Hello everyone. I totally did not forget that this forum exists and that I’ve signed up for it a while ago.
I thought I’d share some pictures of my bot Ryu-Kishin. That bot that showed up to the beetlechamps in 2022 that got knocked out by Icebreaker in round 1 and didn’t redeem itself against a very boring bot.
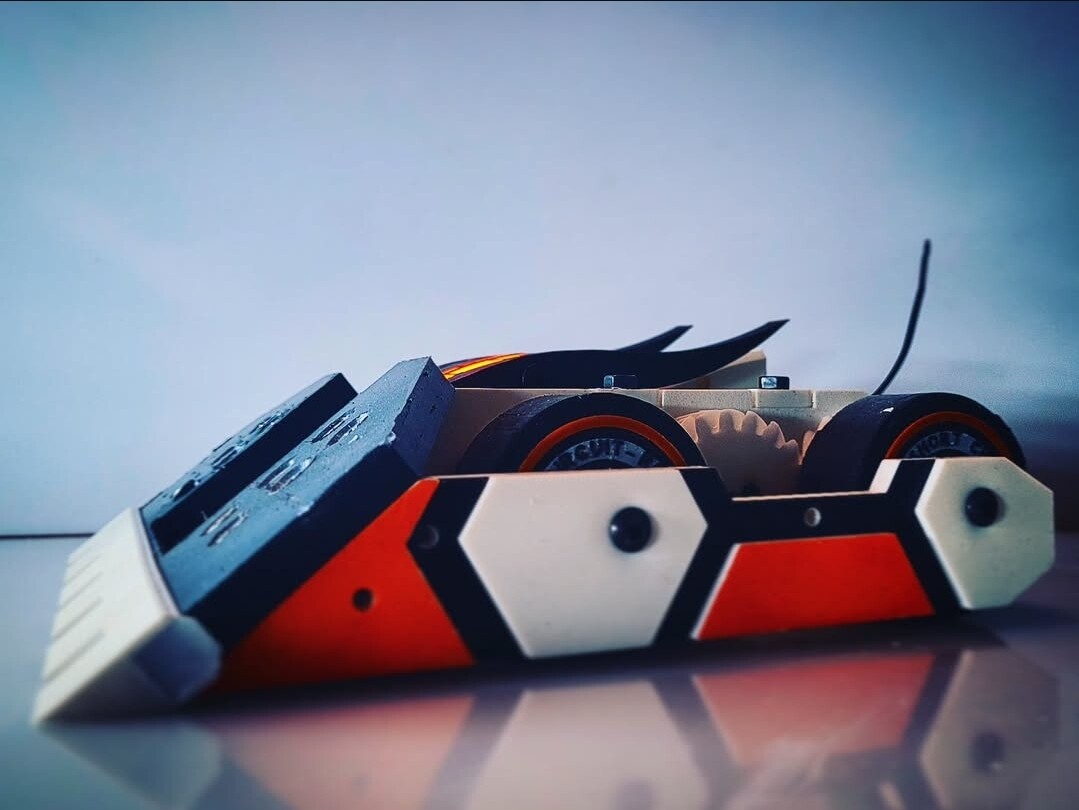
After the champs I wanted to rebuild the entire thing.
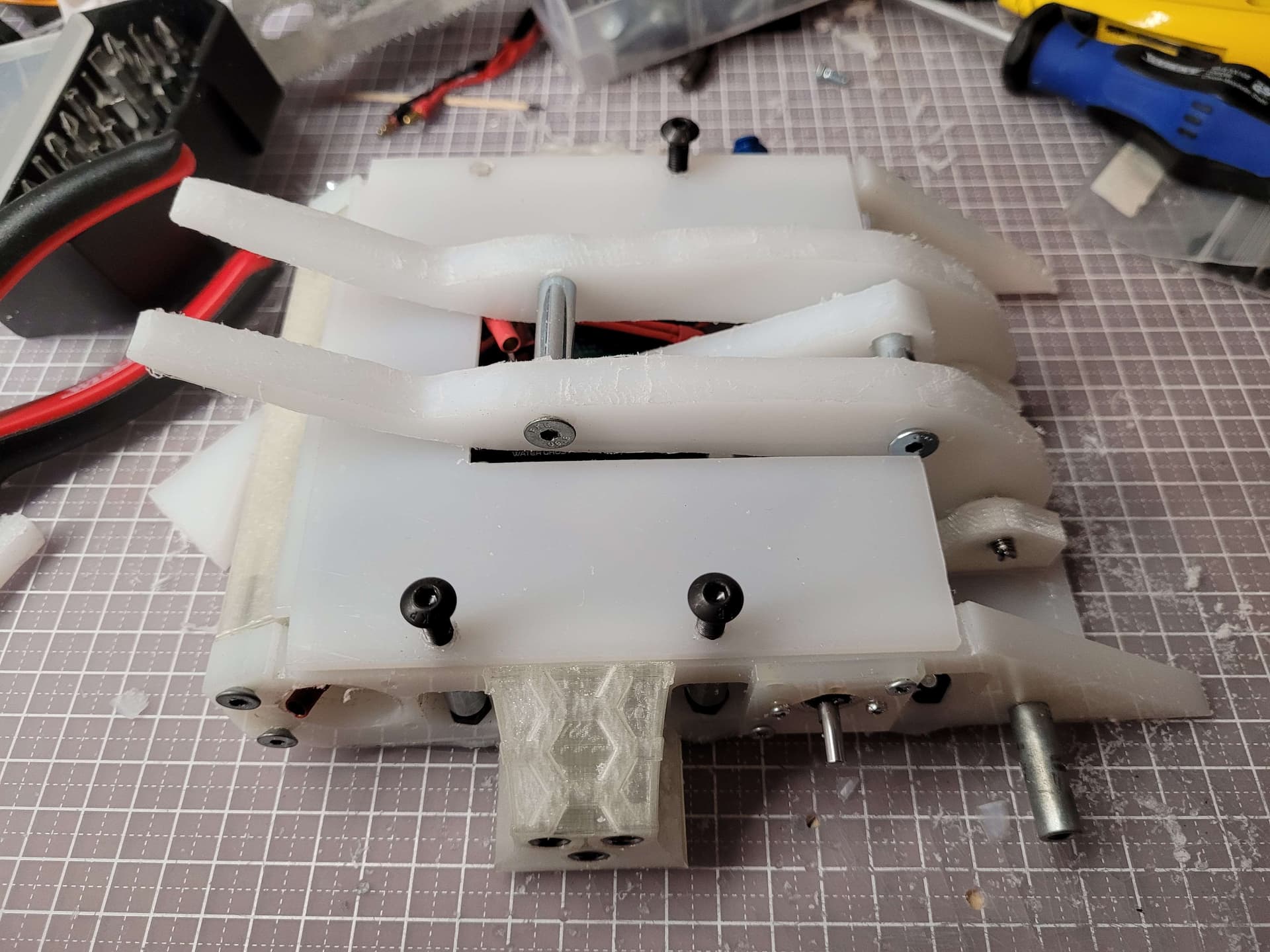
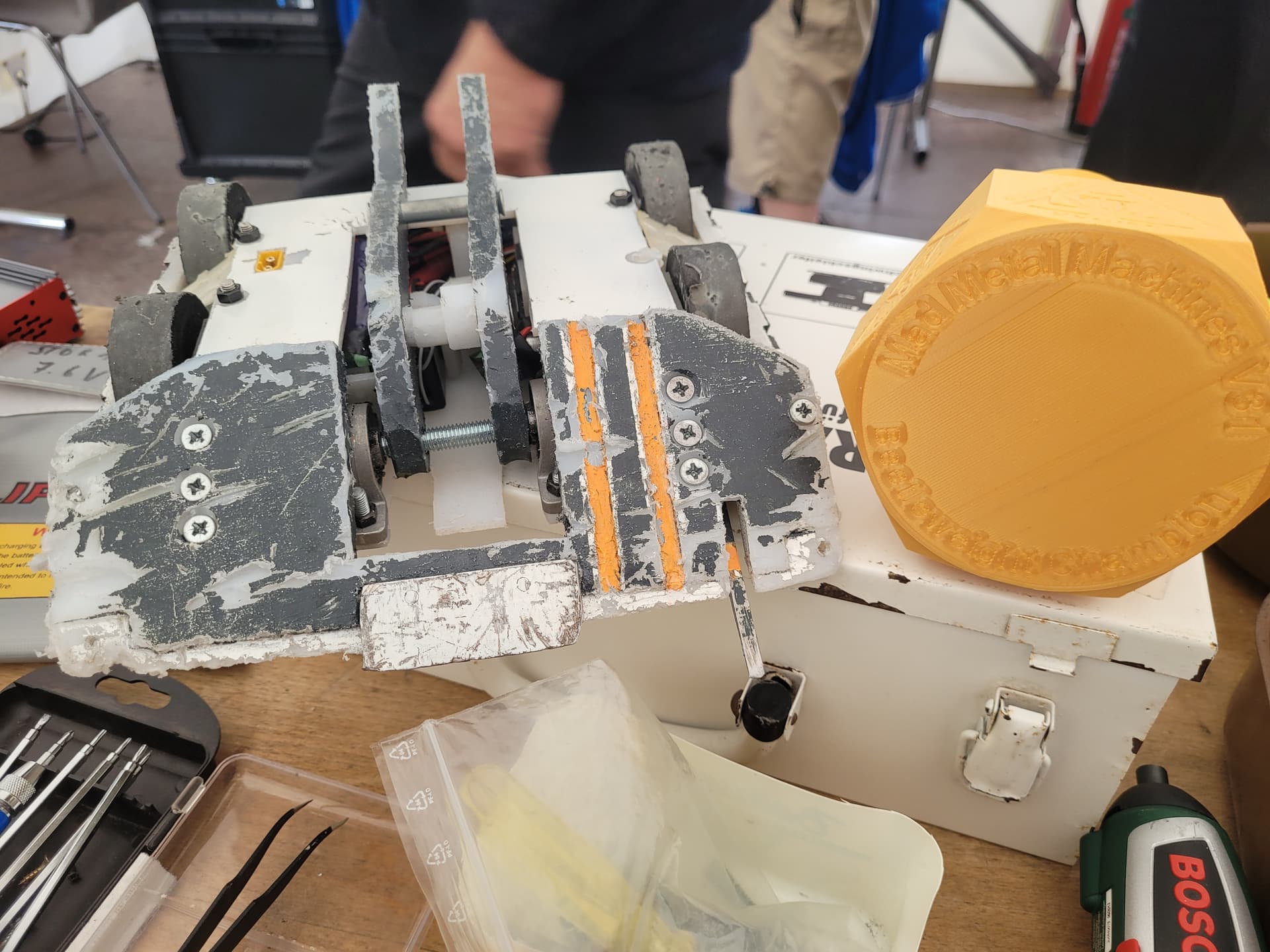
I learned what worked and what didn’t in that version. I started by designing the thing in fusion and printed out some hollow parts to get a feel for the dimentions of the thing.
I quite liked it but it had to be modified a bit.
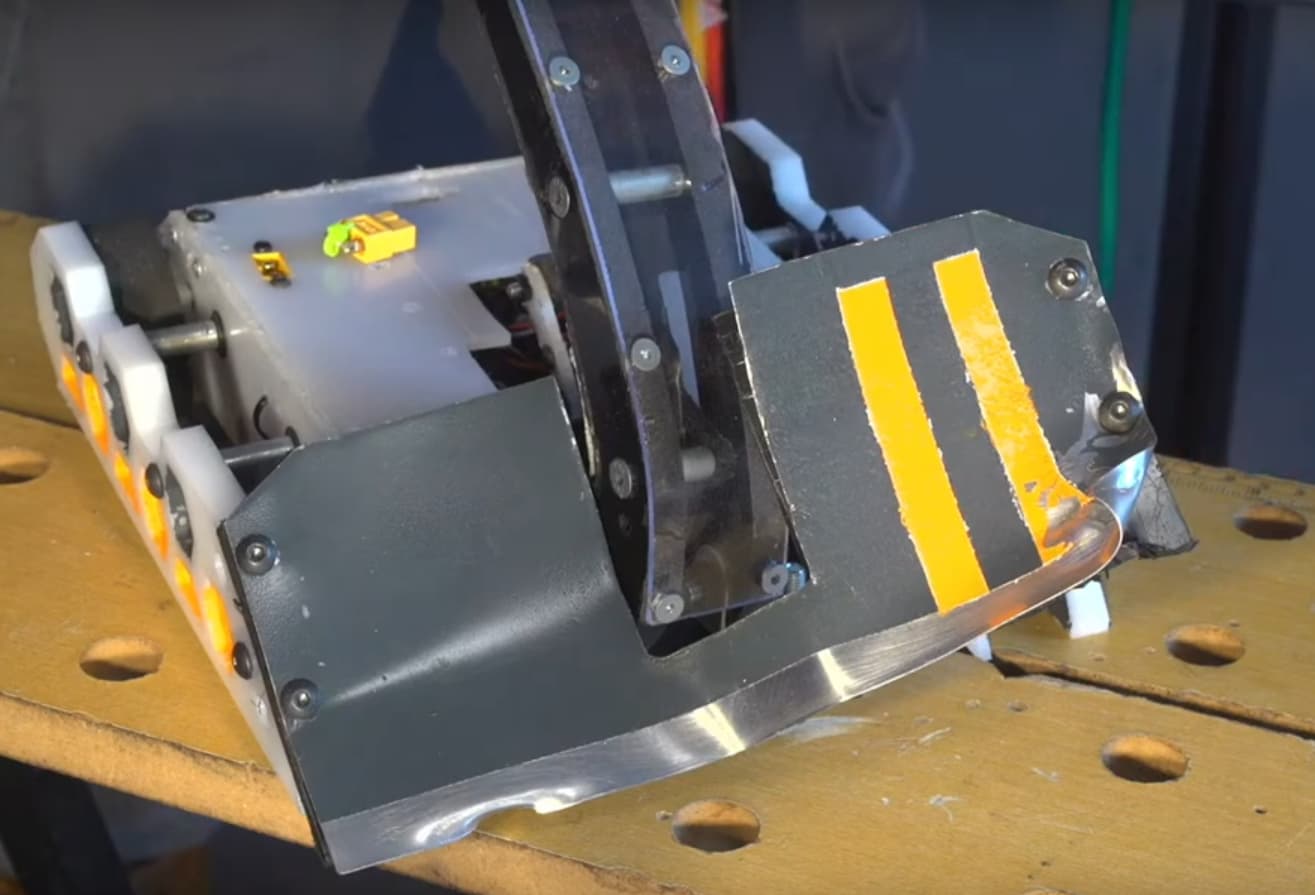
What really did work on the old version were the 10mm hdpe site pieces. The old ones were made by Cosmin but this time I went to a local makerspace to have them milled
At the champs I was in a whiteboard rumble with a lot of other lifter bots. one of thos was a bot that I refuse to pronounce the right way… it was abracacrabrara or something along those lines. They managed to get their lifter right between my wheels and lifted me up so I couldn’t do anything for the majority of the rumble. to combat that I decided to ad a little tpu piece between the wheels on the new bot.
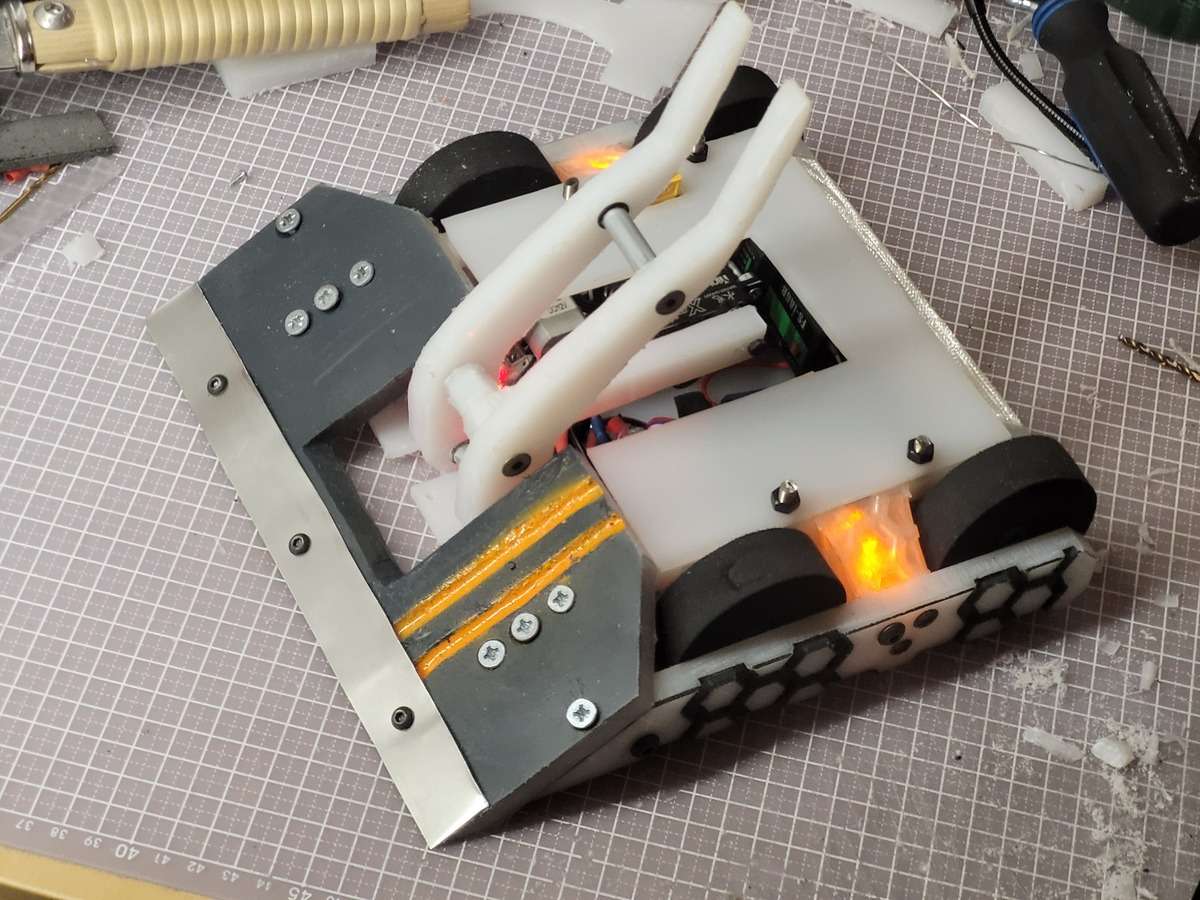
the rest of the build went smoothly. I entered into one of our german MMM events and it somehow made it to second place only loosing its final fight.
I’m quite happy with how it turned out but I’m still working on improvements. Next thing I want to try out is running the weapon with timing belts instead of that ugly looking arm there.
If all the frame is 10mm that should be a super tough machine. Upgrades are on point. Are you planning on doing anything to stop it from resting on the flat sides? Or does the arm unbalance it enough to tip it?
Weight distribution, the round screw heads and the arm usually stop it from being stranded on its side. I’ve not ended up in that position yet but if I ever do I’m sure I’ll do something about it. Like making the wedge a trapezoid shape so it sticks out more on the bottom
Oh boy it’s been a while.
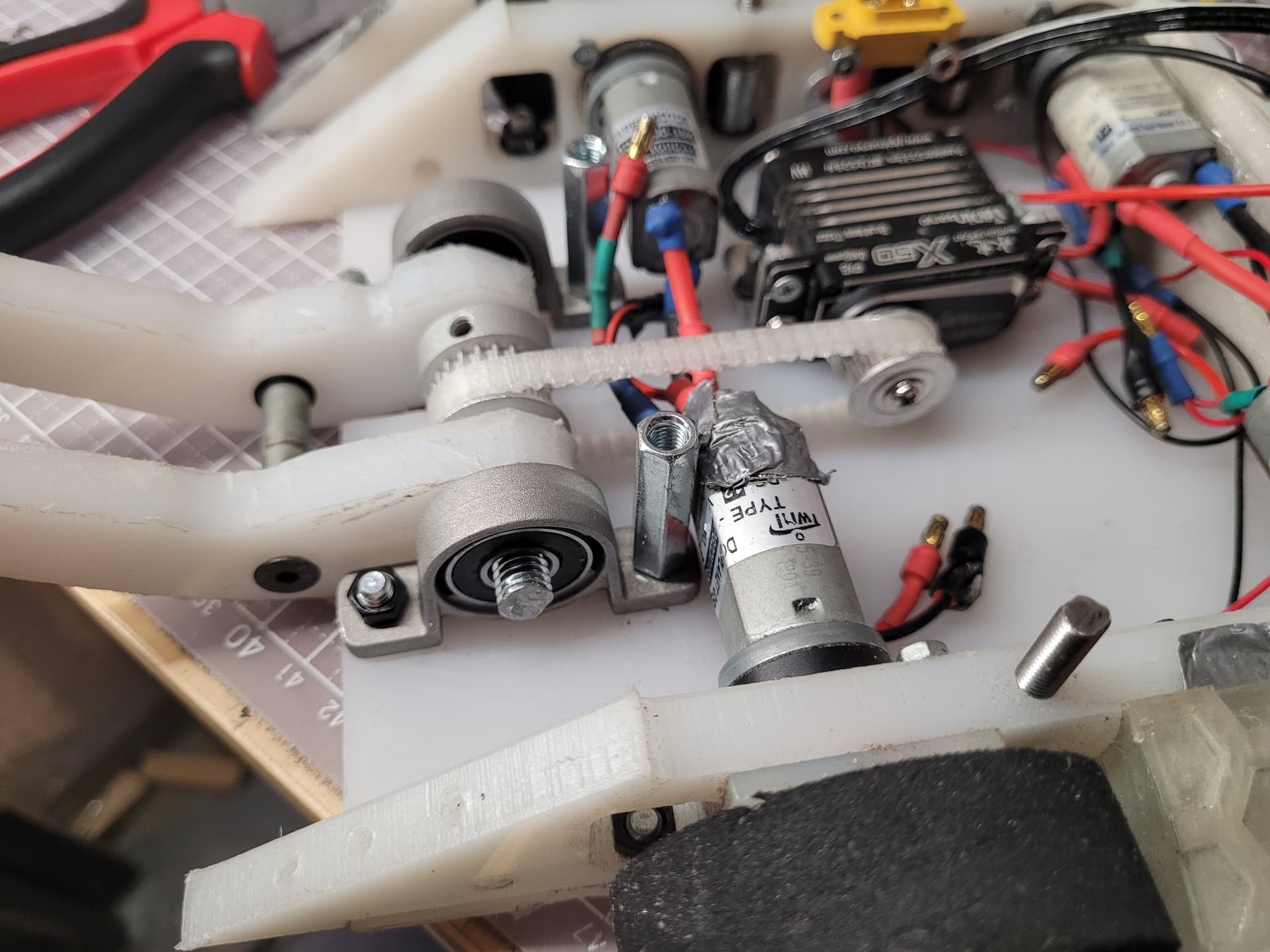
The overall design hasn’t changed much since last time I posted but I continued working on the bot. Did I mention that I wanted to operate the weapon with belts? Yeah… I tried that and it failed. I bought some pulleys for the servo and printed a belt as I couldn’t find the right size for a reasonable price. All the belt did was slipping and the powertransmission didn’t really work out.
So I went back to the old and proven HDPE linkage between servo and arm. A new servohorn made sure I had the full range of motion I always wanted.
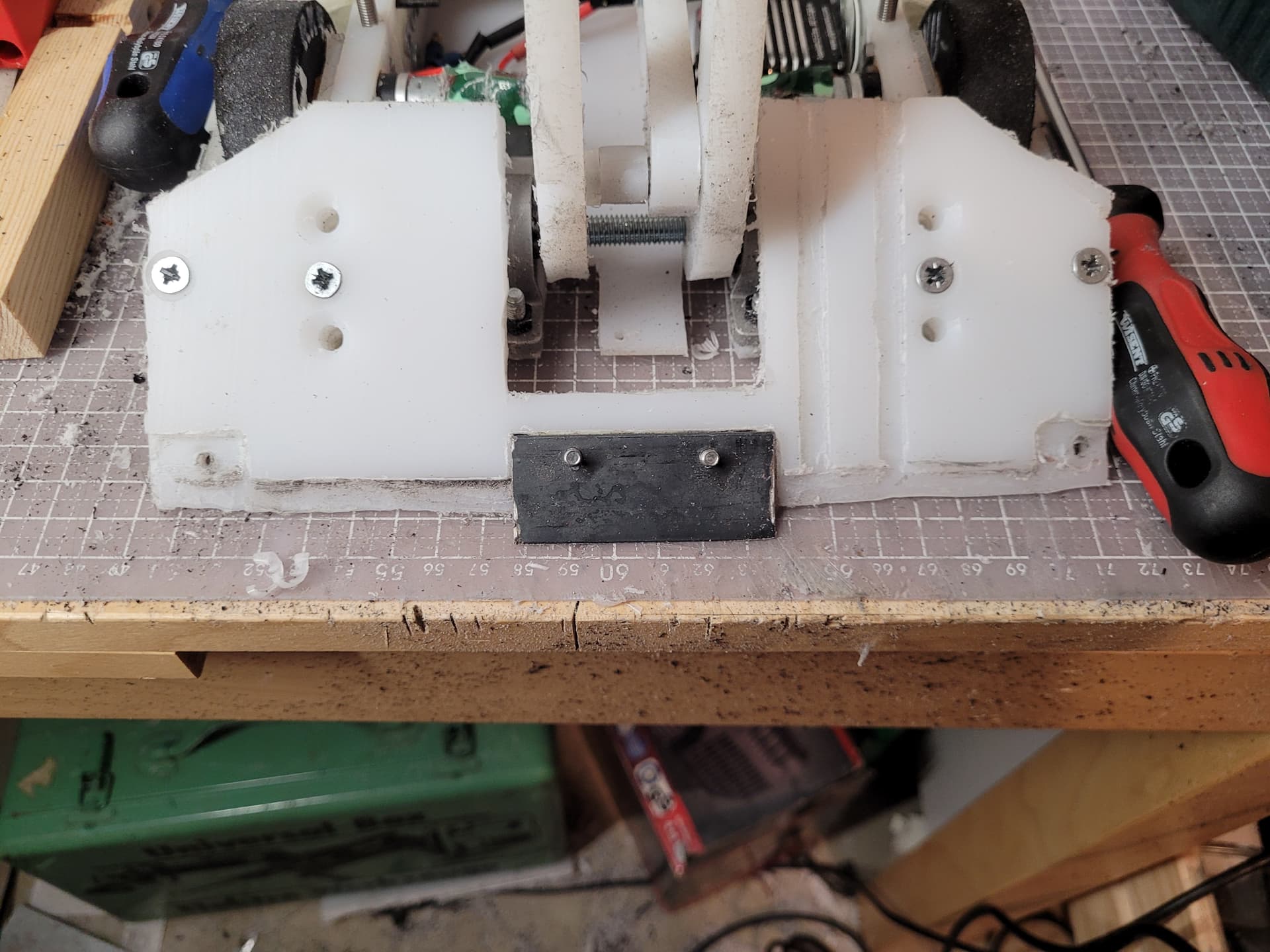
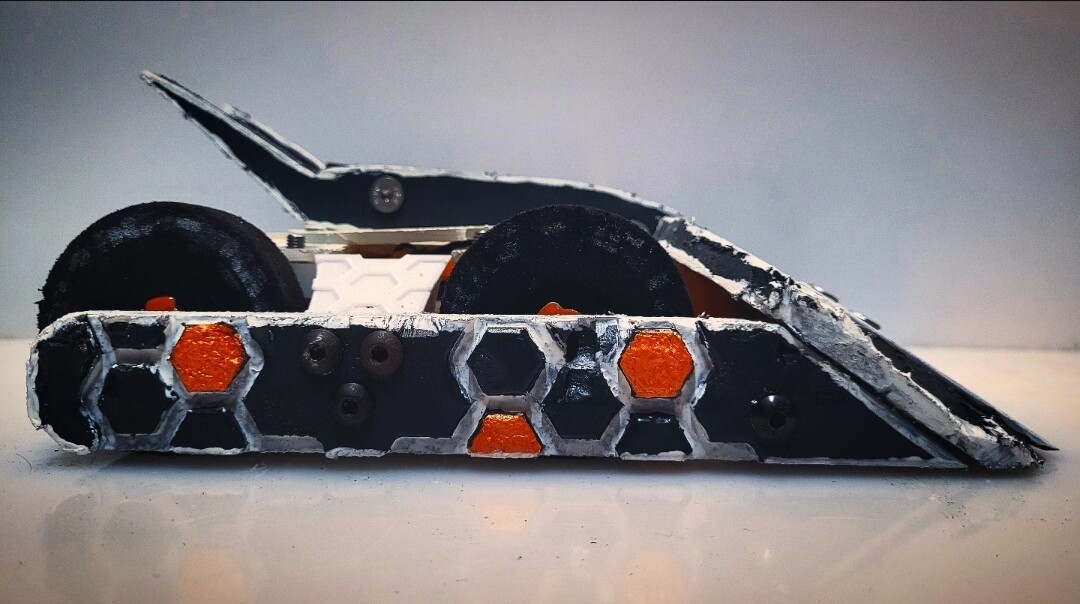
I also added a steel lip to the hdpe wedge to make the wedge work more as a wedge than all the other wedges I wedged on the wedge before. wedge.
I used the same material to also ad a single fork (because of weight reasons)
I want to do rapture at some point and I feel like this version should perform way better than V1 back in '22. There are some more changes I’ve planed for this one but I’ll see if that improved the bot or if it makes it worse.
Edit: I totally forgot to mention all the electronic trouble I had but Craig, Nick and Joe helped me out alot so thank you guys once more <3
Some minor Updates:
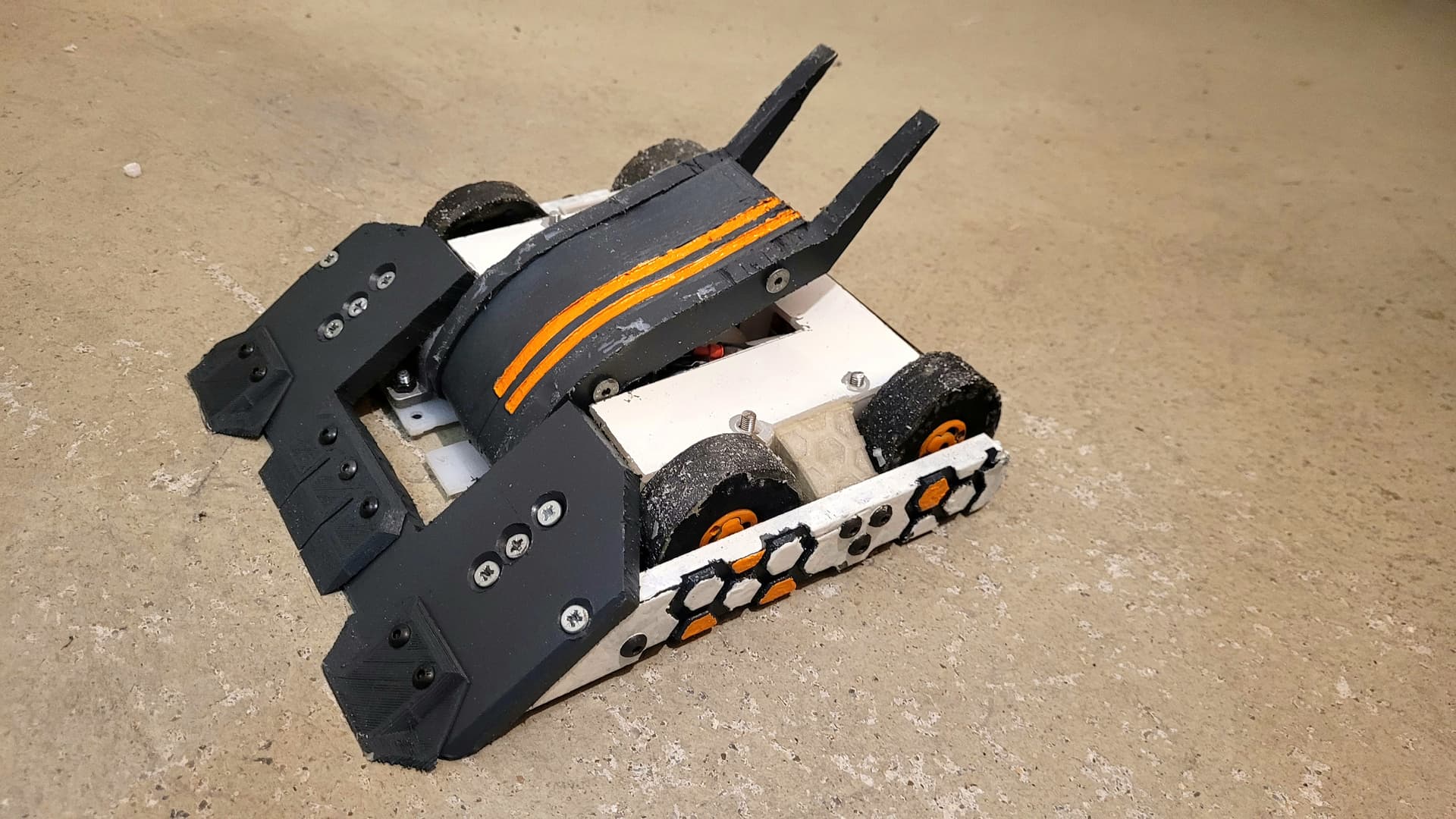
The width of the weapon has been doubled to allow for a wider range of attack.
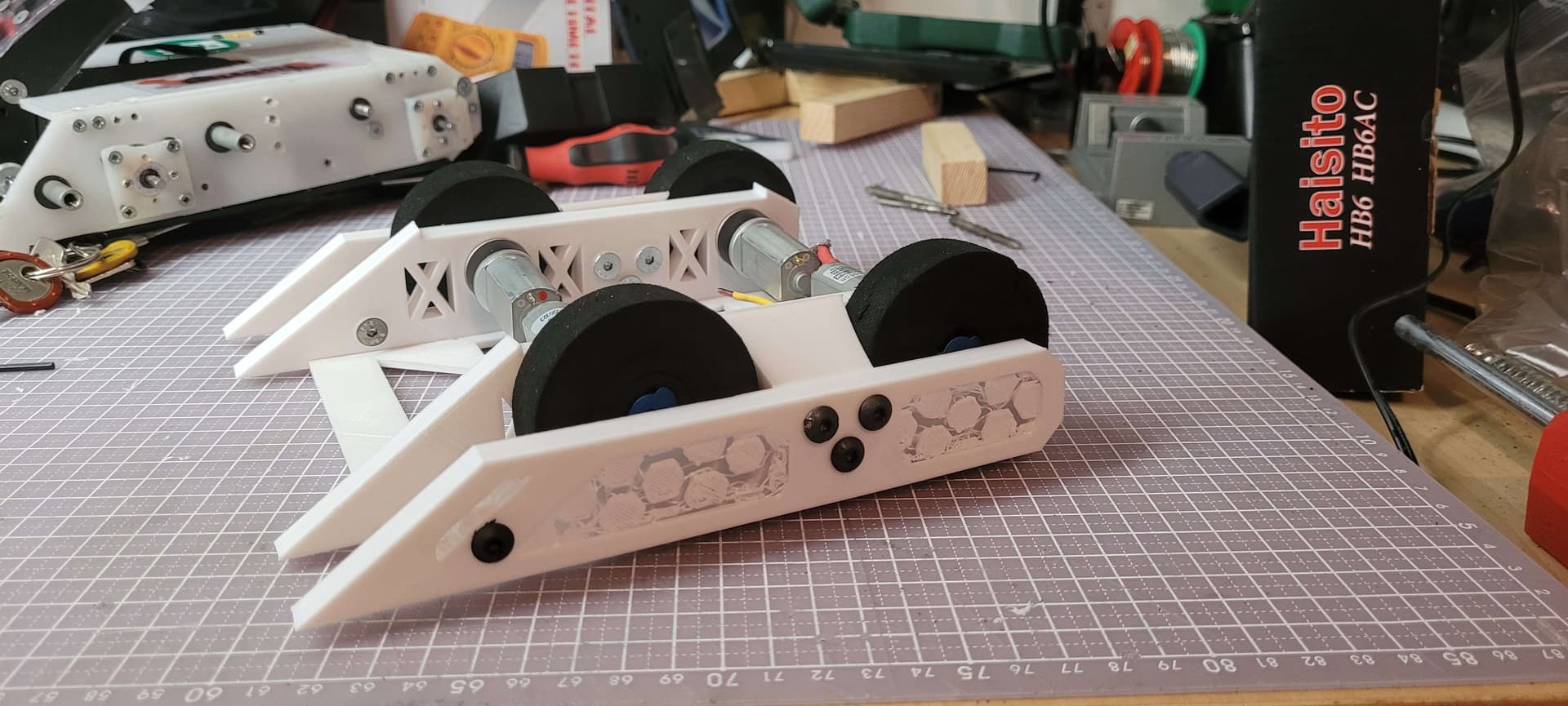
TPU wedgelets have been added. Now the front right wheel isn’t touching the ground anymore. Will try to fix this later for tomorrow’s event.
The link location has changed and is now housed in the right pod between the wheels.
The stripes are now located on the weapon arm instead of the wedge.
I’m not sure how much longer version 2 will be around but I’ve got some ideas for the future. Especially now that I own a genmitsu myself.
So after having some issues with the wheel and getting chewed IP by Wishbone in round 1 (and forgetting to bolt down the topplate)
Bart was kind enough basically make me a titanium wedge that’s mounted on top of the hdpe.
Never ended up using the tpu wedgelets.
It all worked out quite well until I had to face wishbone again. Now there’s something seriously wrong with the bot. But it somehow made it to the podium again. That’s 5/5 for the german events.
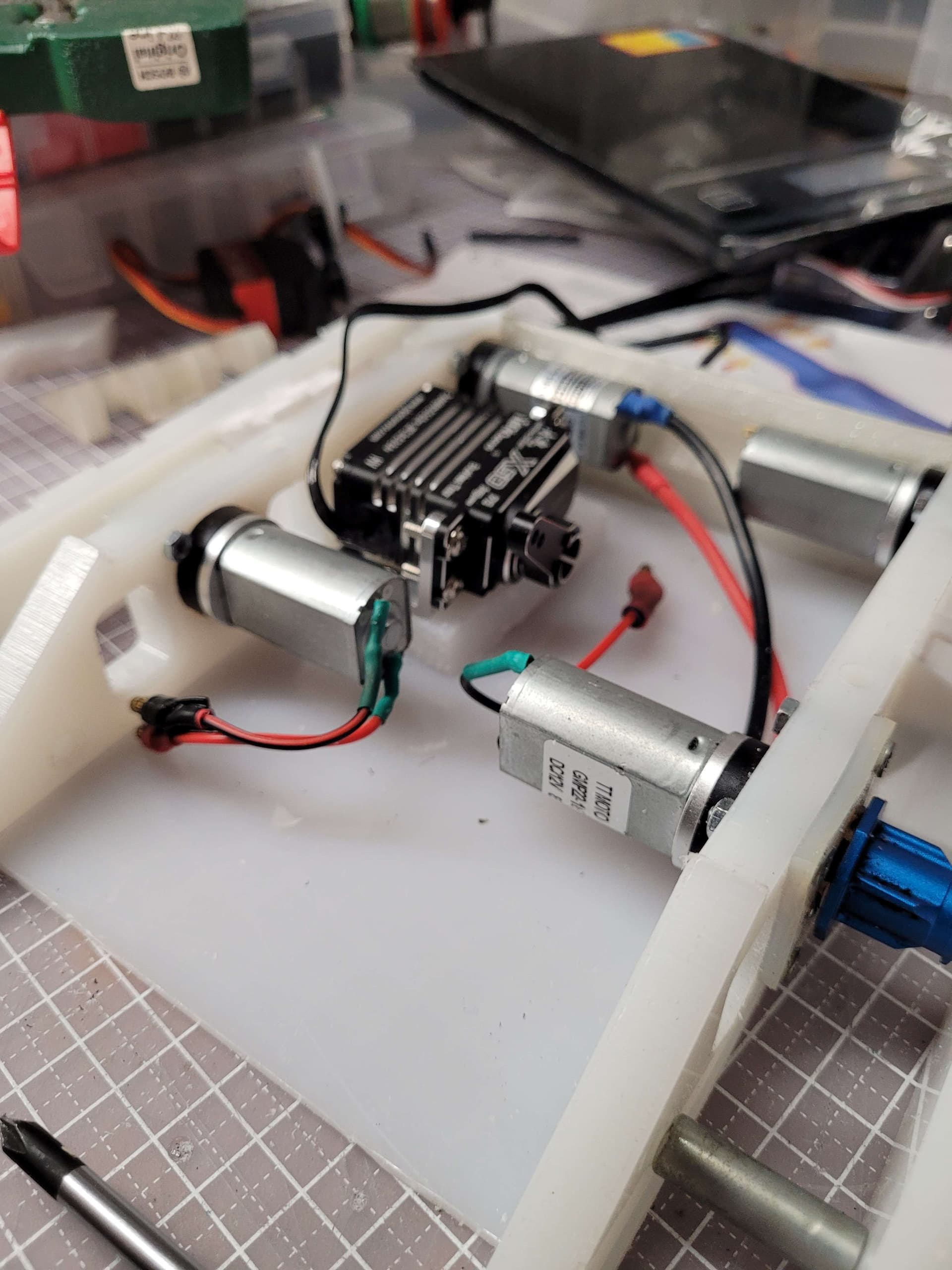
Today I started up the bot for the first time since the event and I found out that the bot is having an esc issue.
I had the very same usdue with the other dual esc I used before the event and just switched it out for the spare one I had. Now both have the same Problem:
Does anyone know what causes the sudden direction change? It happens by driving forward and backwards.
Yes, looks like interference. Caps on the motor work great, separating signal and power cables can help too. The further they run alongside each other the more interference the signal wire will pick up. Not always possible on a combat robot I admit…
I took the bot to MadMetalMachines vol.33 last weekend. It didn’t perform as good as it did in the past. Got a bye in round 1, a close win to an undercutter in round 2, had to forfeit a fight in round 2 due to a loose solder joint that I discovered right when I was loding in the bot for round 3, a loss to a hammersaw and another close win against a vert. I ended up somewhere in the middle of the field. Got some serious traction problems on the still rather new steel floor. But I got to fight babrog in a whiteboard Fight and got to meet Killian Murphy in a big rumble. Meeting Eoin again after 6 years was definitely a highlight. Last time was at buggle 2.
I basically just changed the visuals on the bot but I think this version is now retired. Got some plans for the next version that doesn’t necessarily involve brushes.
Boy oh boy…
That took some time. After the event in April I was dedicated to build a new version. Brushless drive and better grip on the wheels were the main goals. I’m sure I could’ve easily still used brushed drive motors but I wanted to cut some weight.
I’ve build the entire bot from scratch. It now uses 3d printed gears, a milled wedge and custom wheels. The lights are back in the lifting arm as it makes it stand out a bit. It’s still very close to the weightlimit but it should pass.
I like the way the little guy looks like and we will find out how it’s gonna perform next month. I’m not aiming for any trophies but I hope it finally gets to do what it’s meant to do: control. Hopefully no more sliding around as if I was driving on ice. Fingers crossed