This will probably be a bit rambling and all over the place for which I apologise but we move.
Schism started as an idea for a fully printed beetle in mid 2018 and you can definitely see it’s age coming through compared to how it actually ended up.
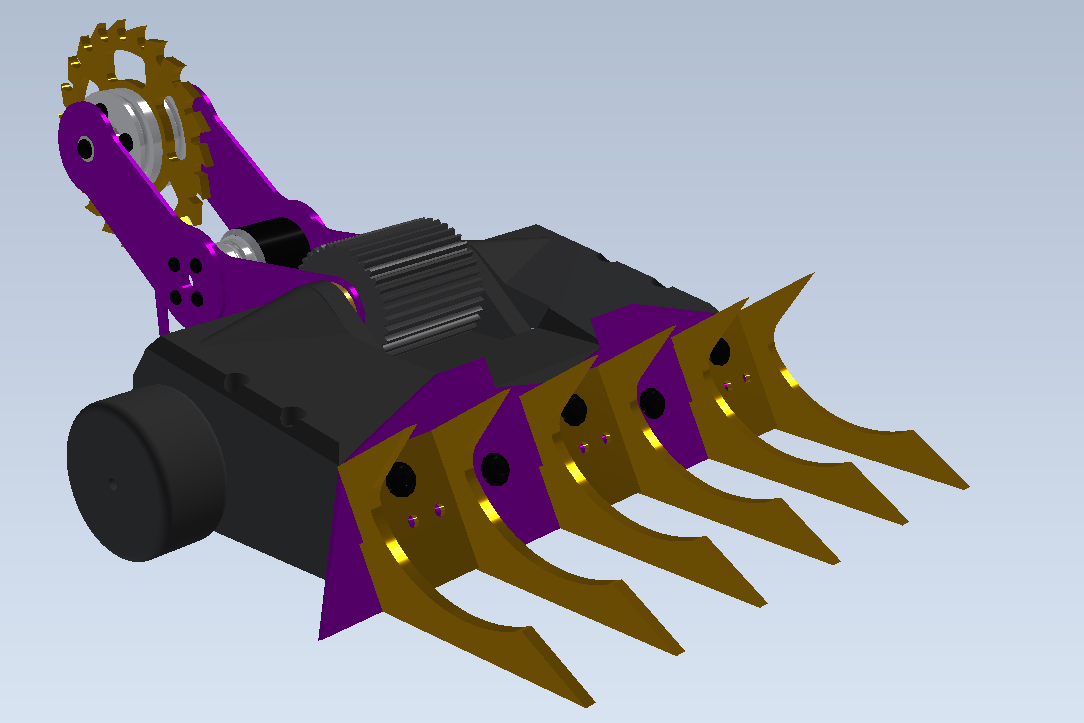
What actually ended up happening with this early version is I realised I was way in over my head and decided to take a step back & re-evaluate.
A few years later I built Anomaly for Rapture which was intended to be a whiplash style lifter with a hubmotor vert on it, though due to my poor design choices alignment on the hubmotor was never quite good enough to have it spin freely enough to run so it ran as a pure lifter for the event.
That left a gap in my heart for a spinning thing on an arm so a few months after Anomaly I started messing around with a design for a hammersaw starting from scratch.
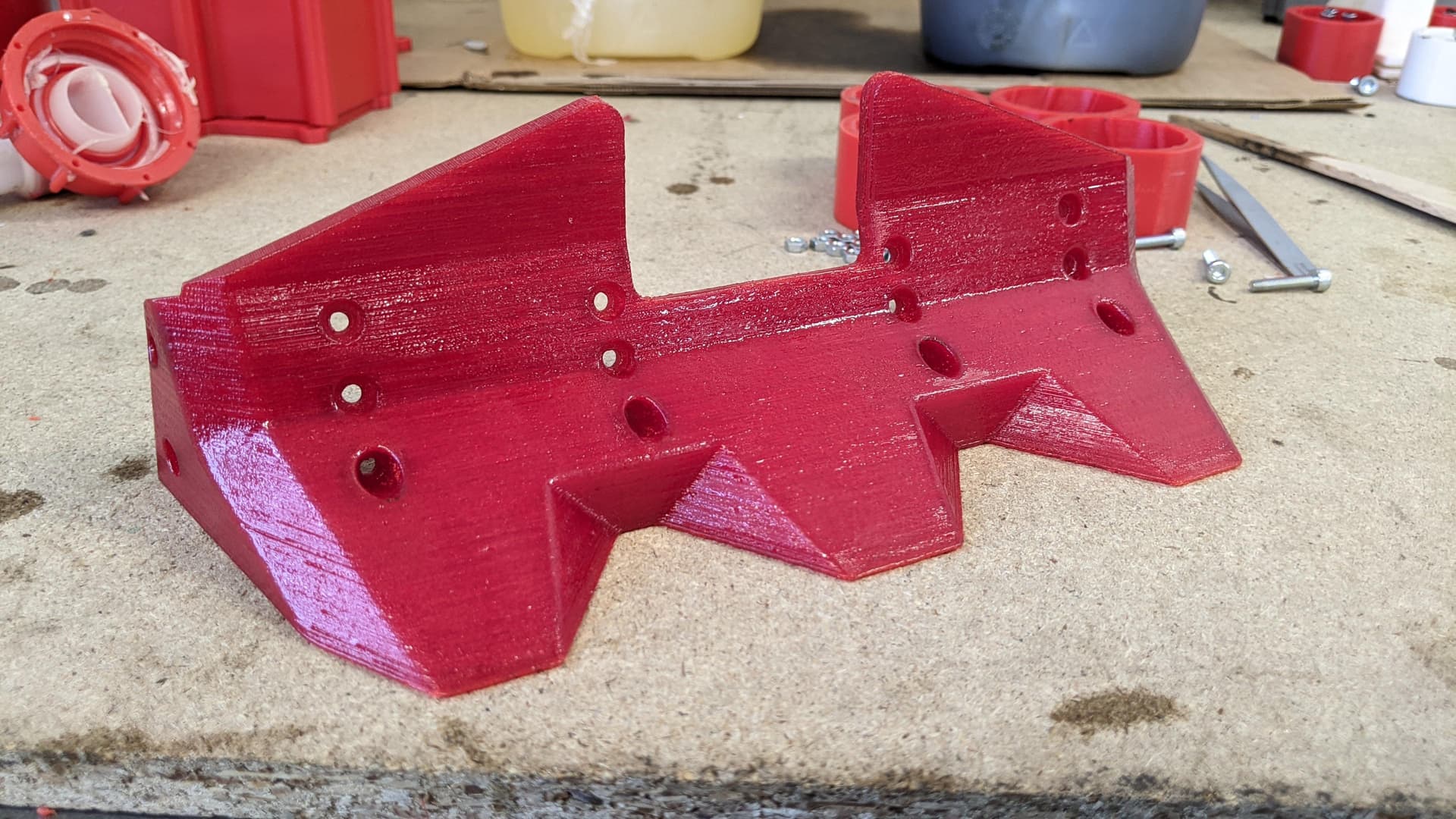
It started with a printed prototype frame once everything was designed.
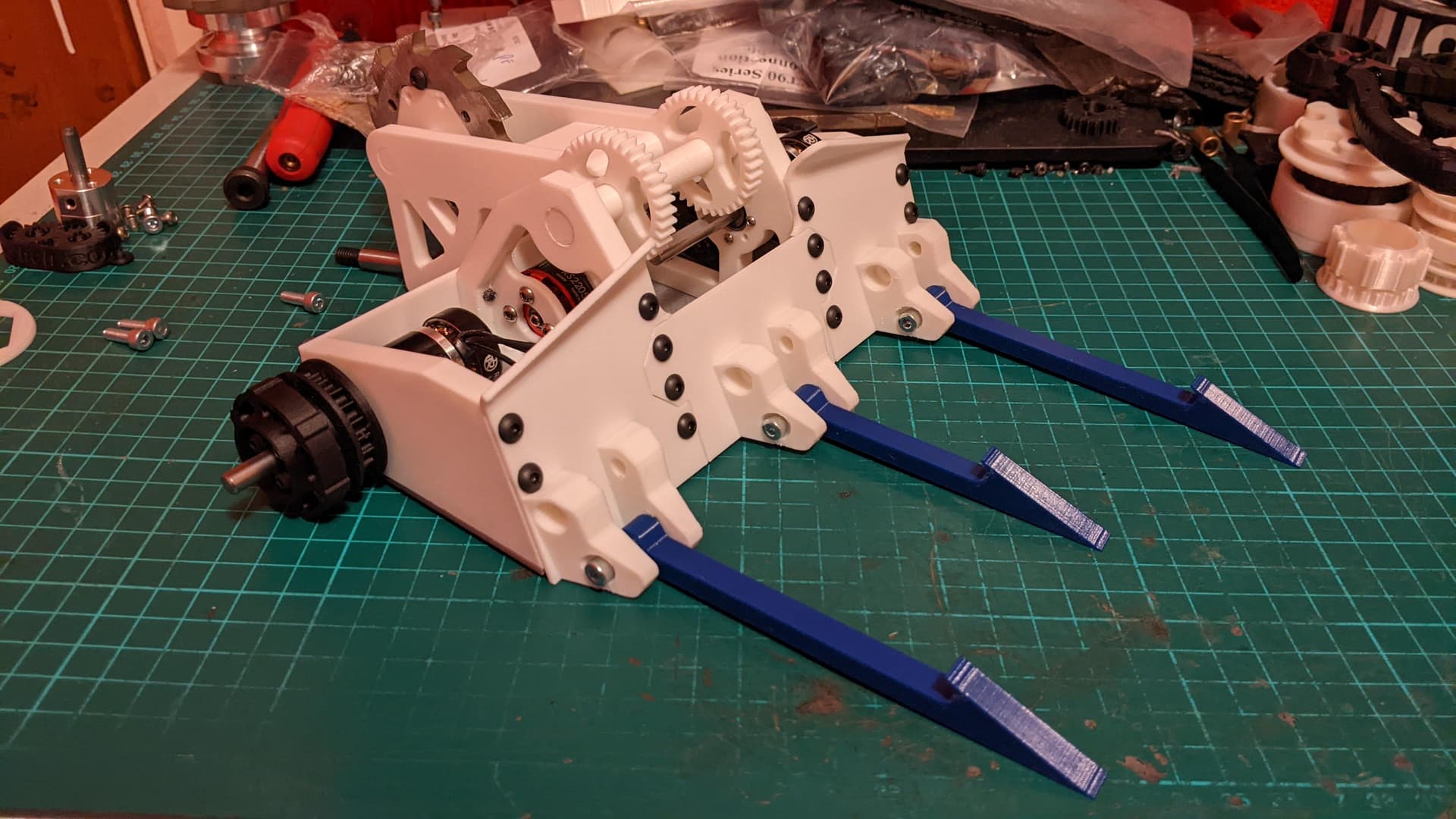
Everything was designed around some experimental motors from Repeat Robotics which weren’t guaranteed to be restocked depending on whether there would be demand for them, so why not base a robot around a possibly impossible to source product?
Luckily however they did catch on and more were ordered and stocked before Schism’s first outing so it was time to order spares.

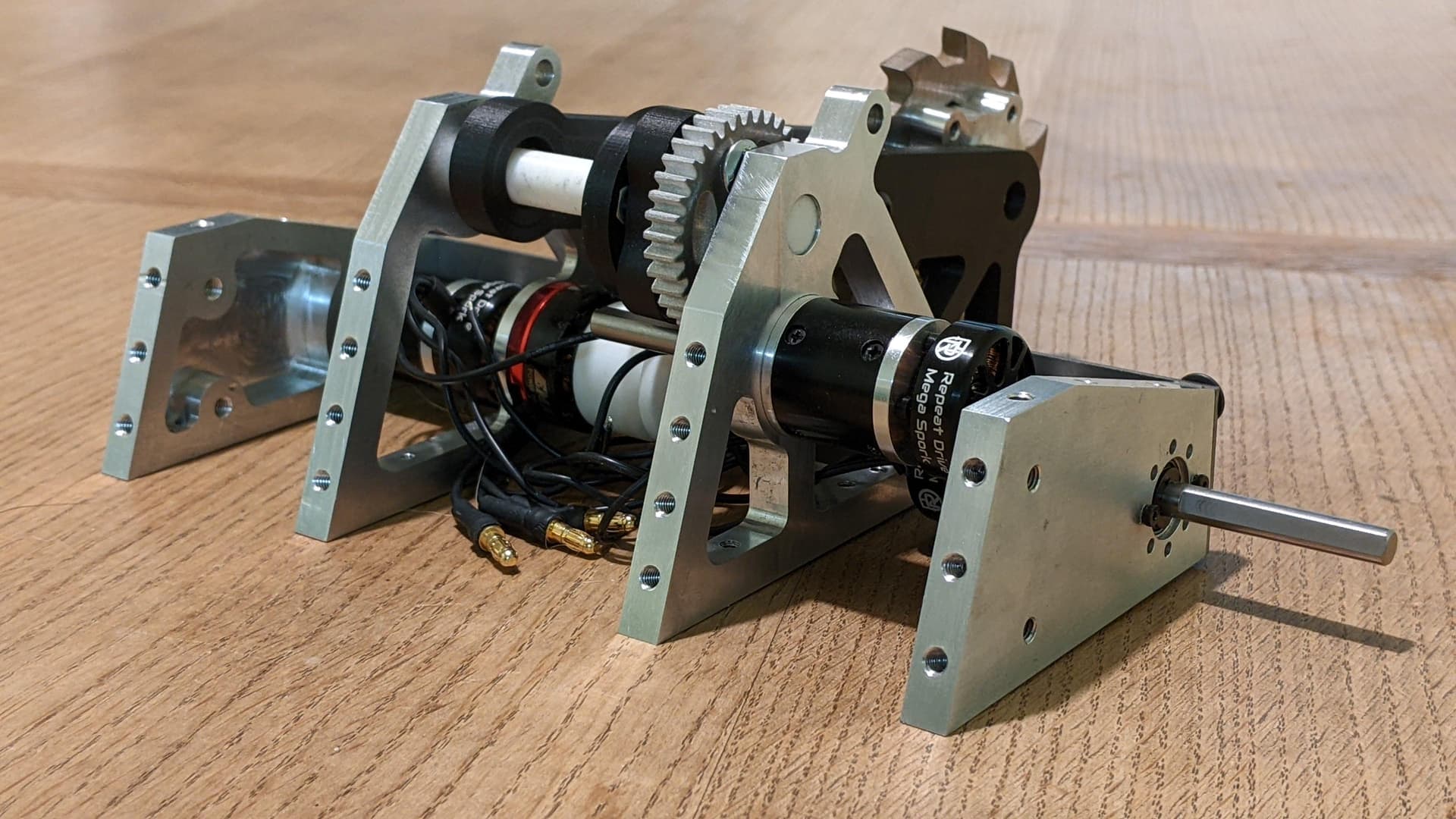
There was one distinct difference however between the initial batch that I was a part of the order for and the final production batch. That was the output shaft, in the initial test batch the output shaft was a two piece assembly consisting of the output shaft being pressed into the final stage planet carrier of the gearbox. The final production batch had a single piece machined output shaft & carrier stage that was then hardened (which is a great addition but makes them a bastard to cut the shafts down on).
This would come back to bite me later in Schism’s very first fight but that’s a story for another post.
Once the frame was designed I had to figure out how to make the electronics actually fit as 4 motors meant 4 escs and a bec. Those 4 motors also happened to all be outrunners inside the frame because I hate myself and make poor choices.
The answer to that was a 4-in-1 esc but there wasn’t room inside the central pod for the footprint of a conventional 4-in-1 esc. So the answer was this:
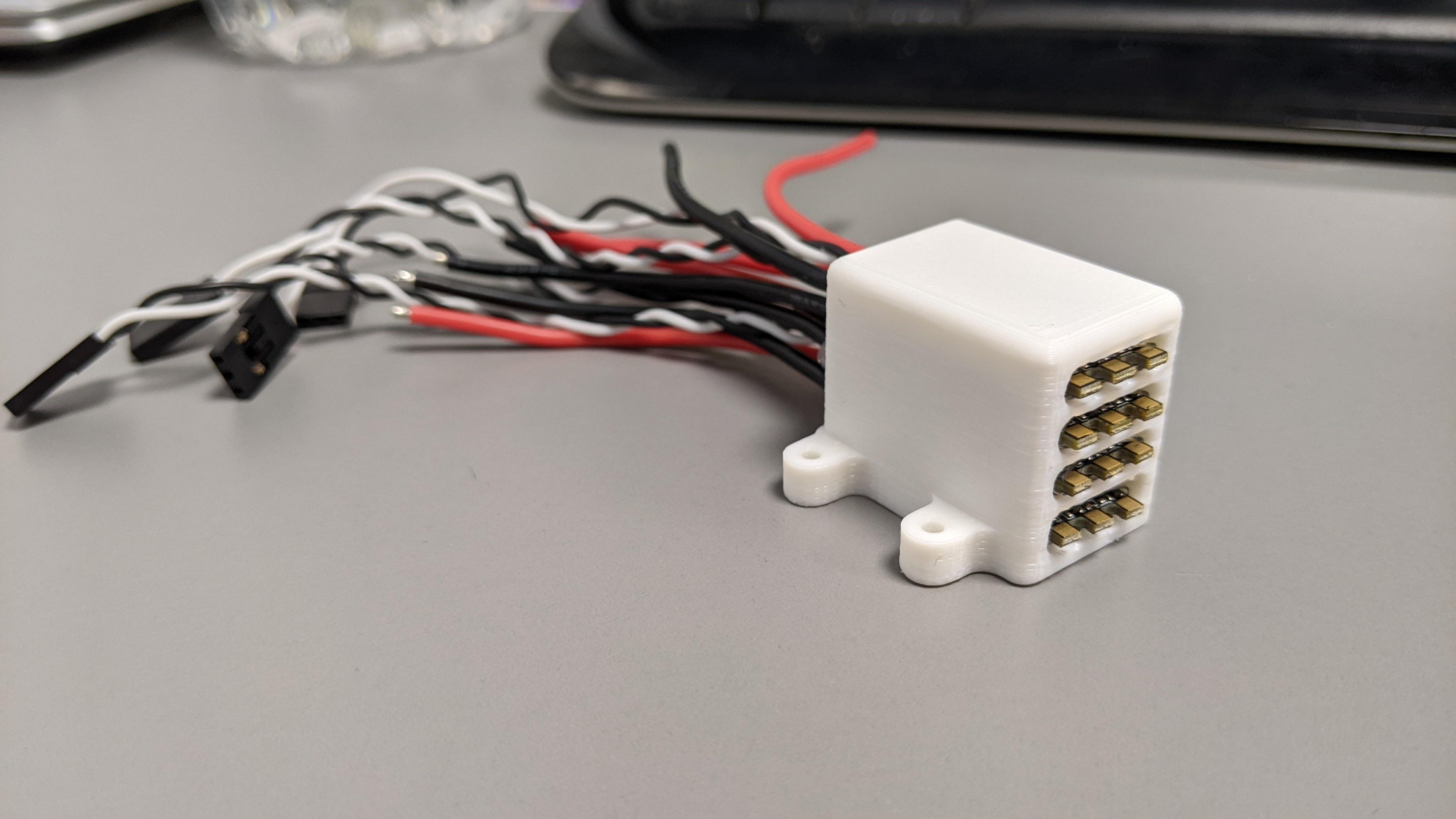
Because of the tall wide thin shape of the frame vertical space was in abundance so this monstrosity fits 3 standard BBB brushless drive escs for the drive and arm, an emax bullet 30a for the weapon motor (an Emax 2205) and a bec to power the receiver all in a little stack.
Next up was wheels.
I didn’t want to use foam for this as I wanted to have the option of running big magnets for extra downforce, so I went the custom route with some printed wheel hubs in Onyx with 60a urethane cast on to them and some custom wheel hubs machined by the amazing Felix.


Next on the list of things to be made was the arms for the hammer saw, these needed to be relatively lightweight as the plan at this point was to have 2mm Hardox front ends made for the bot which would take up a decent chunk of weight along with the 6mm forks.
These ended up being printed in Onyx and held up pretty damn well so these will be staying going forward.

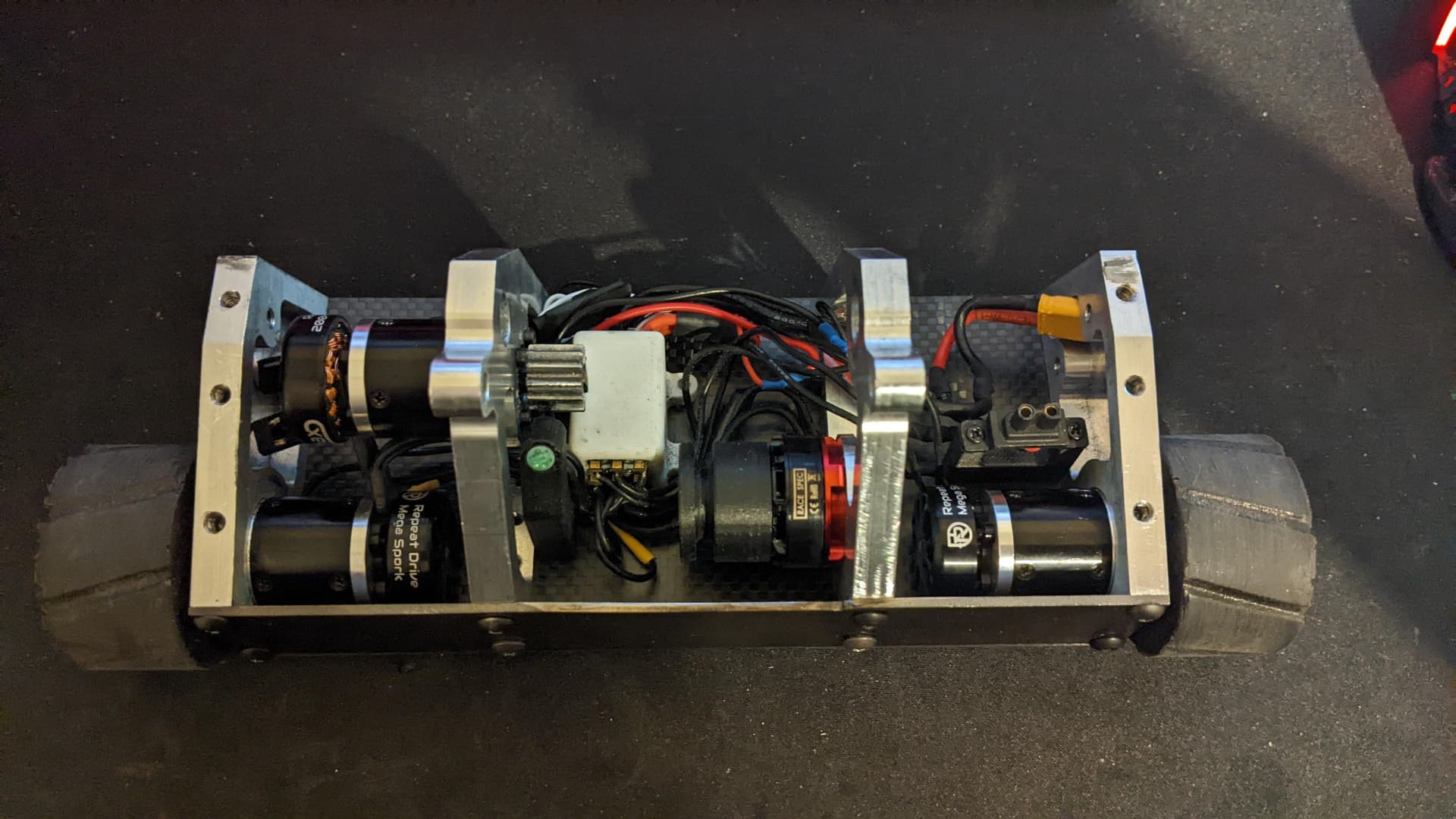
Thankfully, because everything was prototyped in advance to test fitment and dimensions everything slotted in nicely and the bot could be built in stages of replacing prototype parts with their final versions.
Also pictured there are the forks which were done on a group waterjet order, and one of the discs for the hammersaw which were reused from Toxin as this was designed around the same keying features as Toxin’s drum.
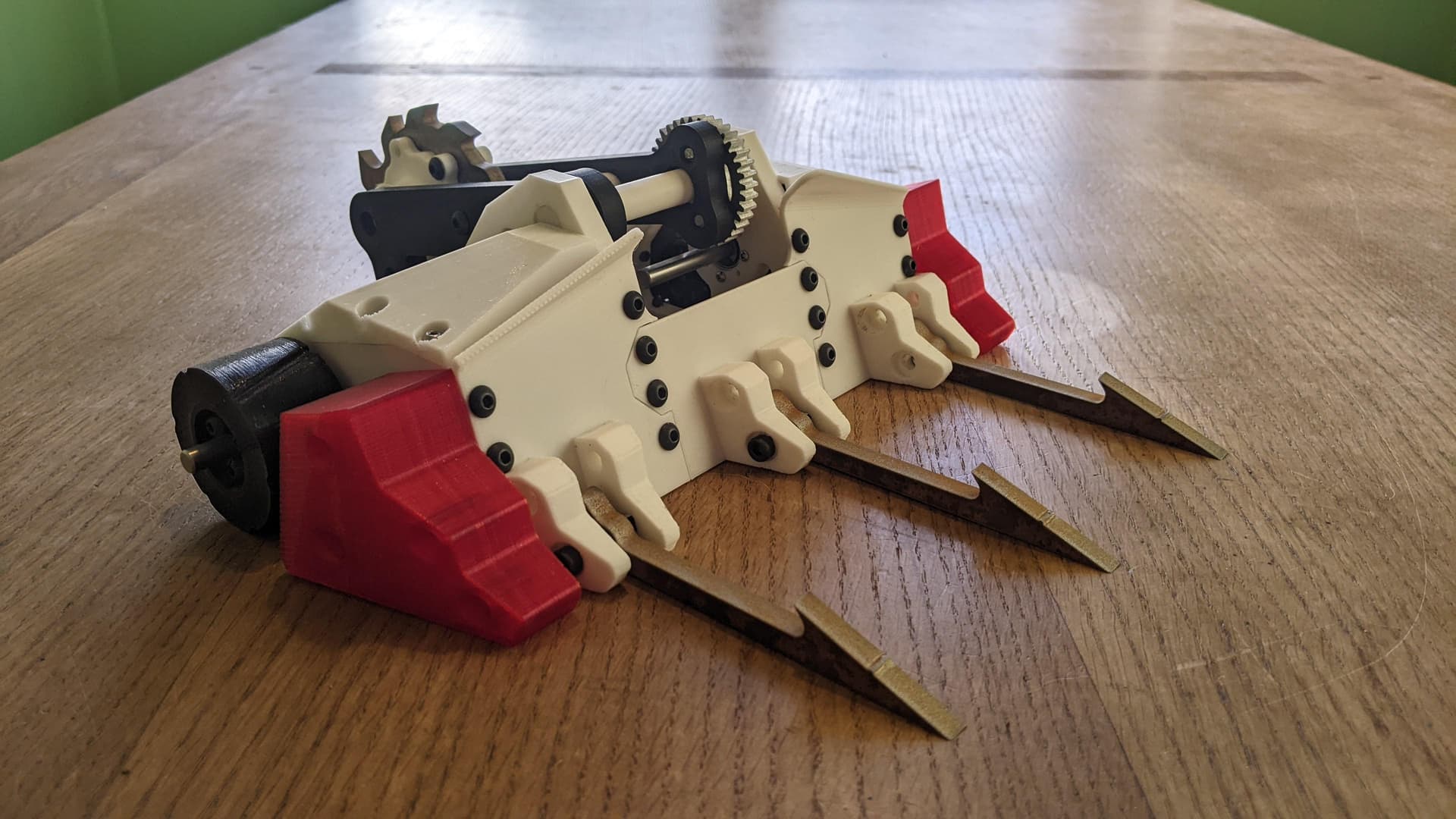
Next up was the frame itself which was very kindly machined by Nat of Team SC:

The main frame members as with 99% of my beetles are 8mm 6082 aluminium with a 2mm titanium plate at the back.
More assembly progress as more parts arrived:
The final parts to be made were the Hardox fronts, these were laser cut from a small sheet of 2mm Hardox I’ve had for years then bent & welded to shape, then having mounts for the forks welded on also in 2mm Hardox.

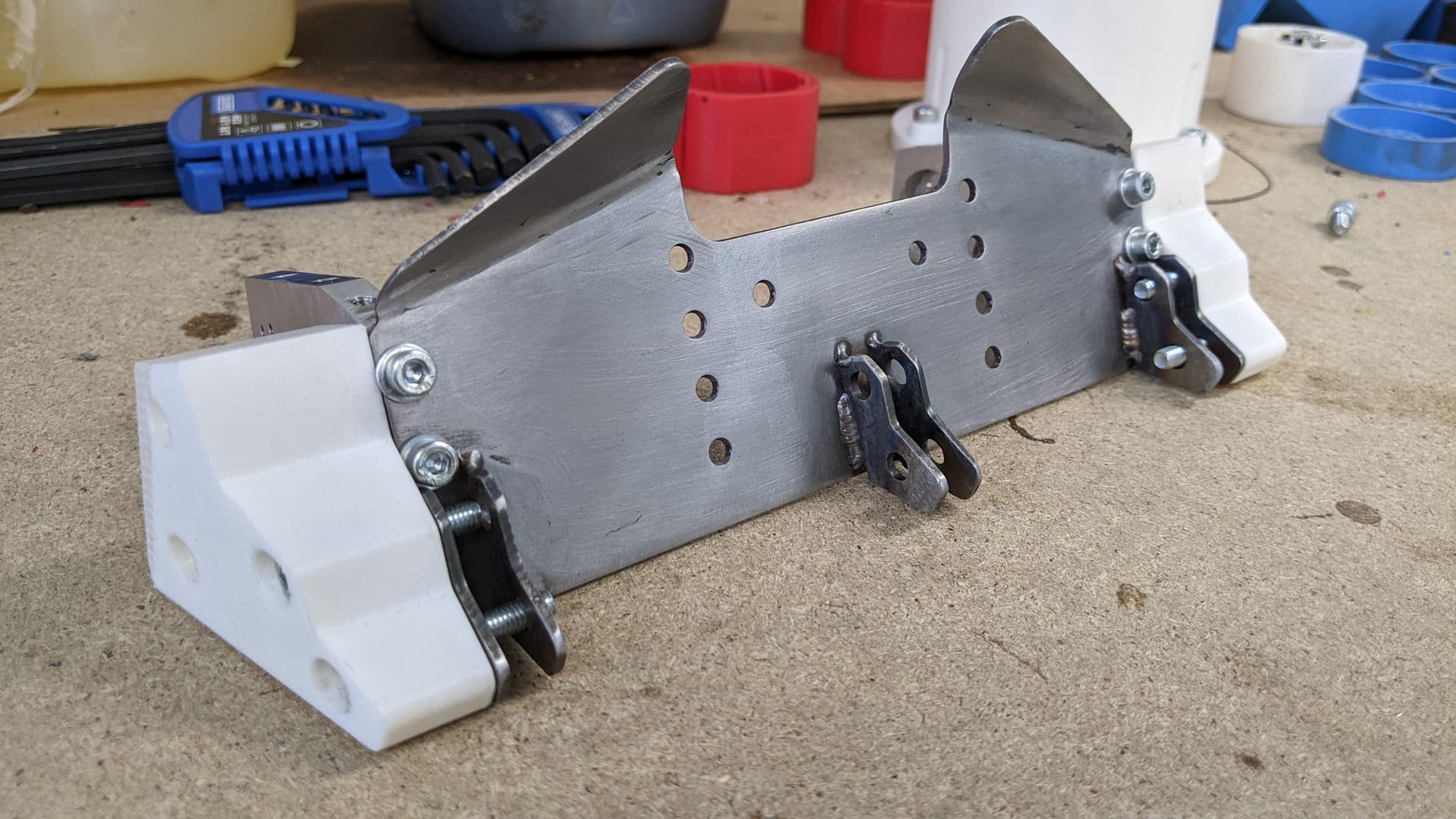
I was really happy with how these came out and at the fact that my welding didn’t look like total ass.
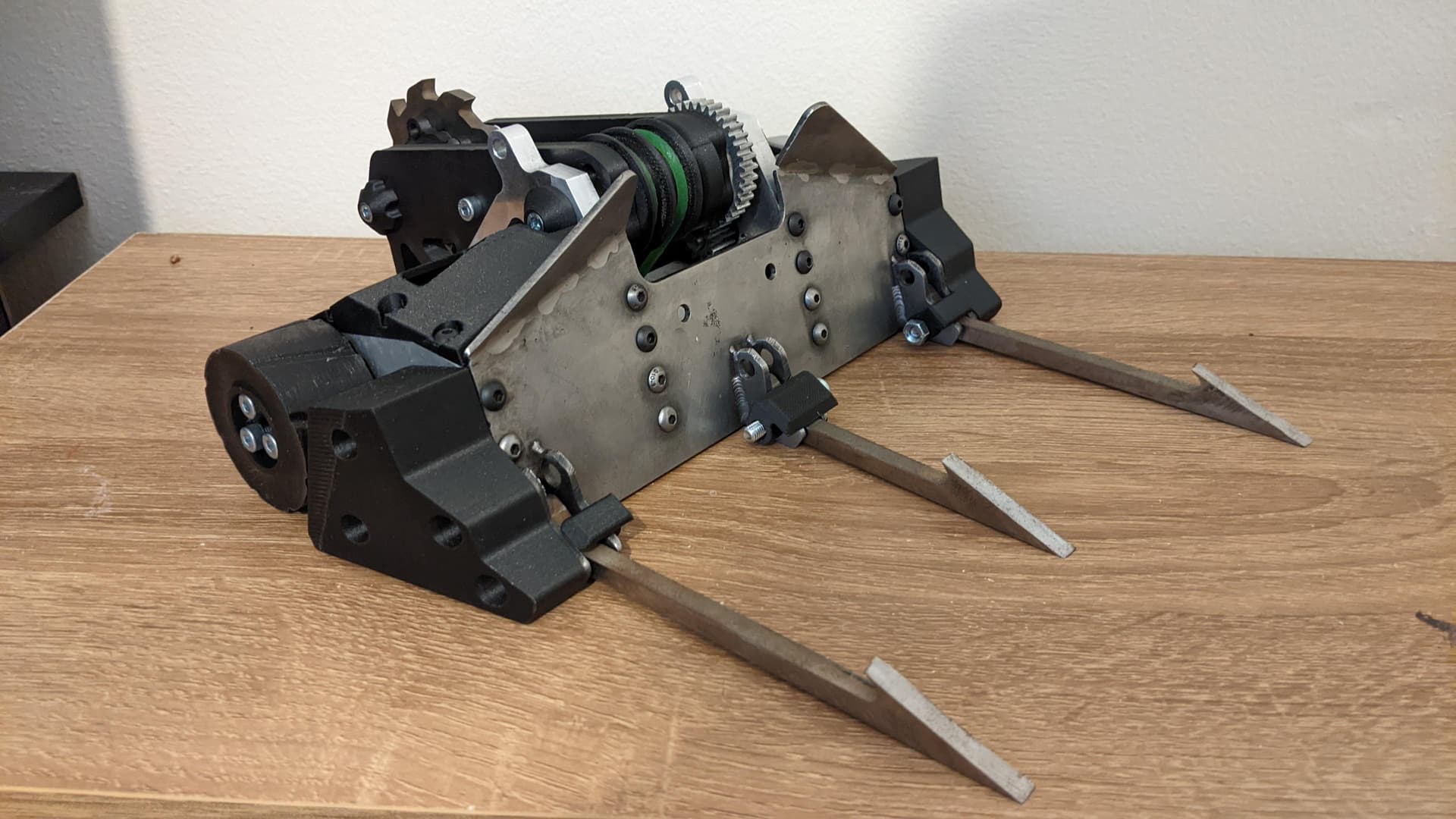
The whole hope for the front of Schism was to have modules ready to bolt on with different geometries and materials to match my opponent. This worked great as it took about 5 minutes max to change the entire front from one setup to another.
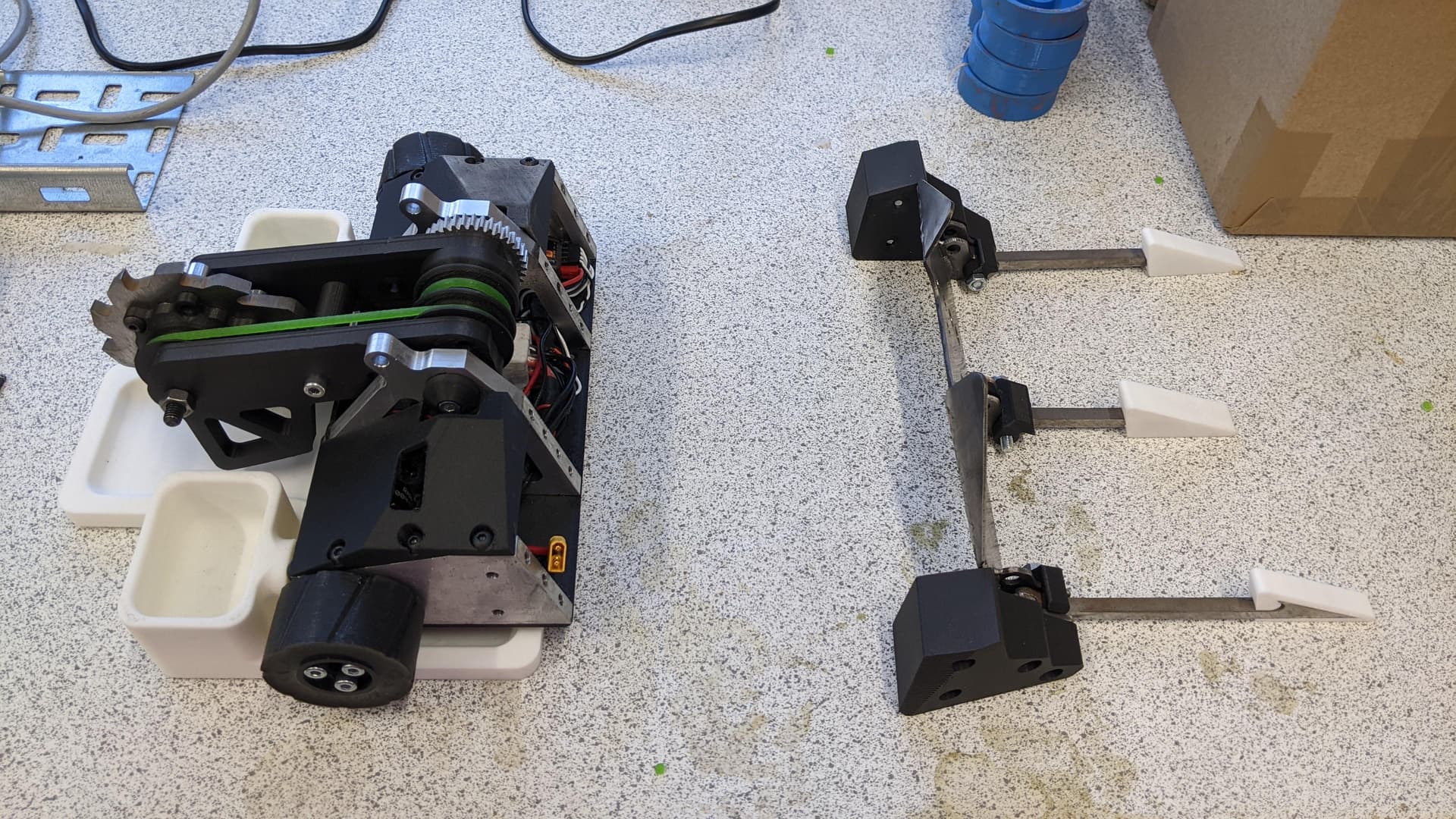
The main setups I had prepared before its first event was the forked Hardox front:
And a TPU front to deal with horizontal spinners:
Wiring was the final thing on the list and probably the most faff because of how many moving parts there are inside this thing and the restricted internal space as a result.
The ESC stack made wire routing much more friendly though as it left a central point for all wires to run to.
Once that was done, after some bench testing and hammersaw testing Schism was ready for its first event, which I’ll likely recap in another post but that’s enough waffling for now.
Safe to say this is the beetle I’m most proud of so far and definitely my most fun to drive.
If you read this far then thanks for enduring the horrible formatting and irritating minutia included.