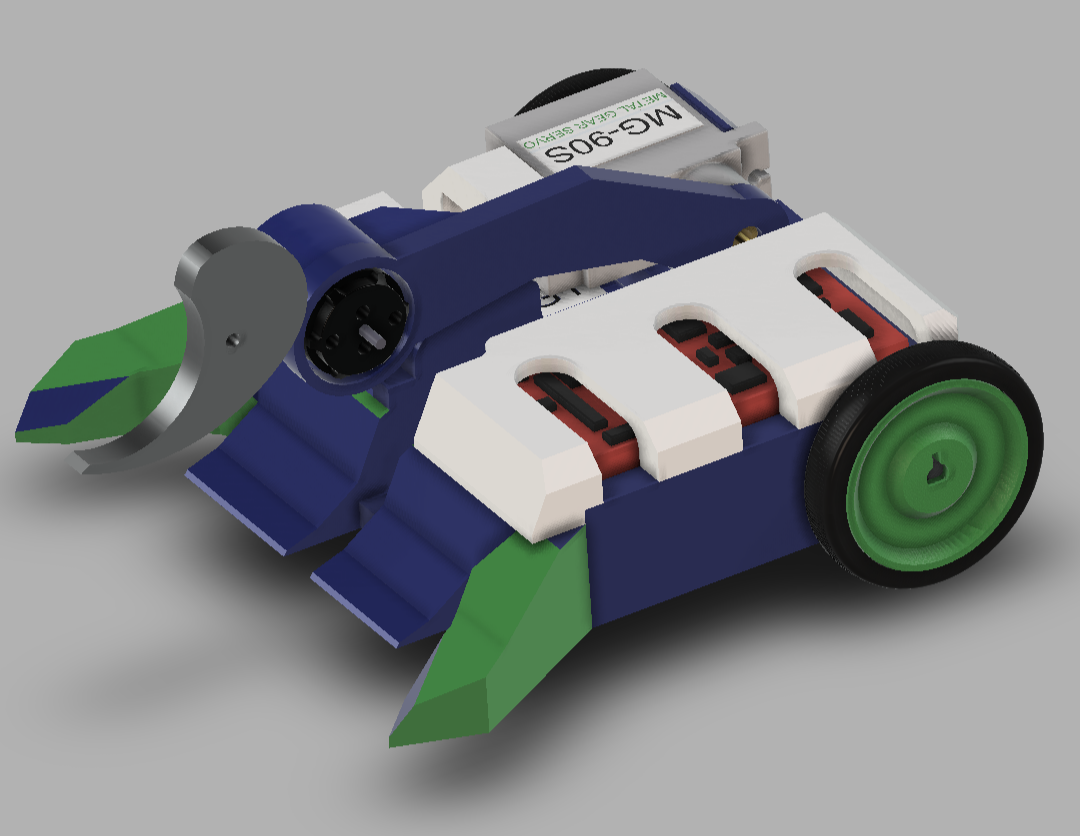
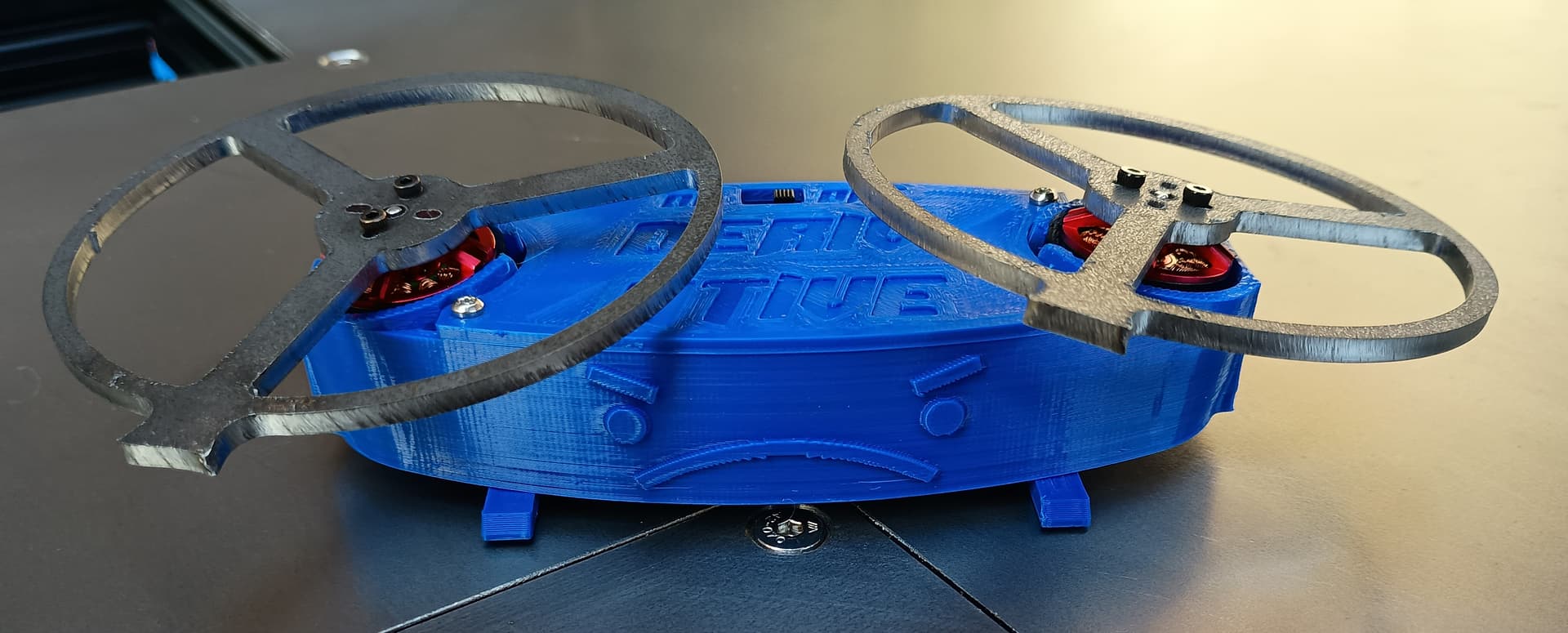
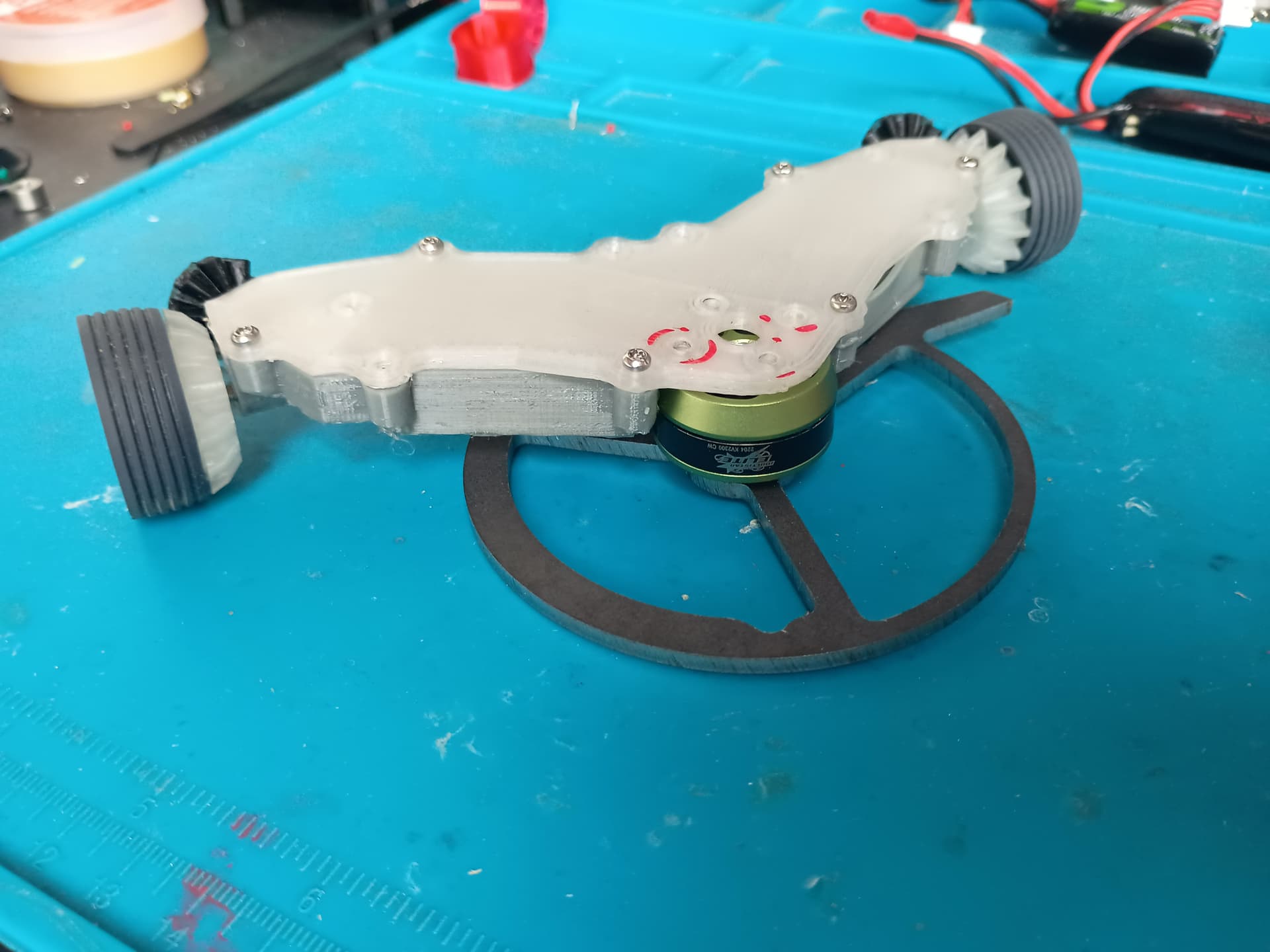
The fix was eventually to just get over it and move to a bigger wheel. This timed nicely with Ellis launching his 30mm wheels, and after a few tweaks it was driving around the arena better than ever before.
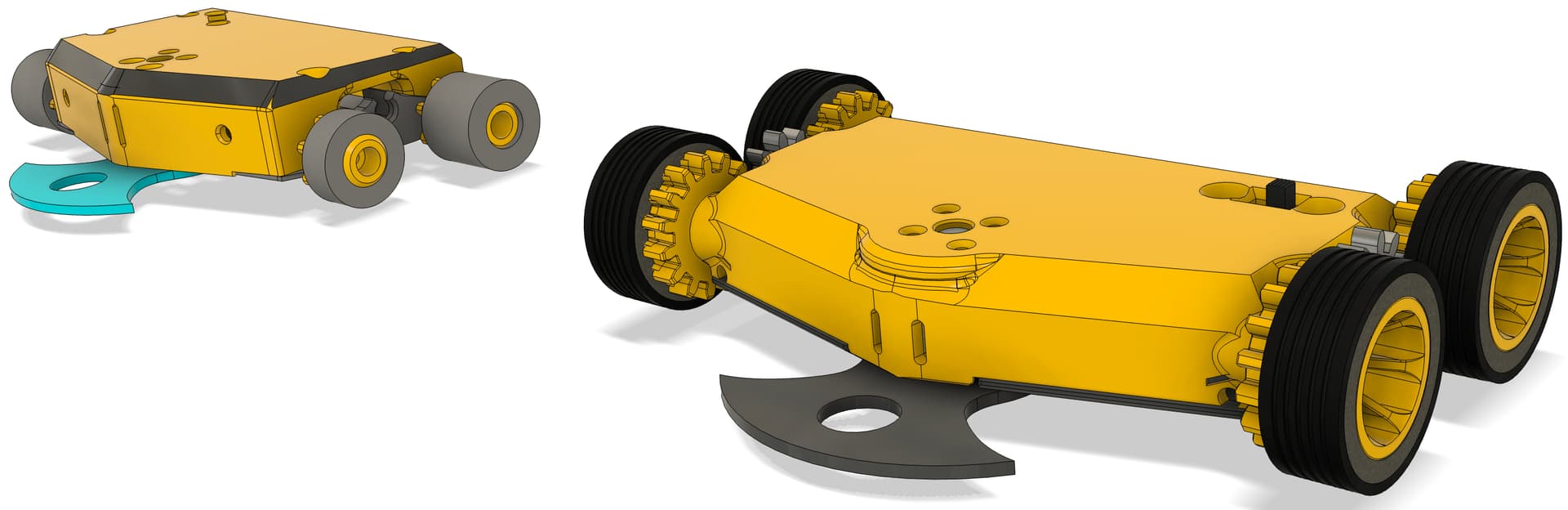
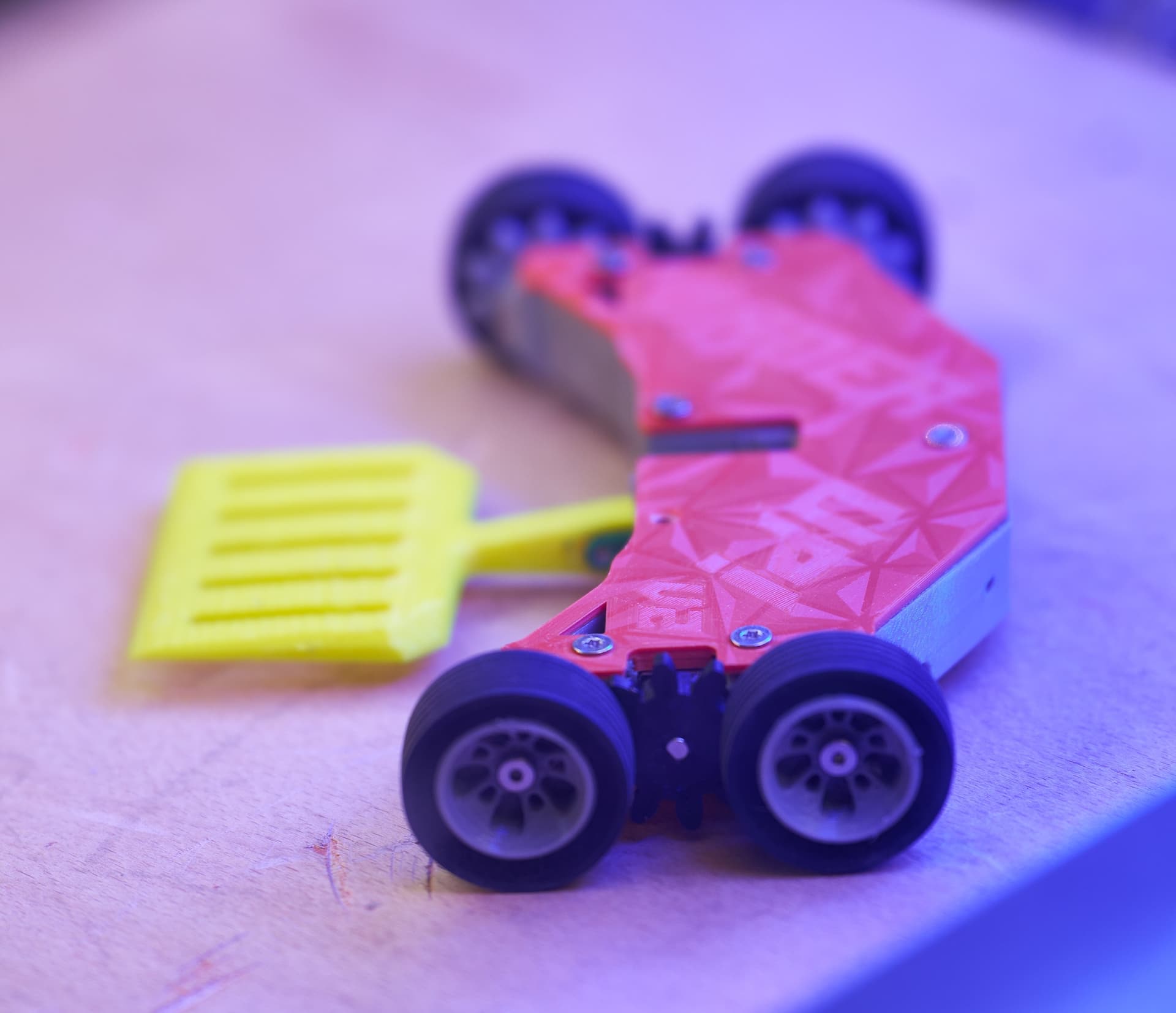
There was actually an in-between version which has been lost to the fusion cloud somewhere, and the V1.4 is based on the changes made to the beetle version, moving the wheels to get better ground clearance, and curving the rear to expose even more of the blade behind the robot. More screws as well, to reduce the tin-opener effect It has on itself when it gets a big vertical hit to its blade, or at least to keep more of the lid on when it does.
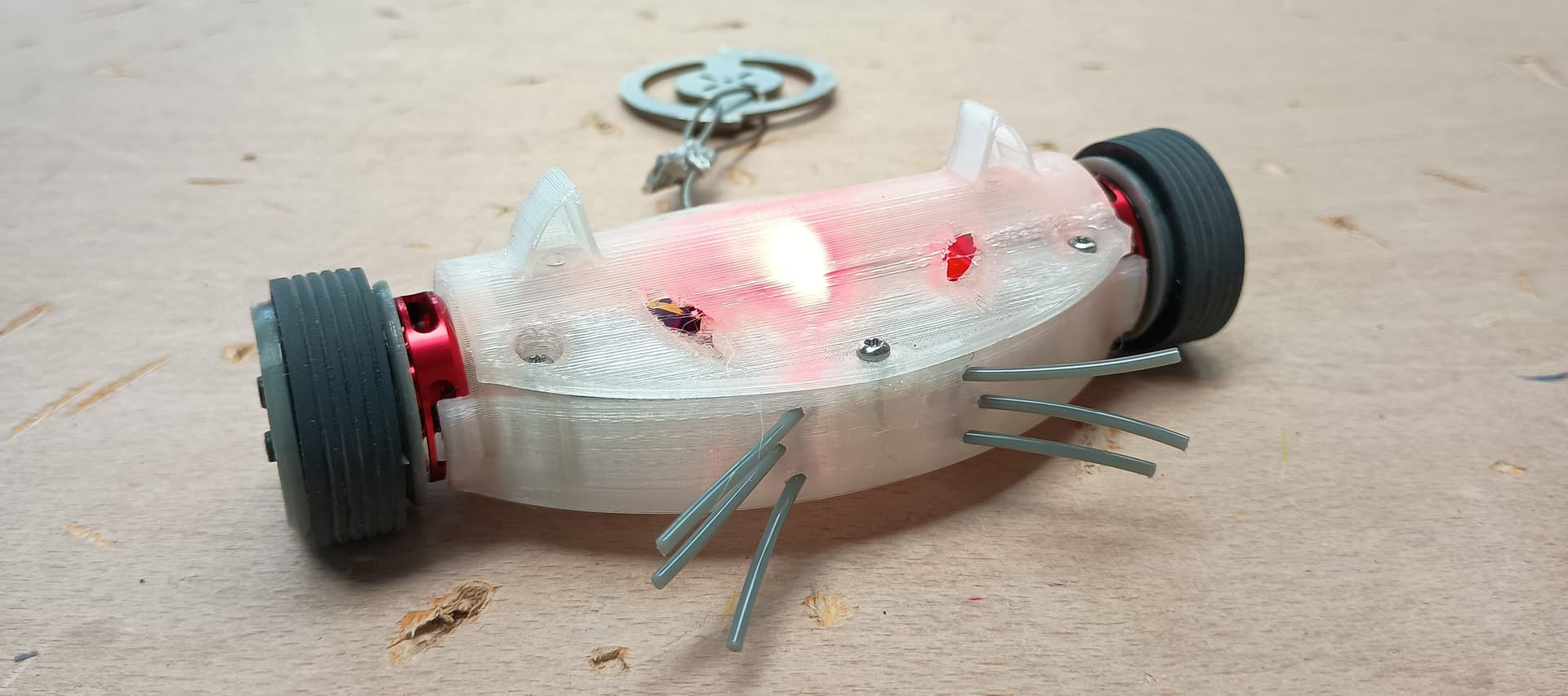
The big change from 1.2 to 1.4 is moving from heat inserts and shoulder screws for the wheel axles to an M3 plastic screw and nylock. This saves a pretty decent amount of weight, and solves the problem I had with damaged wheels binding my drivetrain. Small hits are shrugged off by the foam tyres and TPU hub, and anything huge breaks the screw and rips it clean off, leaving me unencumbered. I’m currently trailing polycarbonate screws and RENY screws, and they’ve done fairly well so far. In the worst case, due to the gear location on V1.4 it can dive with no wheels left as the gears can touch the floor either way up.
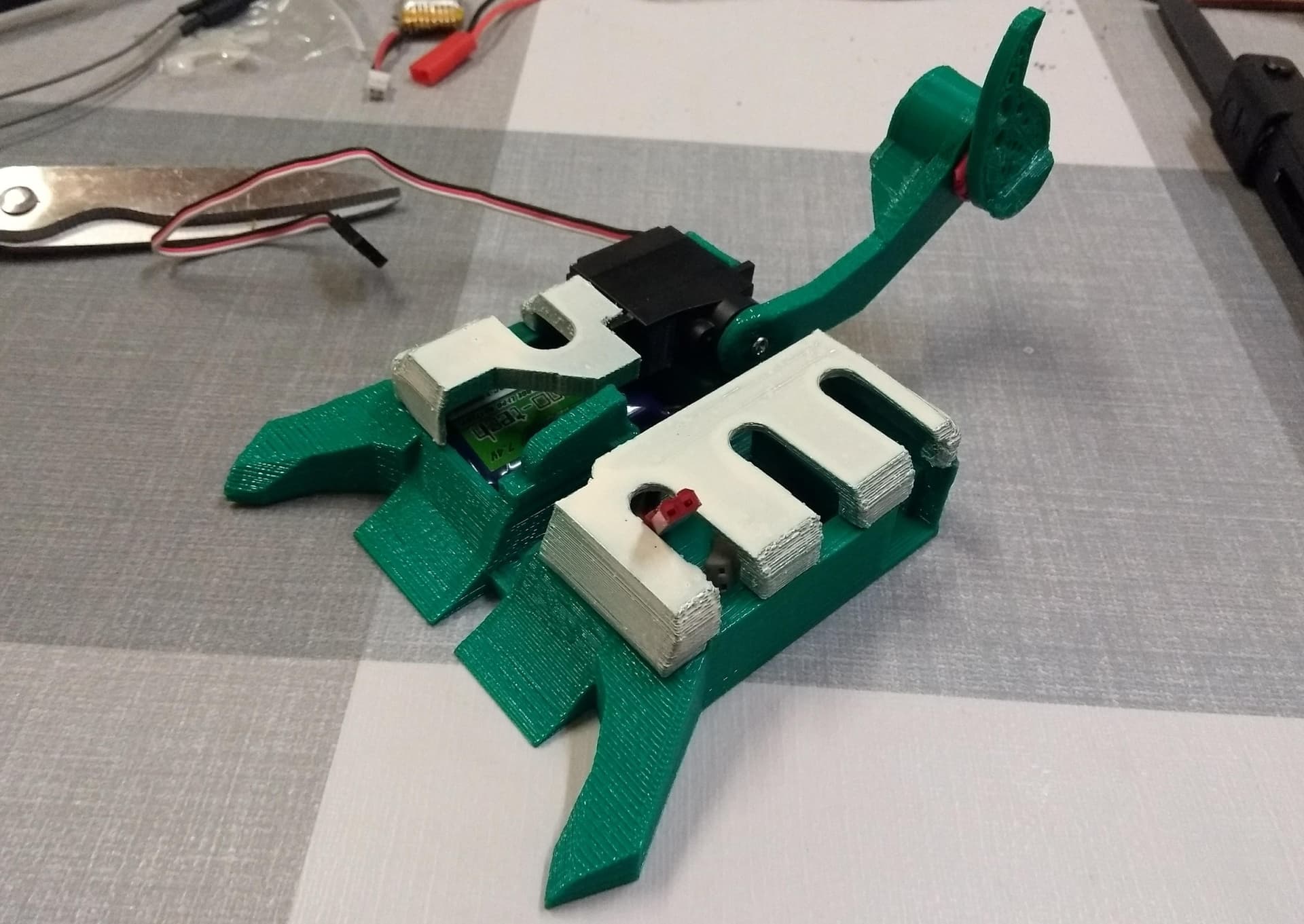
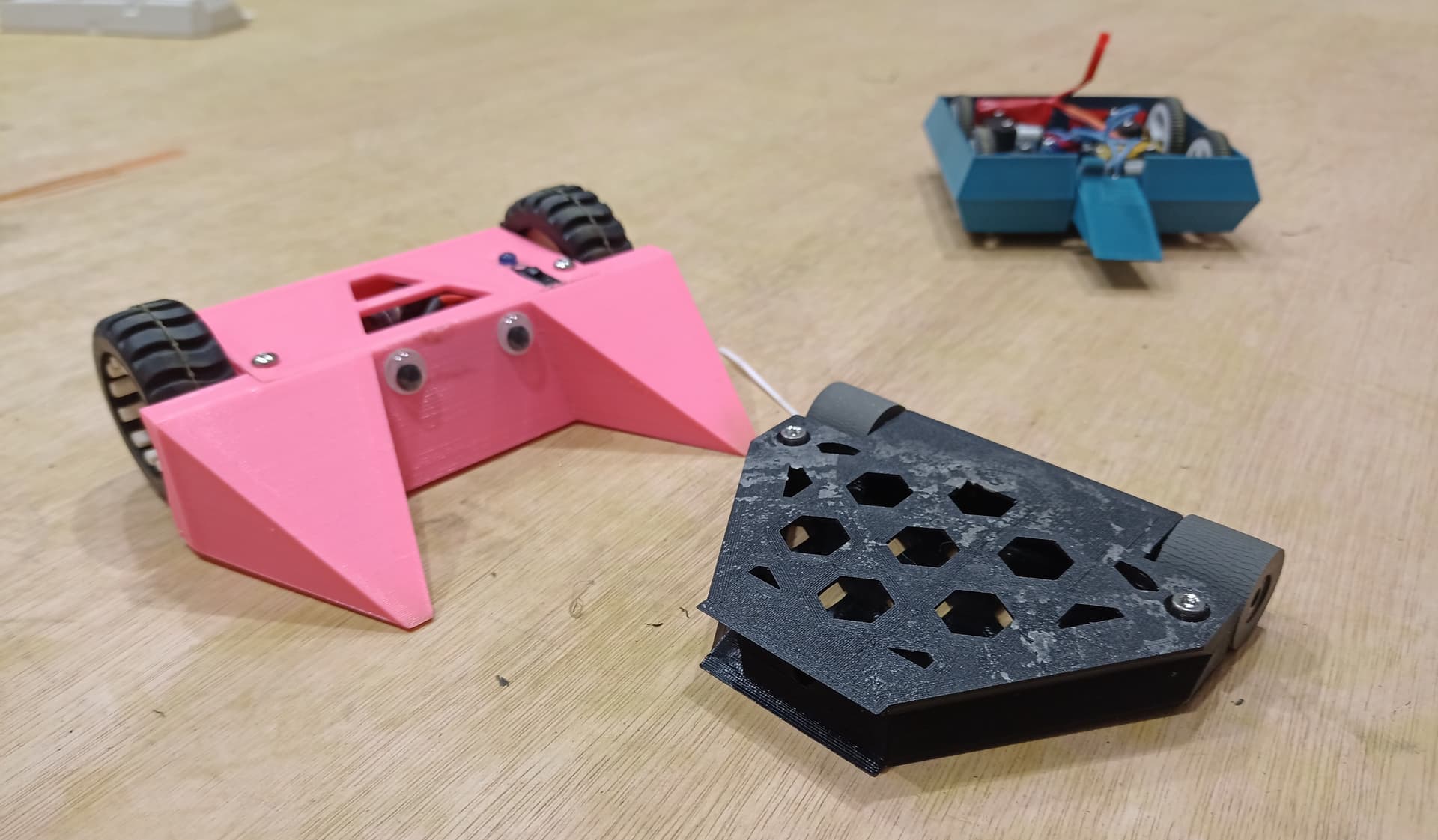
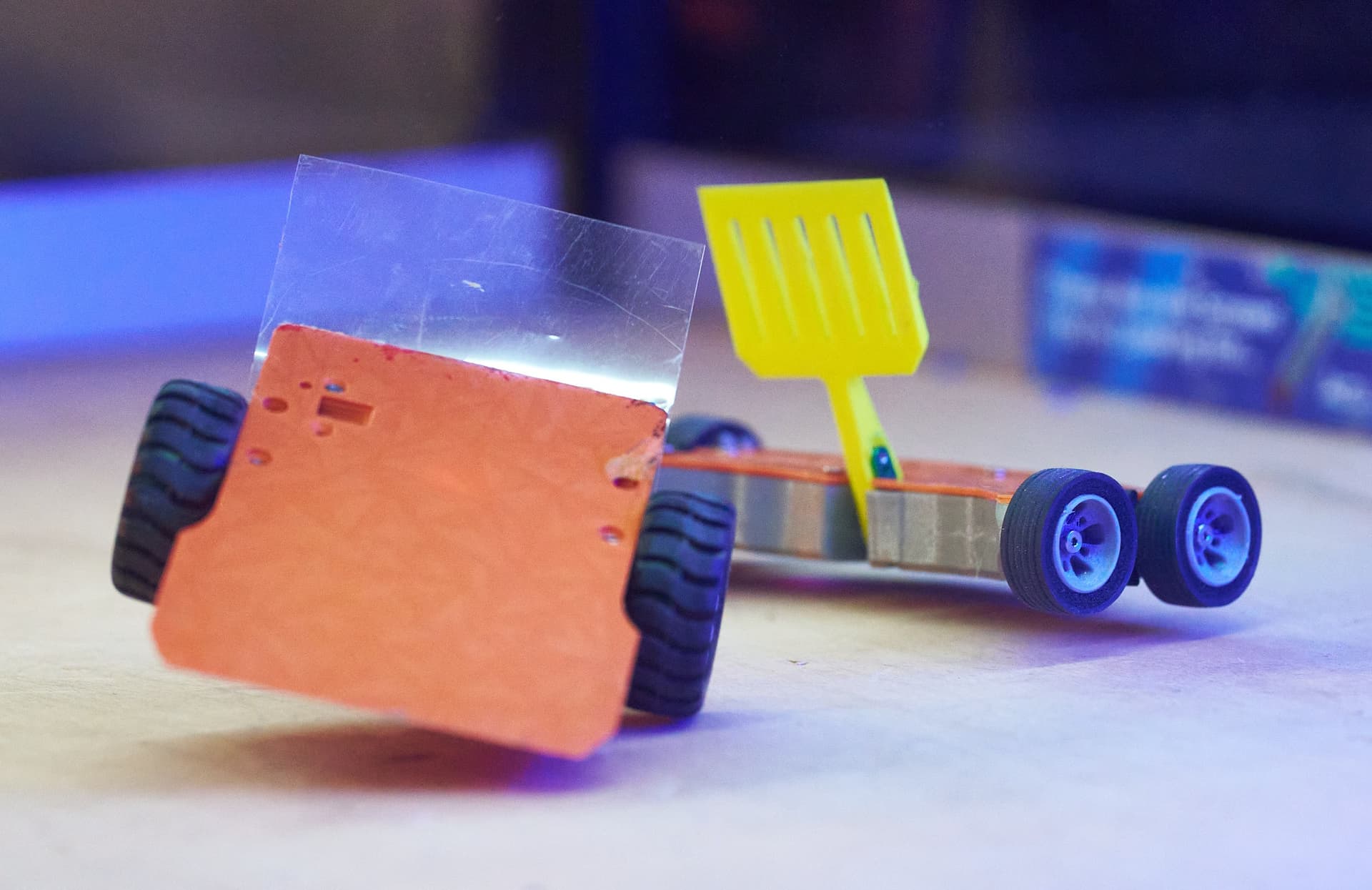
Obligatory “don’t talk to me or my son ever again” with V1.3
The reason this I still class this as V1.4 and not V2 is despite the many body changes, the original wiring is still in use, with no replacements, and it’s pretty tired at around 30 fights. From the get go, I’ve been planning to move to a 3mm blade, and the more I run this robot, the more I’m sadly coming round to adding rear forks or a wedge configuration for that “just in case”. Plenty of grip and torque from the N10’s and wheels, but against a wedge I have no pushing surfaces to use.
I also need to reprogram the ESC, it’s still running a stock firmware OPTO, which is a little weedy and really hurts my spin up time, as well as a 1700KV 1806 which is limiting my top speed. I have the parts, but I’ve been waiting for it to finally die before I do a true rebuild. It sits at around 138g, so there’s plenty of room for a thicker blade and other bits.
This took a lot longer than expected but I hope it was at least interesting. Between my verts and pusher I’ve been going through N10’s faster than ever, and since switching to gear drive I’ve not had a failure.