I built my first bot at university back in September 2016 as part of the uni’s Maker Society. Being a poor university student at the time, my first generation of bots did use cheap parts like hacked servos for drive and the cheapest transmitters and receivers HobbyKing sold. In the years since then I’ve moved over to using 30:1 Pololu HP micro metal gearmotors (except where noted) and FingerTech tinyESCs for the drive and ToughHub wheels, while still using T6A-V2 transmitters (while stocks were available) as they were cheap enough for me to have one per bot, to allow them to be pick-up-and-play, useful for uni Freshers Fairs.
After a few years of non-competitive fights in an open-air arena at Uni, Death Grip, Karabos and Impact were finally entered into their first proper competition at BotFest 4 in July 2021, where they managed to go a combined 10-5 with Death Grip finishing 4th and all three bots avoiding every single spinner at the event, so I have no idea how well my bots stand up to high KE weaponry.
The majority of parts are printed with Filamentum ASA Extrafill except where noted.
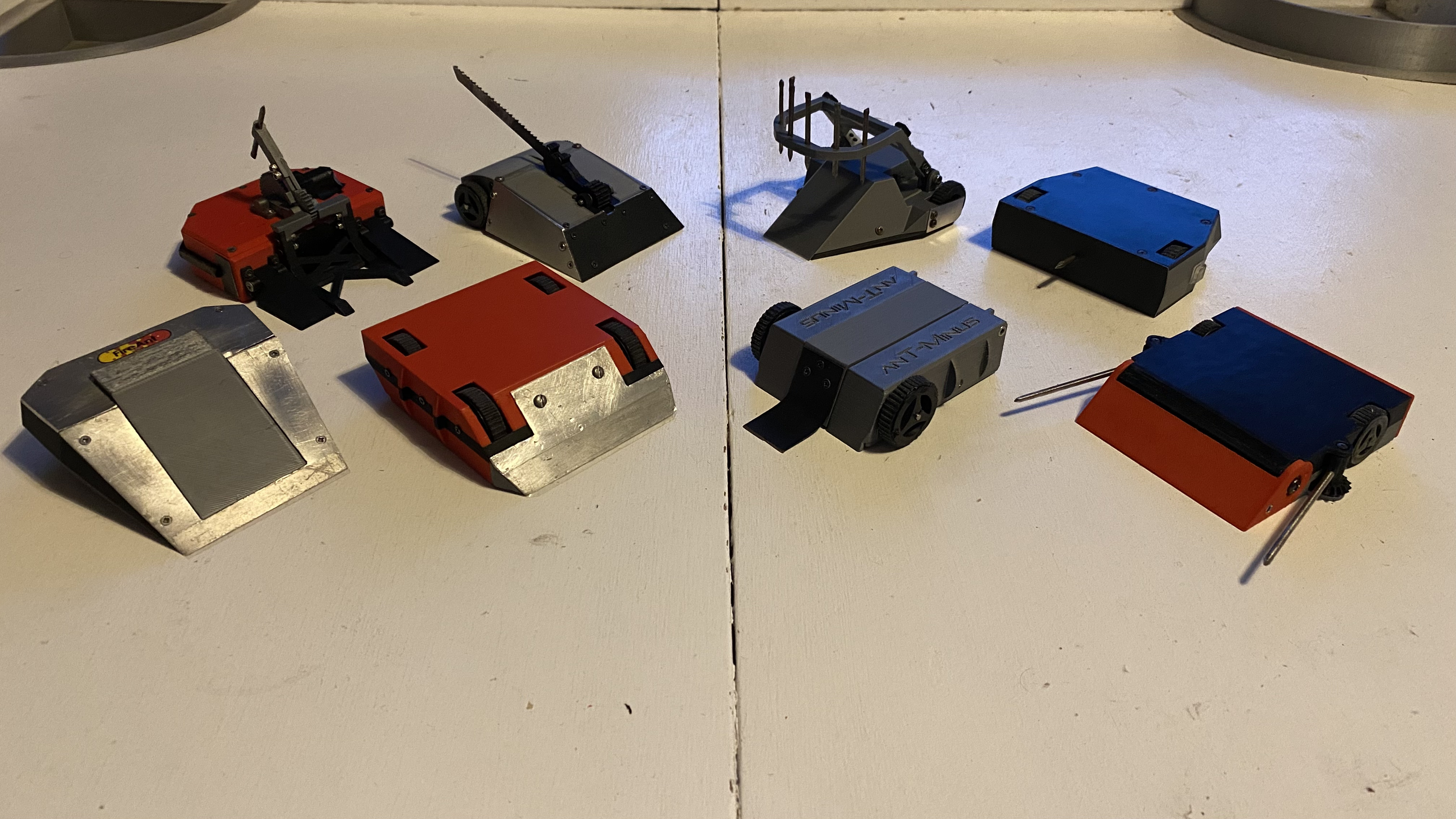
With all that said, lets go through the (still active) bots in roughly chronological order.
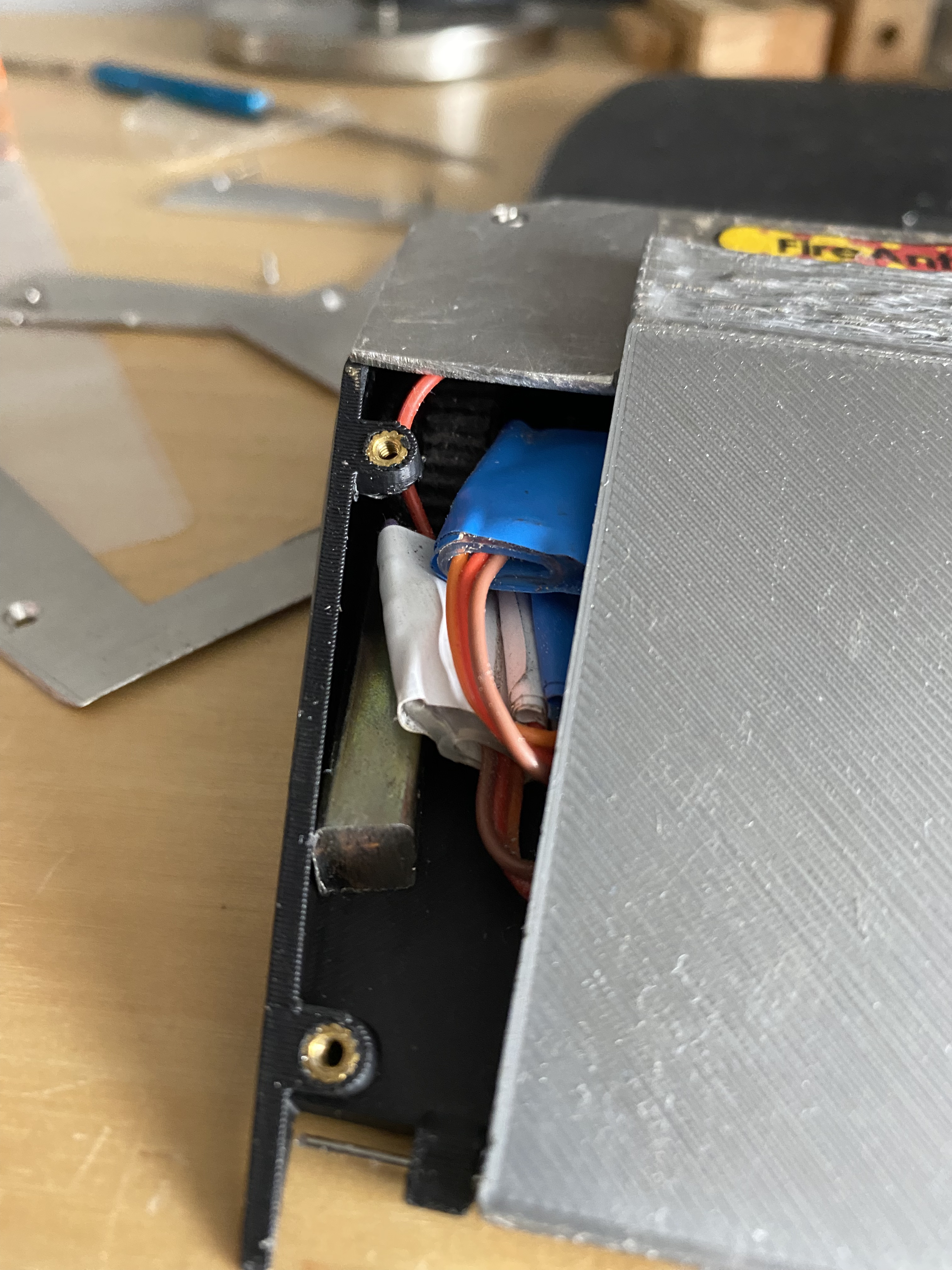
FireAnt

Faced with building my first bot I did the sensible thing and decided to avoid all the design work, building a copy of Alex Mordue’s Firestorm replica on Thingiverse (Antweight Robotwars Firestorm R/C Robot by alexmordue - Thingiverse).

In the six and a half years since then I’ve altered the design quite radically, fitting a power switch, using Pololu HP 50:1s for the drive, ToughHub wheels, replacing all of the internals, using an actual linkage for the flipper mechanism, extending the flipper panel to aid self-righting, mounting things properly instead of using cable ties, replacing the top armour with aluminium and adding more aluminium armour to the sides and rear.
Omicron Mk6

Originally an all-metal chassis made with hand tools (that was as bad as it sounds), Omicron has been refined into a bulkhead chassis design with 0.8mm steel front armour and 2mm aluminium side armour (2mm ASA if using the heaviest hammer). It is designed to be the tank of the group and the 50:1 Pololu HP motors make it one of the more controllable bots on my team.

With many events relaxing rules around size limits, I’ve recently been able to explore using Jigsaw blades as weaponry, with the intention of them acting like Shatter!’s “Mary Special” and sniping belts or attacking the motor cam, being made from high carbon steel, they should hold up pretty well.
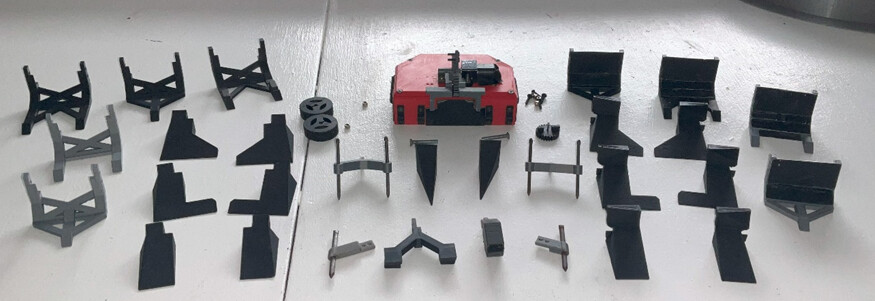
Impact
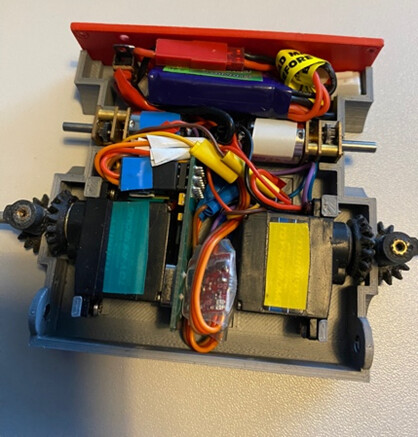
What would happen if you took the modularity and aesthetics of Tornado and combined it with the speed and power of Vladiator? You get an antweight with an estimated top speed of 10.5mph (achievable in 1.39 seconds over 4.75m) and over 5,000 different possible configs (some of which are even within weight!) Four 10:1 Pololu HP motors mean that it is about as fast as you can with brushed motors while still being controllable. The interchangeable scoops, braces, spikes, wedgelets, wheels and the ability to rotate the bottom of the clamshell chassis 180 degrees allow Impact to be set up for a variety of situations depending on the opponent and ruleset.
When an opponent is on the front wedge, Impact can reverse to drag the opponent on top of it using its exposed wheels, then go full forwards to throw them away.
Death Grip

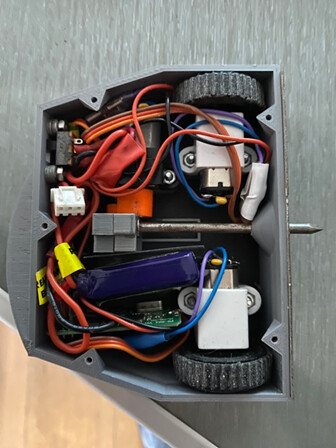
Continuing the theme of combining bots, Razer crossed with Bucky the Robot or SABotage with Lycan. The default “nail jaw” Biter Bot config allows Death Grip to grab hold of wheel wells and other protrusions, while providing defence against overhead weapons including other grabbers. The “SABotage jaw” acts as a flipper and grabber, providing an adaptable fighting style while being the fastest to self-right. The “Slicer jaw” uses three Stanley knife blades angled inwards to clamp down on an opponent’s tyres, should they then try to drive free, the blade will cut into their tyre, either snagging it or cutting away at it. The “Saw jaw” is a circular saw, but due to the gearing setup it can’t actually cut very deep, the saw itself uses the “expansion port” on the top of the chassis which uses an ESC to power an additional function.

Death Grip has been the most successful of my ants, finishing 4th at BotFest 4 in July 2021. Its fast speed allows it to grab hold of an opponent before they can react, before then driving them over to the nearest pit. Due to the tightly packed internals, I’m forced to use a removable link, positioned in the one place that’s defended but also accessible.
A number of Death Grip’s parts, including its chassis and some weapon jaws, are printed in PLA due to its rigidity over ASA, though I plan to swap some parts over to ASA once they cycle out of use due to damage.
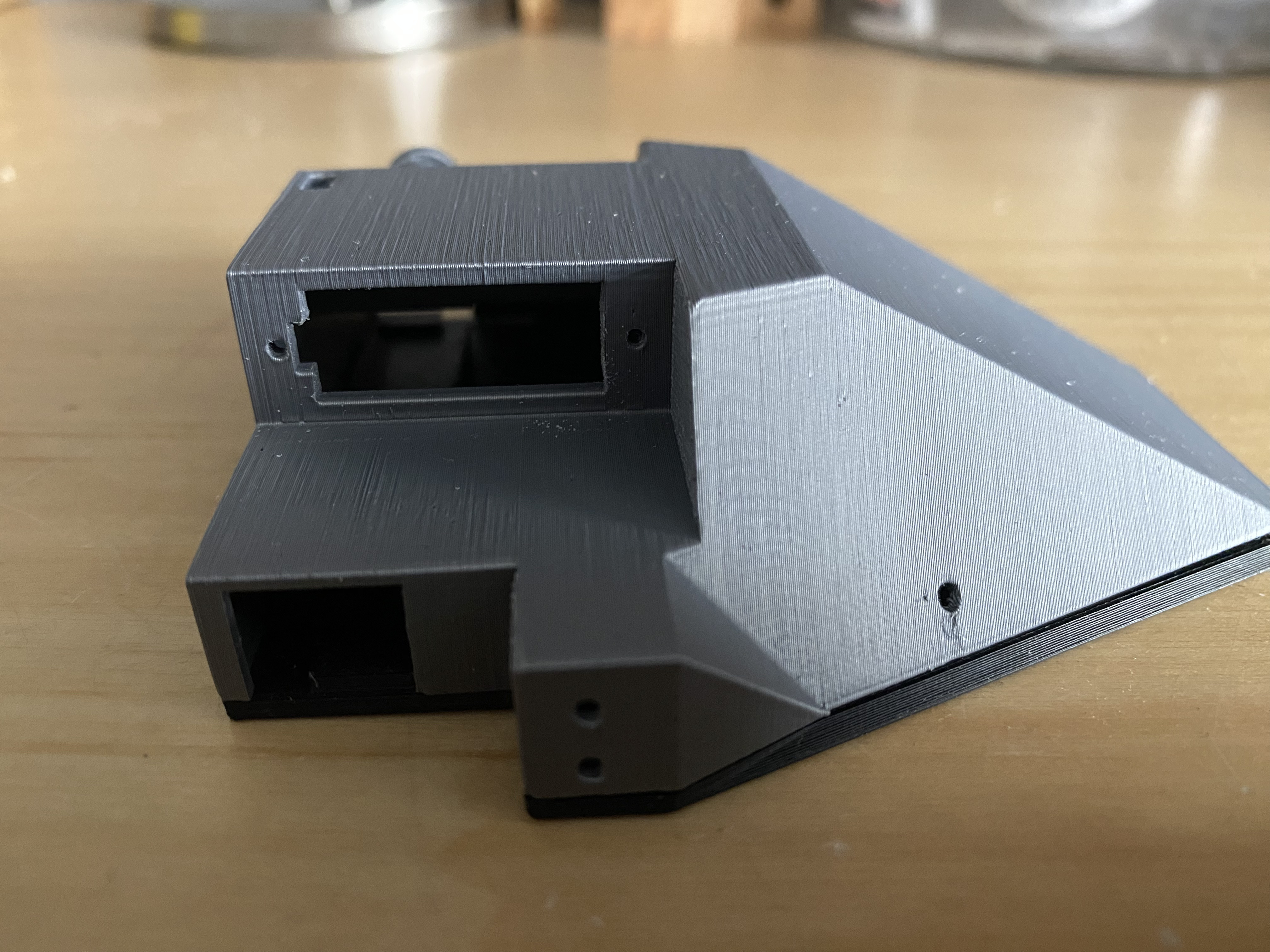
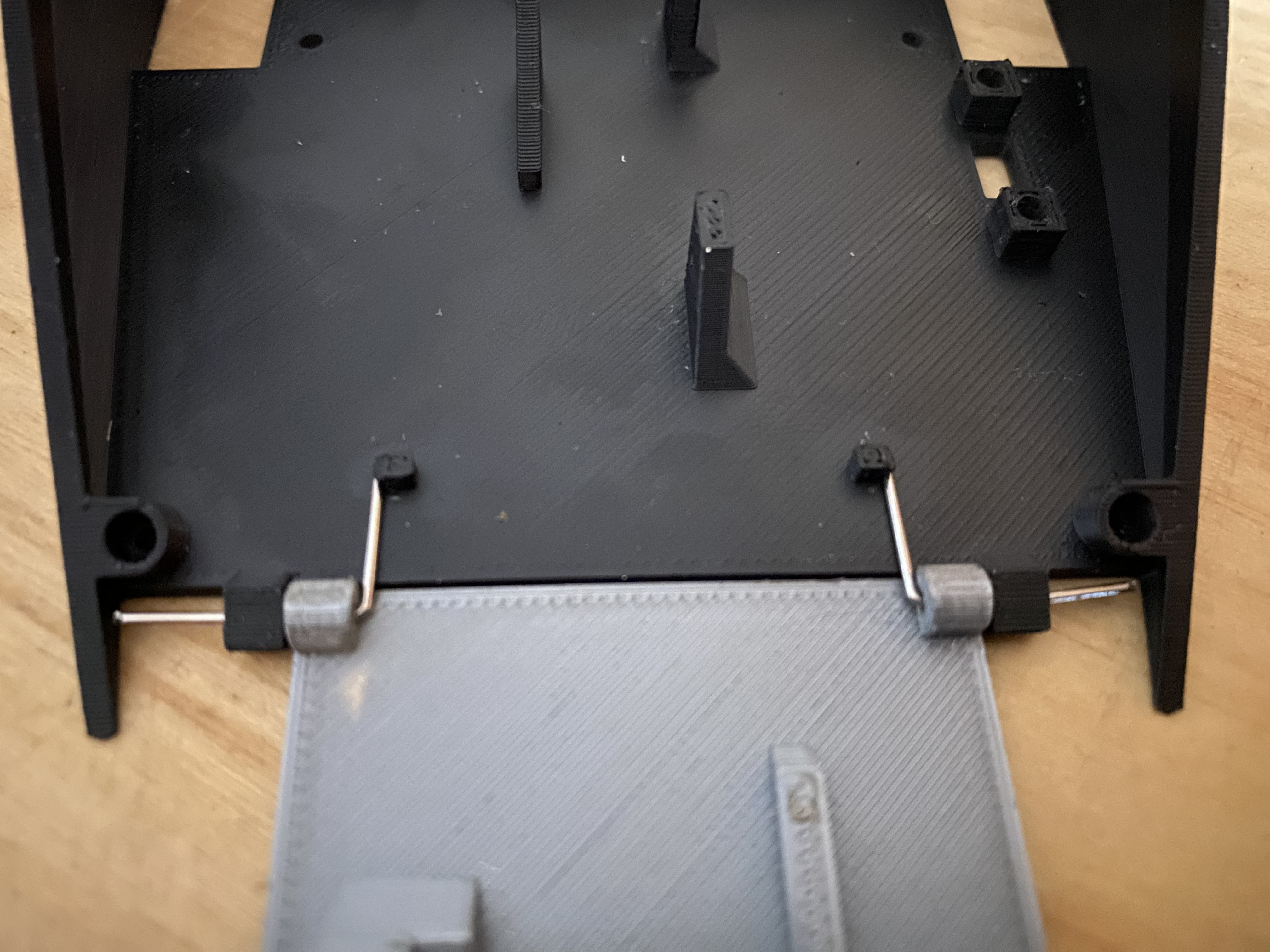
anT-Minus

A friend of mine commissioned me to make him an antweight based on T-Minus, I then continued to develop the design afterwards. anT-Minus also uses a removable link, positioned on one of the side rollover hoops due to the tightly packed internals either side of the central channel which is kept clear for the flipper mechanism.
I’m still experimenting with the flipper blade, currently trying a bent piece of steel to provide strength and increase the weight over the wheels.
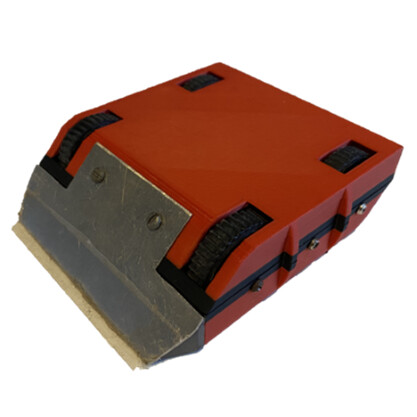
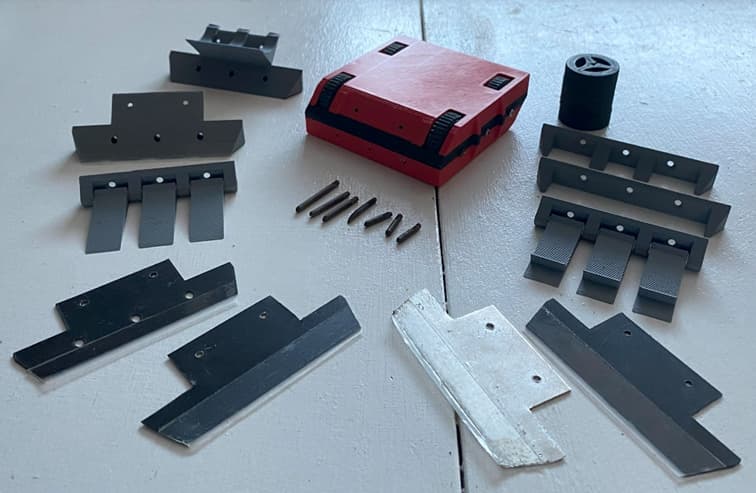
Karabos

Inspired by Greedy Snake, Karabos uses a “snatch and lift” suplex mechanism to save in weight by using a single motor for the weapon. The 250:1 Pololu HP motor uses a hacked servo PCB for an ESC, meaning it runs on 5V, previous attempts running it at 6V would cause the gearbox to fail after about 5 activations of the weapon.
Karabos has 6 grabber options, 9 lifter options, 7 wedgelet/nosecone options and can be setup as lifter only. 0.8mm steel behind the lifter and on the front corners provide an extra layer of defence.
Point101
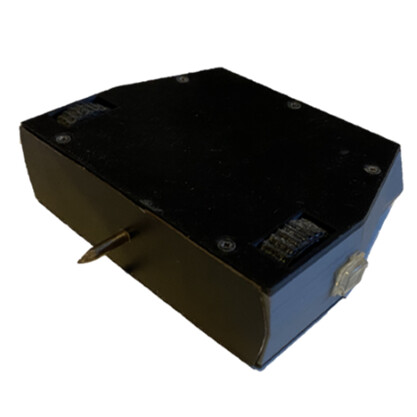
In my quest to try my hand at more weapon types (that weren’t spinners), I turned to the retractable spears of bots like 101 and Point Blank, using a scotch yoke mechanism to turn rotational motion into linear motion to make a reciprocating spike.
The chassis shape is designed to stop it from being side-stranded in any orientation, with the juddering of the weapon helping it get down off a wall. The name comes from it measuring 0.101m from (retracted) spike point to rear and from side to side (before the bumpers were added) as well as the two bots that inspired it.
SideStrike

Originally meant to have twin side axes like many a RA2 bot, size and weight constraints meant that SideStrike ended up with twin articulated lances (or waggle sticks) giving it an almost 9 inch wingspan. The wheels were originally at the rear of the chassis, but I moved them forwards to alter the weight distribution to improve traction. The hinged wedge at the front has a 3mm thick steel rod in it to help it reset whenever the bot is flipped over, it also acts as a defensive measure against flippers who attack prematurely.
Bludgeoner

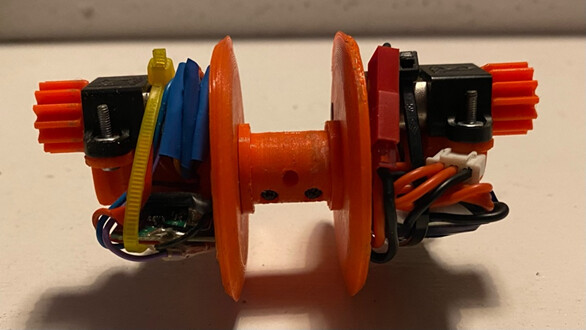
A Stinger inspired torque reaction thwackbot with all of the electronics mounted to the chassis and enclosed by the wheels. 5 wires link the two halves of the electronics together. The anti-slip tape (sticky back sandpaper) on the 54mm wheels allows Bludgeoner to climb up on top of opponents and are powered by 75:1 Pololu HP motors to provide the torque required for the weapon while keeping the speed at similar levels to the other antweights. The two halves of the chassis are printed in PETG as the ASA prints kept failing. The weapon arm has a 3mm steel rod inside it to provide weight and stiffness.
I’ll be taking the full compliment of ants to SCAR 4 with a few of my friends sharing driving and maintenance duties with me.