Summary
My attempt to try and make an antweight, there’s going to be lots of going round in circles.
This is my first attempt at building a combat robot, and I’m planning to use this as a log for build updates and to ask questions along the way. While I’m fairly comfortable with the CAD side of things, but the electronics are uncharted territory, so we’ll see how it goes…
I kicked things off by buying a bunch of stuff, mostly based on the antweight kit from the BBB shop, and basically straightaway fried a ESC (thanks again for the help with that, Joe). After some trial and error, here’s where I ended up:
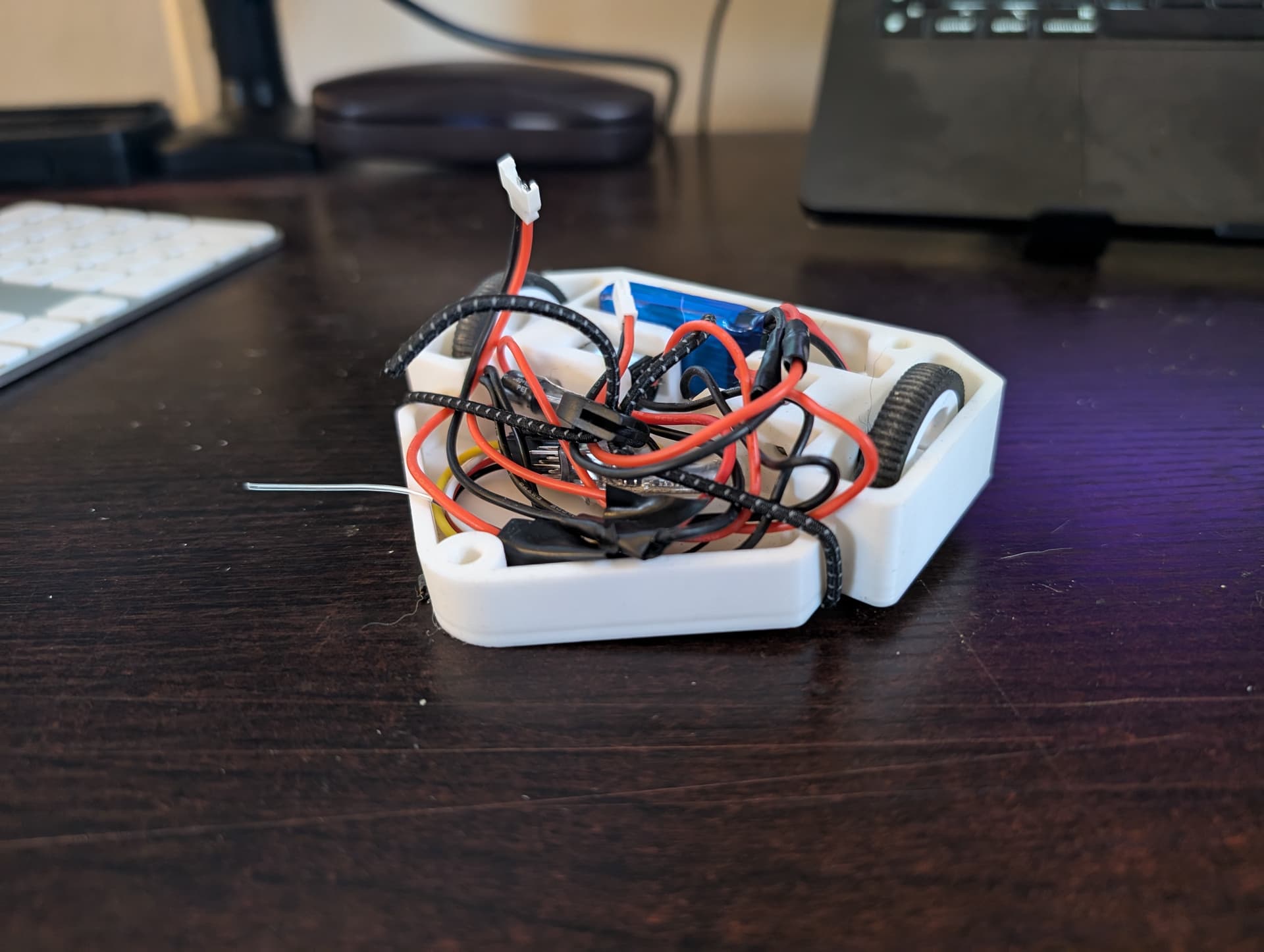
I wanted to keep things simple at first, just to get a feel for how to drive something like this and how all the components come together. I was going to finish this but I keep pulling the electronics out to test things.
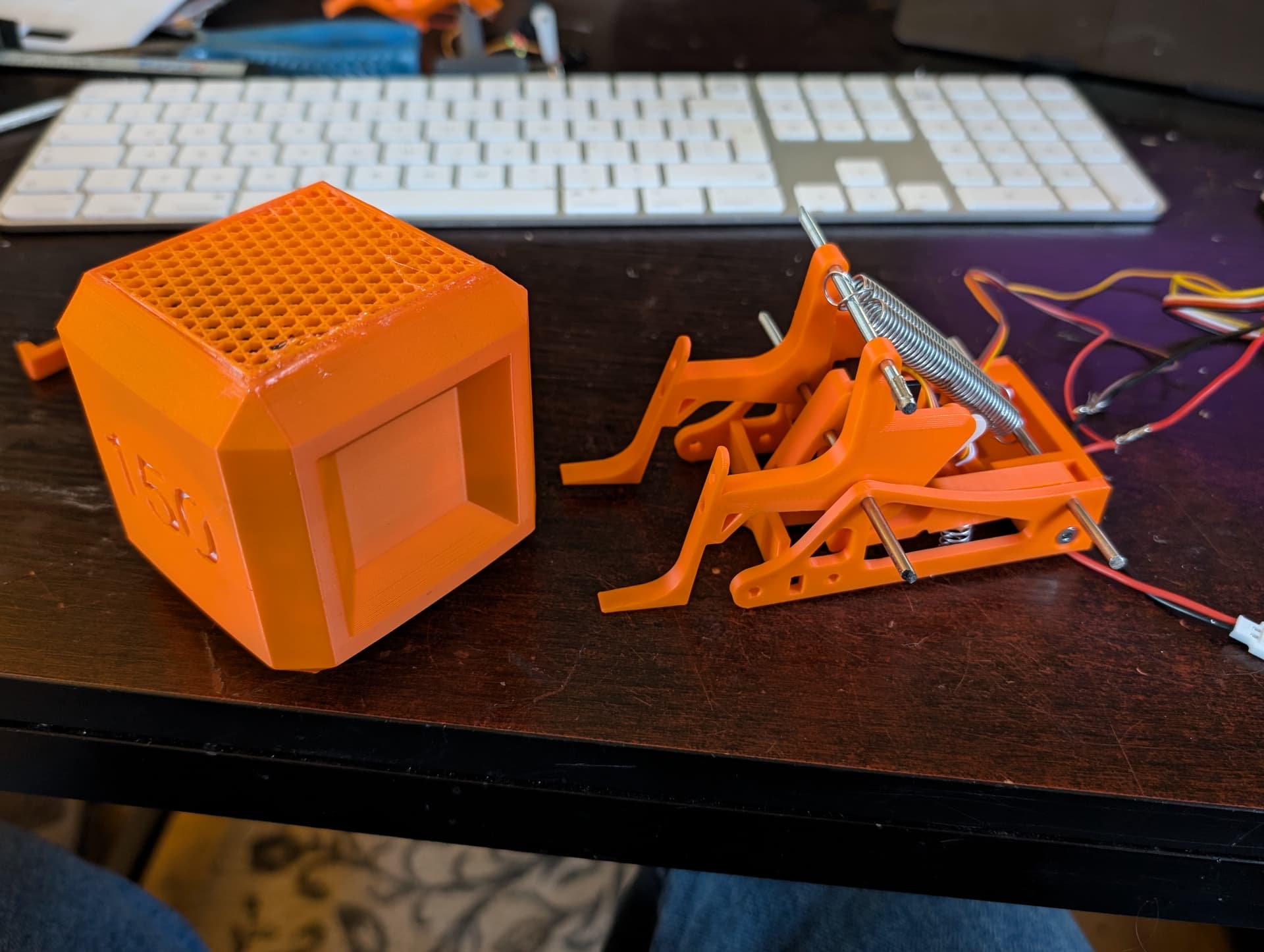
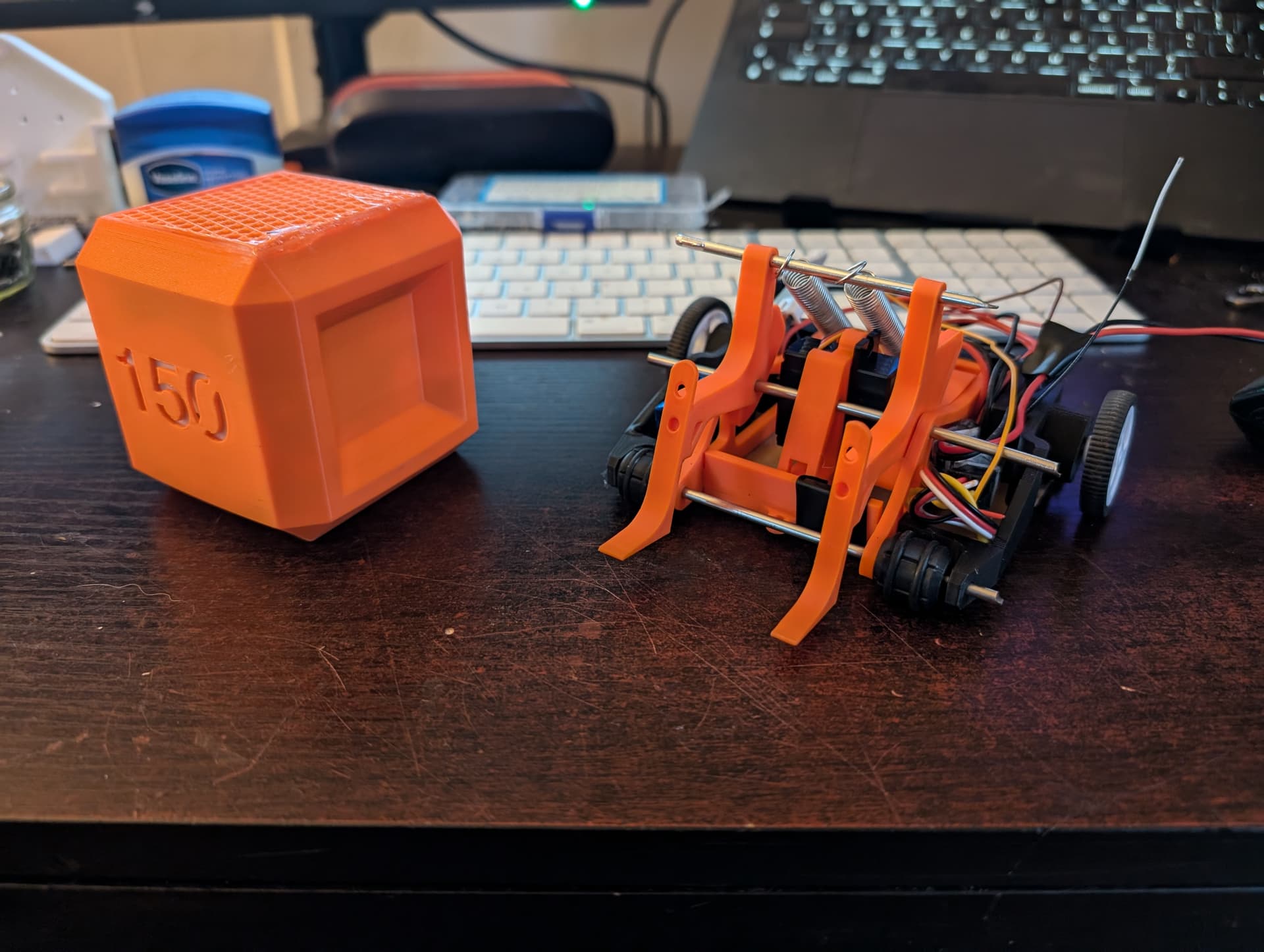
After a bit of research I decided the goal was to build a flipper. After a bit Googling, I came across this Snail Cam mechanism that looked promising, but I didn’t want to buy more parts. So, I decided to try the “Servo Latch” mechanism instead:
Before fully committing to this, I wanted to build a test to see if it would work in practice.

There’s still a lot to figure out. For one, I’m not entirely sure why I put the servo on that side—it’s adding a level of complexity I probably don’t need. I also need to work out the servo’s range of motion to figure out where to place the pins to get the most energy out of the mechanism.The elastic mounting could definitely use some improvements; it’s bending more than I’d like. I might need to add some bracing somewhere, we’ll see, but it’s time to try and combine them.