*citation needed
me and simon szarko have been building clusters on and off for the last 5 years and known eachother for nearly 7 years.
our clusters have been running since the 2020 champs sxs and have never been beyond the top 32. our goal for the last few events was a top 16 finish and weve not quite managed it. this is where i would do a bit of a breakdown of the previous bots we have fun but that feels like far too much work as we had many robots over the years. rovengers however were always multiple parts which we could sub in and out depending on the opponent. if we actually built them well they would of been pretty good. alas we did not and simon has been busy so we havnt really ran proper clusters for a while
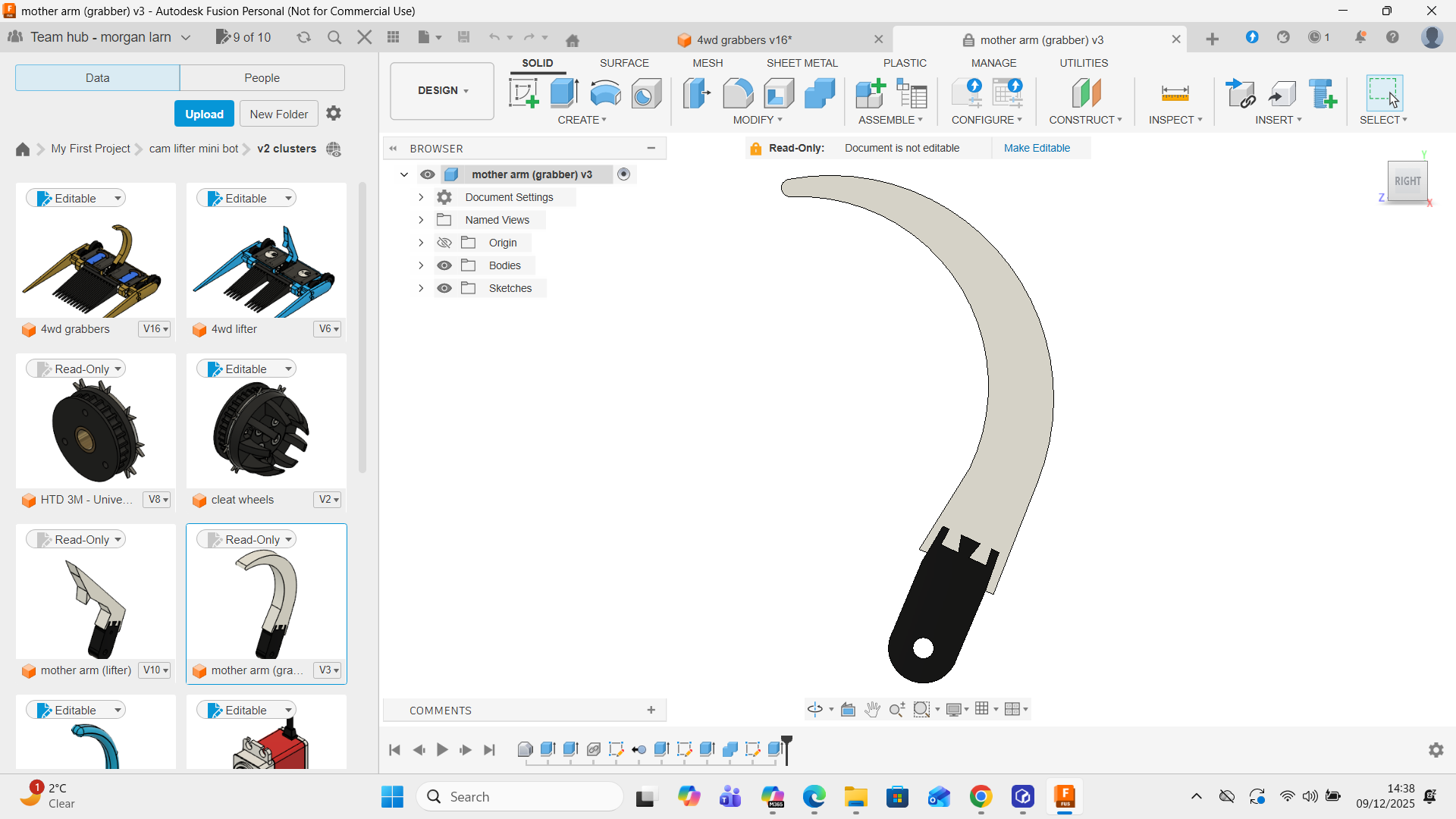
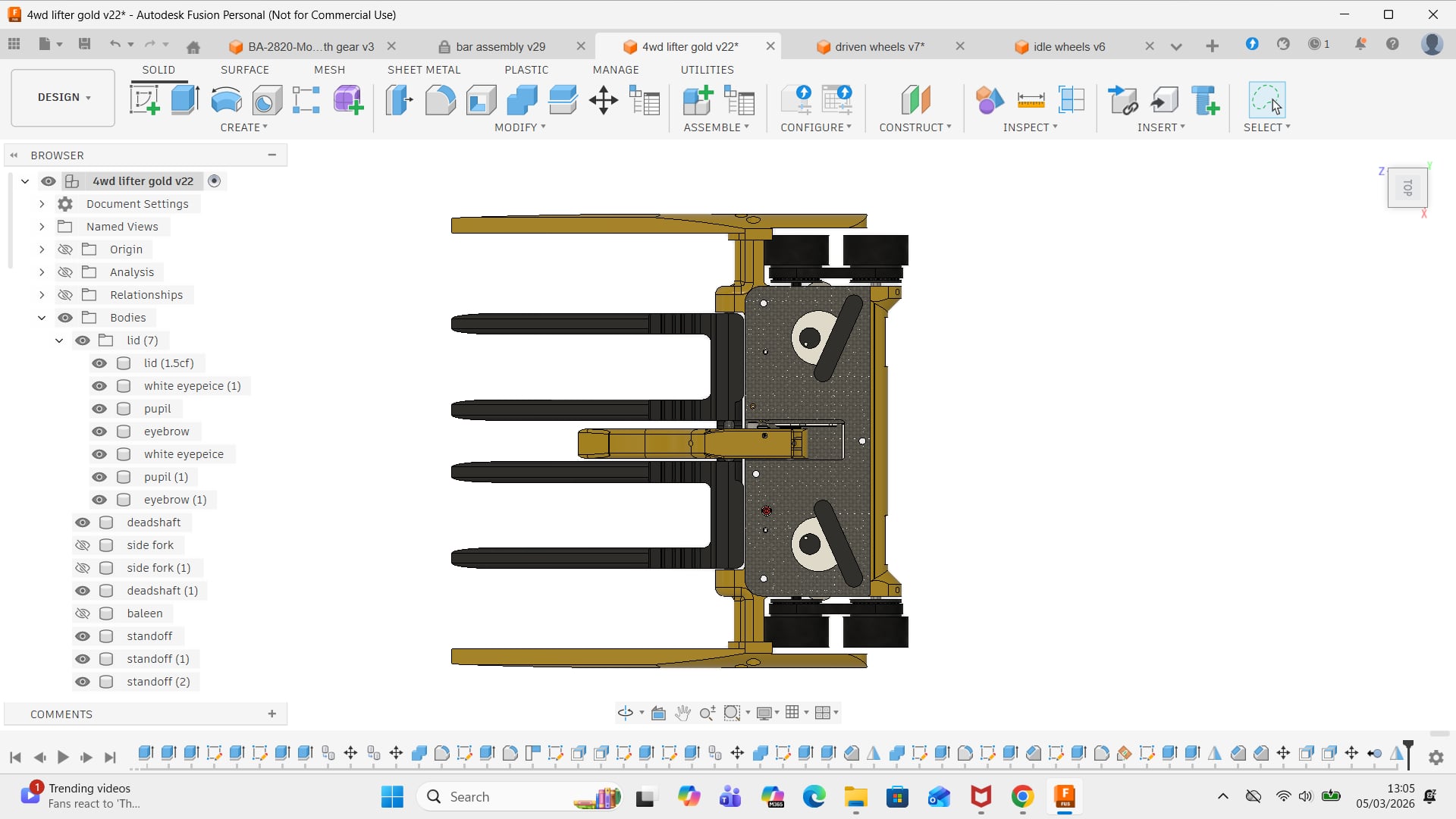
the design for rovengers 2 started when i showed simon some cam lifters which he started to design and came up with this beast
they had 4 servos between them and some 3mm hardox forks. would of been very annoying to face
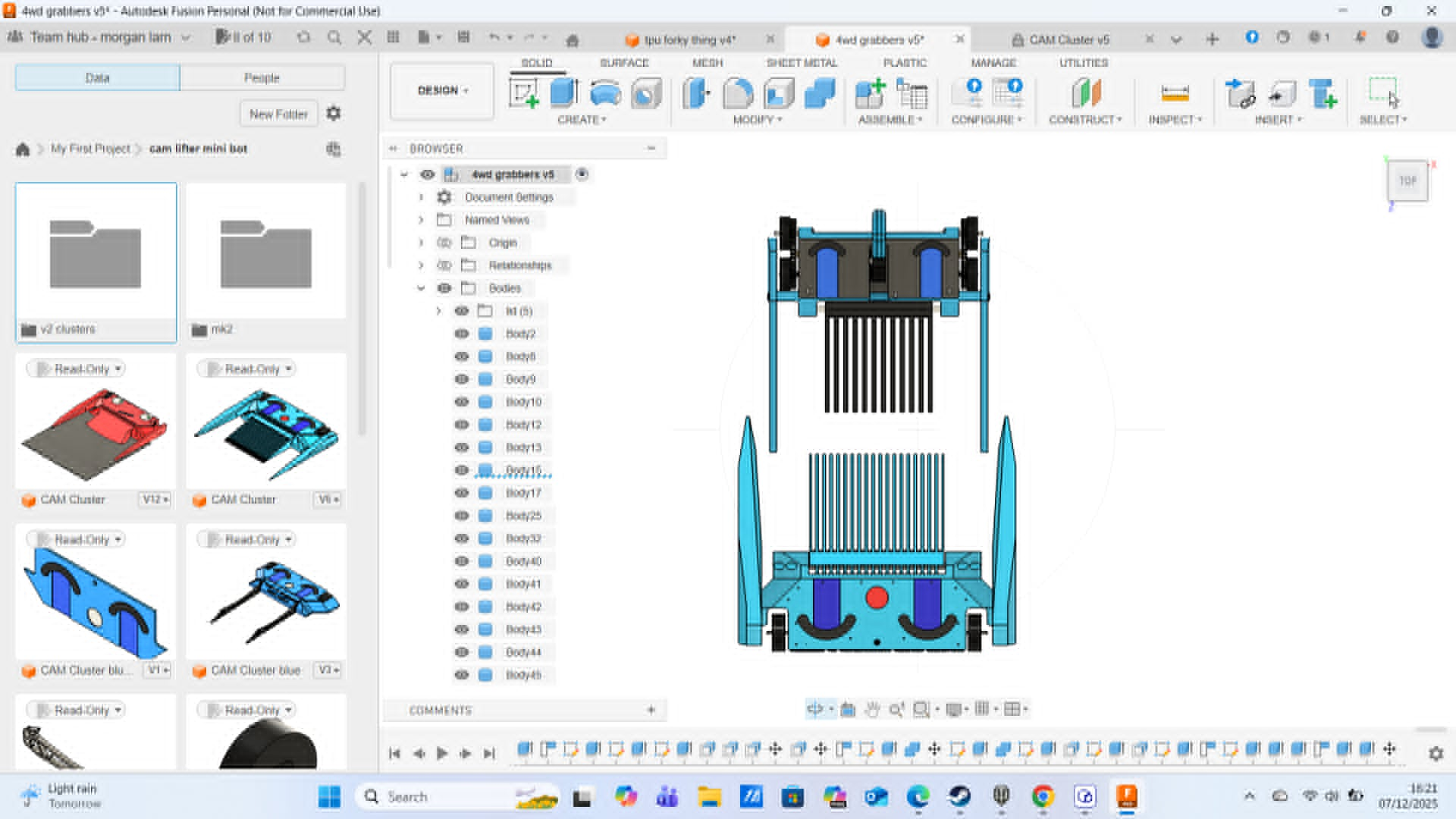
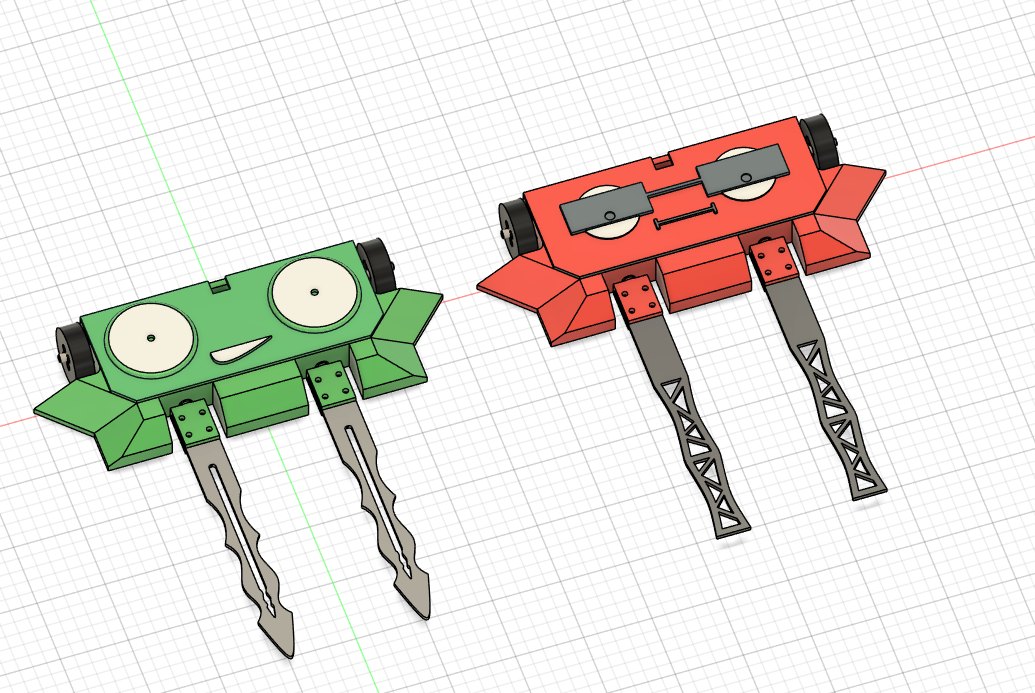
however as time went on and we signed up for champs we realised we really didnt have time to make them with cam lifters so we pivoted to these
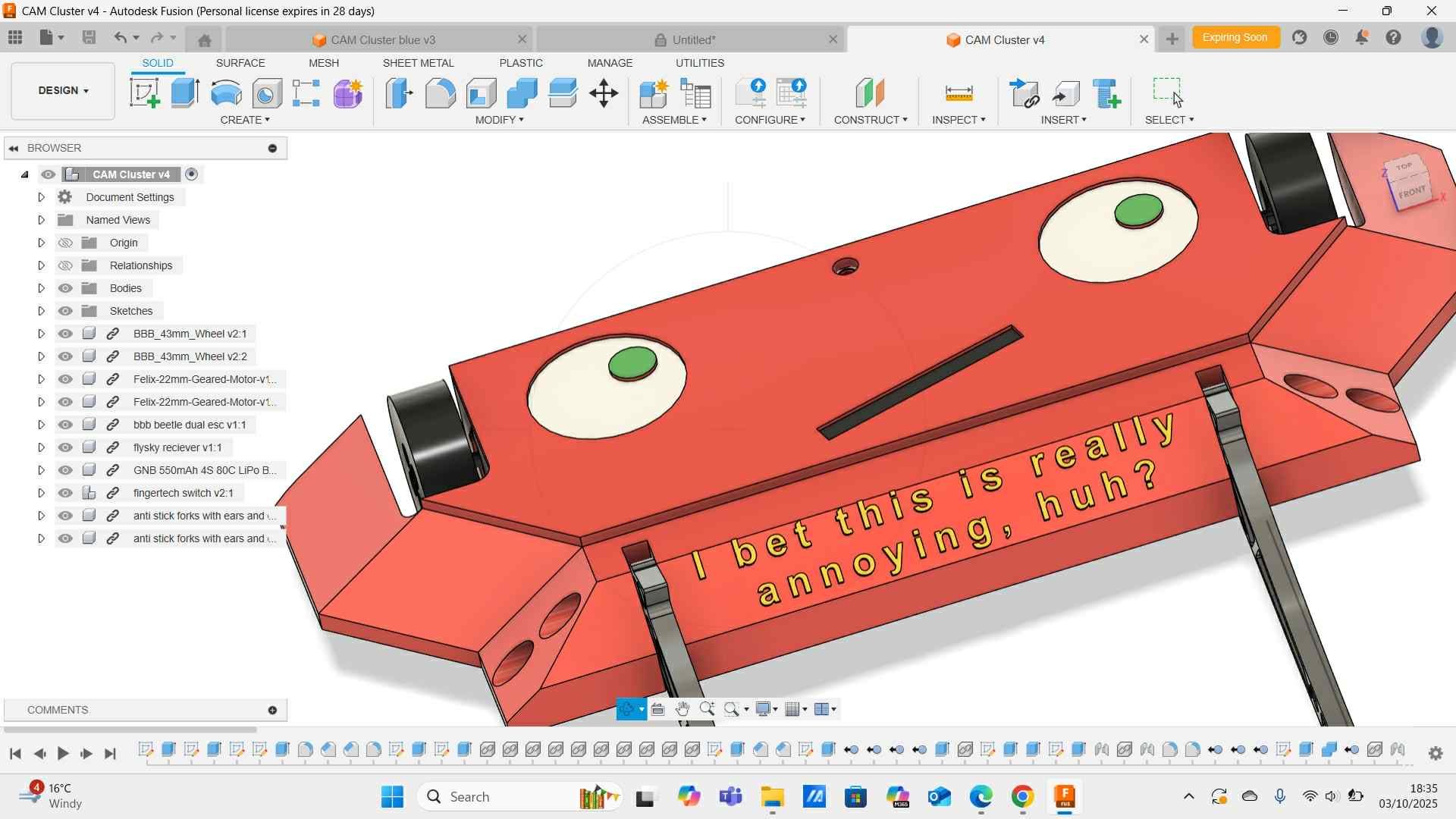
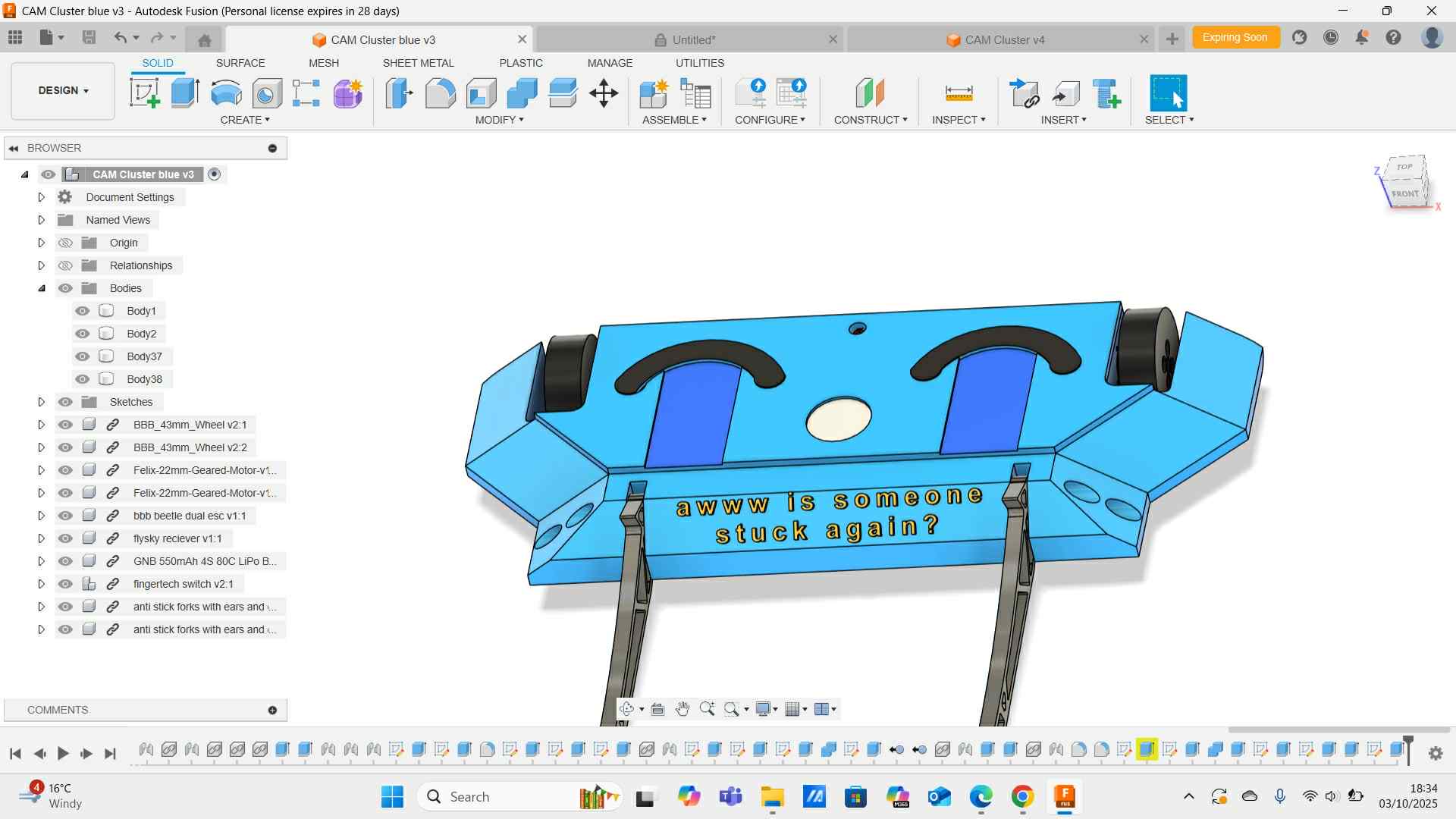
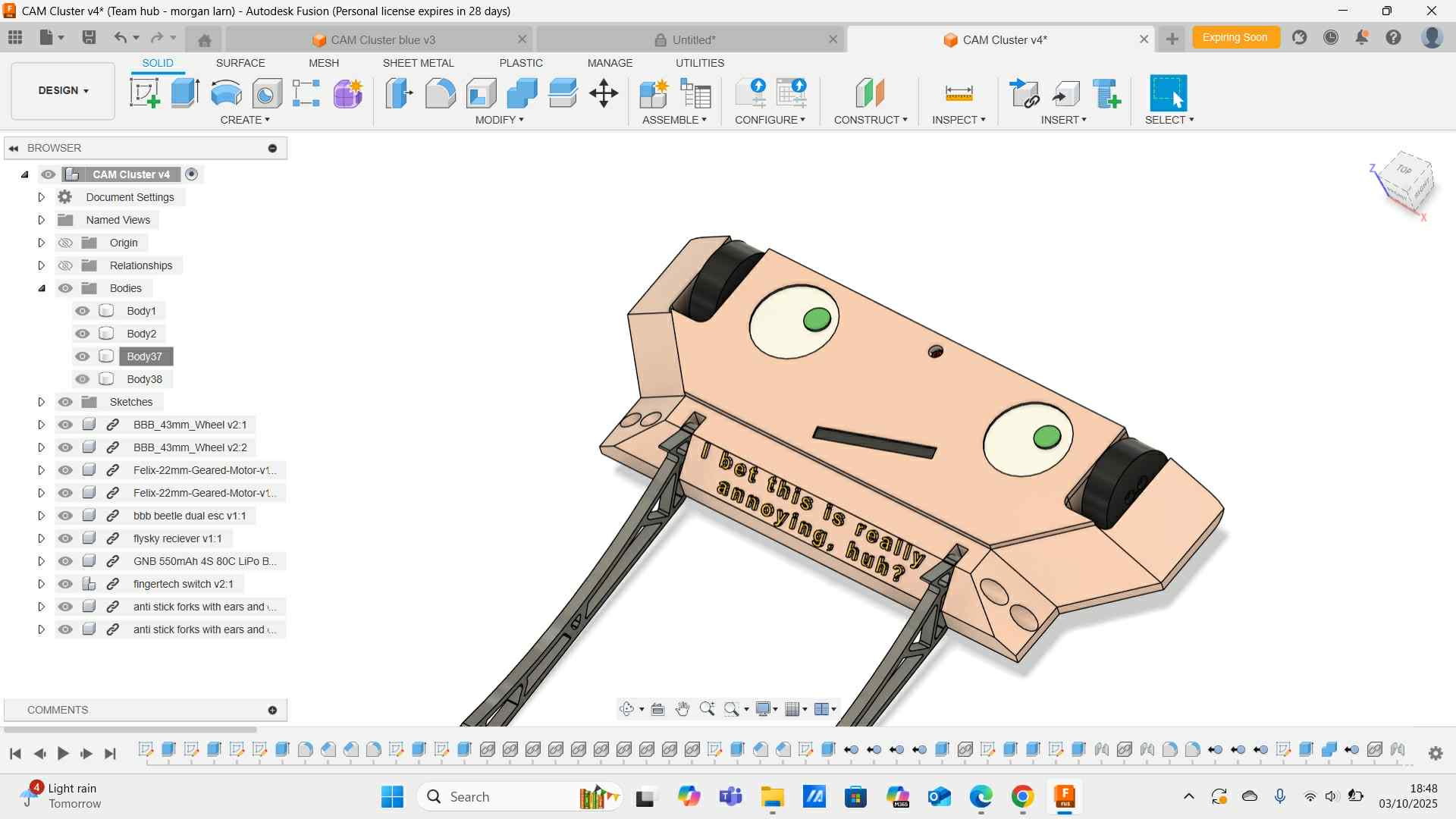
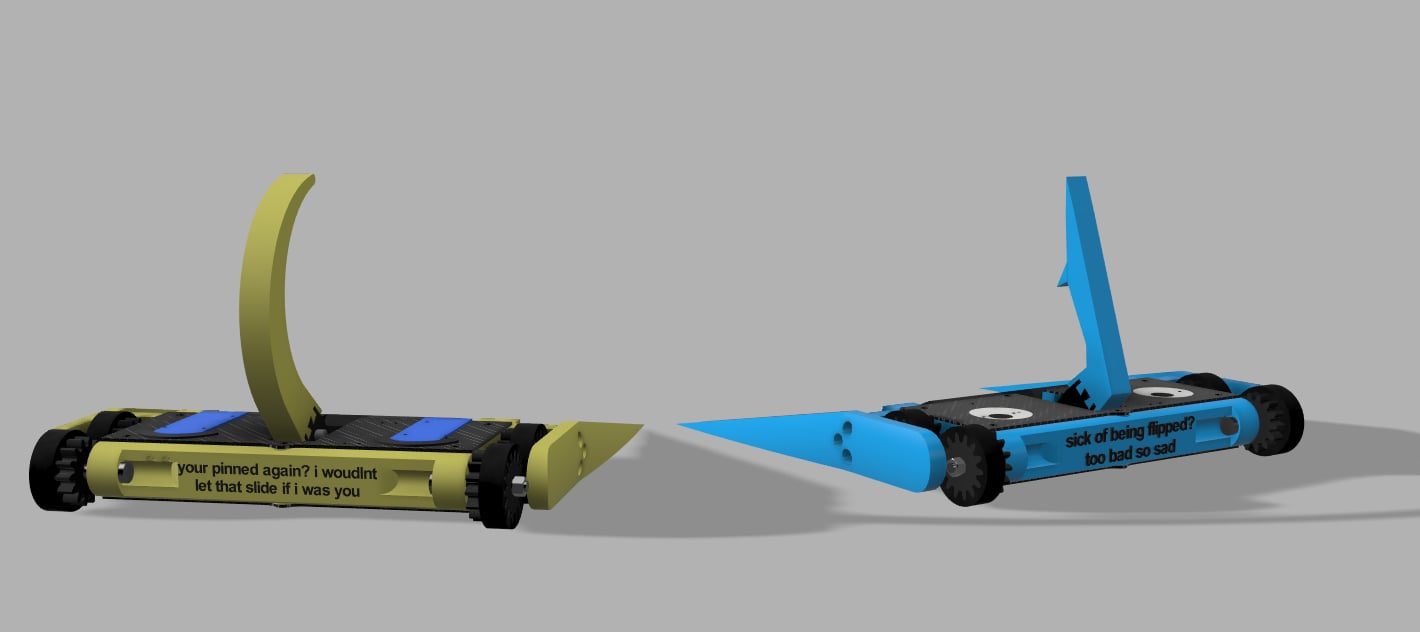
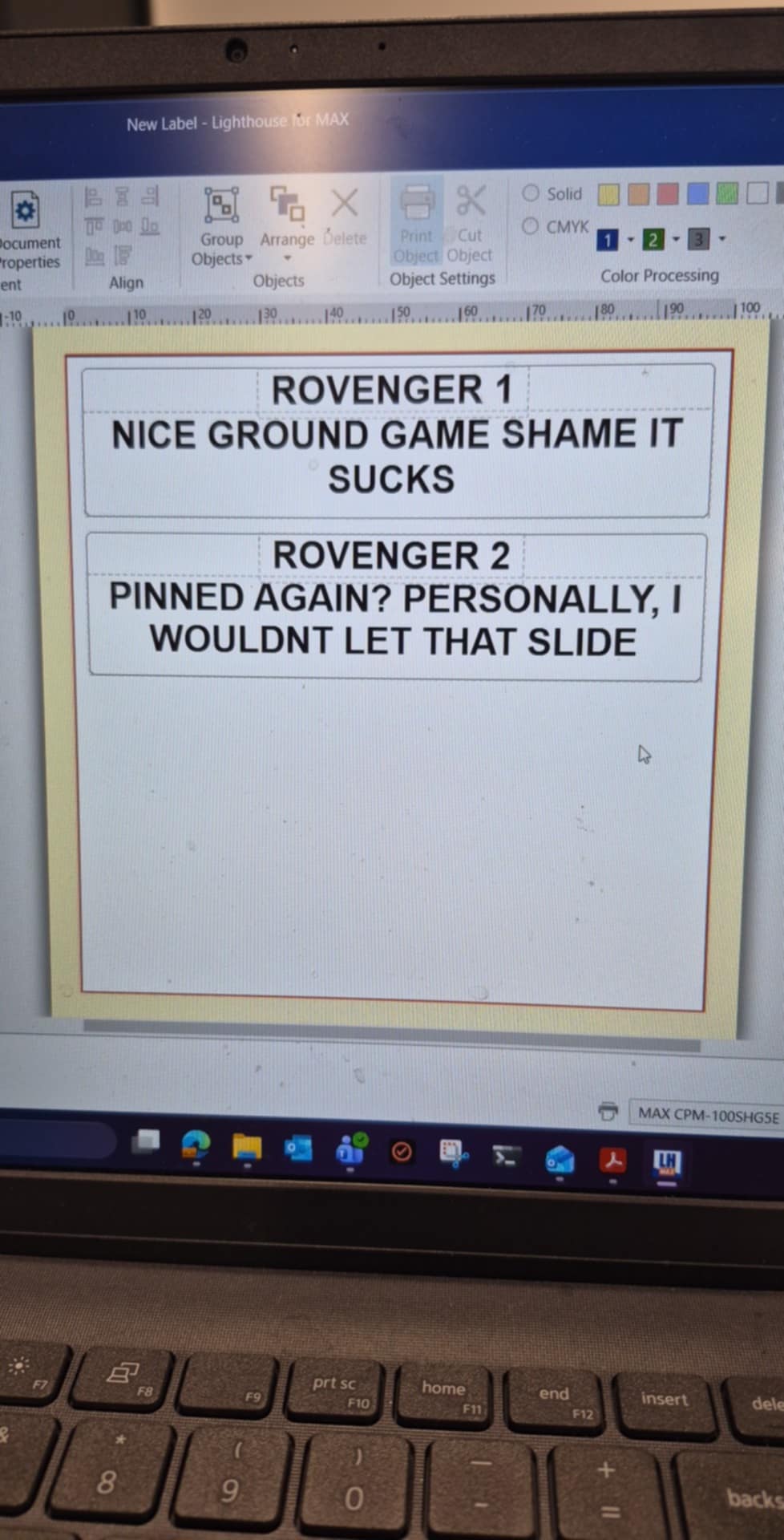
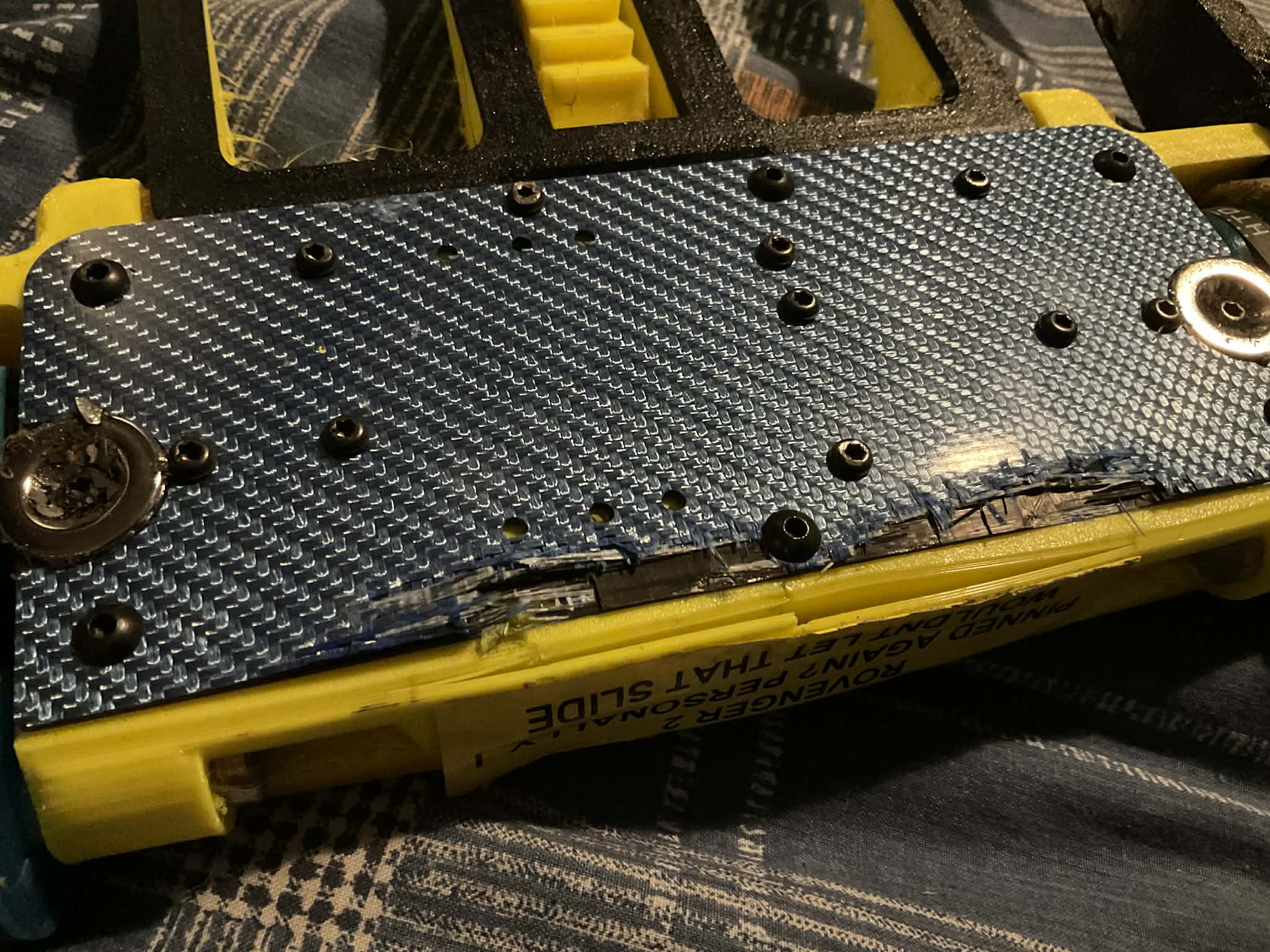
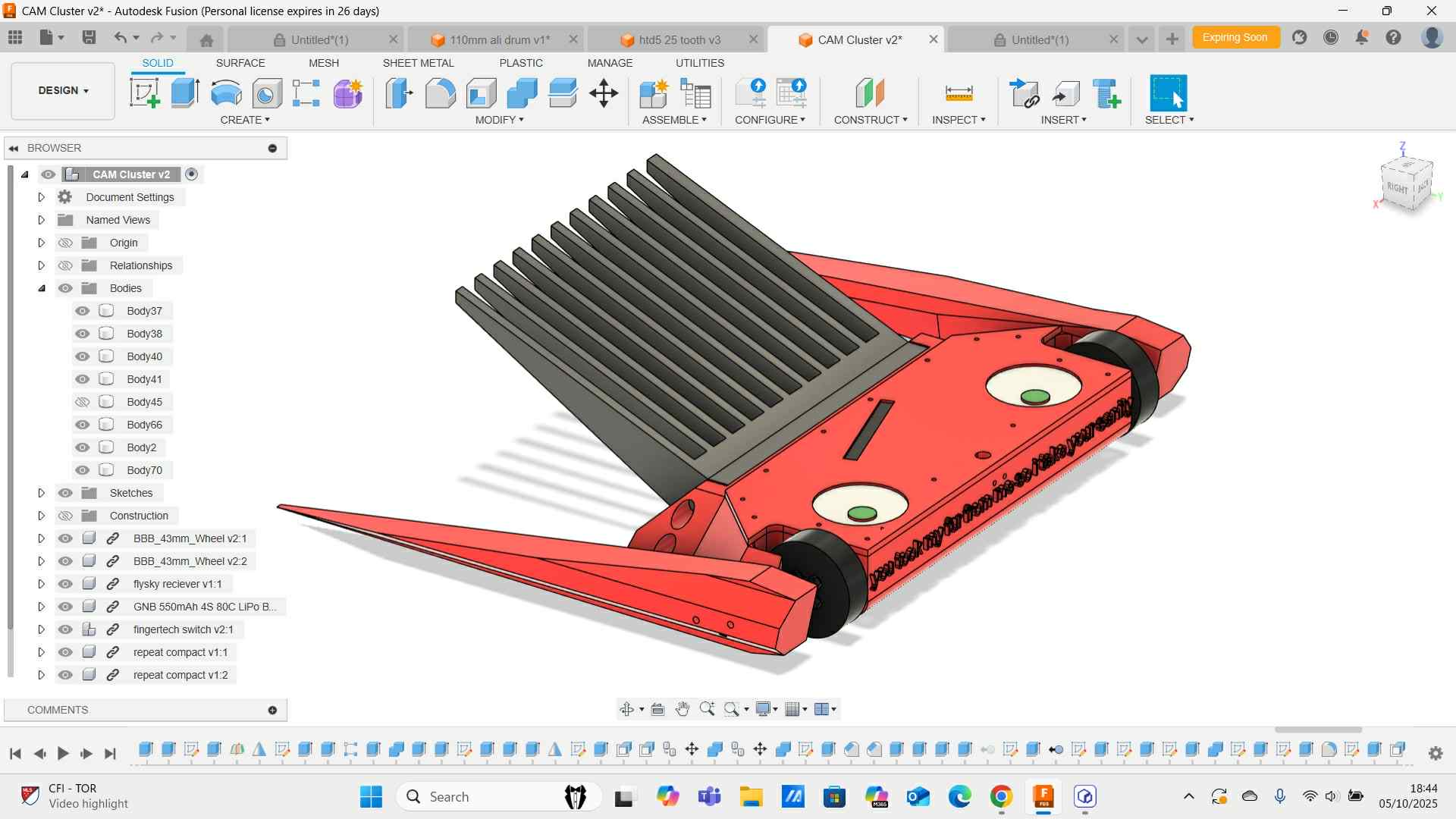
it was around this time we also decided the main weapon should be rage bait hence the faces and slogans. we did mess with the idea of printing them red and spraying them skin-tone

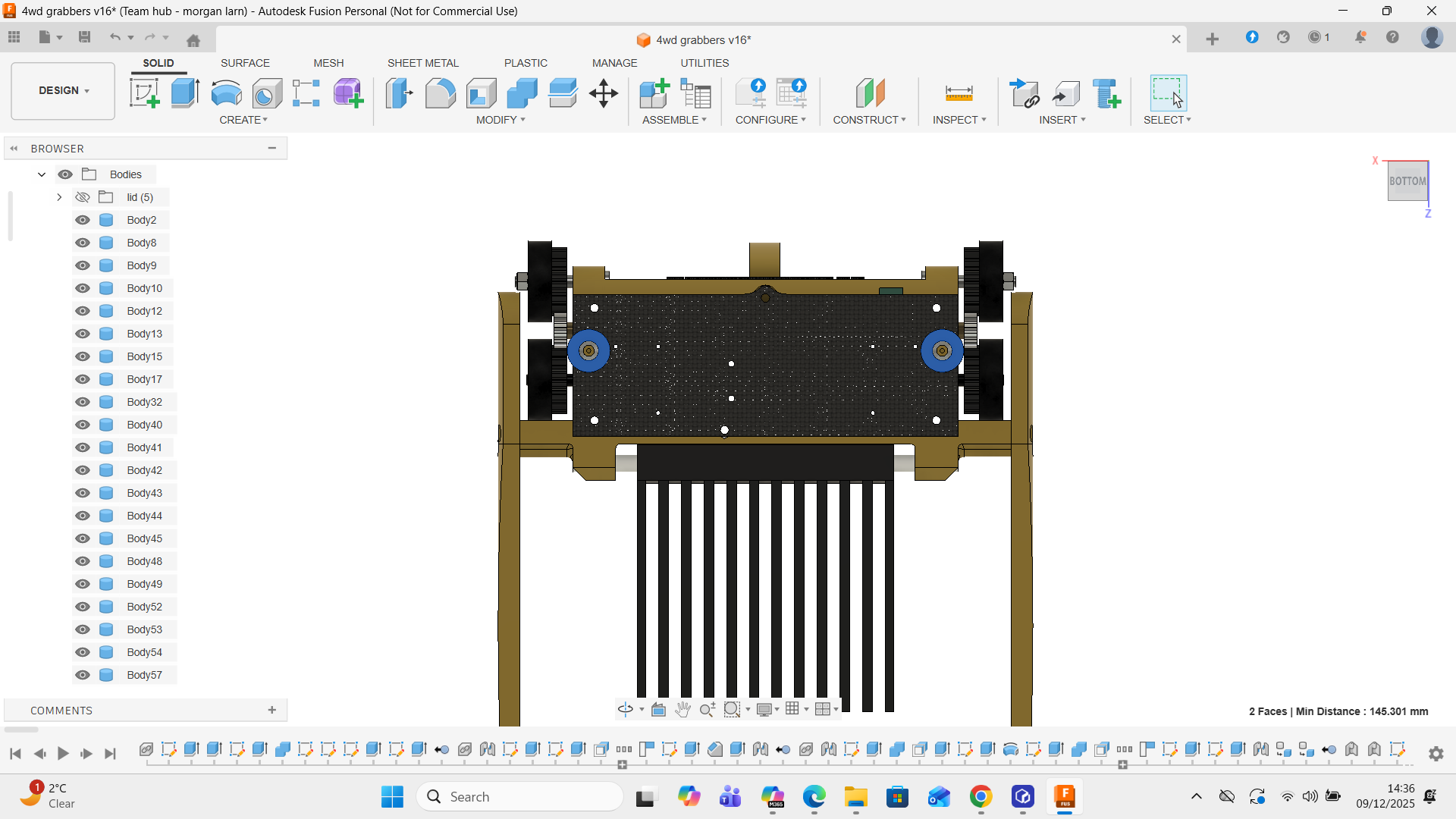
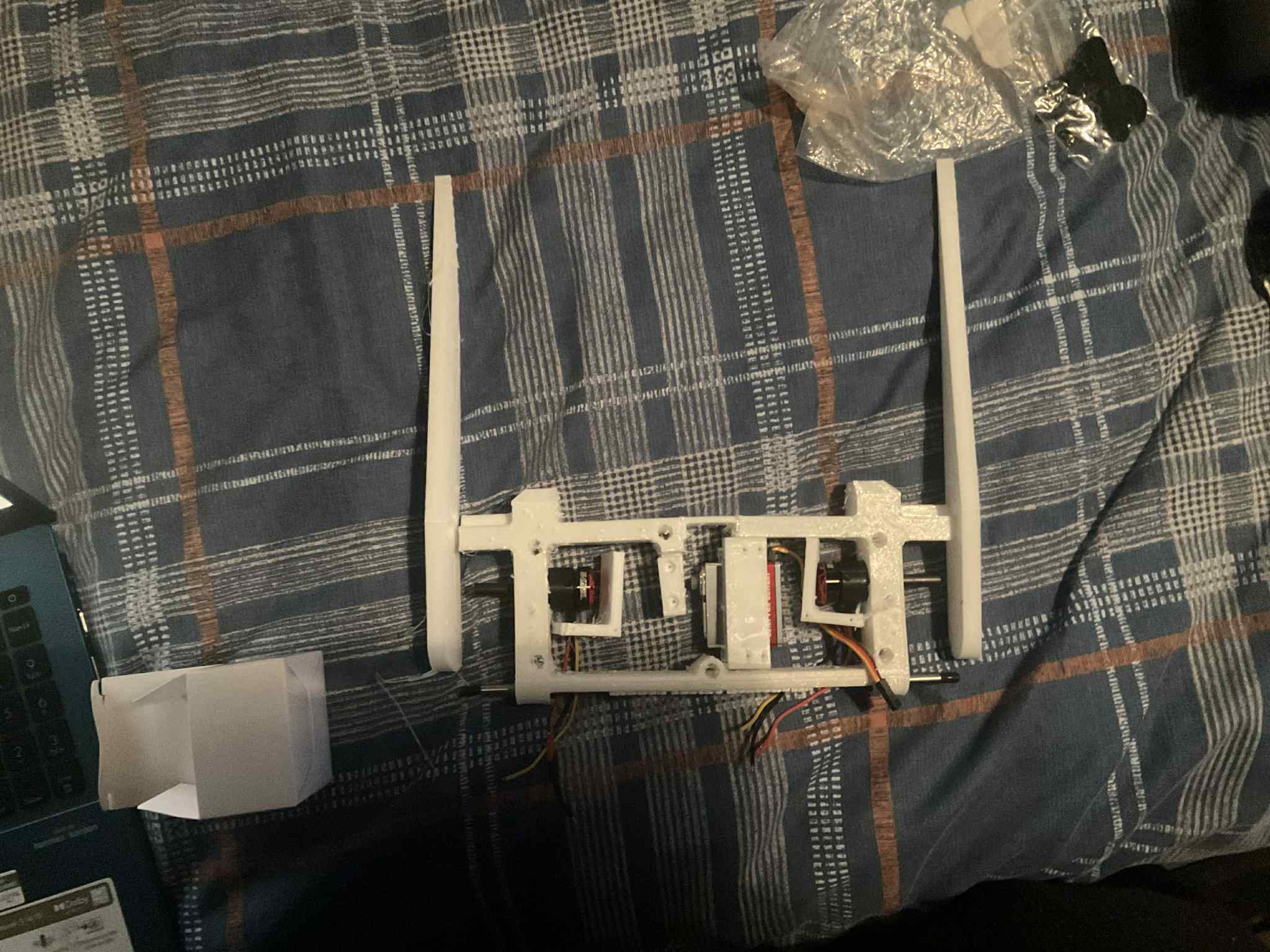
this was built and we hastily did the POM for them however we were worried with the brushed drive and dolos’s horrible forks we would get stuck constantly
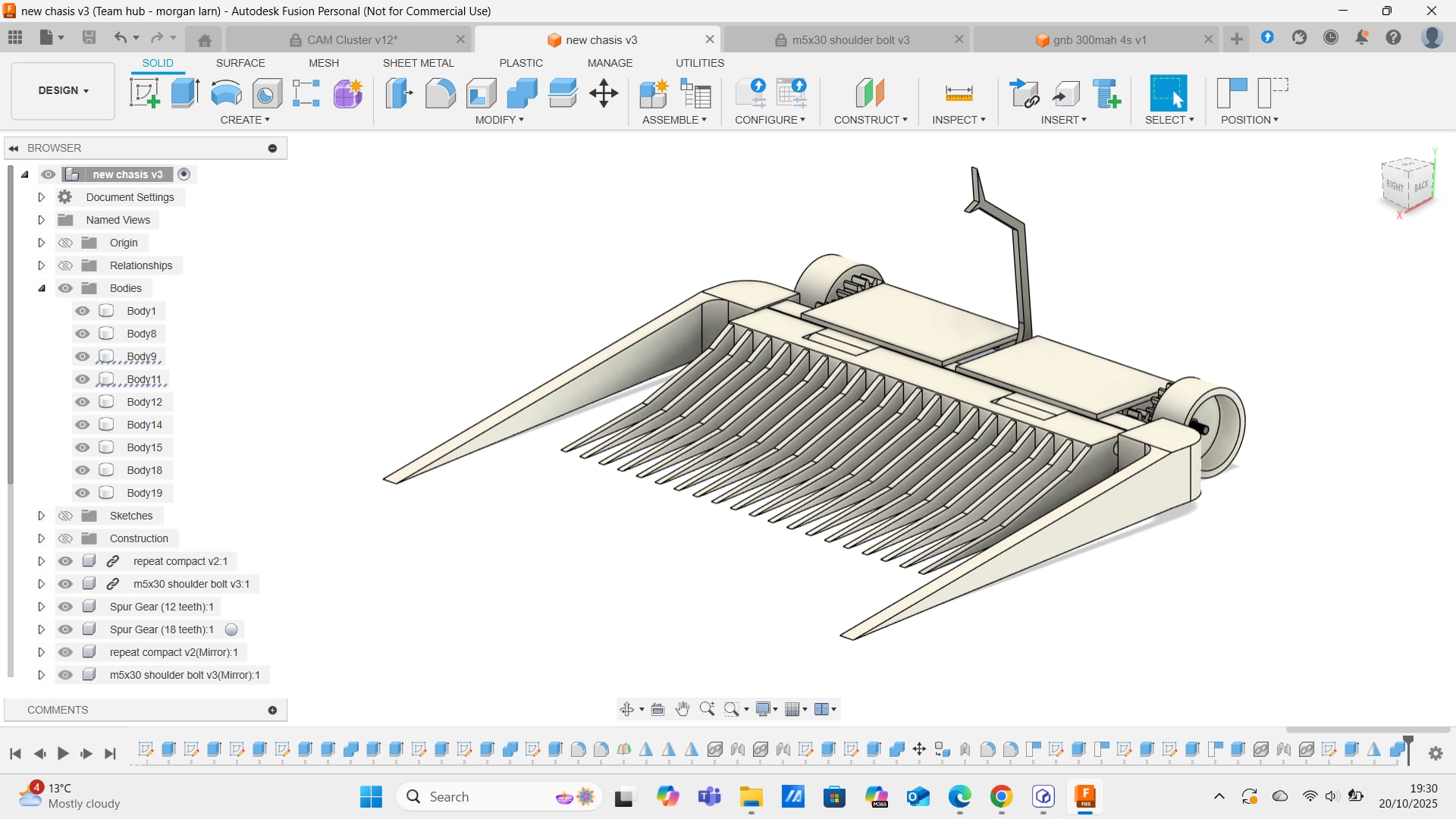
around this time however i was watching some nhrl for some sion action and ended up watching hook em a cluster with tpu forks and a small front lifter which did quite well. this sparked an itch to redesign our clusters to more closely mirror these https://youtu.be/qjYnOyVG54o?si=aUXuEbQFW_V7x3lD
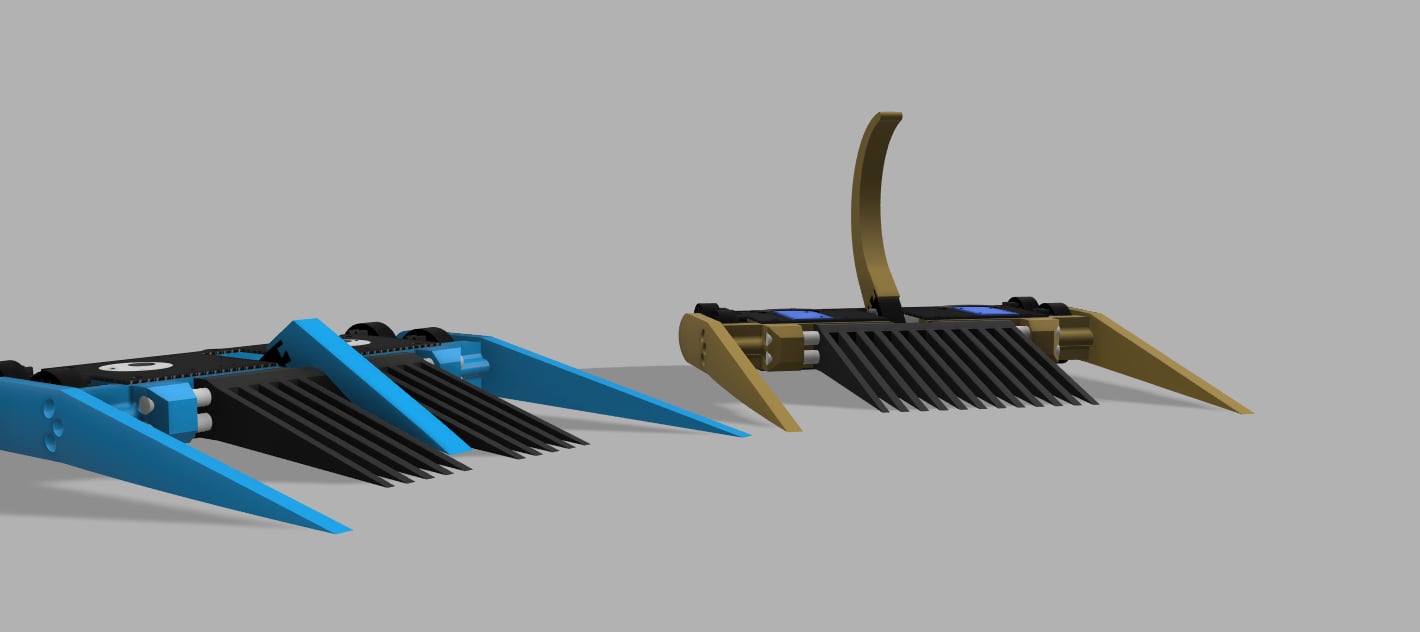
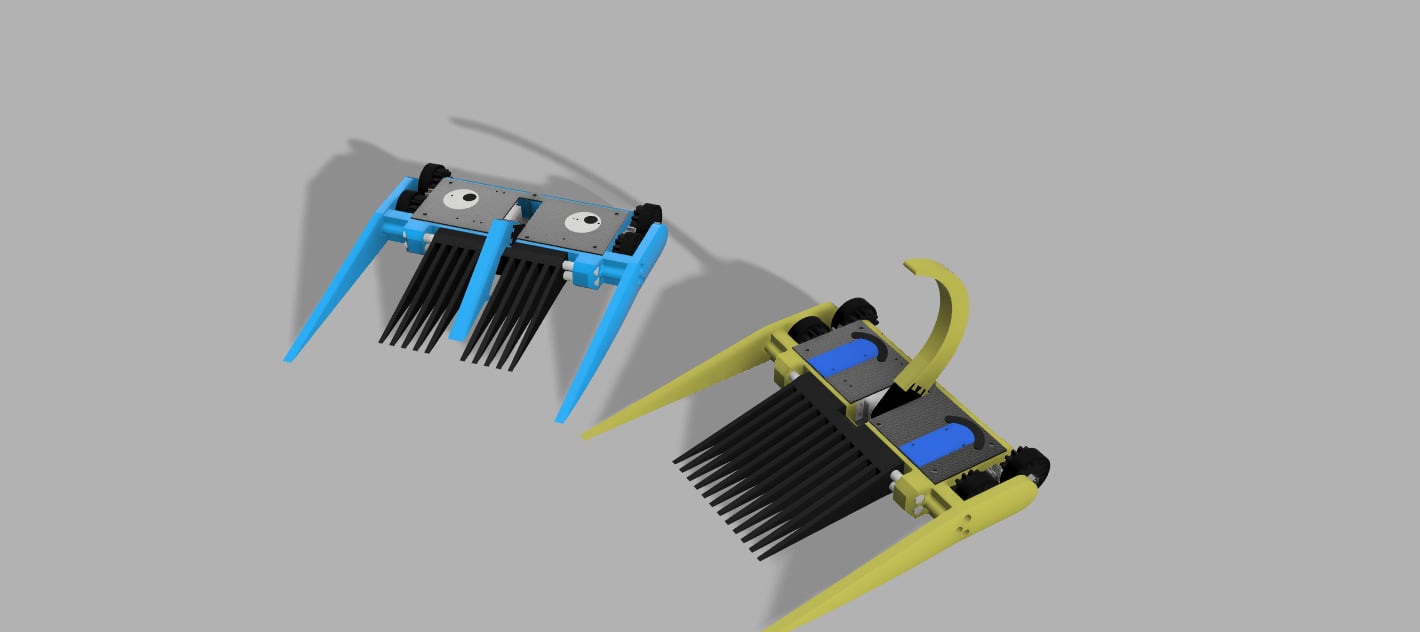
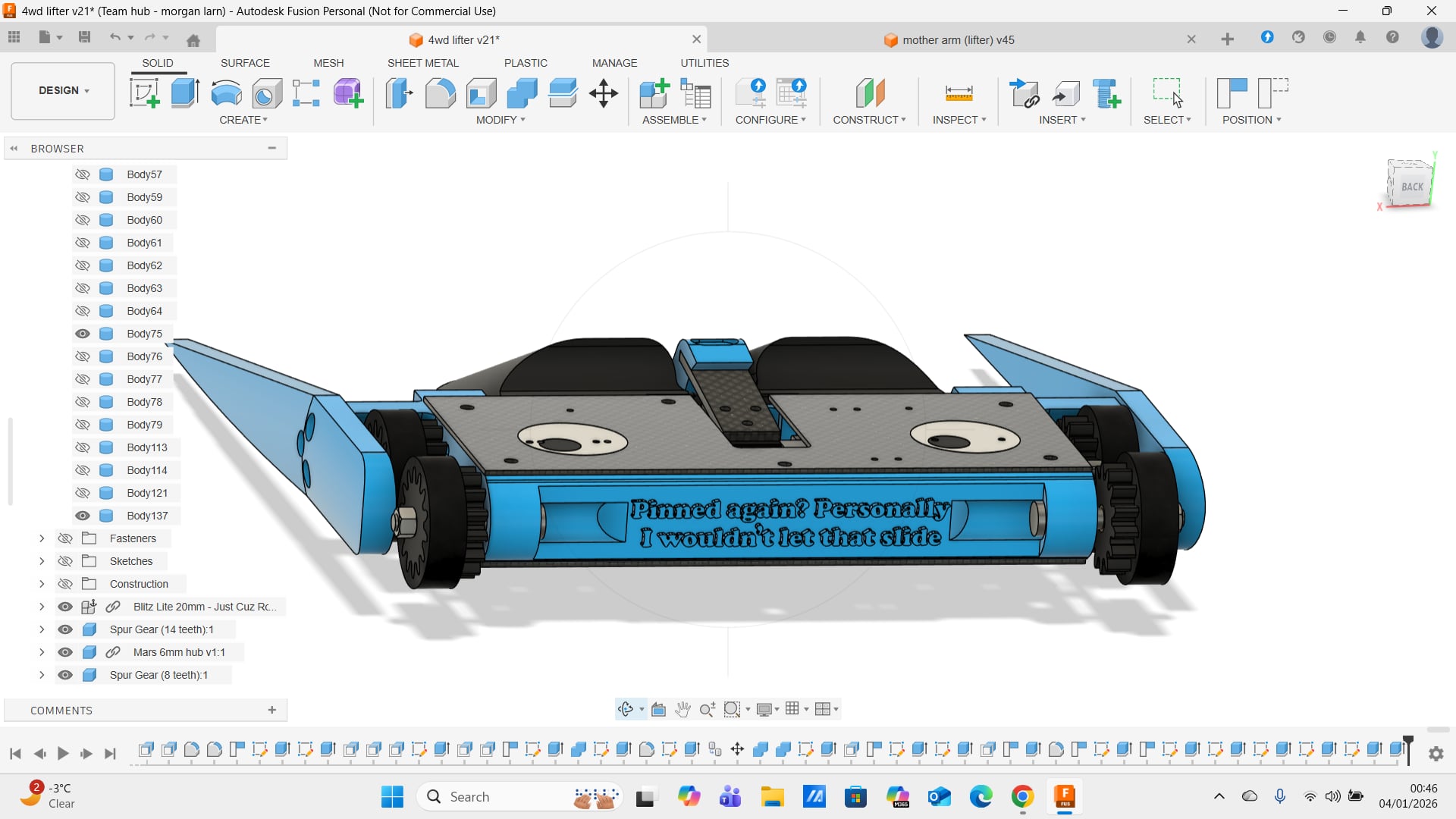
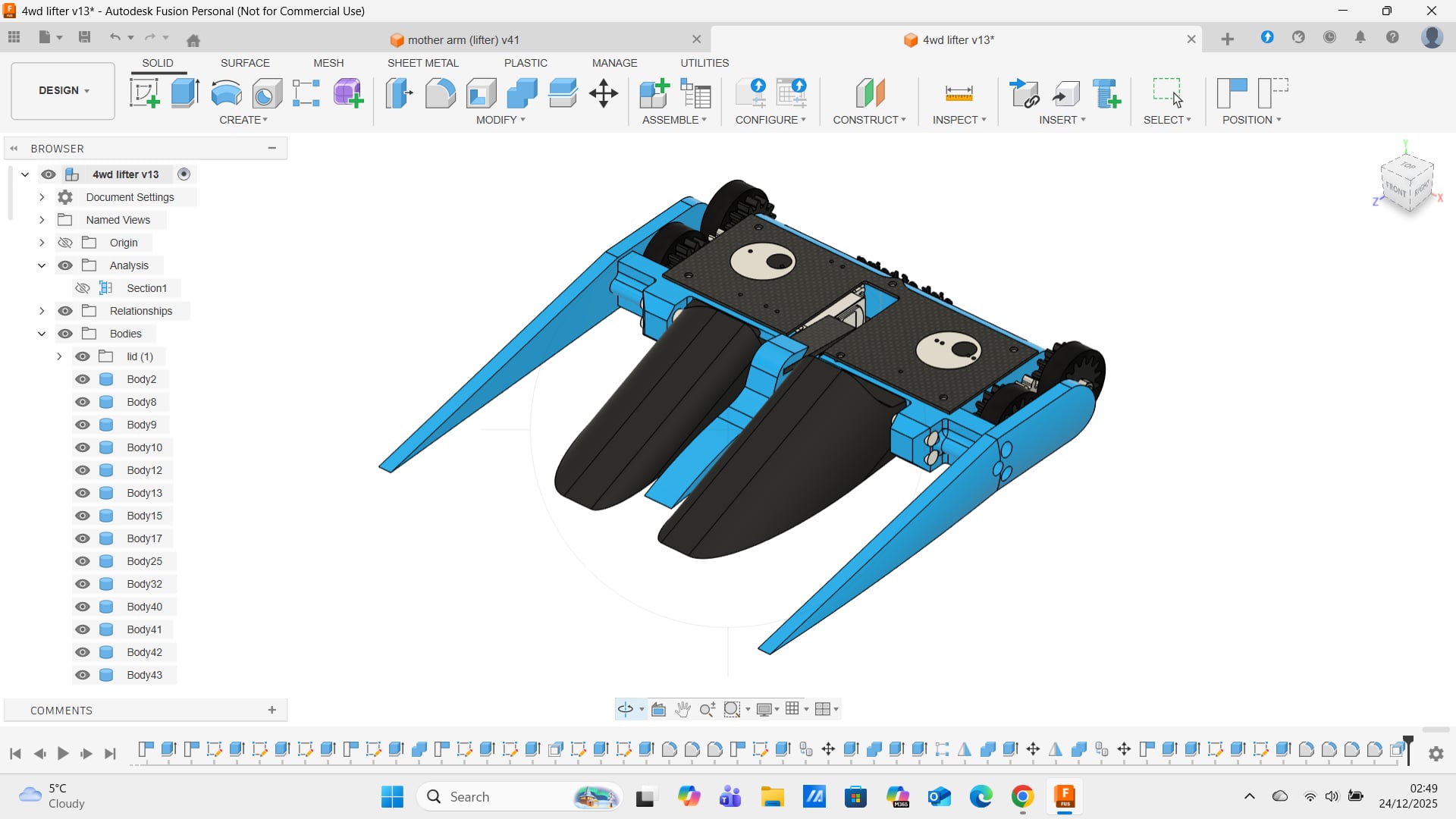
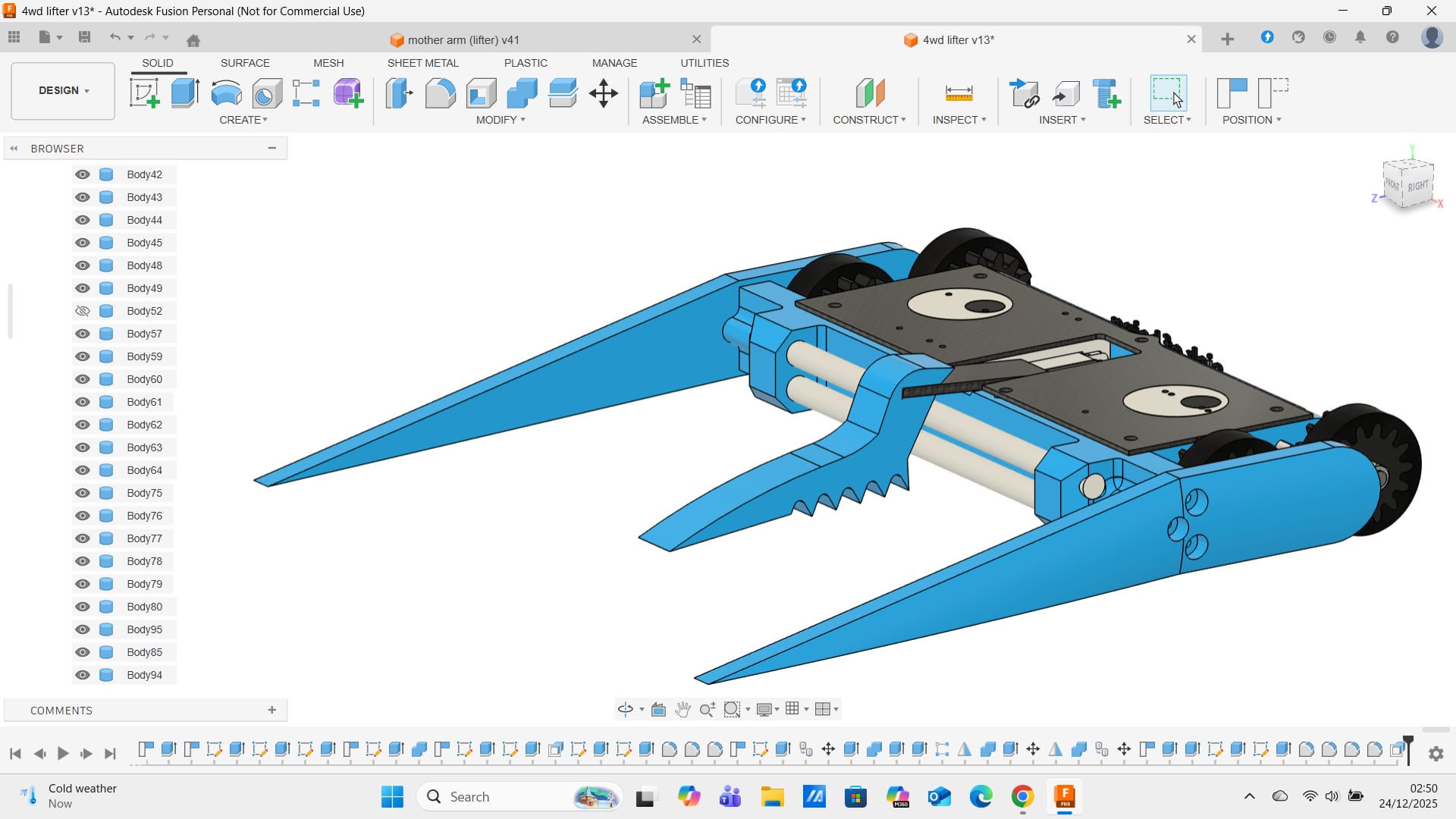
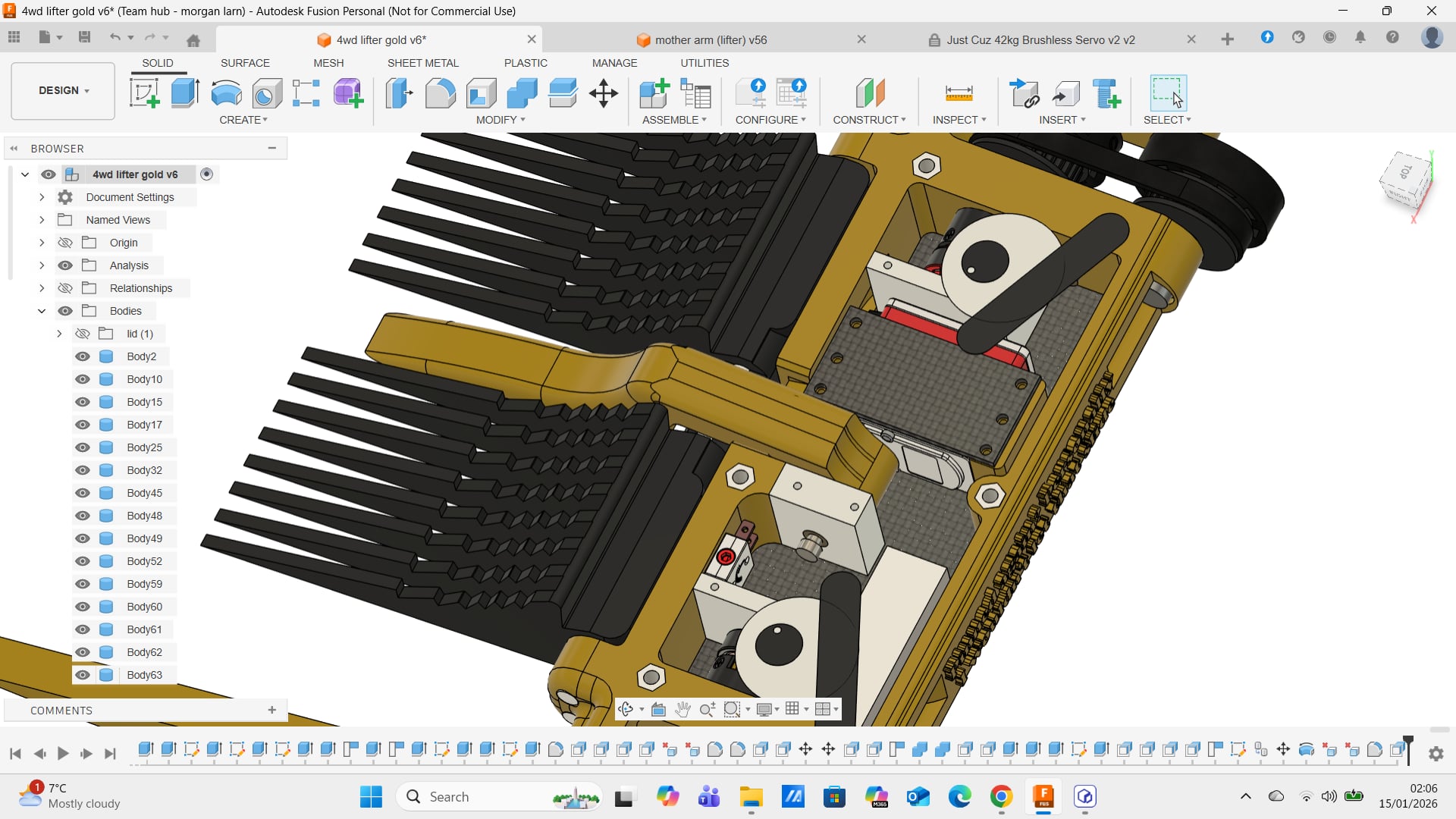
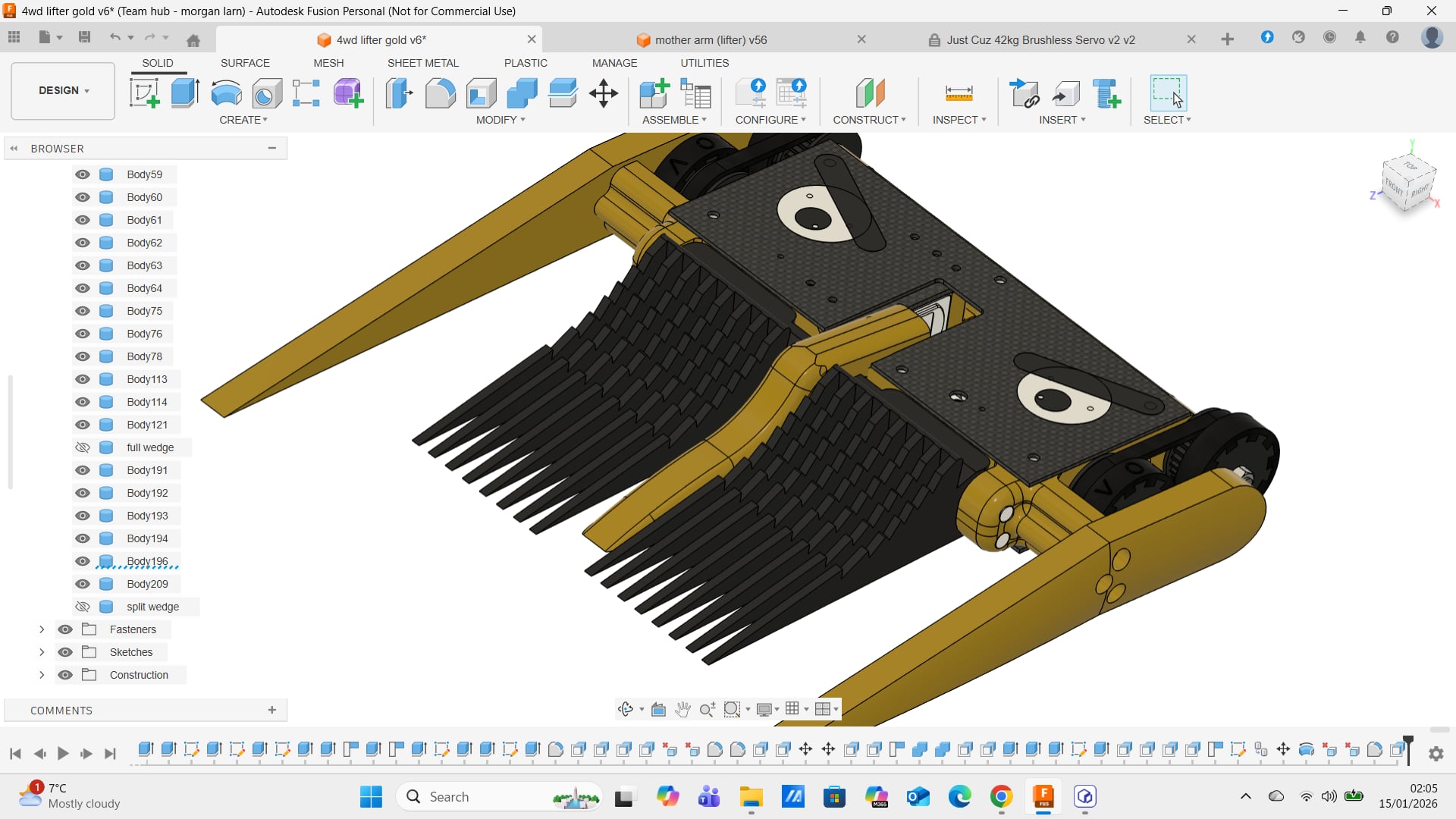
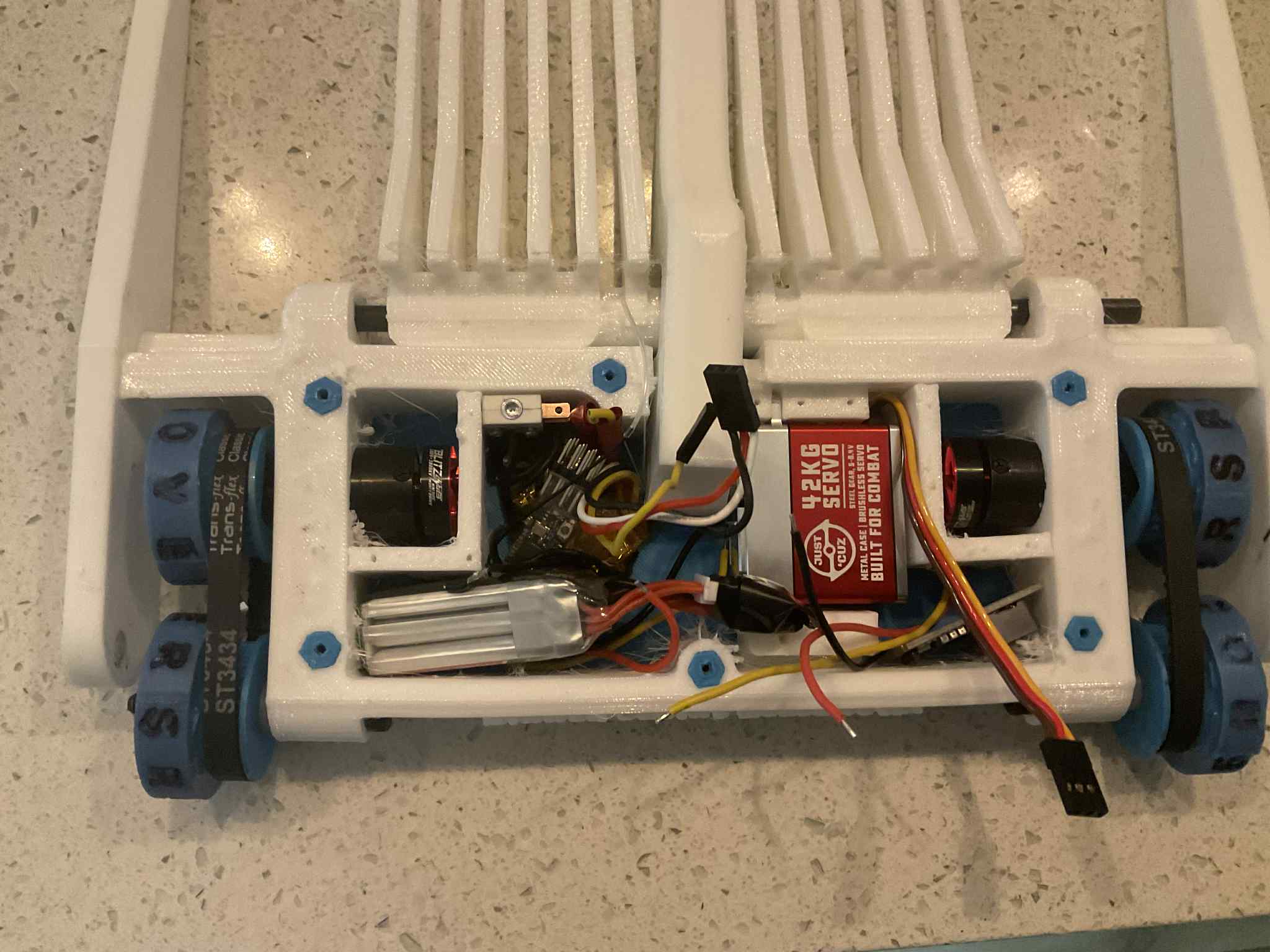
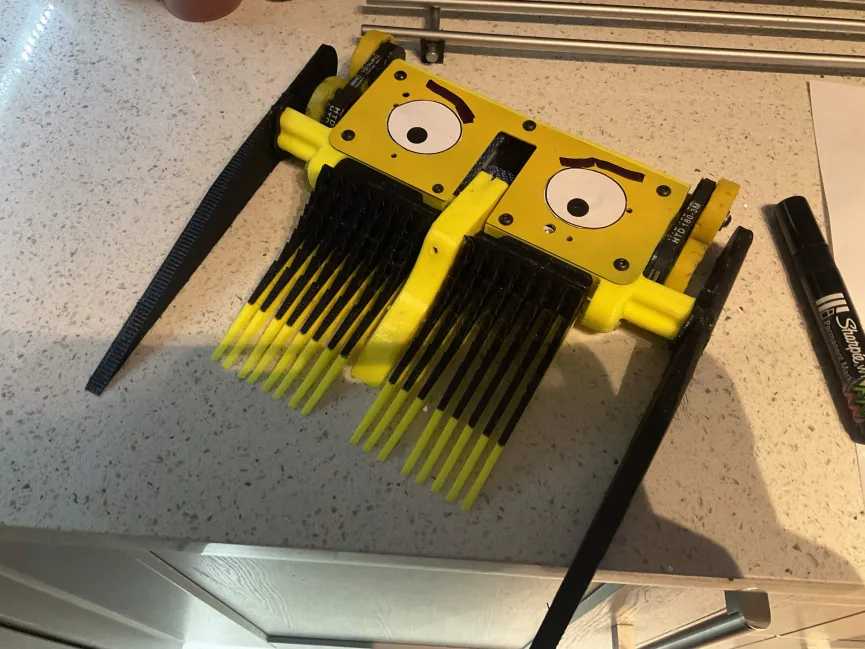
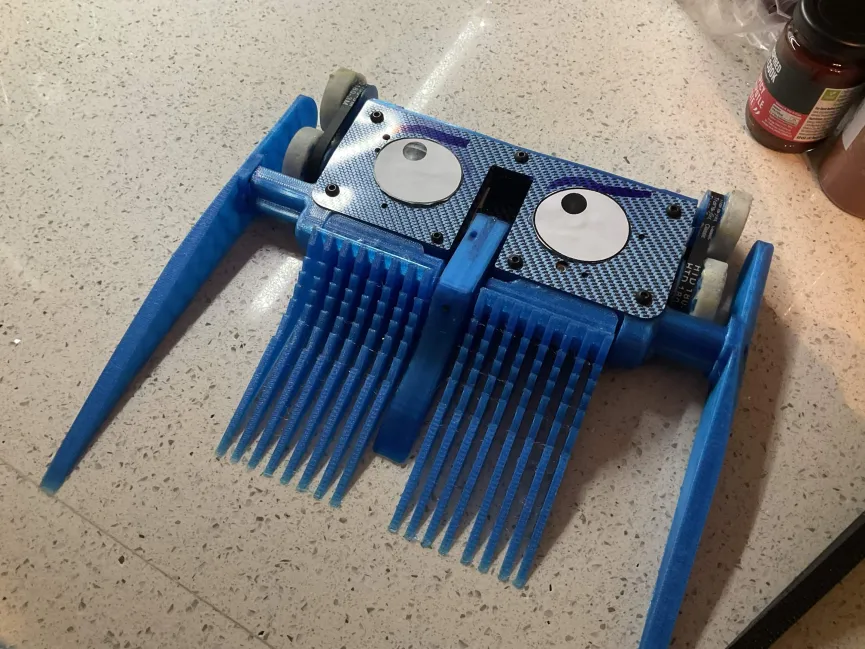
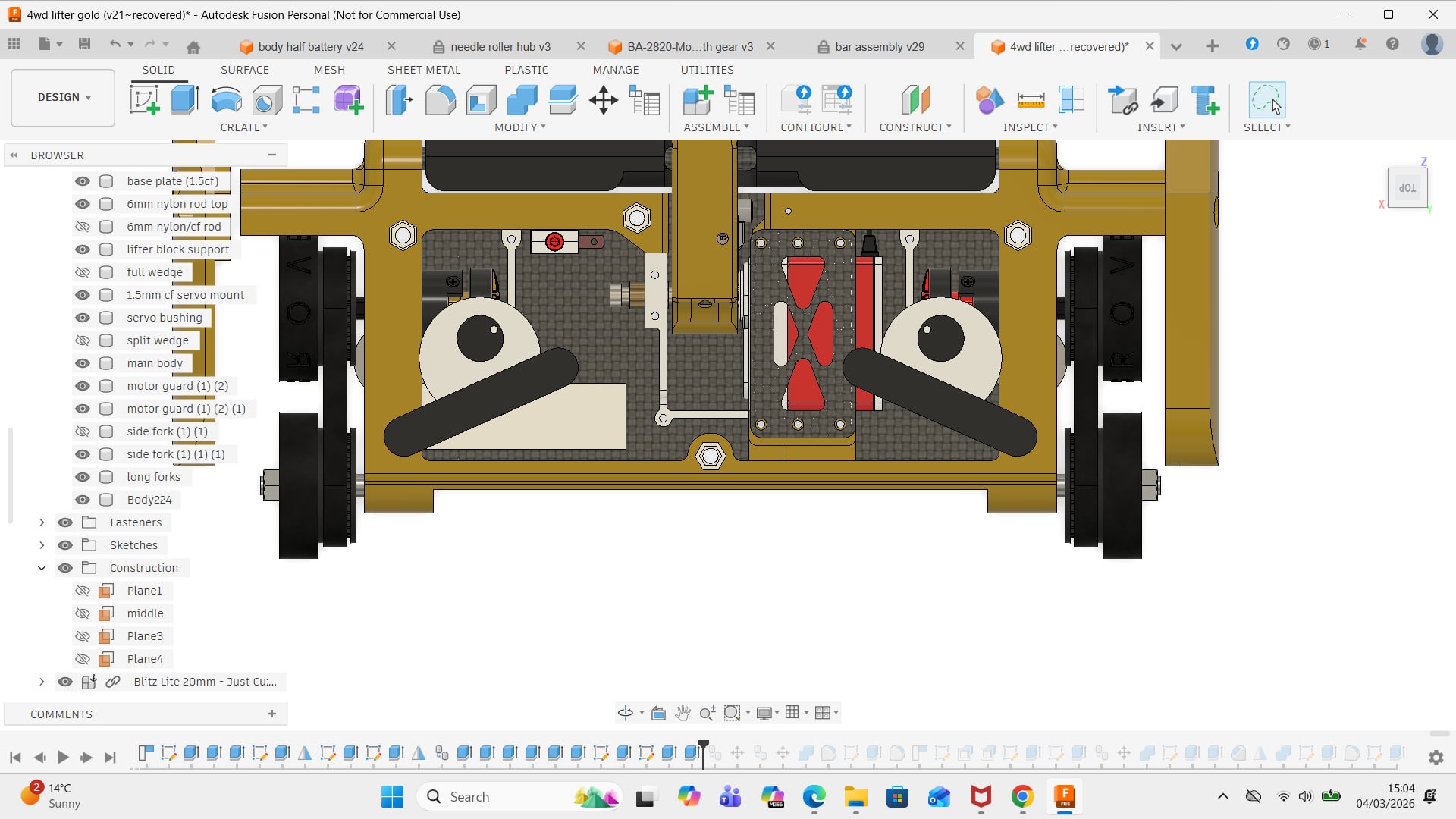
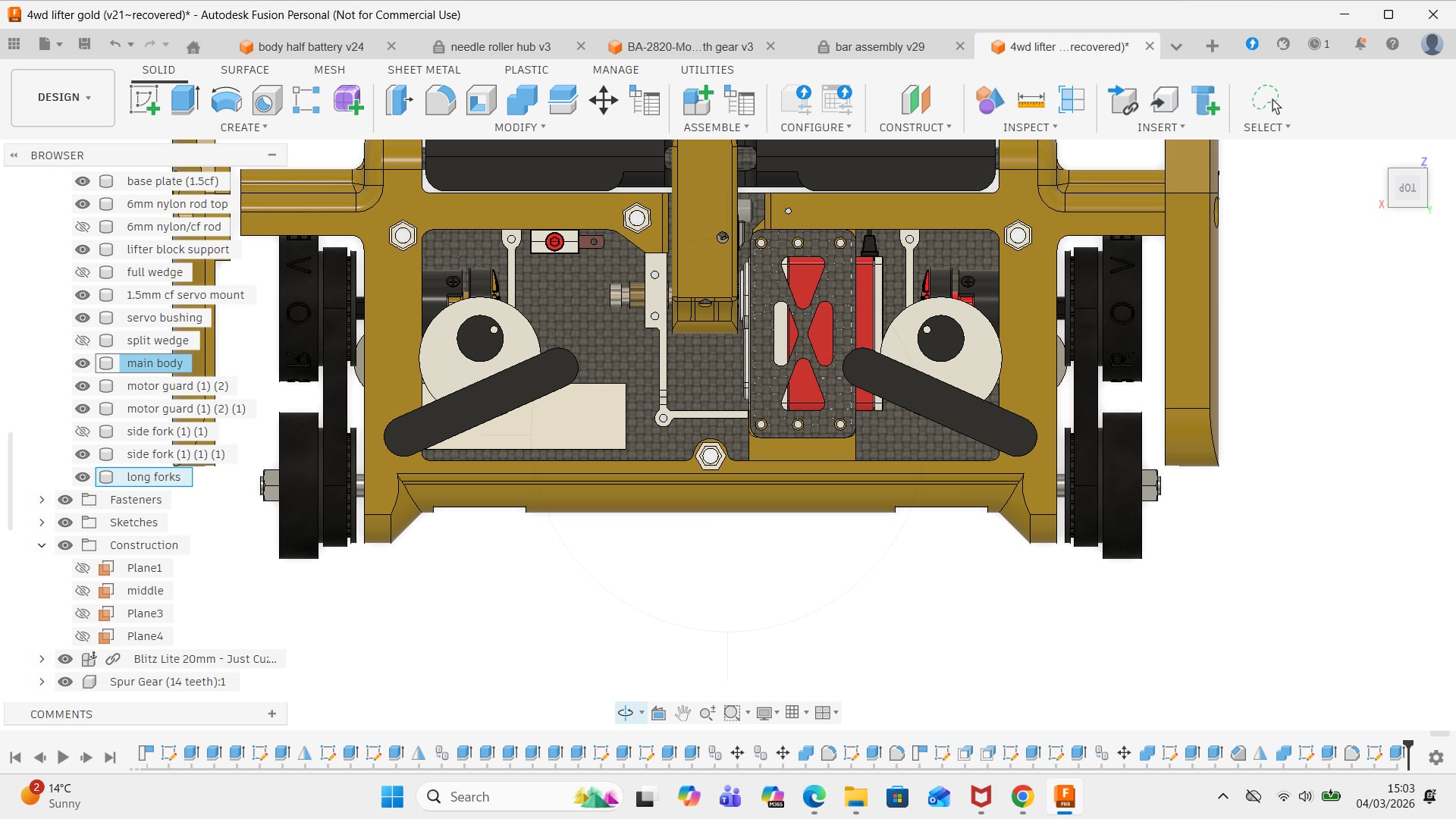
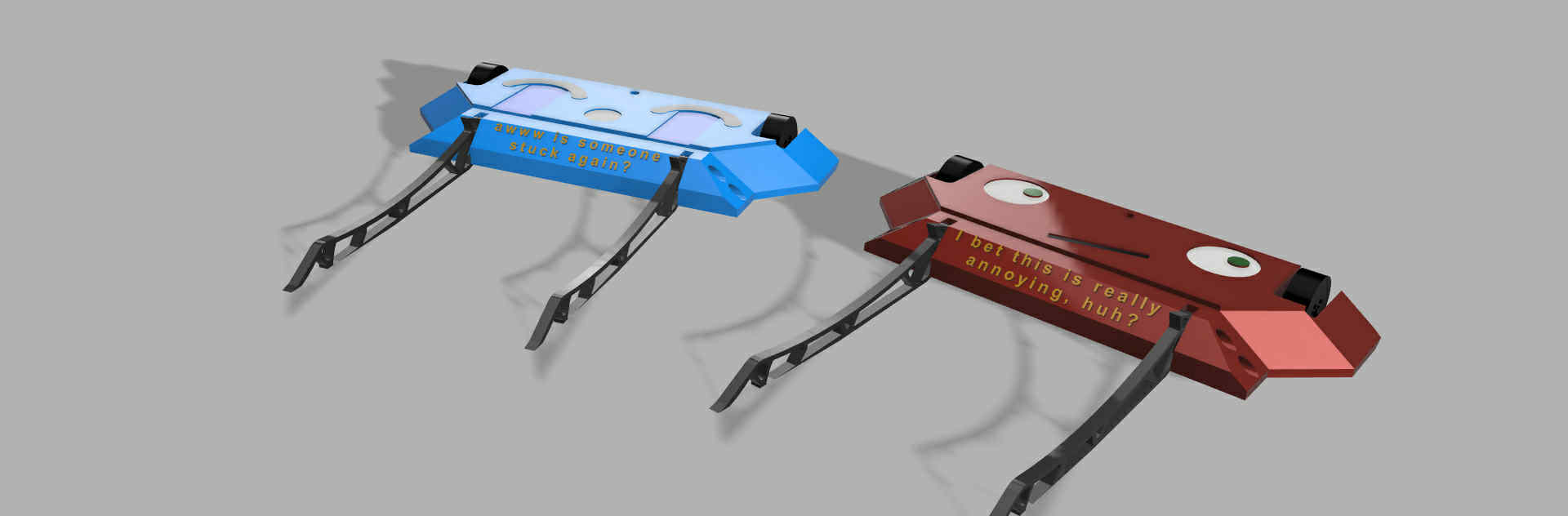
so we came up with this
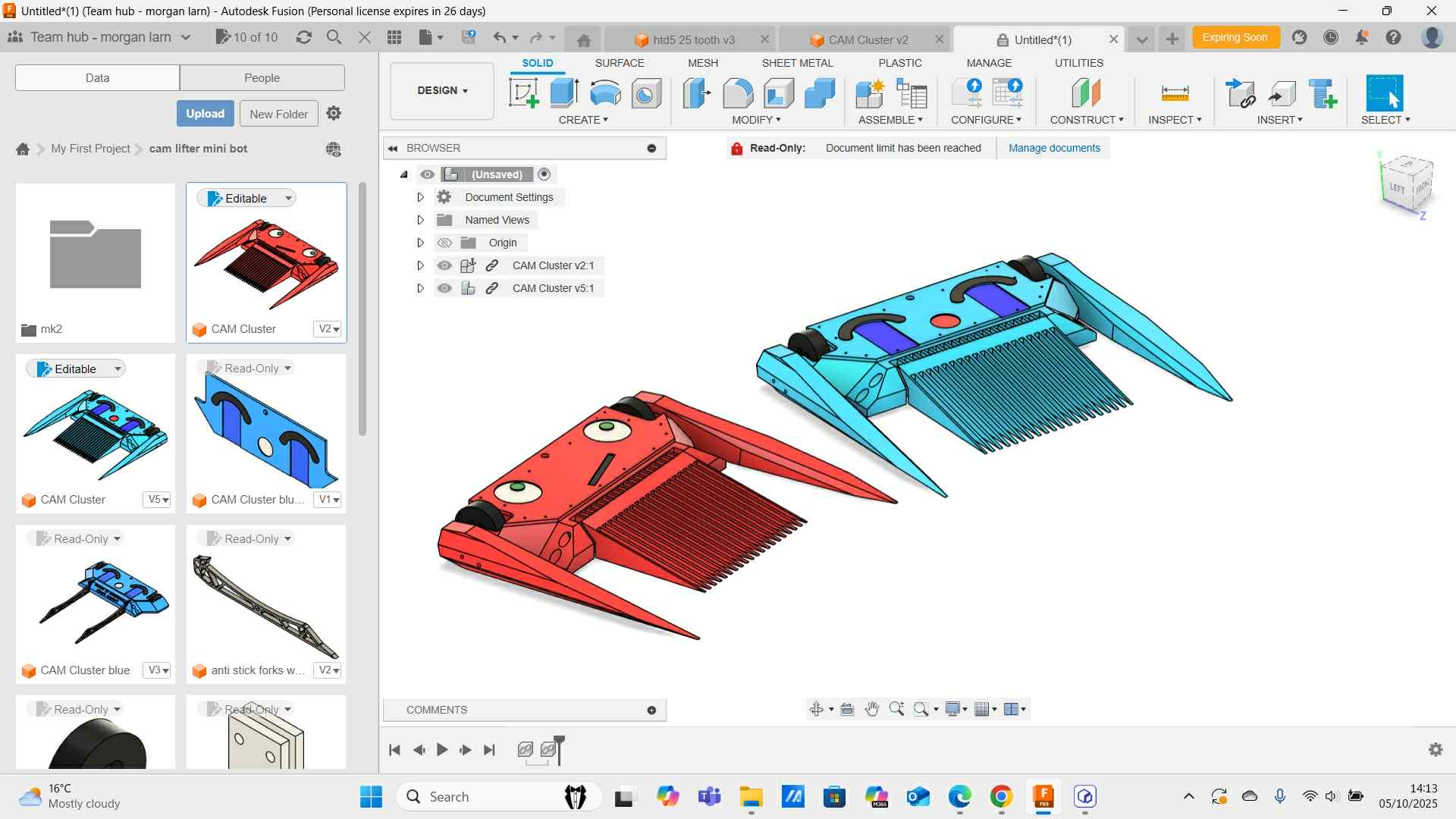
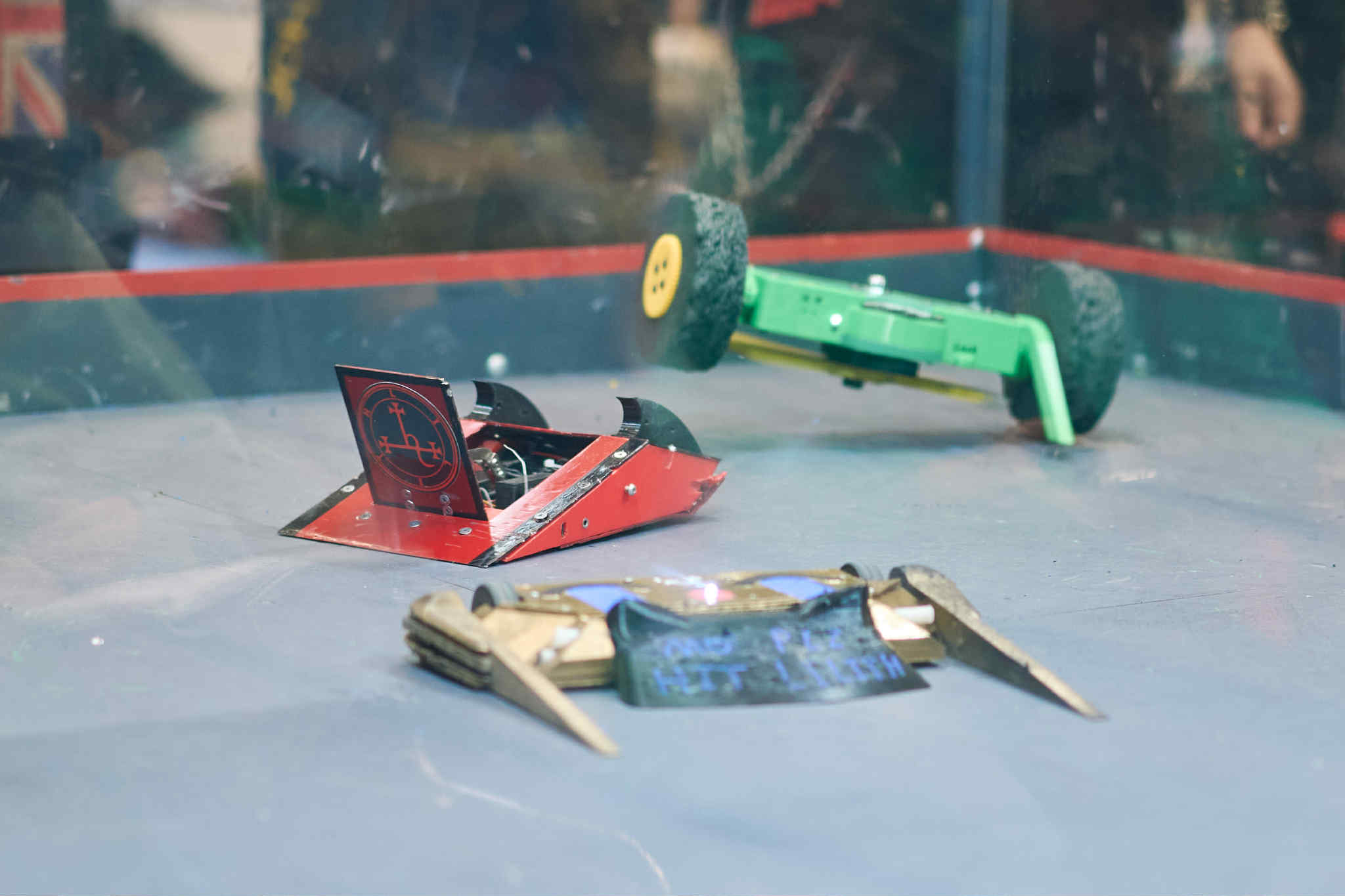
baleen forks to get under verts and large outer forks for corraling smaller bots (each robot is 300mm wide) this fitted our wanting to make them annoying and competitive so we decided to press ahead with these for champs. so a rush build was in order

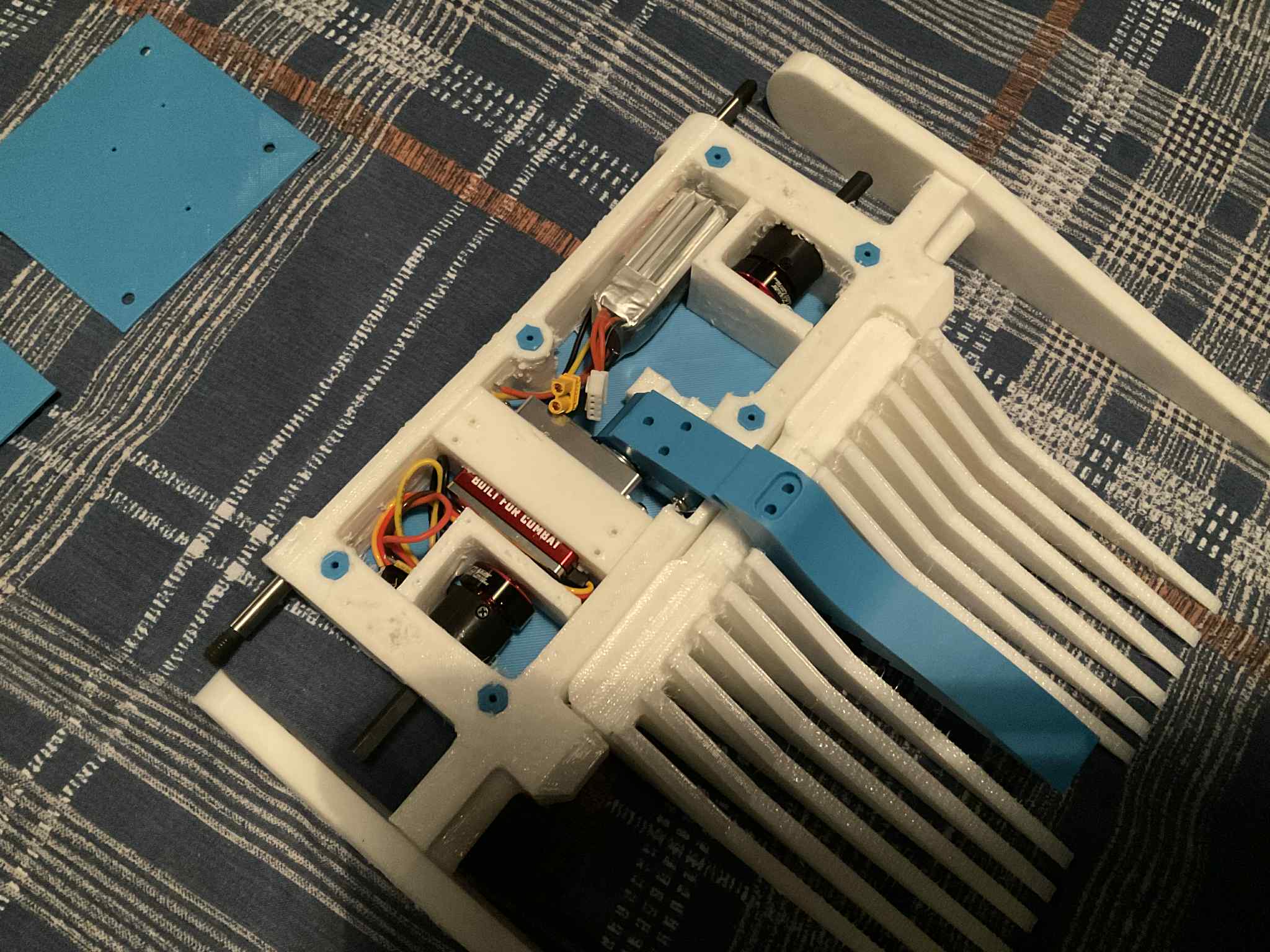
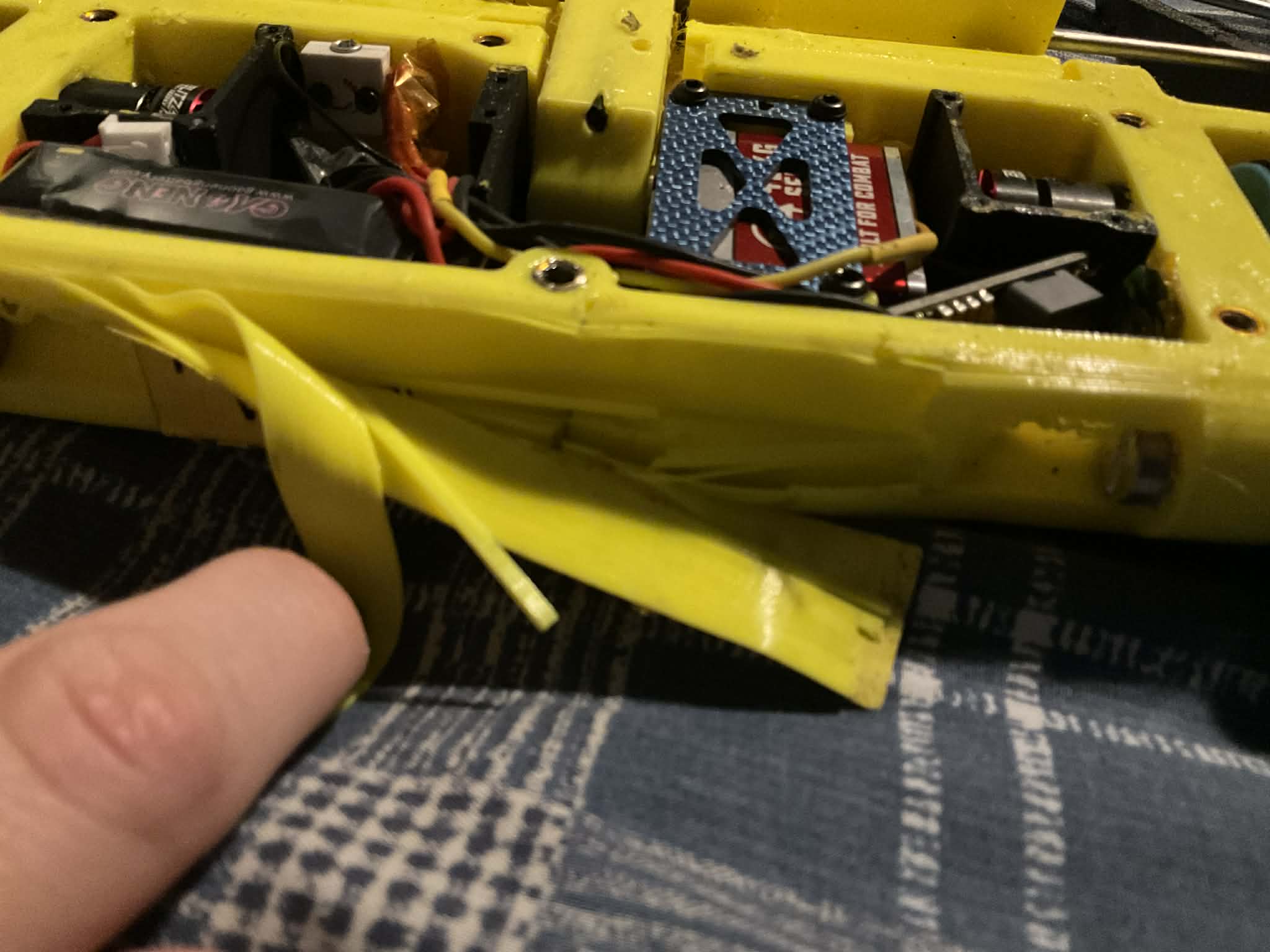
they are powered by repeat compacts with a 4s 450mah battery (could of been much smaller) and some lego bbb wheels from the store which gave excellent traction. they also use the same fork mounting system dolos uses with 8mm hdpe rods
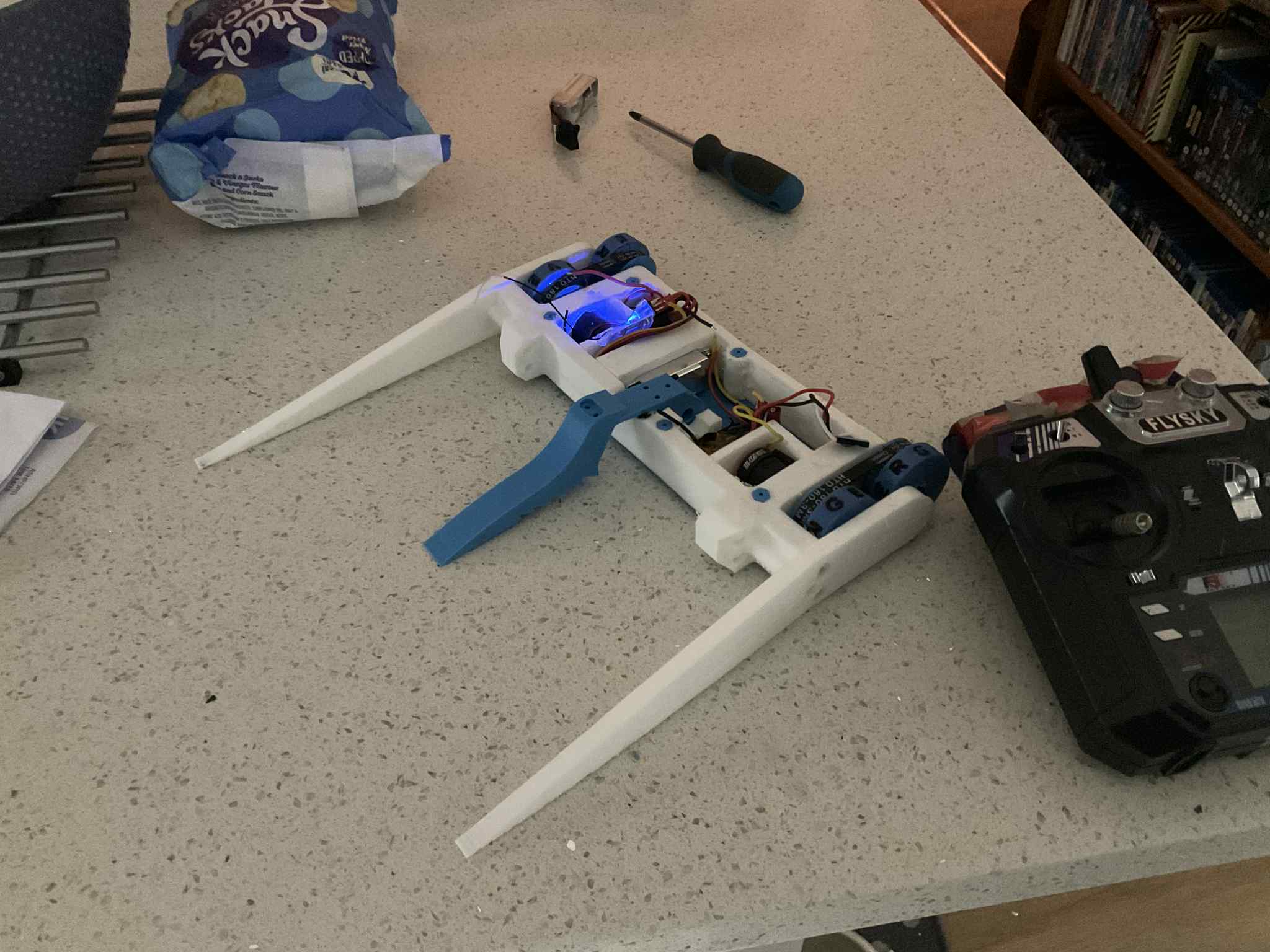
around this time we messed with a few configs
a wedge for horizontals (which was printed way too thin irl)
an anti mo/hammer saw config. was redeisgned to have some forks facing down too so act like a trap. didnt end up printing it due to not thinking it could actually print. plus i was fast running out of tpu
and finally a really dumb wajoo config. a 2mm sheet of cf which in theory would let us get under and shove them around
we also messed with some magnets

these were about 2mm off the floor so on the real versions we went for the magnets 4mm off the floor with spacers if we wanted more traction
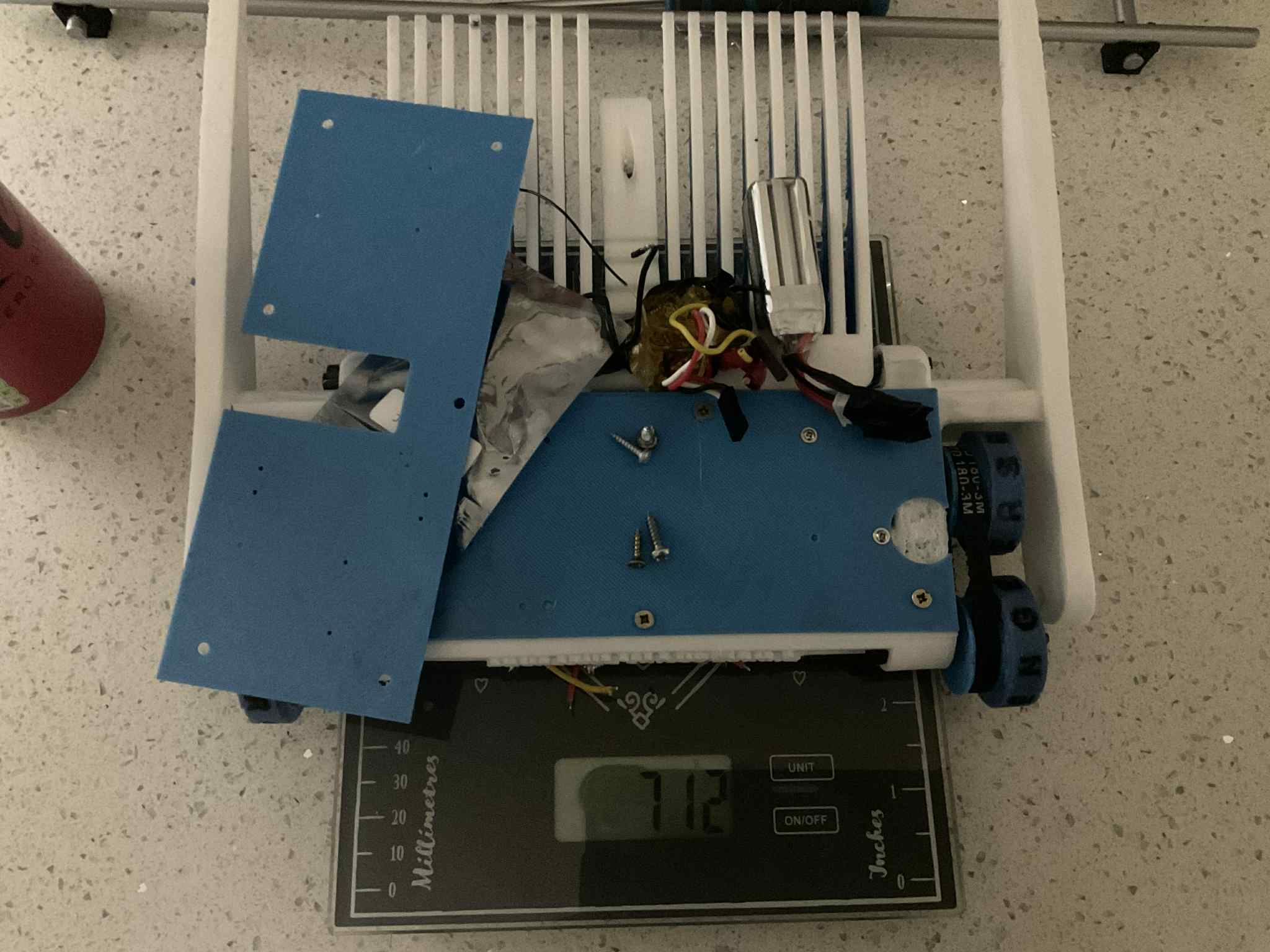
i also made some 3mm ali top plates just in case we draw anything overhead
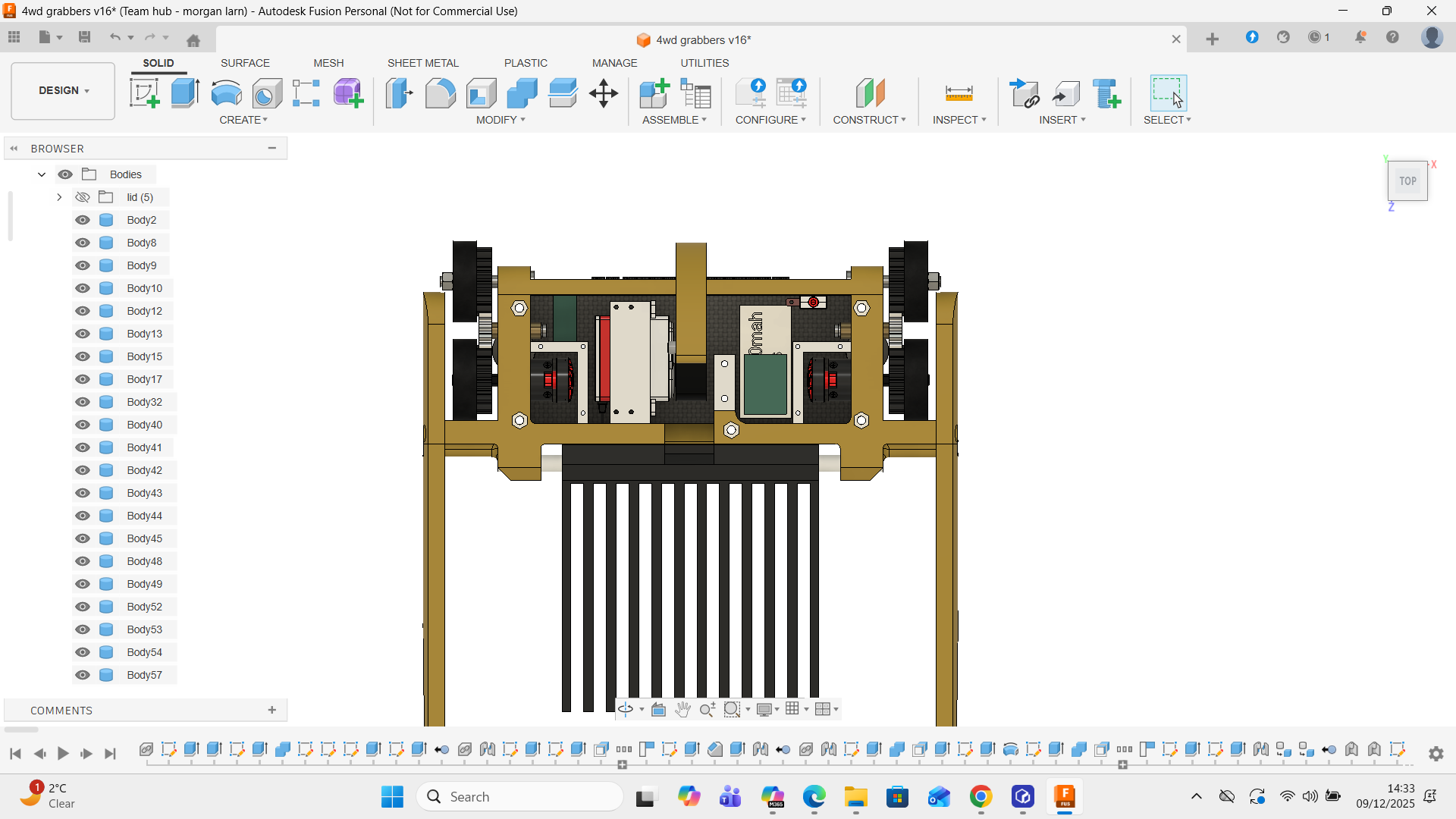
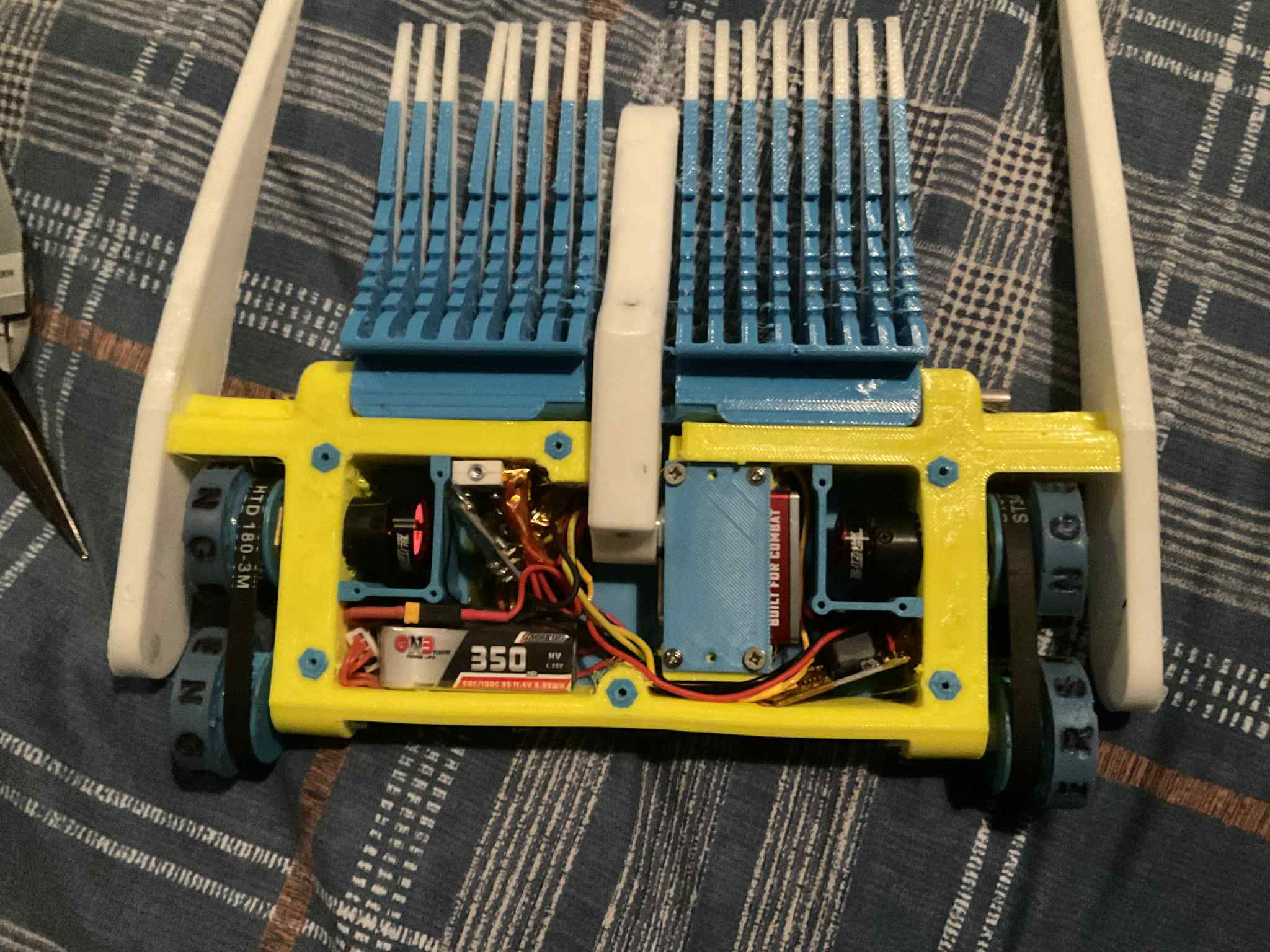
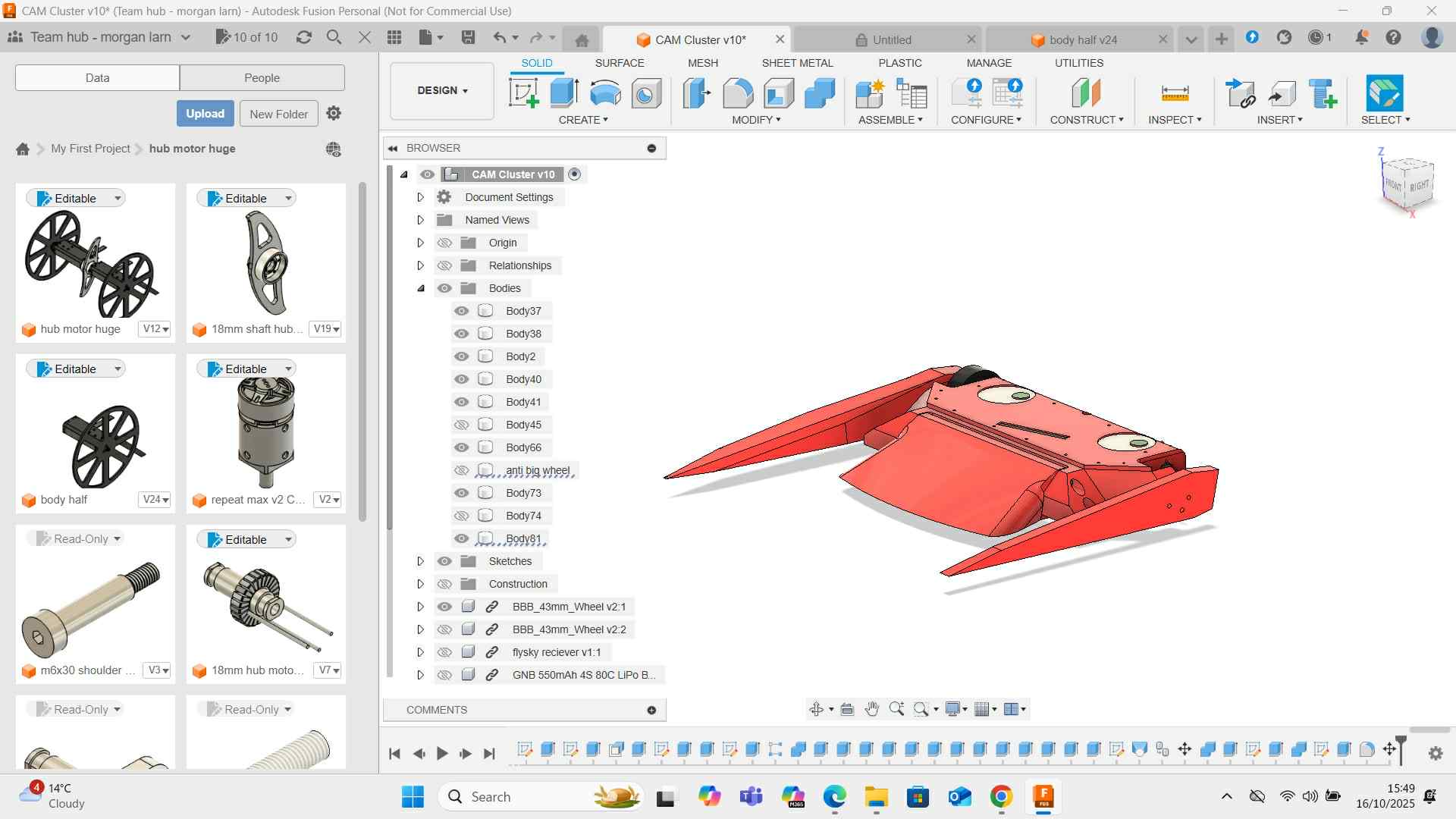
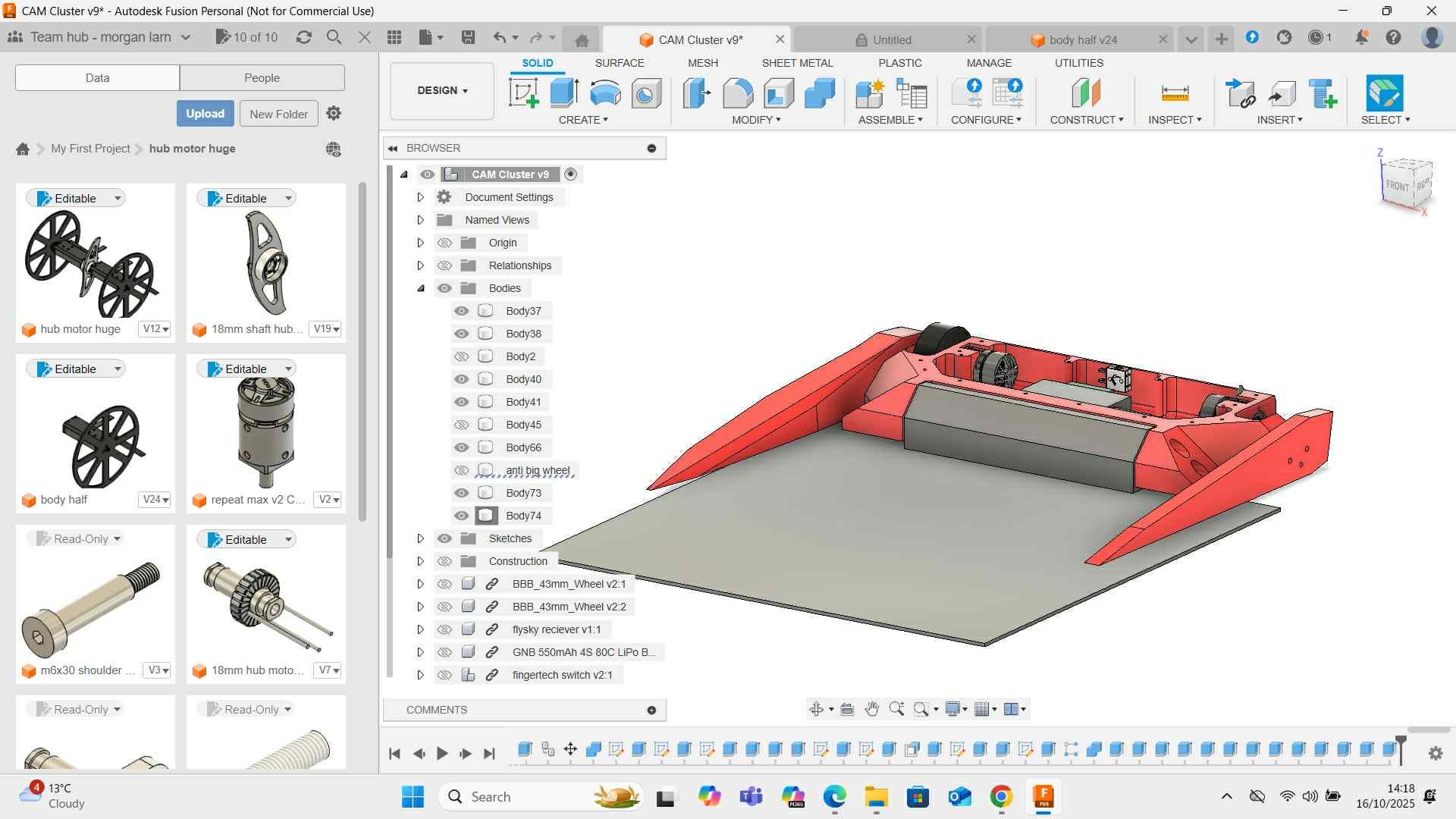
however with my printer running low on filament and time also running short (like 1 week away from the comp) it was time to build the second bot
this came together much faster as you would expect and i made sure to print it a bit lighter just incase we had weight issues
am i glad i printed them lighter haha. just 1 gram in it the night before the comp

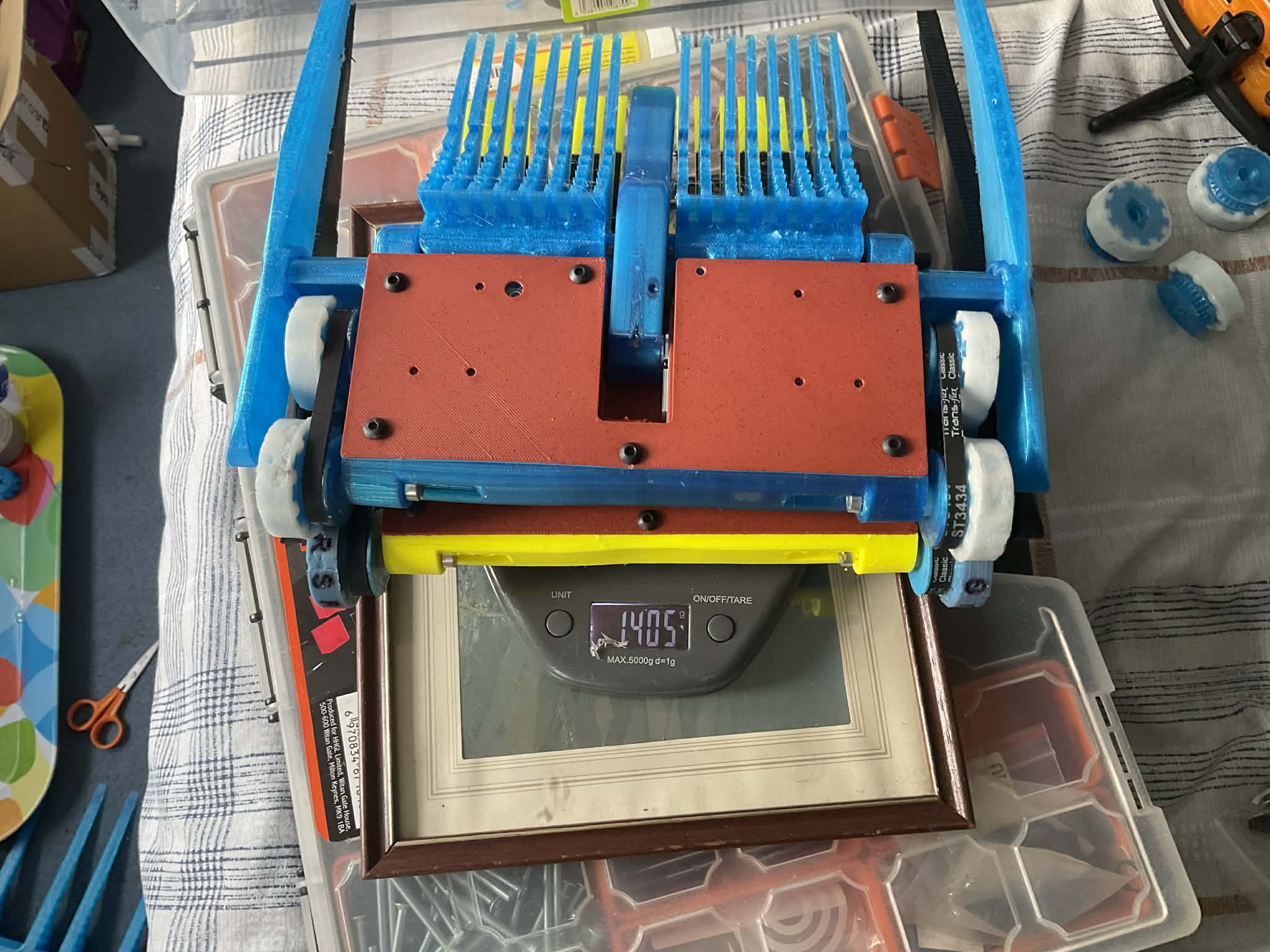
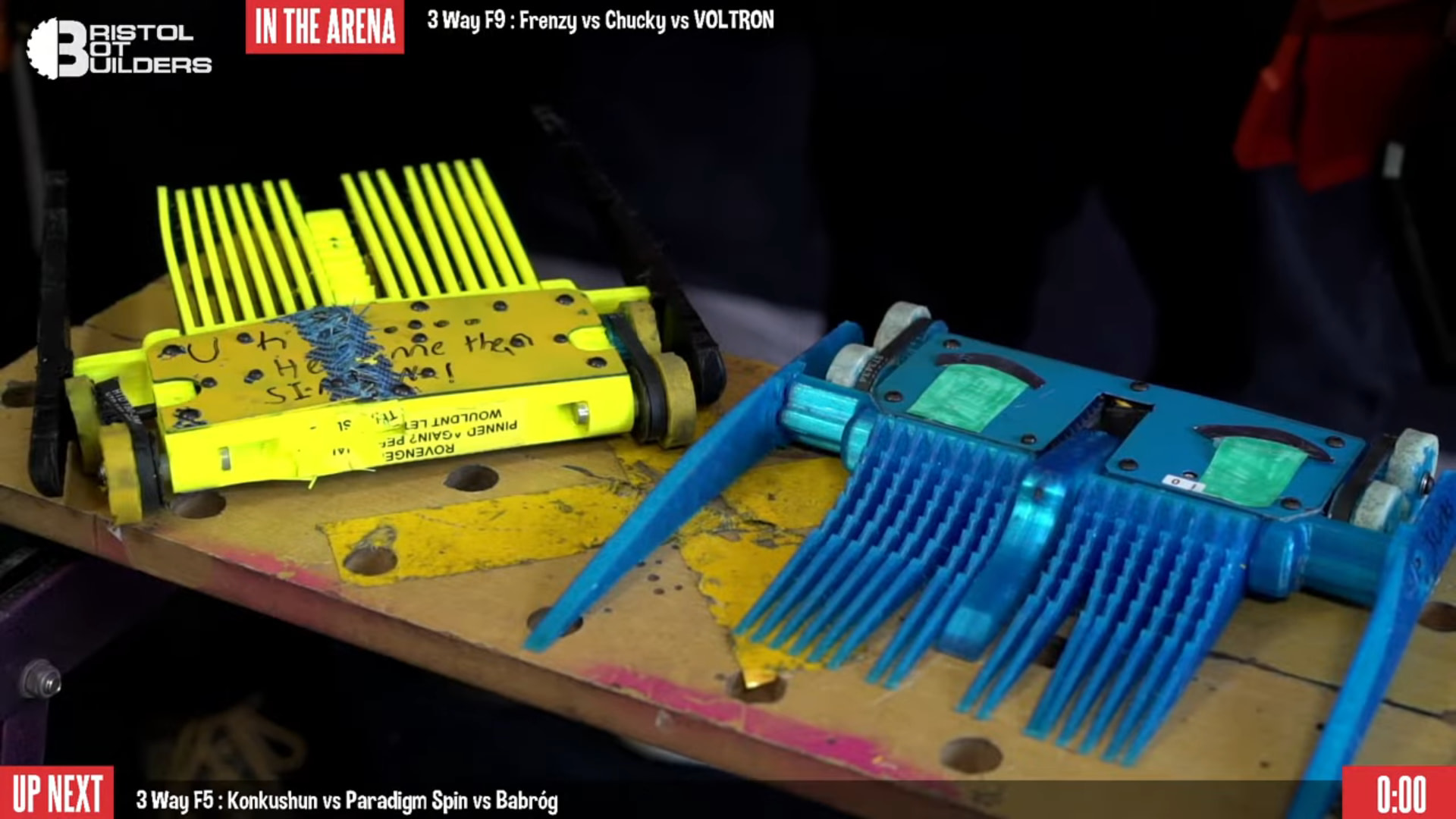
took a final glory shot before hand and we were good to go.
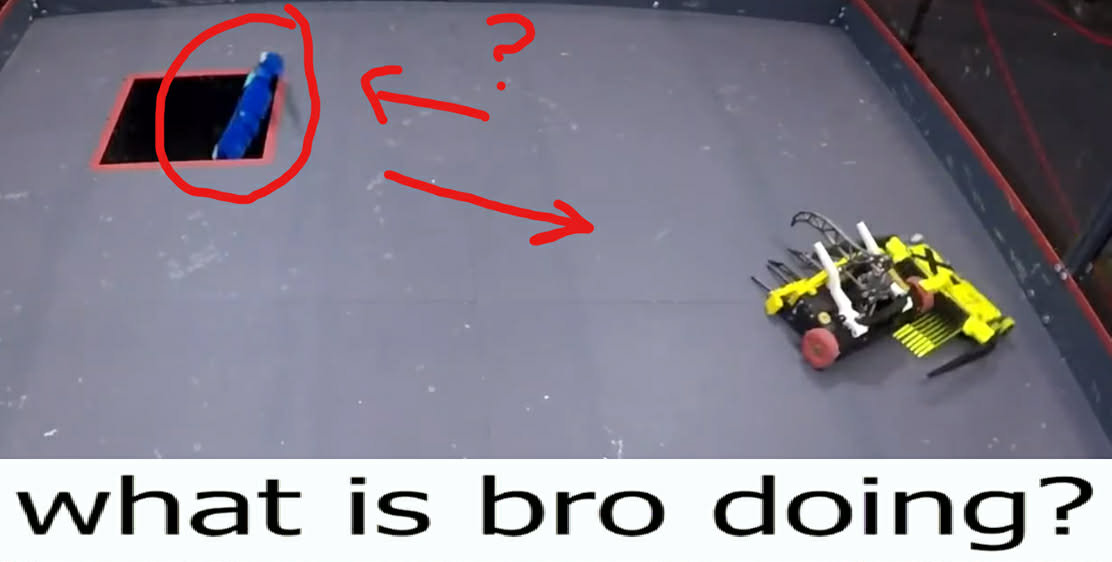
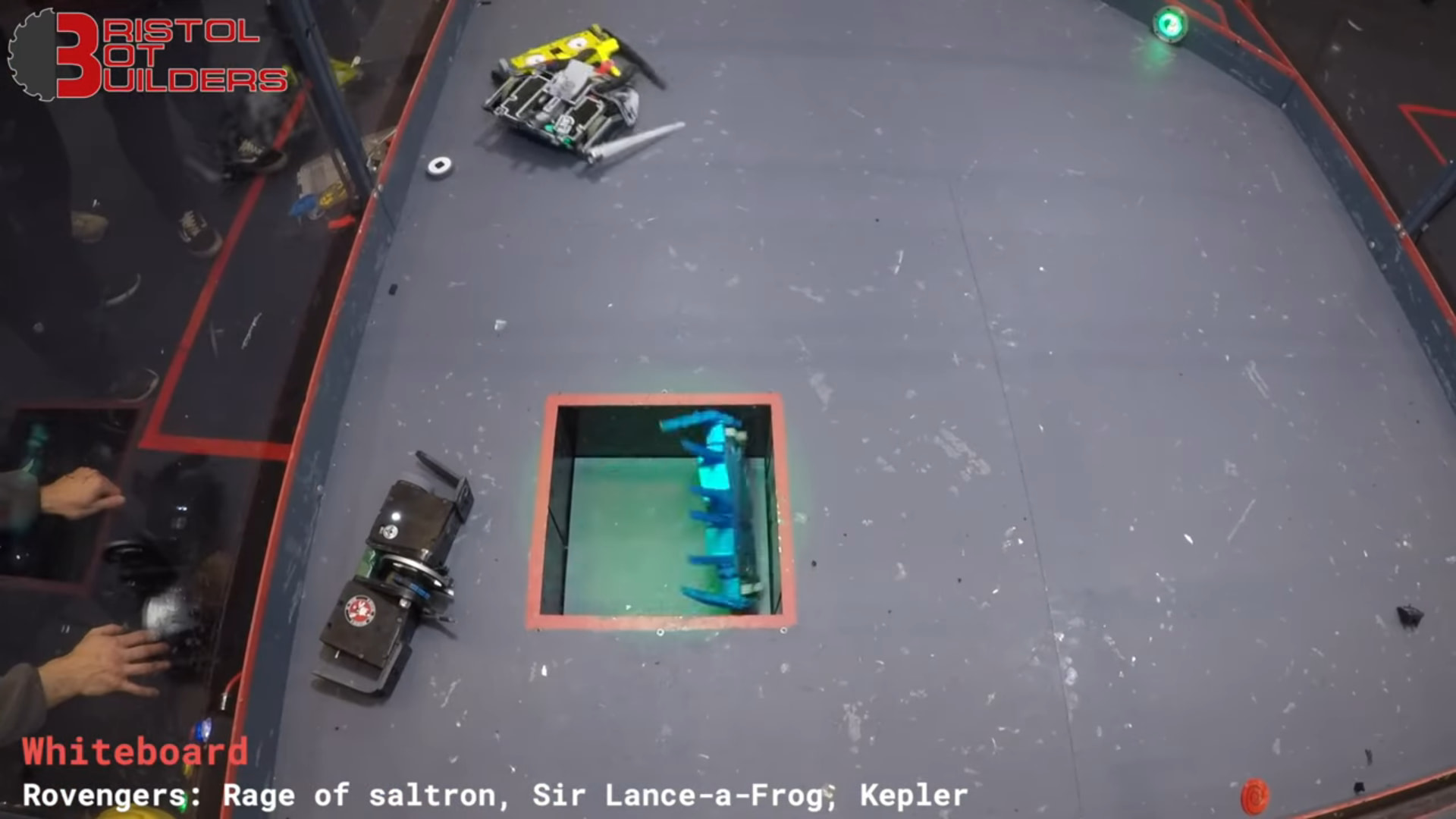
all we wanted was a top 16 finish so between both our driving and my design “expertise” for the ground game we prayed for a kind draw and to not bring them back in a bin bag. we had 4 bots we really really didnt want to fight. that being mo-problems, swoop, wajoo and chopstick