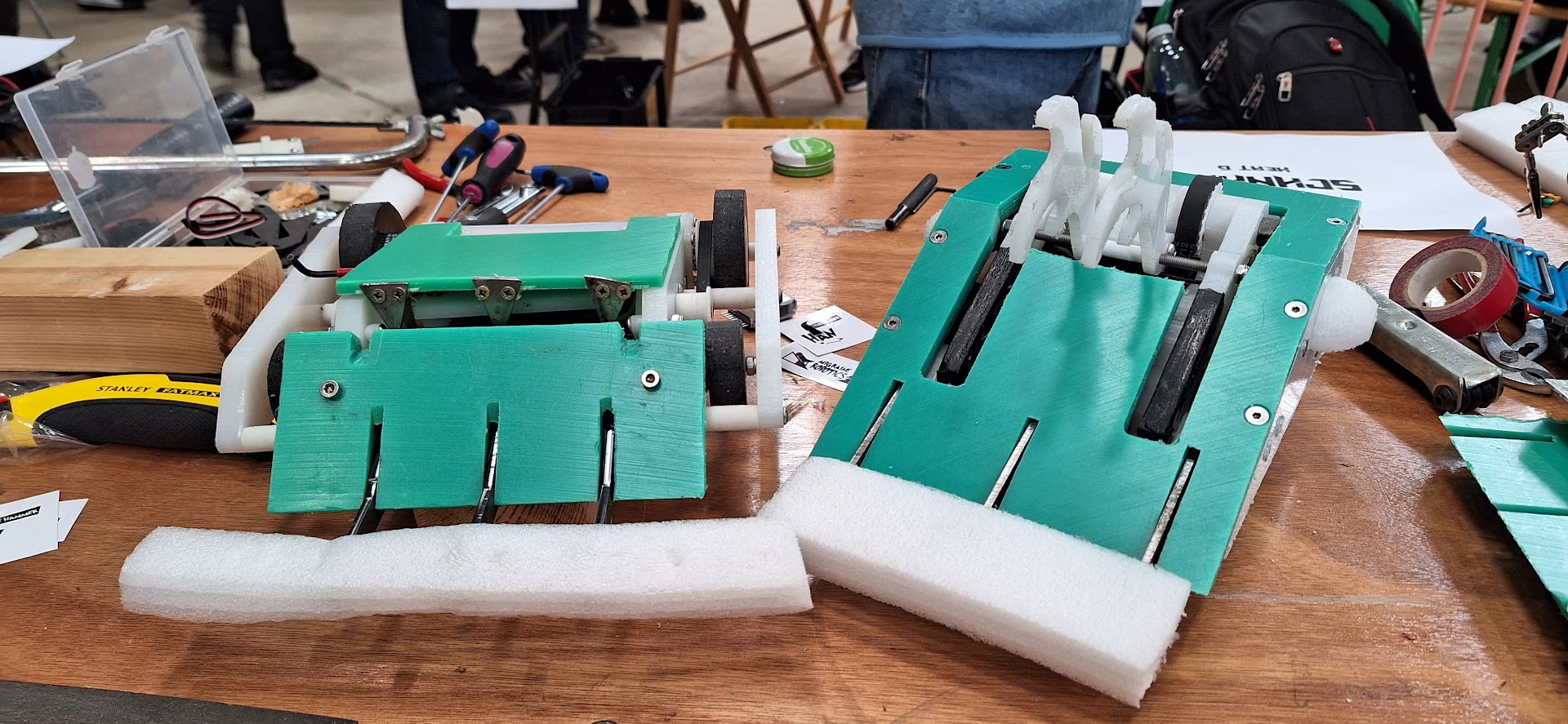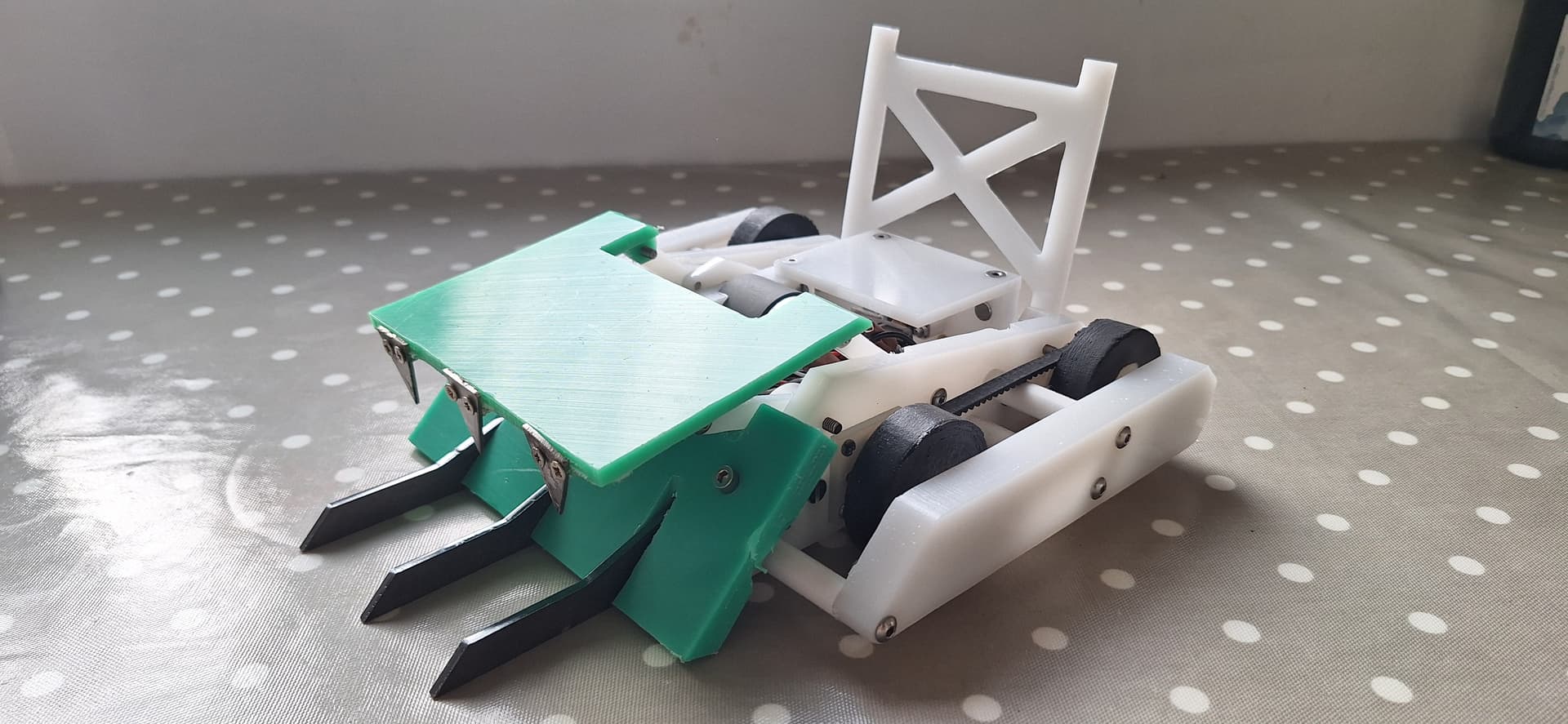
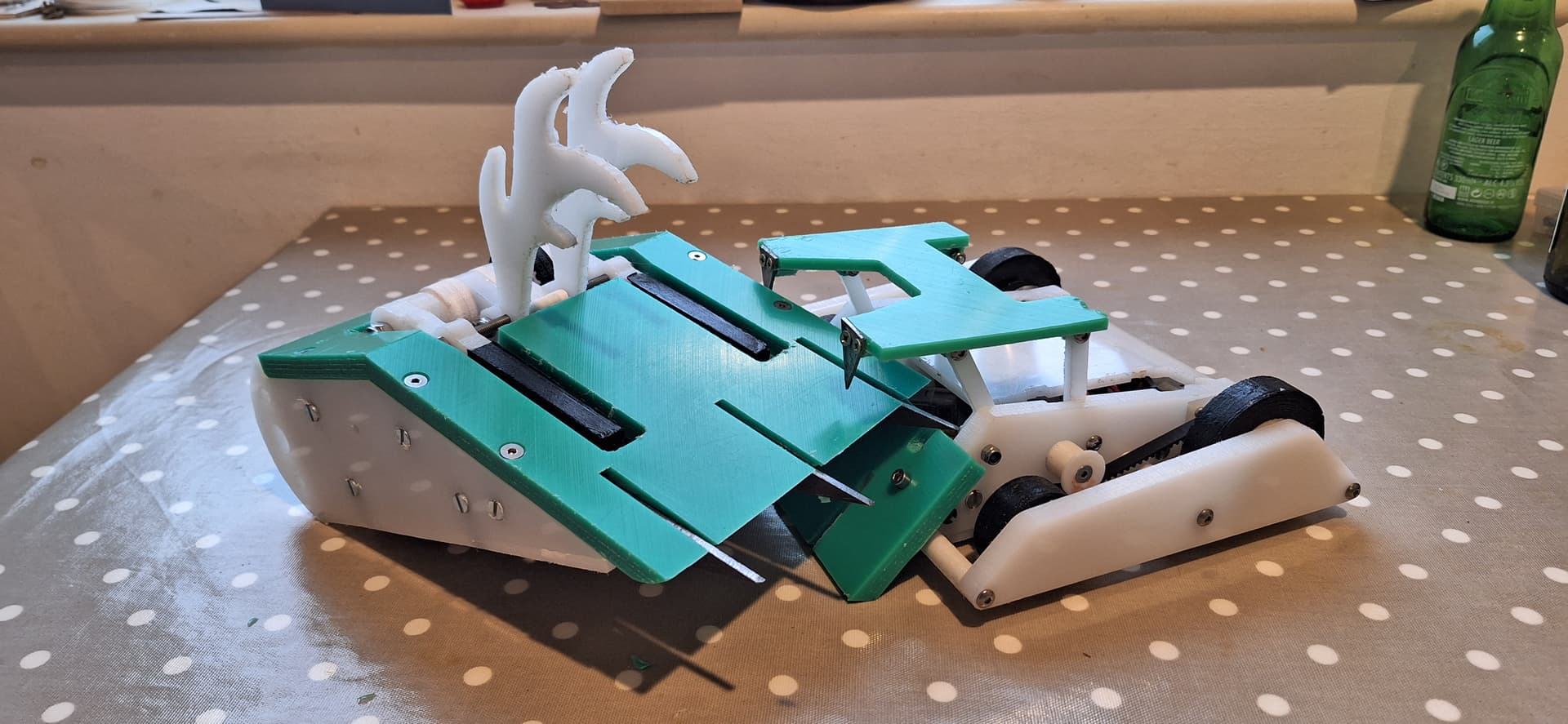
The new (mostly finished) Schnake.
Schnake was an experimental BW slapped together in record time for us to compete with for Robot Rebellion 2022, using mostly the same components as Babróg for convenience. The robot was novel and durable, but there were several issues that prevented it from meeting its full potential. Fortunately, Schnake was already severely underweight, so changes could be made with little concern. To address all of these issues, we decided to do a near-total redesign of the design, to arrive at what could basically be called a Schnake 2: similar in concept but different in many ways.
By far Schnake’s worst issue was in how it handled. The robot was very twitchy, couldn’t drive properly upside down, the hubs kept coming loose, and seemed to constantly drift in one direction, with no seeming way to fix it. As it turns out, the drifting seemed to be a result of a twisted front piece that twisted the chassis in such a way as to keep one front wheel off the ground, but the other issues would need a good quality rethink.

The new 3D printed hubs for the wheels.

A productive tire creation session, complete with a new hubbed design for Babróg.
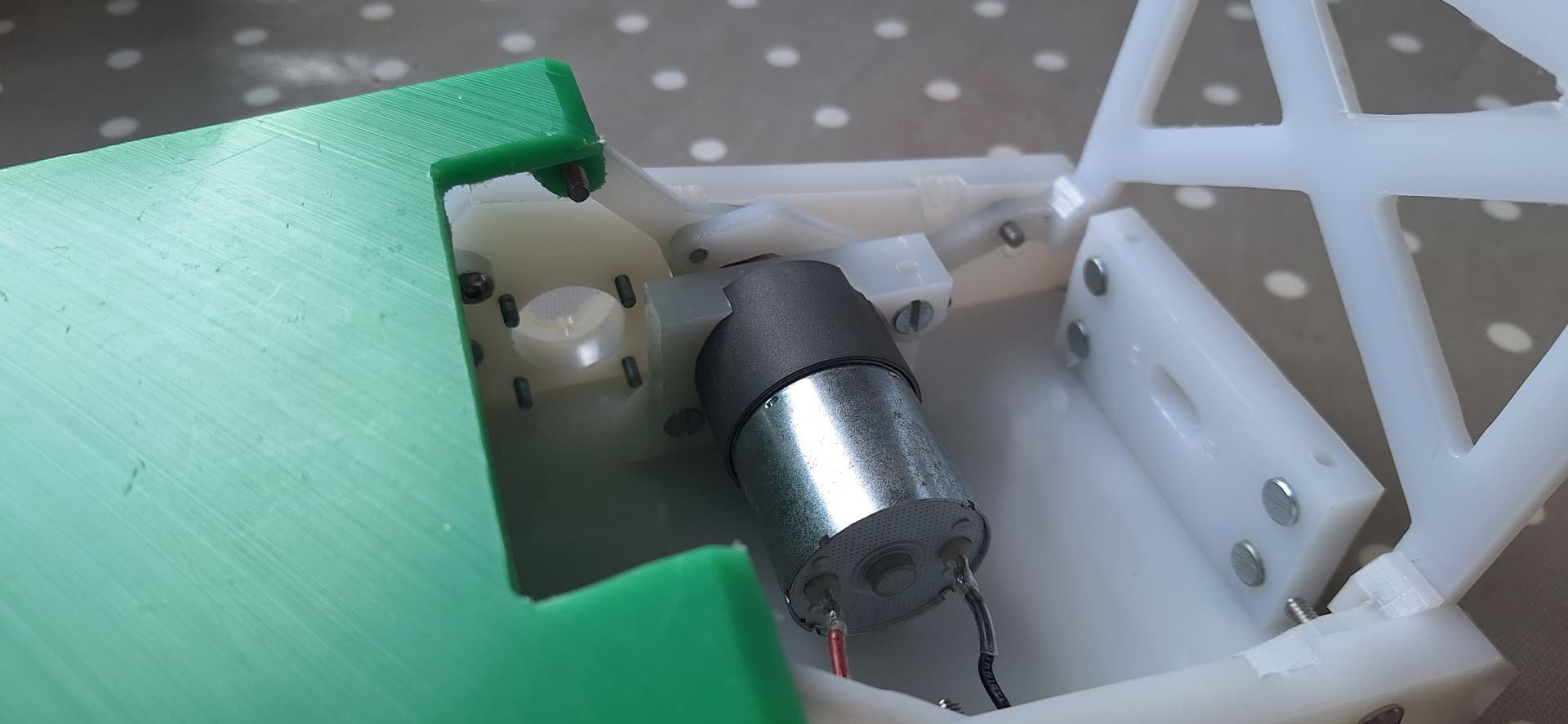
My first call with the new robot was to change the drive from the 1806/22mm gearbox setup used in Babróg to a more conventional BBB 22mm brushed motor setup. I’d lose a bit of the speed and compactness that comes with the brushless drive, but the robot would become far easier to control at slower speeds, which would be critical when positioning the robot for a grab or trying to orbit an opponent. Schnake also no longer uses the 49mm wheels used in Babróg, but now custom wheels, 40mm at the front and 60mm at the back. The increased size at the back allows us to drive more reliably when upside down, and should grant a very slight boost in speed from that lost with the brushed drive. The new larger diameter rear wheels can now fit a proper Pololu hub, which should be far less likely to come loose in a fight.

“Your three choices of tire compound for the weekend are the 60mm C1’s, the 49mm C1’s, and the 40mm C1’s.”
Finding the right sized belt was tricky to ensure a decent wraparound, especially on the front wheels. Unfortunately, my previous belt supplier now charges £30 minimum in shipping for any orders, including two tiny HTD3 belts in a jiffy bag (thanks Brexiteers). After about an hour of searching, I finally found a supplier providing the belts in the right length, only to discover once I got them that I had ordered 9mm width belts, when I can only fit 6mm. Fortunately, within 10 minutes of letting Jack Tweedy know about this, he had sent over a custom .stl file for a belt cutting design, which I had printed in an hour and had the perfect belt for the job.
That’s why he’s the GOAT!
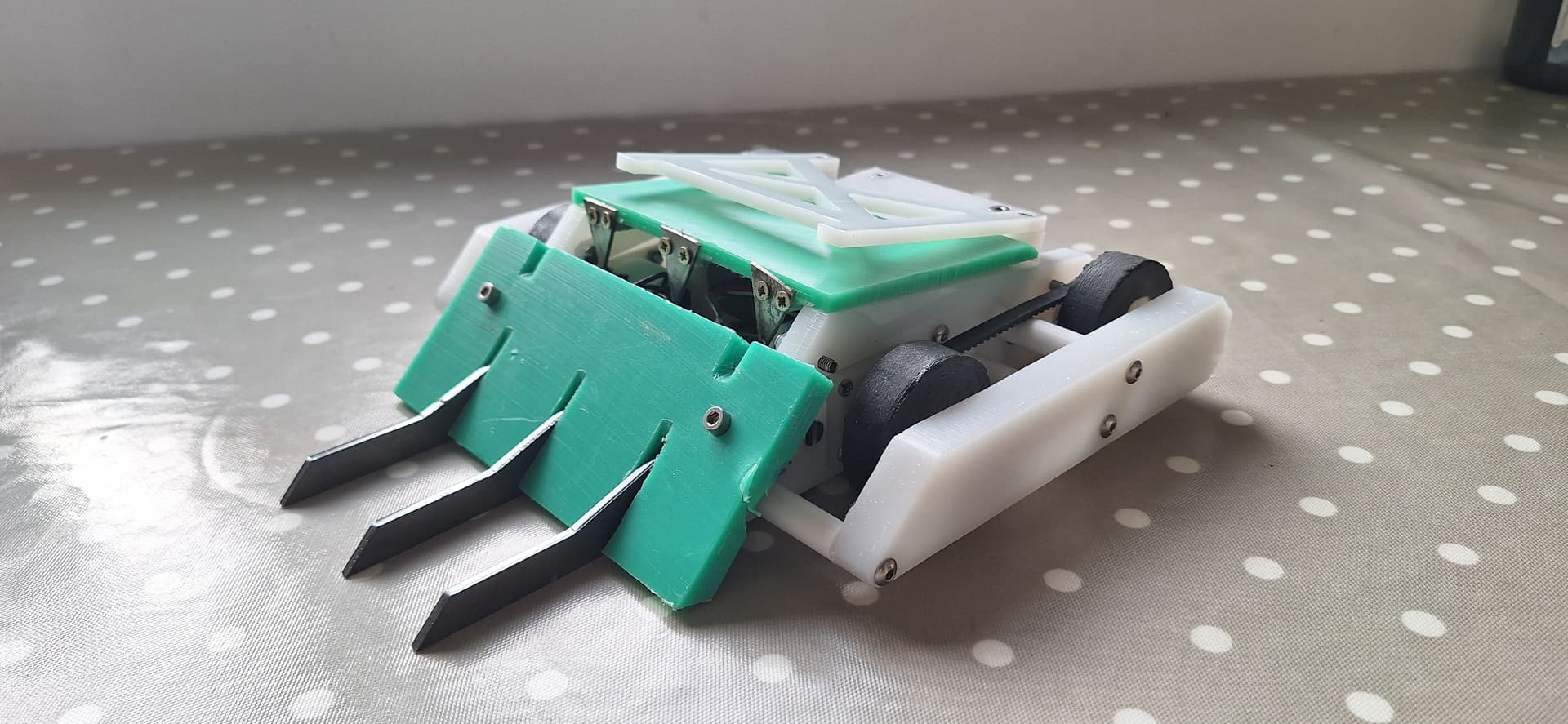
One big concern from last year was how Schnake managed to get stuck under the arena wall so often with its forks. As a result we have designed and ordered new forks with a less shallow angle at the front, which should allow us to drive head on to an arena wall with little chance of getting stuck. The new forks will likely not be as effective at getting under opponents as the old ones, but they will be able to make it harder for an opponent to drive off once grabbed.
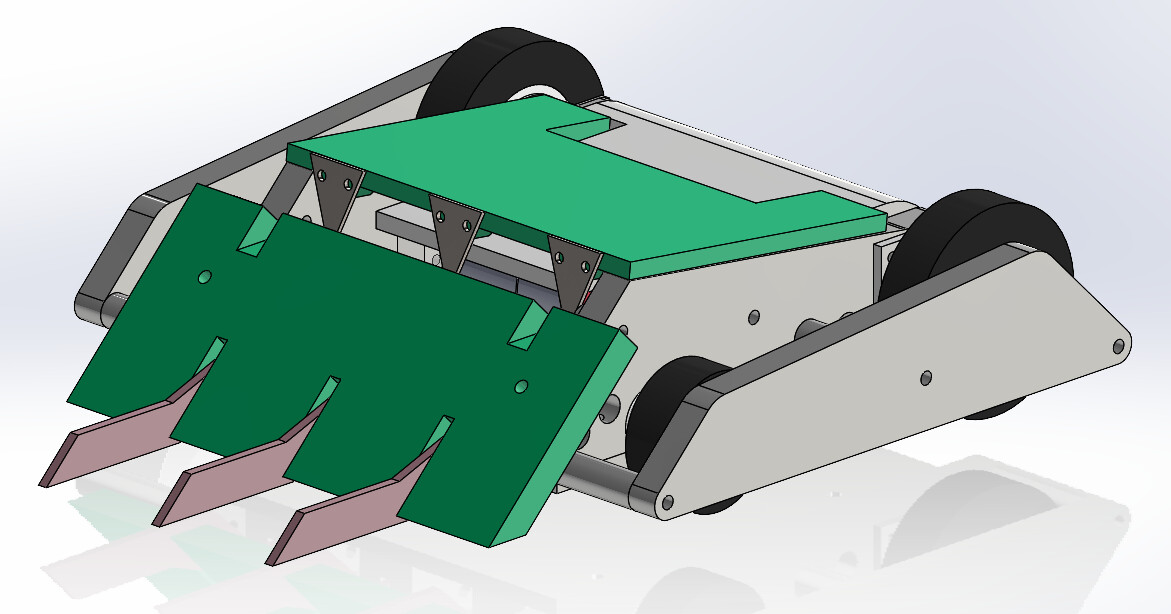
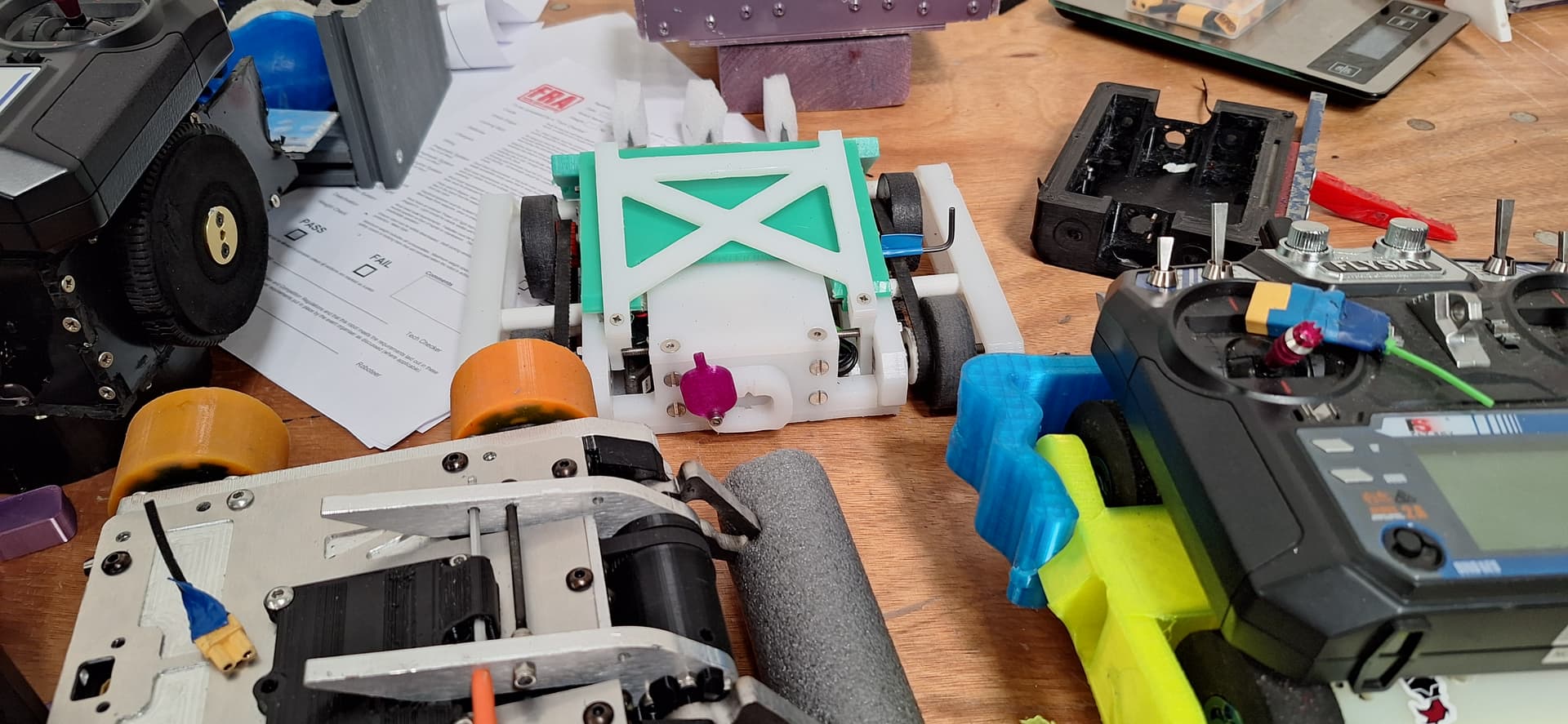
As of writing this, I do not have the forks, I will pick them up at Robot Rebellion, but you can get the impression here.
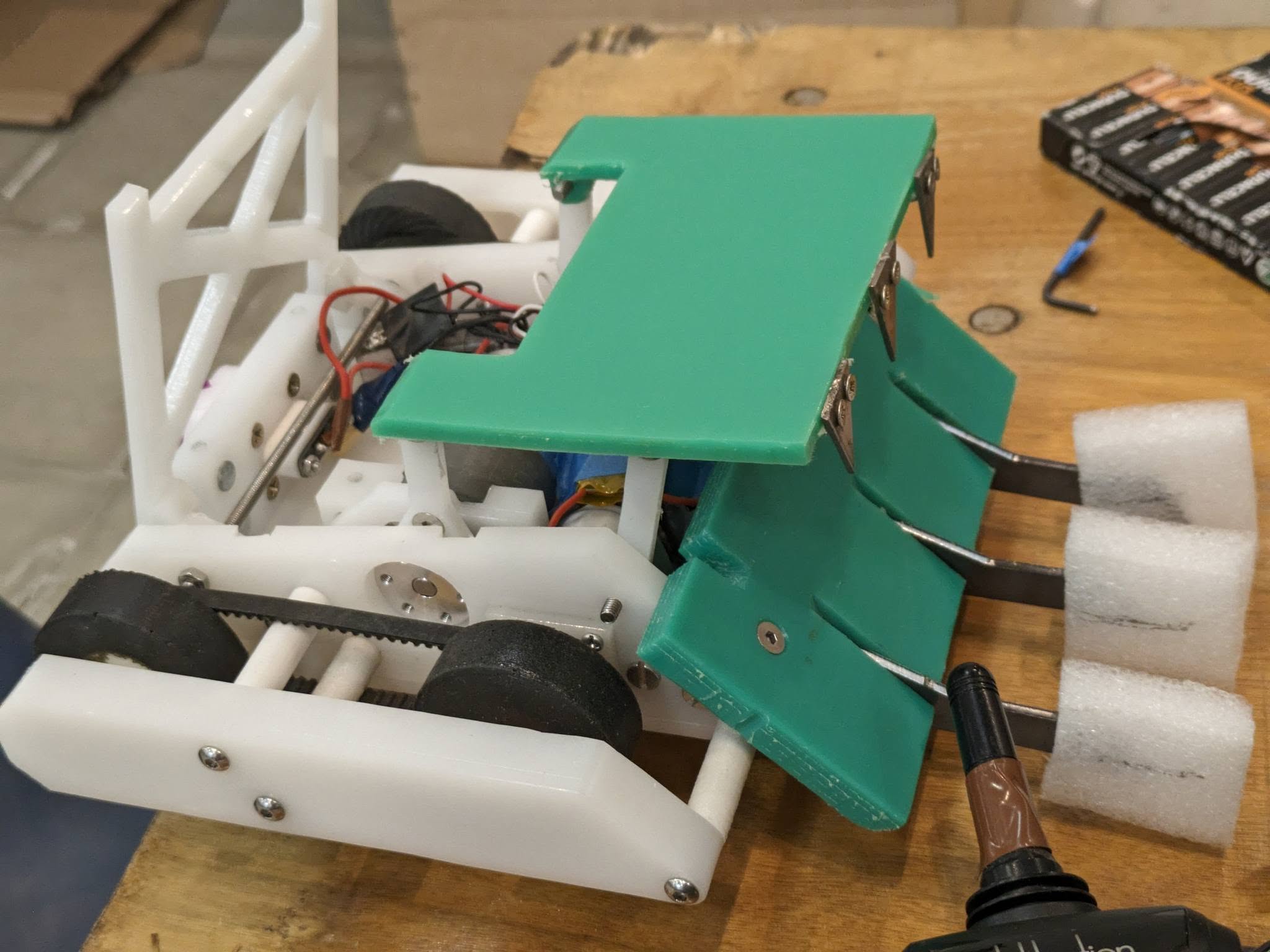
The old servo never necessarily failed, but that was mainly because it was never actually used, and I still have major doubts as to its effectiveness. With this in mind, Schnake now uses a 37mm 80rpm 18kg-cm Pololu motor, similar to those used in other grabbers and lifters in the European scene. This allows me to do a few things. First: a motor setup that’s far less likely to self-destruct and far more likely to grab and hold something. Second: I can now use a simple brushed ESC for control, allowing me to move away from the bulky and complicated dual UBEC setup used before. A new much smaller voltage limiter provides power to the receivers. Third: I will now have the motor connected to a separate receiver, which I will control while my dad drives. This alone will allow the weapon to work much more easily in tandem with the rest of the bot, while my dad can fully focus on driving.
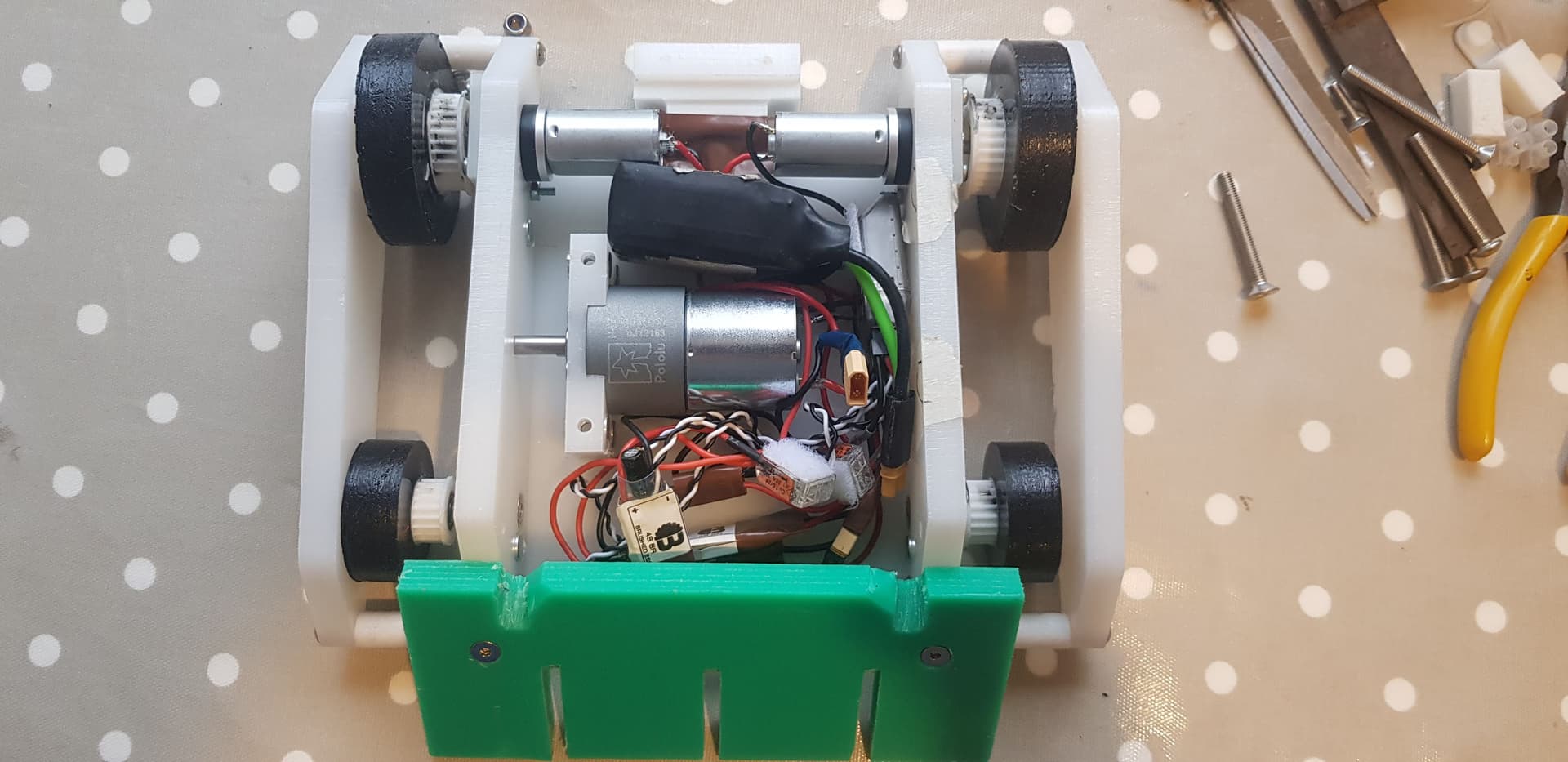
The new electionics smushed in. The battery and electronics will swap places, but everything fits in snugly.
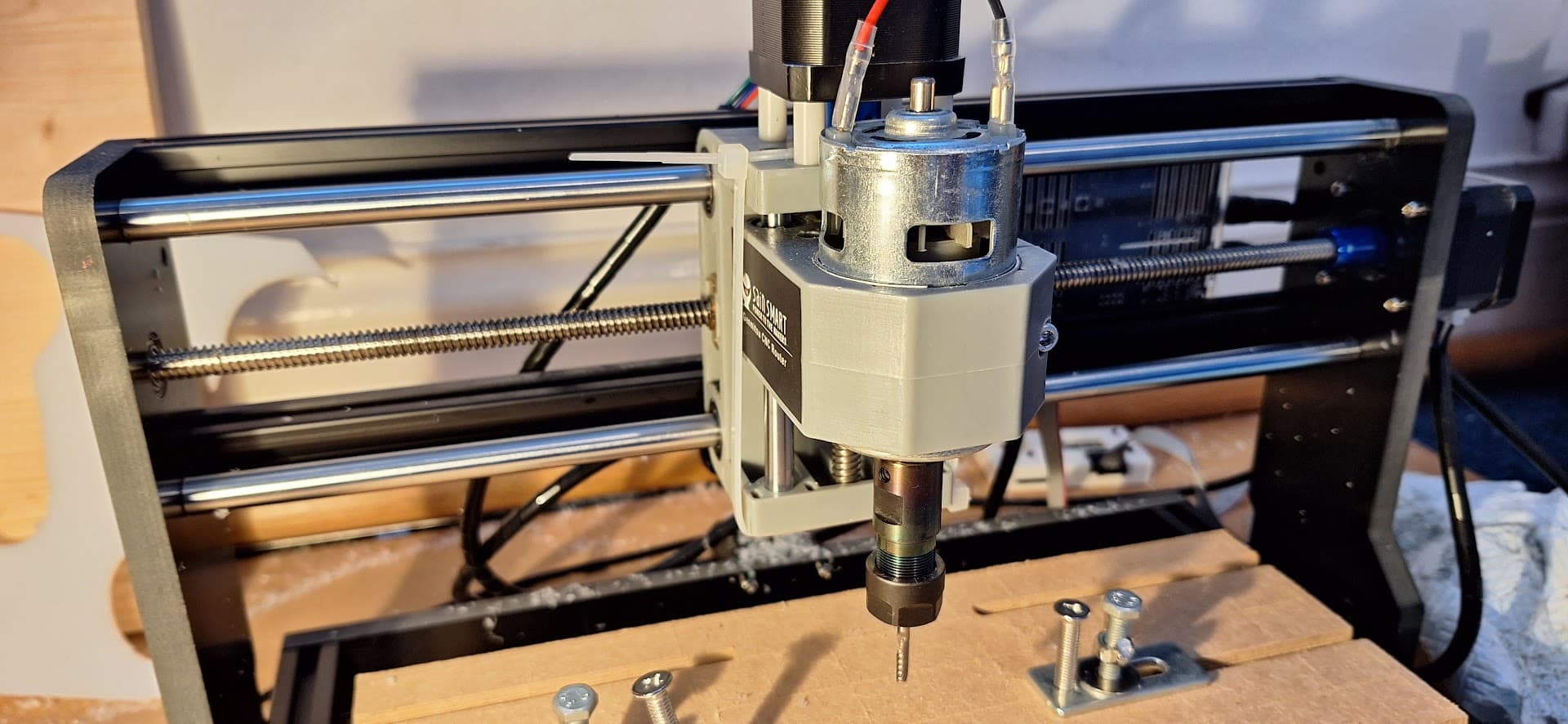
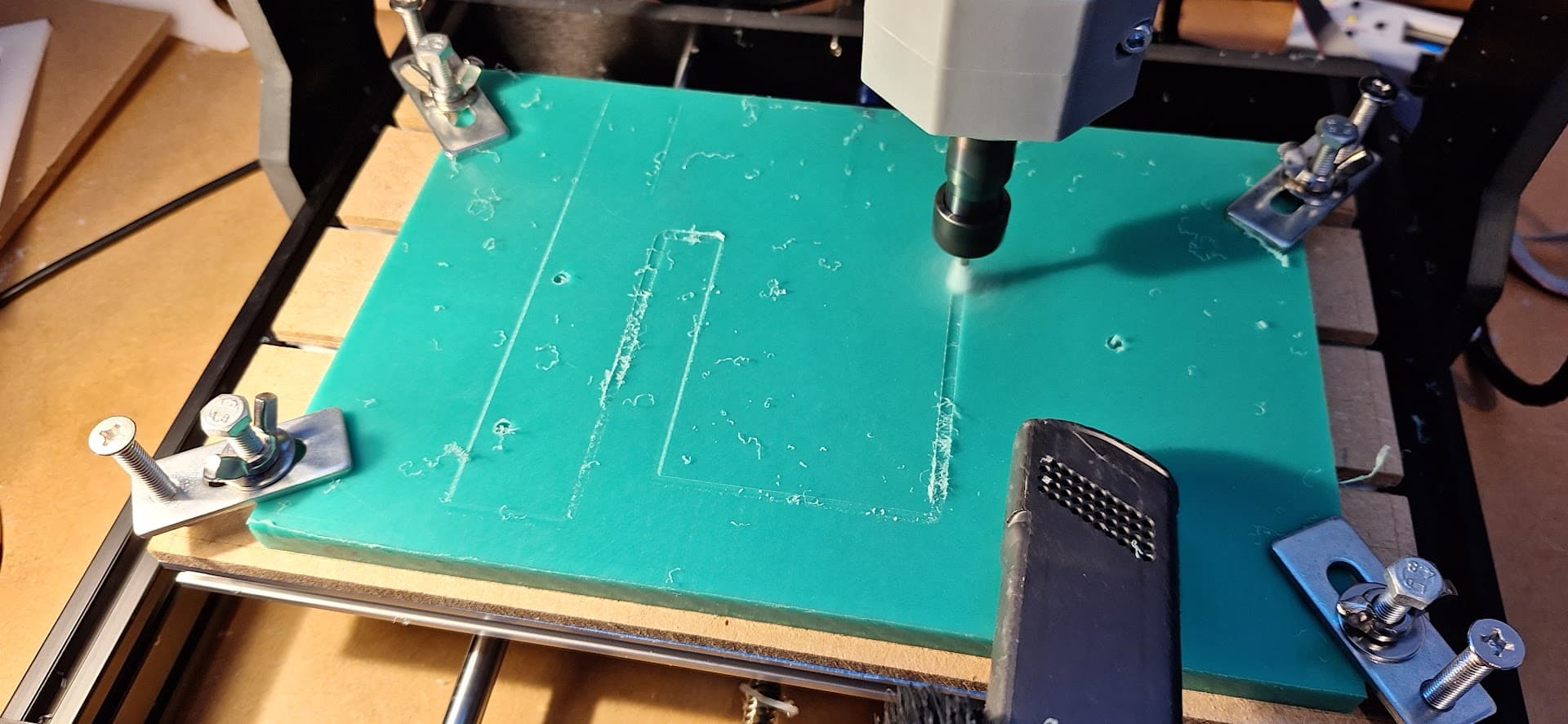
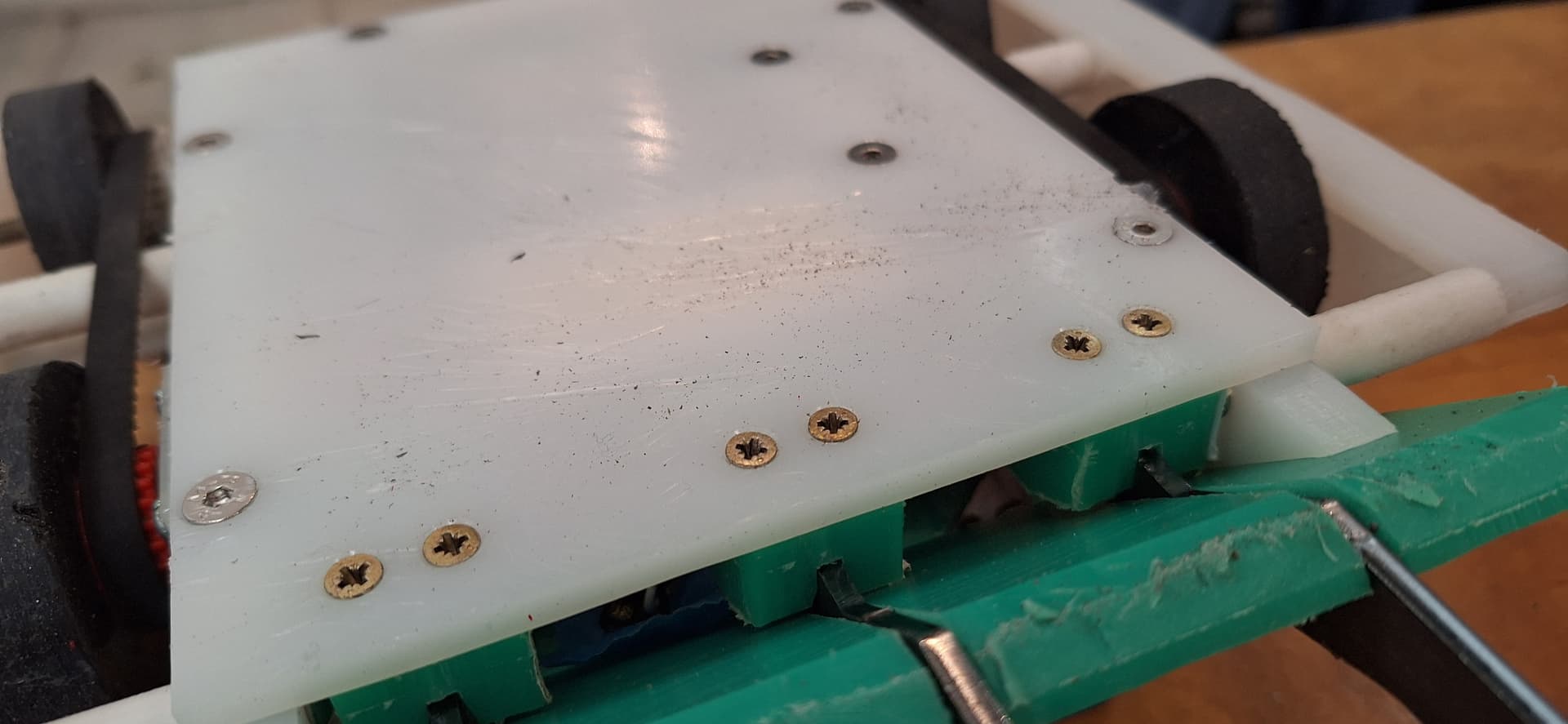
One major issue I struggled with in this design was that my CNC machine started to wear and flex quite dramatically, to the point where I could’t really reliably pocket parts anymore. Most of the pieces were finished before the problem got really bad, but I still had to rely on some good old fashioned chiselling from time to time.

The back pieces on my robot always seem to end up curved. A fiddly one to do, but happy with the results!
All of these changes have resulted in a nearly total rebuild, with very few parts perfectly carried over (most notably are the grabbing panels, simply because they took a ton of time to make and I’m not doing that again in a hurry). All of this is being written before Schnake V2’s debut at Robot Rebellion 2023, and while a lot of stuff could still go wrong, we are confident that this iteration of the design should perform much much better than before!
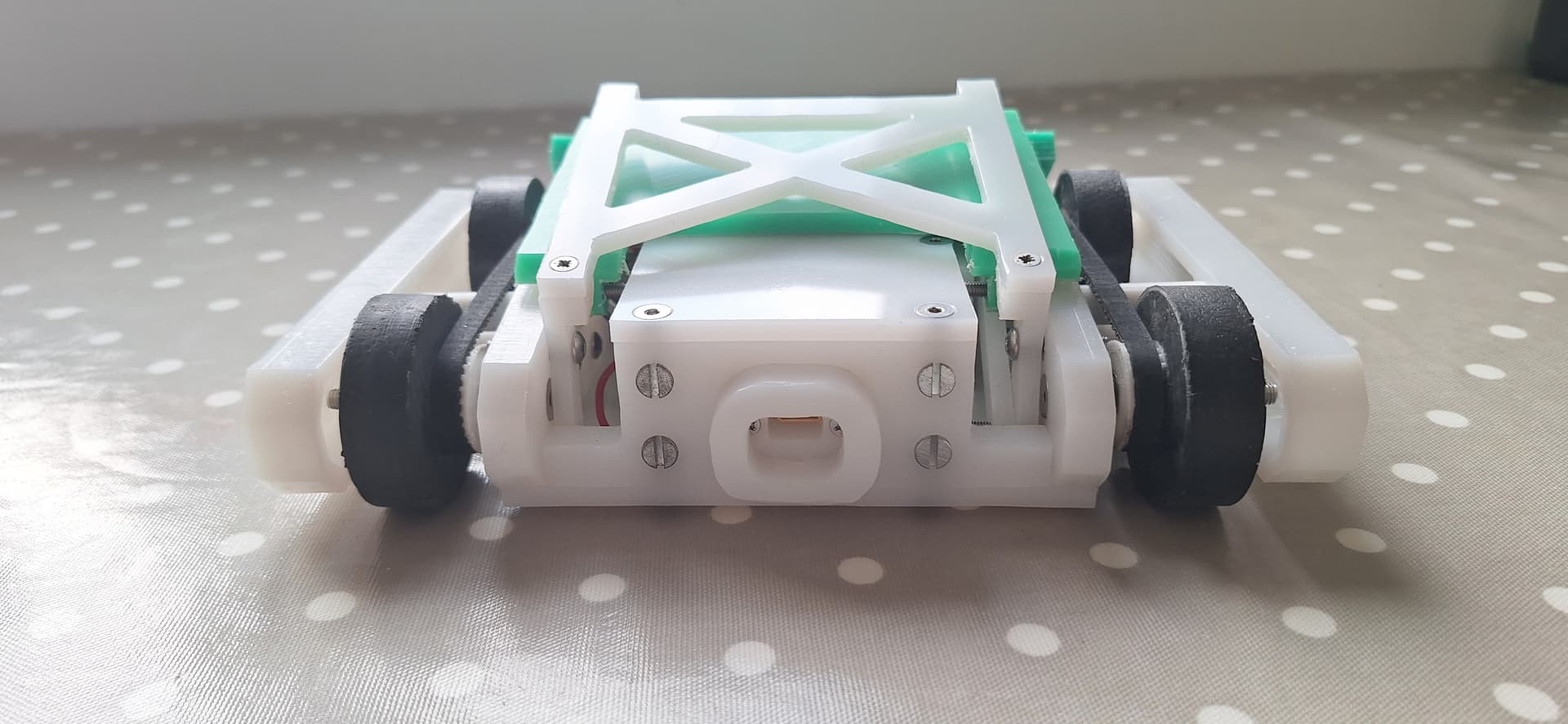
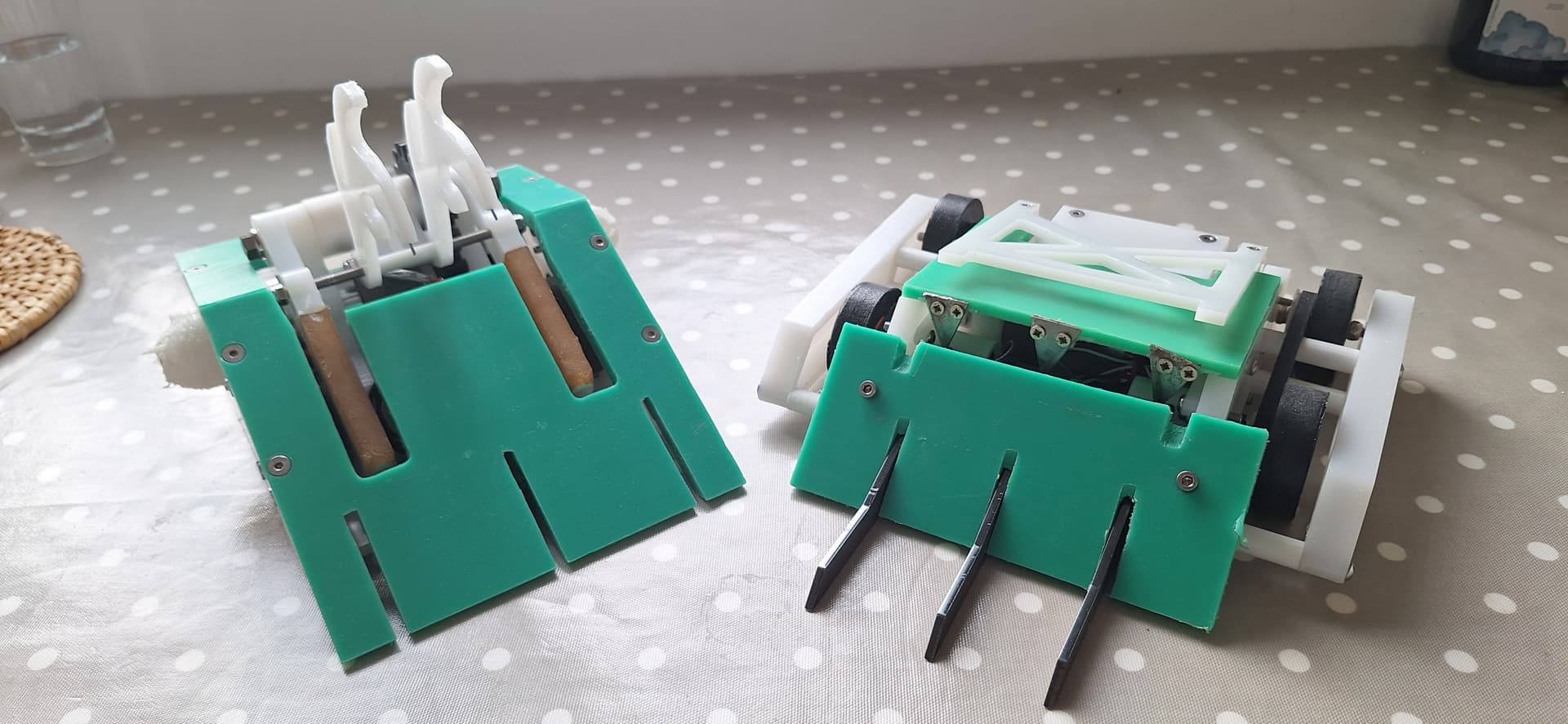
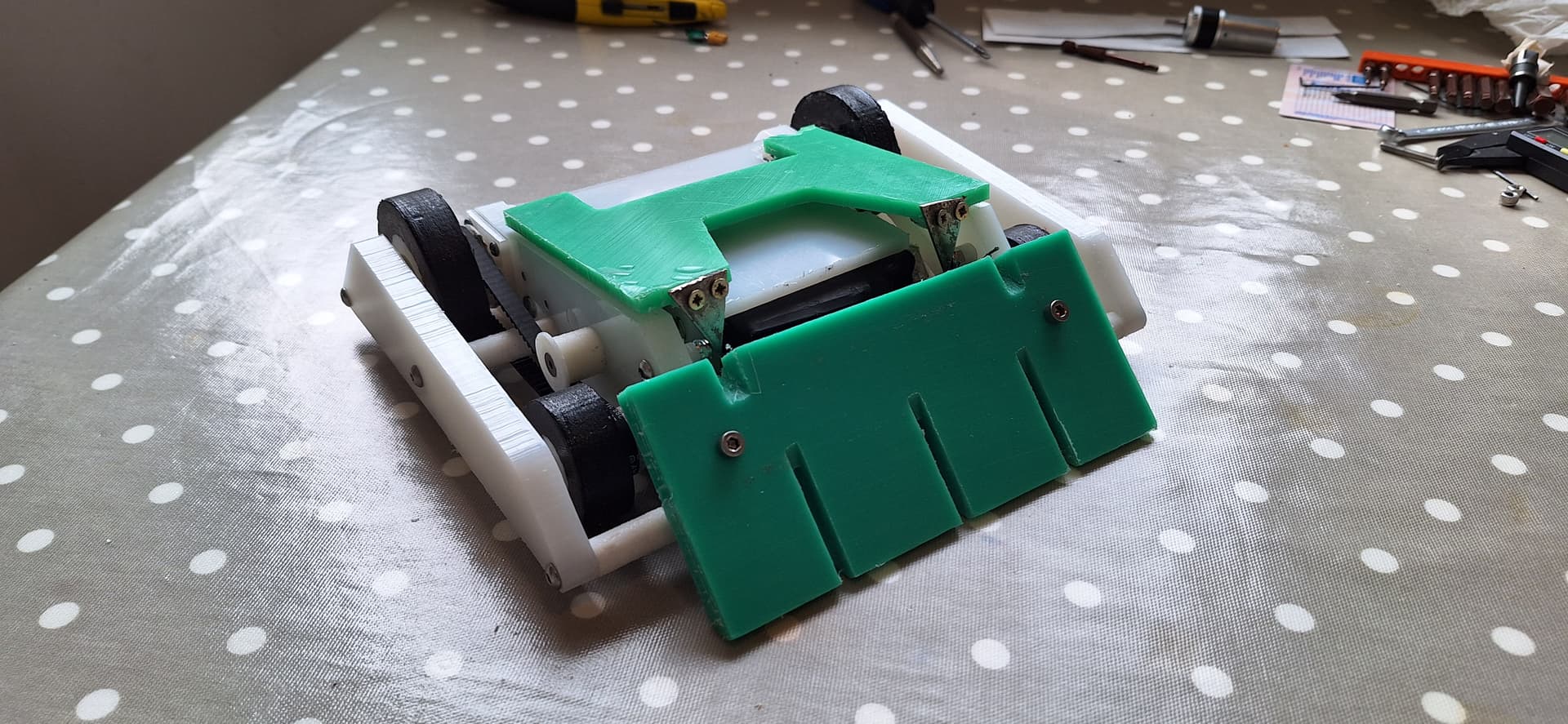
Schnake from the back, now with a much cleaner action on the grabber.
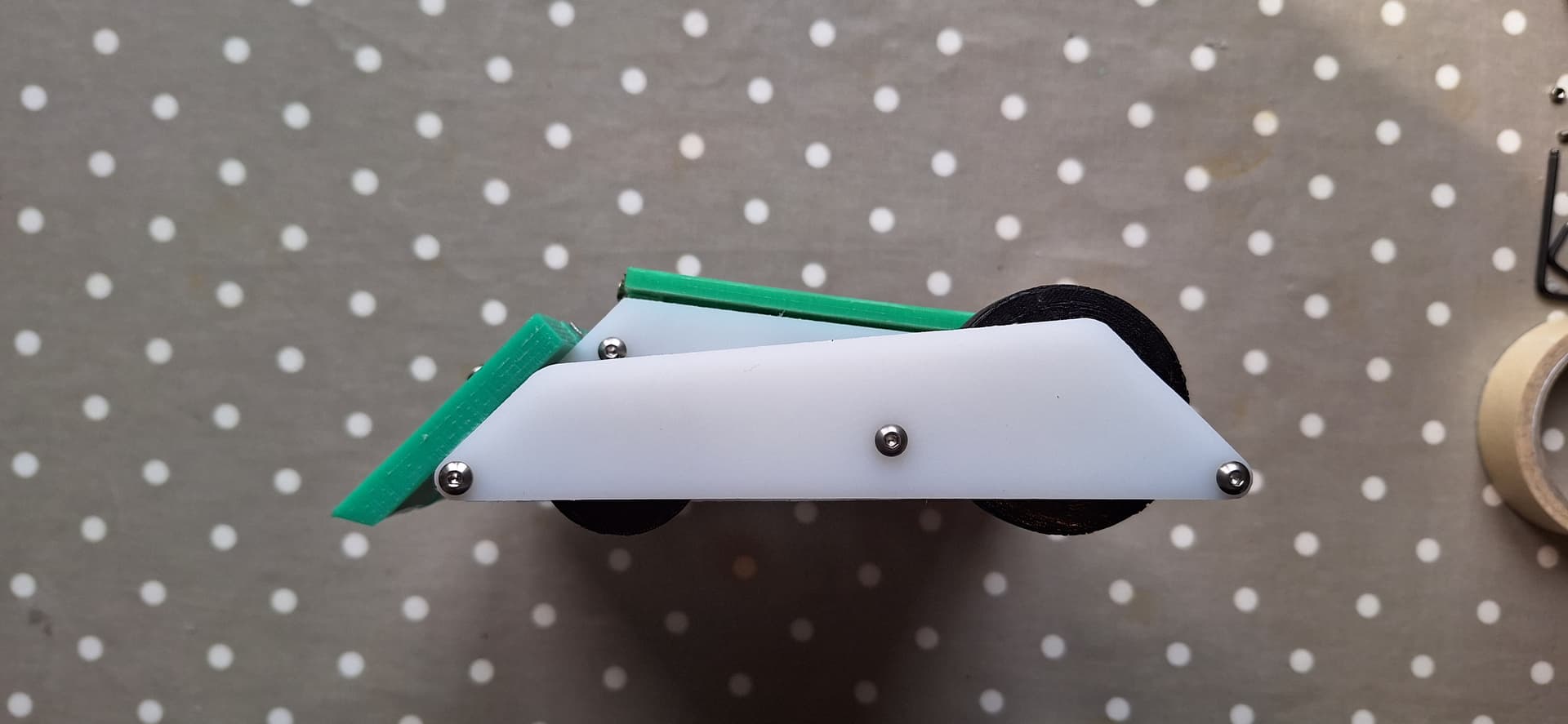
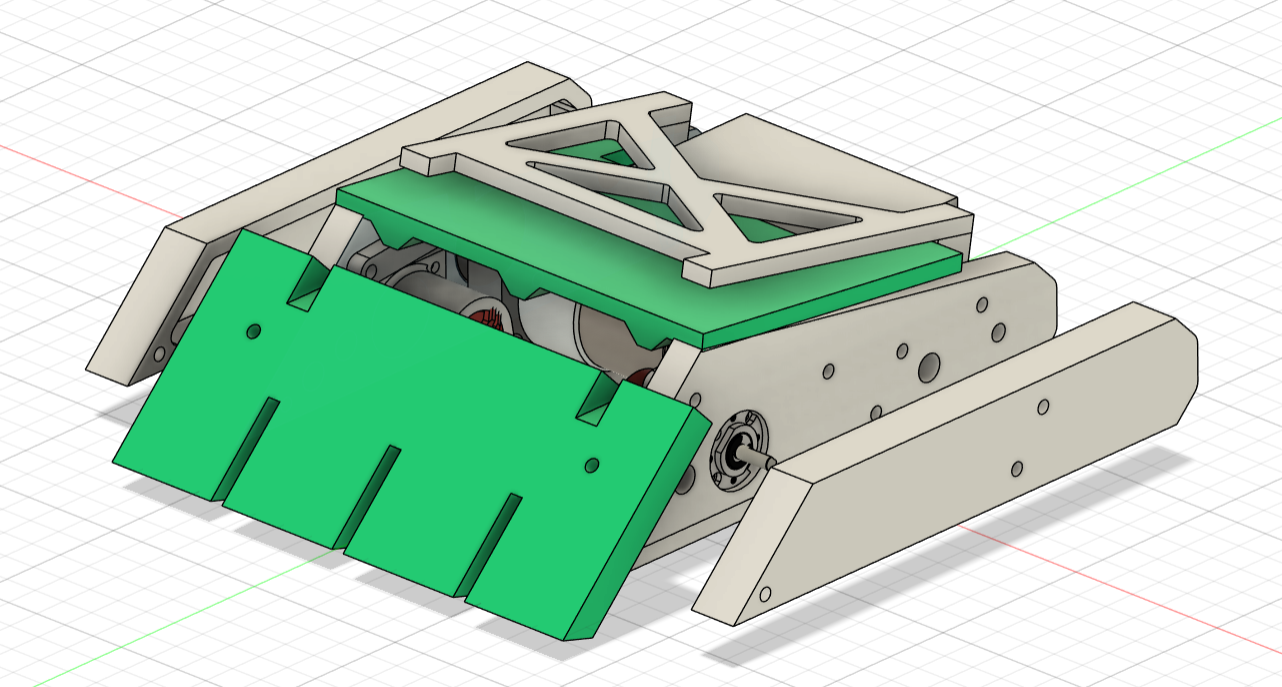
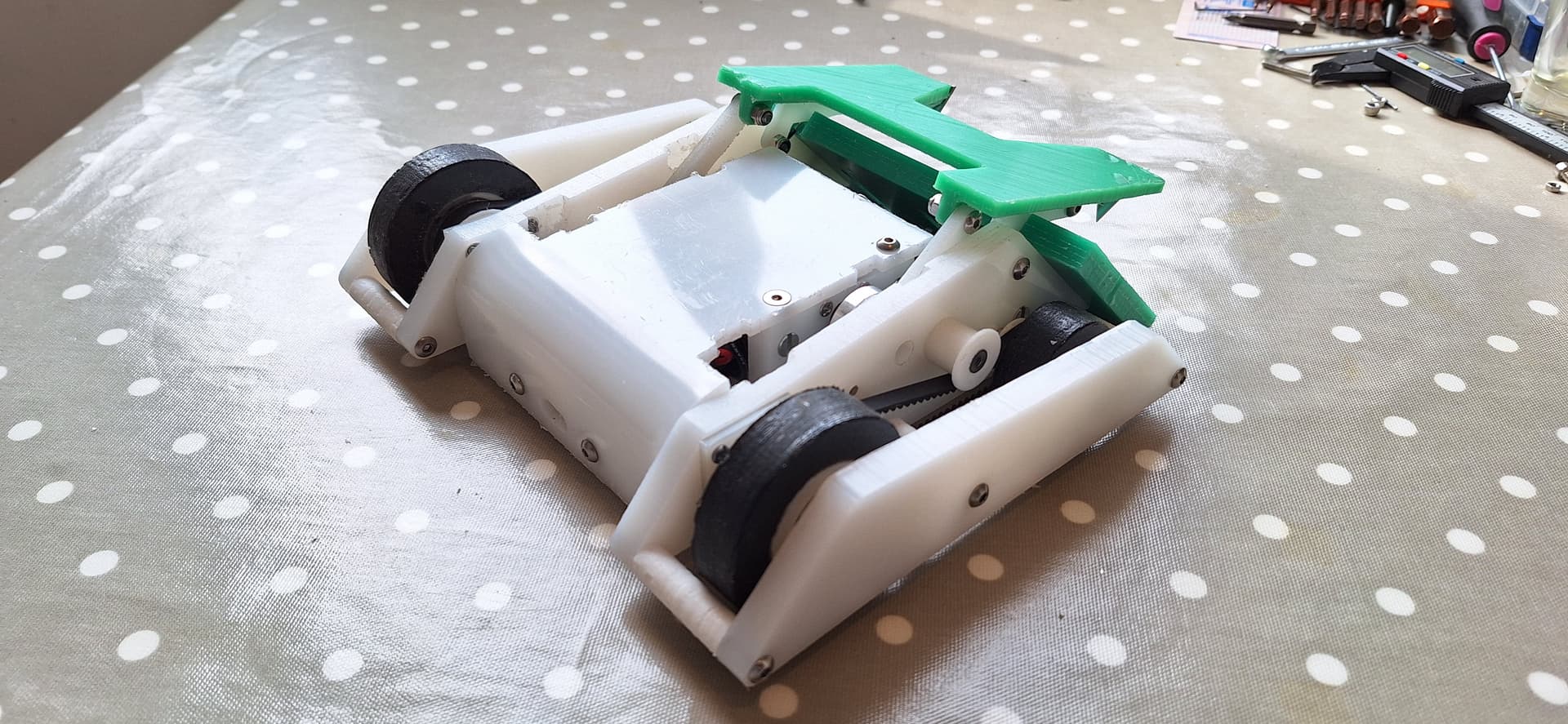
Schnake from the side with its new, more aggressive side profile.
Schnake and Babróg, ready to take on the best of the UK!