V2.0 Upgrade package 1 & Shoveron 3.0
(Above Revron 2.1)
Since AWS I’ve unfortunately missed a few events I had planned to attend, so to get my Antweight fix I’ve had to settle for to re-watching fights from previous competitions. With a bit of time having passed I began to notice a few differences between how I would have to drive Revron compared with how other verts would fight. My typical weapon setup has two relatively shallow teeth and to get good bite I would need to find space in the arena, line up a shot and floor it. While this worked it leads to a couple of issues when fighting fast opponents, wide opponents or should the drive ever become compromised. In all these cases where I couldn’t get a run up bite would be poor and result in grinding rather than the roof shots I’m looking for.
A secondary issue is long forks, my sprung setup has worked great however if the opponents forks are longer it doesn’t really matter how well as set of shorter forks follow the ground if the rest of the robot has already been lifted up.
Finally there is Dissector an incredibly scary overhead friction saw and my only tap out to date. Revron has been long overdue some top armour and drawing that robot at SCAR made me realise just how vulnerable my design was to overhead attacks.
Weapon system
The obvious solution to this is to run a single longer tooth however this also has downsides such as being less likely to win exchanges with drums and beater bars. Luckily for me I’d designed a modular weapon system for V2.0 so in theory if i designed a second weapon module I could choose from either depending on the opponent.
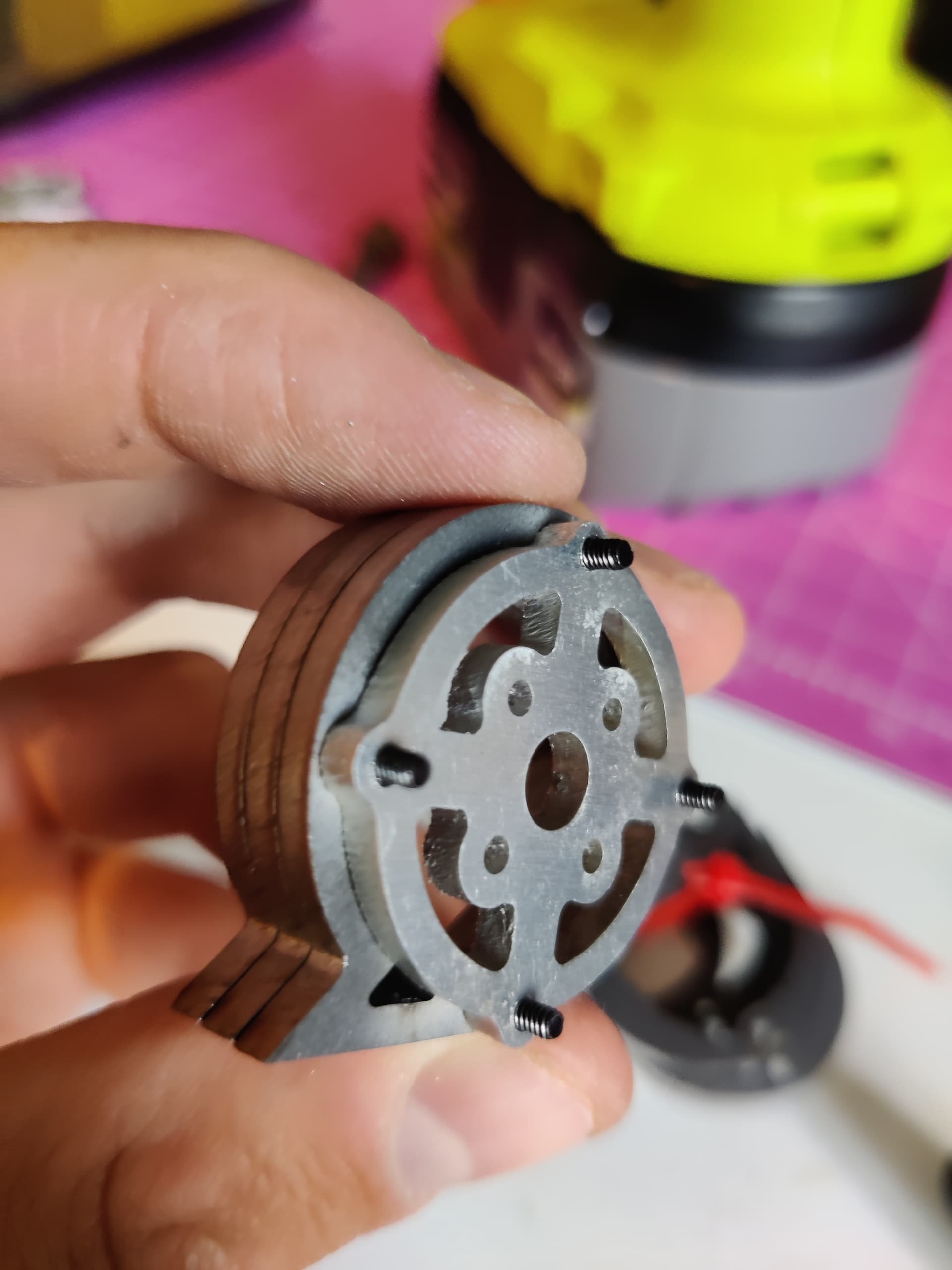
The weapon has been the one bit of Revron that to this point had remained unchanged from the very first version. When i started to design the single tooth drisk I realised the design could be improved by replacing the Hardox section that mounted to the motor with an aluminium “spider” instead. This removes mass from close to the centre of rotation and saved enough weight to add a third outer hardox blade boosting the moment of inertia quite substantially.

(Above original Drisk blades)

(Above single tooth parts)
I lengthened the tooth and designed the outer profile of the blade first before creating a centre of mass feature in Solidworks and the measuring out all my mounting holes from this point to ensure a balanced asymmetric design.
(Above final assembly)
Testing was incredibly promising with the bot happily throwing around a set of old beetle weight side panels from its much larger sibling.

(Above single tooth weapons system test)
Ground game and top armour
To solve the fork problem I borrowed an idea from shrimp and derive and printed a set of long TPU forks designed with a bit of spring built in so the material follows the floor. These are very light compared to the sprung steel setup and worked better than expected.
For top armour I printed a stood off TPU cover plate with a void to allow for the insertion of a Ti plate and angled internal ribs to deflect and absorb impacts from hammersaws. This is secured using a second set of heatserts in the top of the chassis.

(Above Long TPU fork and top armour config)
Sheffield Roboteers fightnight 6
I got version 2.1 finished just in time for the sheffield roboteers fight night and headed across for a pre AWS 71 shakedown. The draw was a pretty tough one, with qualifiers against several robots that’d beaten Revron previously including Paranoia the previous roboteers champion and a hammersaw based on the broken link robotics derive design.
The modules and upgrades worked flawlessly with Revron winning five fights back to back to take the title. One side effect of the new weapon design was instant self righting. Previously Revron would run upside down across the arena and self right by hitting a wall, now it was more prone to pop itself straight back onto its wheels due to the larger tooth which is a happy accident.
Interestingly I also put an older version in for some rumbles and whiteboards and this design did not perform as well showing that the incremental progress made over the last few iterations really helped.
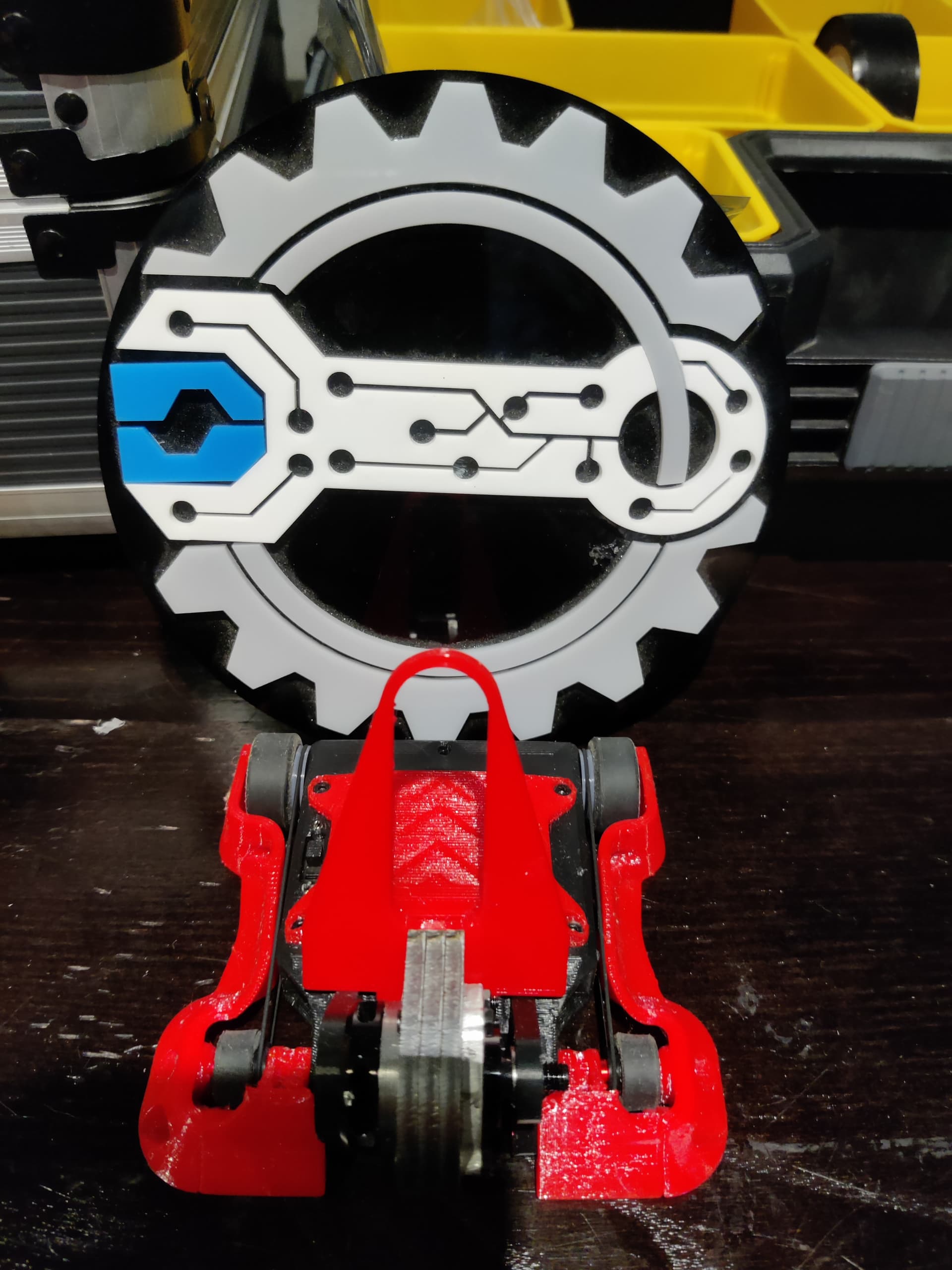
(Above after an afternoon of competition)
Shoveron

Shoveron has gone unmentioned since my first post and its been through a few changes since then and has also often been driven by my brother. It has remained a 4wd bot and gained a set of active lifting tusks reminiscent of panic attack. It’s been a relatively enjoyable bot to run if a little slow in the drive department running a now very old set of 1200 rpm motors.
After putting so much development time into Revron I felt now was a good time to have a rethink of the Shoveron design and also a chance to reduce the spares needed for each event. I redesign Shoveron V3.0 with an identical chassis and drive system to Revron 2.0 and added a flipper system that uses the top armour and weapon mounting points found on the vert. This means I can in a pinch use spares from one bot for another and made for a nice design challenge. Additionally given the chassis was designed to make weight for quite a heavy vertical spinner This enables Shoveron 3.0 to run a seriously chunky steel flipper arm. This bot is currently under construction and should debut at AWS 71.

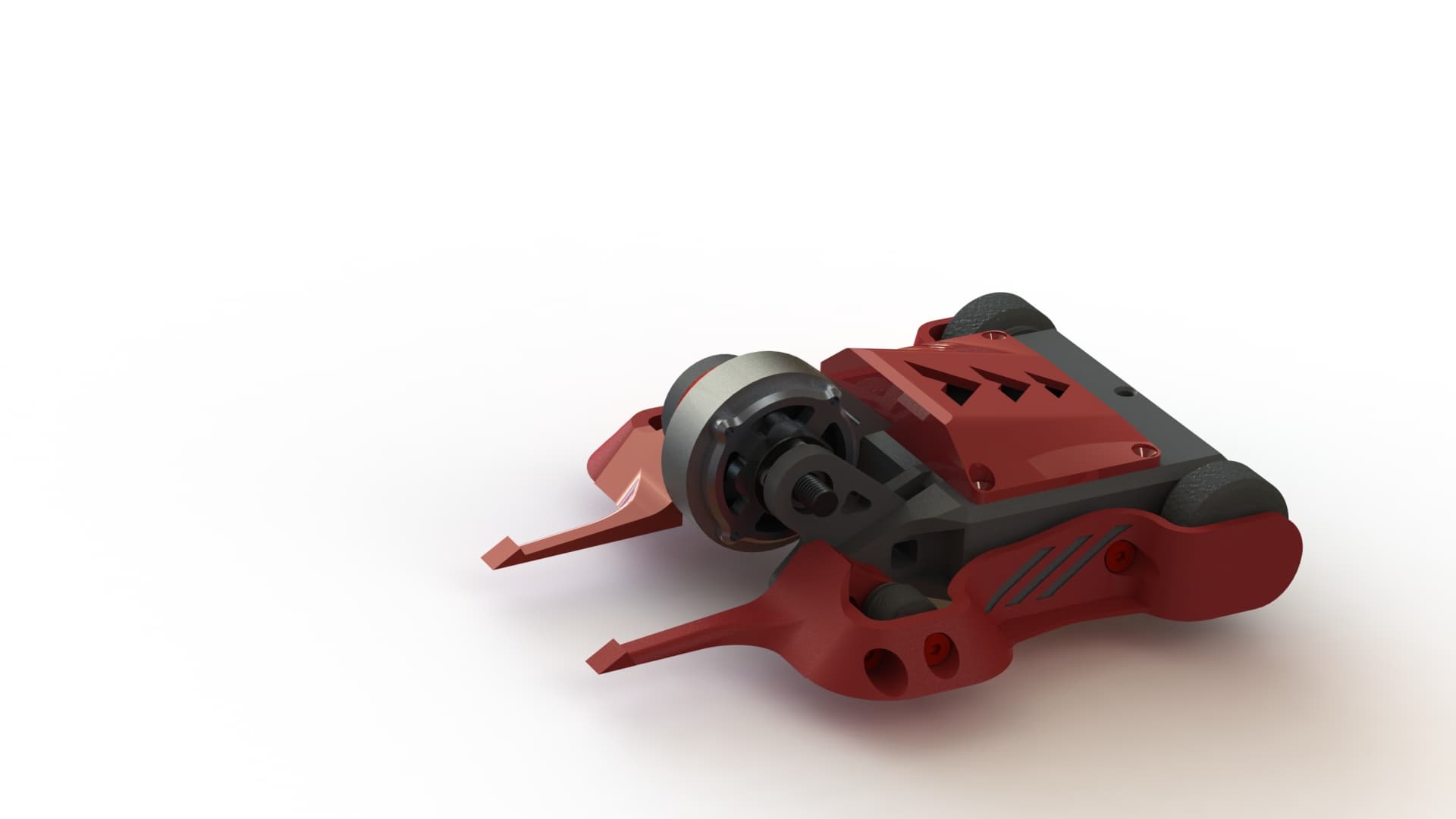
(Above Shoveron V3.0 CAD)
Open Source
Alongside these upgrades I’ve also put together a full BOM, CAD files and an assembly guide for Revron. This guide is currently being worked through by a few builders to trial the process and once I’ve got feedback I’ll be releasing the files and guide on Printables. If the Shoveron update works well I’ll also add that as an option.
Thanks for reading!