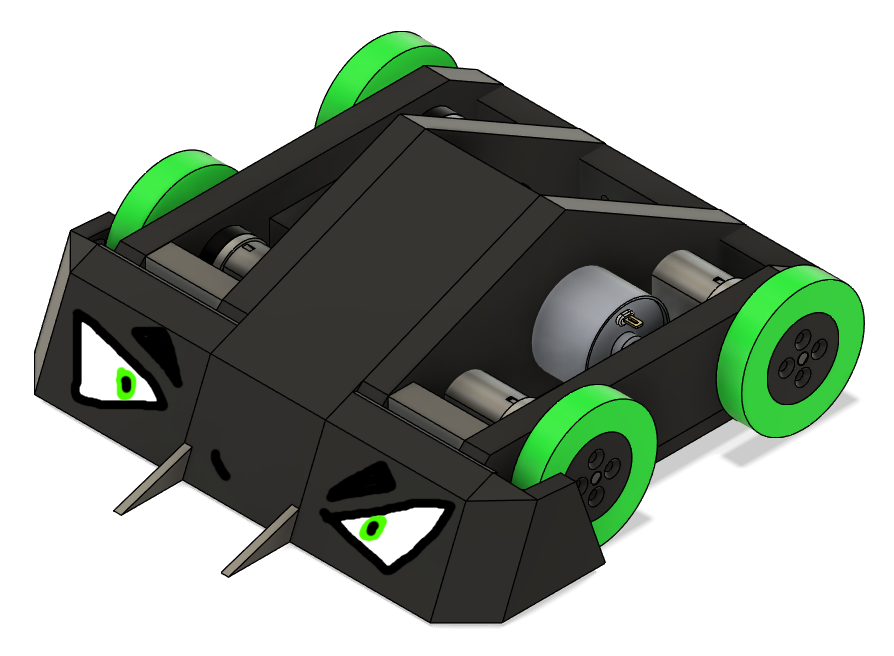
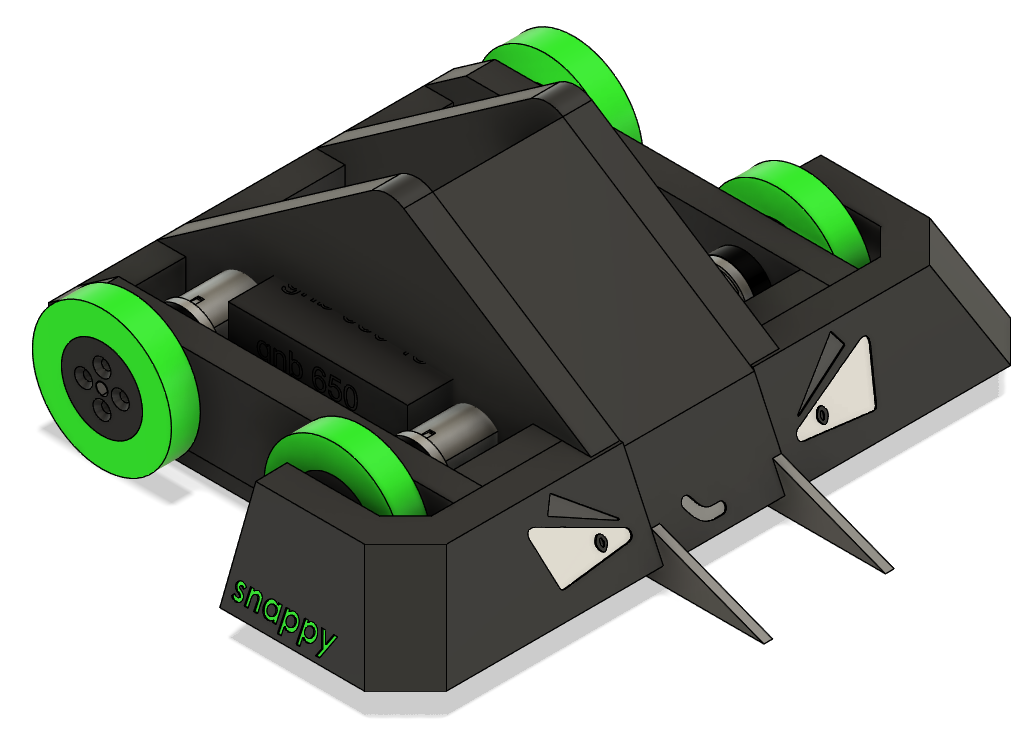
2024 marks 10 years since my first build, the very first Mr Snappy. It’s been a few years since I’ve done a Snappy, when I said I wouldn’t revisit the idea again, but having reset my mindset on robots (eg: screw tryharding, have fun and build cool), I’ve been having thoughts about how I would design a modern version, thinking about using more bop! design language and combining with something similar to Blip. Spent a few hours committing some ideas to cad last night after work.
Starting from scratch to make sure all the dimensions are as suited as possible.
Still very much a rough draft and may not ever happen as I’m having so much fun with bop! but thought it’d be fun to keep a log of where it goes, if it goes.
I’d be really interested to see how you’re able to utilise Bop!'s design language whilst maintaining an important distinction between the two. Knowing the context of this initial design, it made a lot more sense as to why it looked so similar, so I’m definitely interested in seeing the evolution.
With a Blip style setup on your flipper, there’s probably going to be some level of having to play the ground game to get some kinda utilisation out of your weapon. Would be super interesting in seeing that approach towards that challenge given your current mindset on that kinda stuff.
Somewhere between not finding time to participate and some of the ““fun”” that comes with being an organiser, I’ve really fallen out of love with the game over the last year, probably even longer.
This was something I forced myself to start; a simple construction with no ‘new’ knowledge really required from me, in order to actually finish something without falling into more of a funk when hitting roadblocks.
Couple of custom wheels, repeat pros, some forks, some magnets and an old servo. I’m hoping to commit to this and get it done for pub beetles in July (I’d love to come do Burgh but life is expensive, sorry boys).
Is it competitive? No. Is it hopefully the spark I need to rediscover why I like this hobby? Hope so.
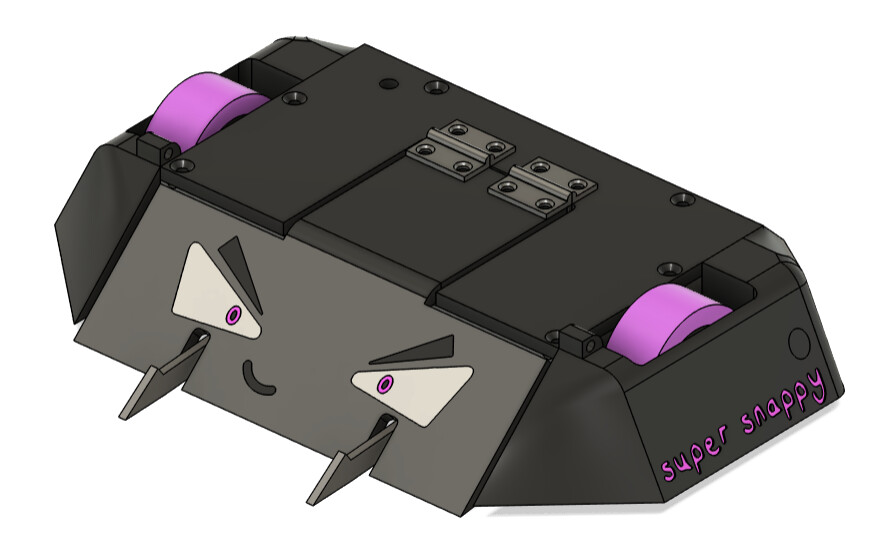
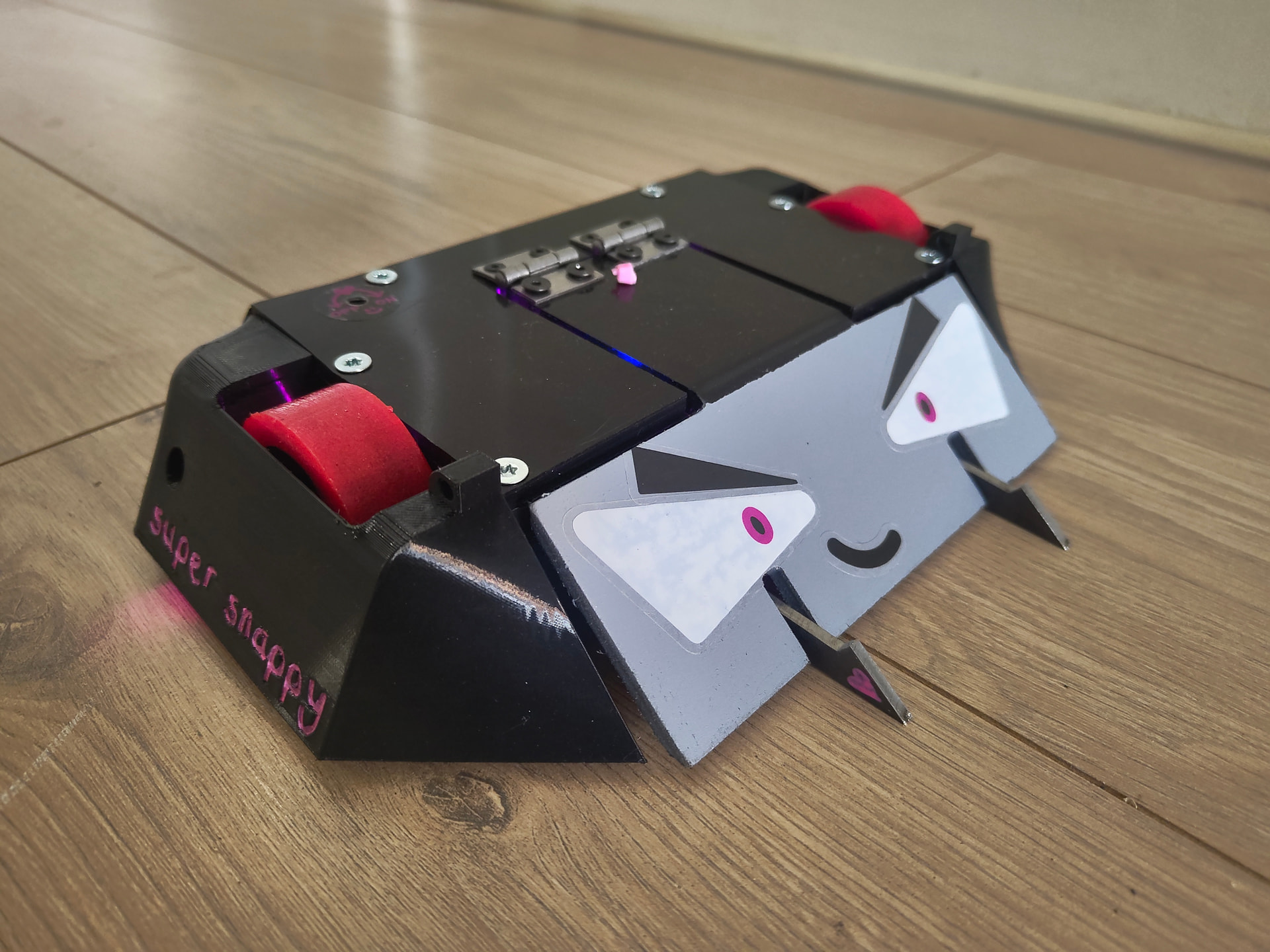
I thought I’d give a little diary of the build of my most unsuccessful success story, Super Snappy '26. Why do I say this? Stay tuned..
The design above is roughly the one that went into production. Unseen there are some skids at the front of the chassis providing contact points and housing magnets. These would last 1 fight at MITE before being removed. For reasons to come.
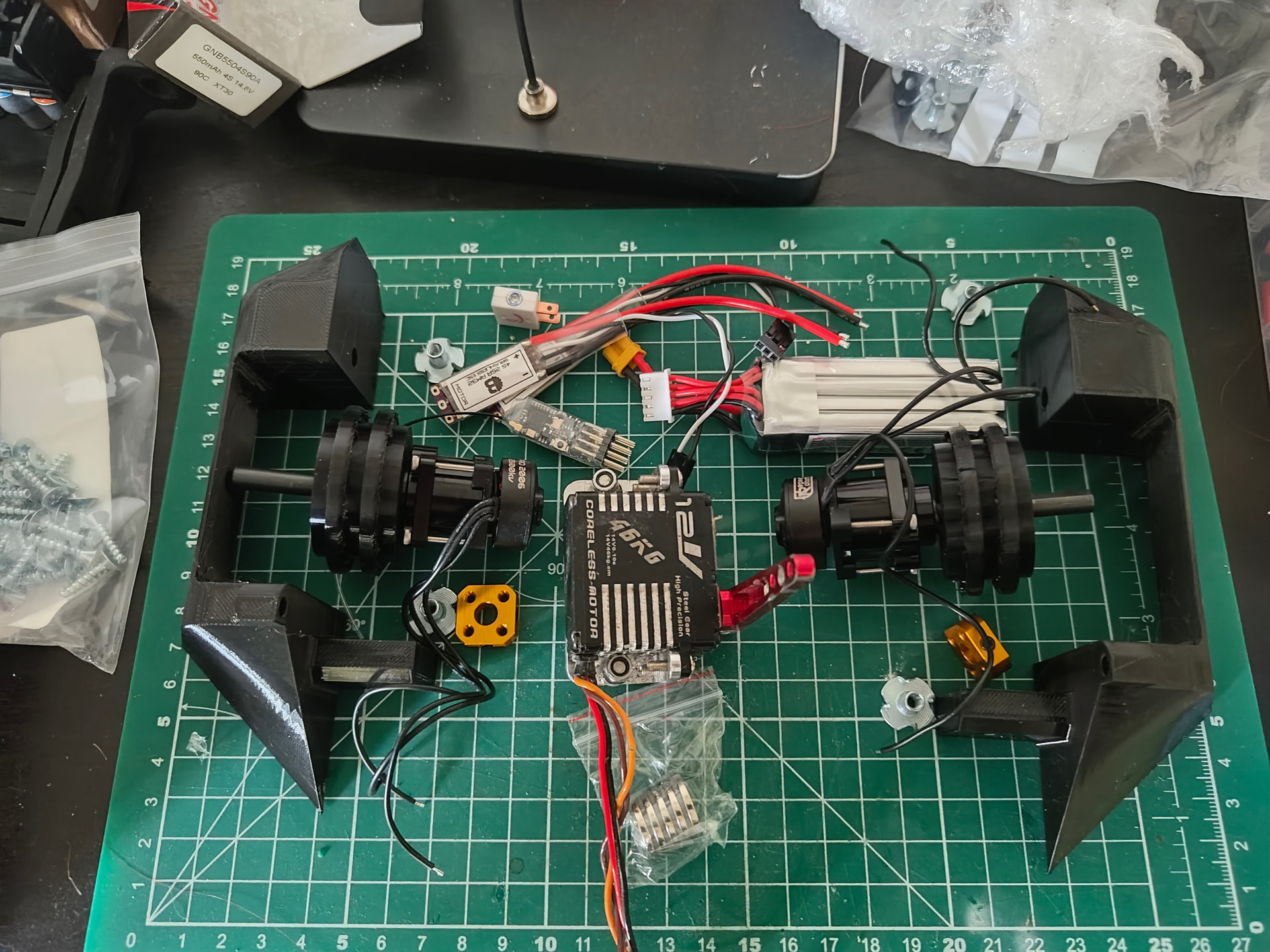
After a few print and part deliveries from @Joe this is what we were roughly working with internally. All new internals from bop!, rare for me in my habit of recycling and reusing old bots. This meant I could keep bop! running and upgrade this in lots of places, plus my first bot with brushless drive necessitated a big move regardless. The servo is the same one that has been in all the post pandemic Snappys and Mr Cat’s Mouse Houses. Okay so I did recycle. Sorry.
One design choice I’d like to point out in order to thank someone is the use of tee nuts inside the chassis to hold the printed side pods on. This made maintenance so much easier and is just part of the reams of advice @Jack offered me while we both tried to force myself over the line from scared to design to megapints of actual builds. Thank you pal. Even for all the warning signs about weight distribution that turned out to be totally true but we were too far down the line.
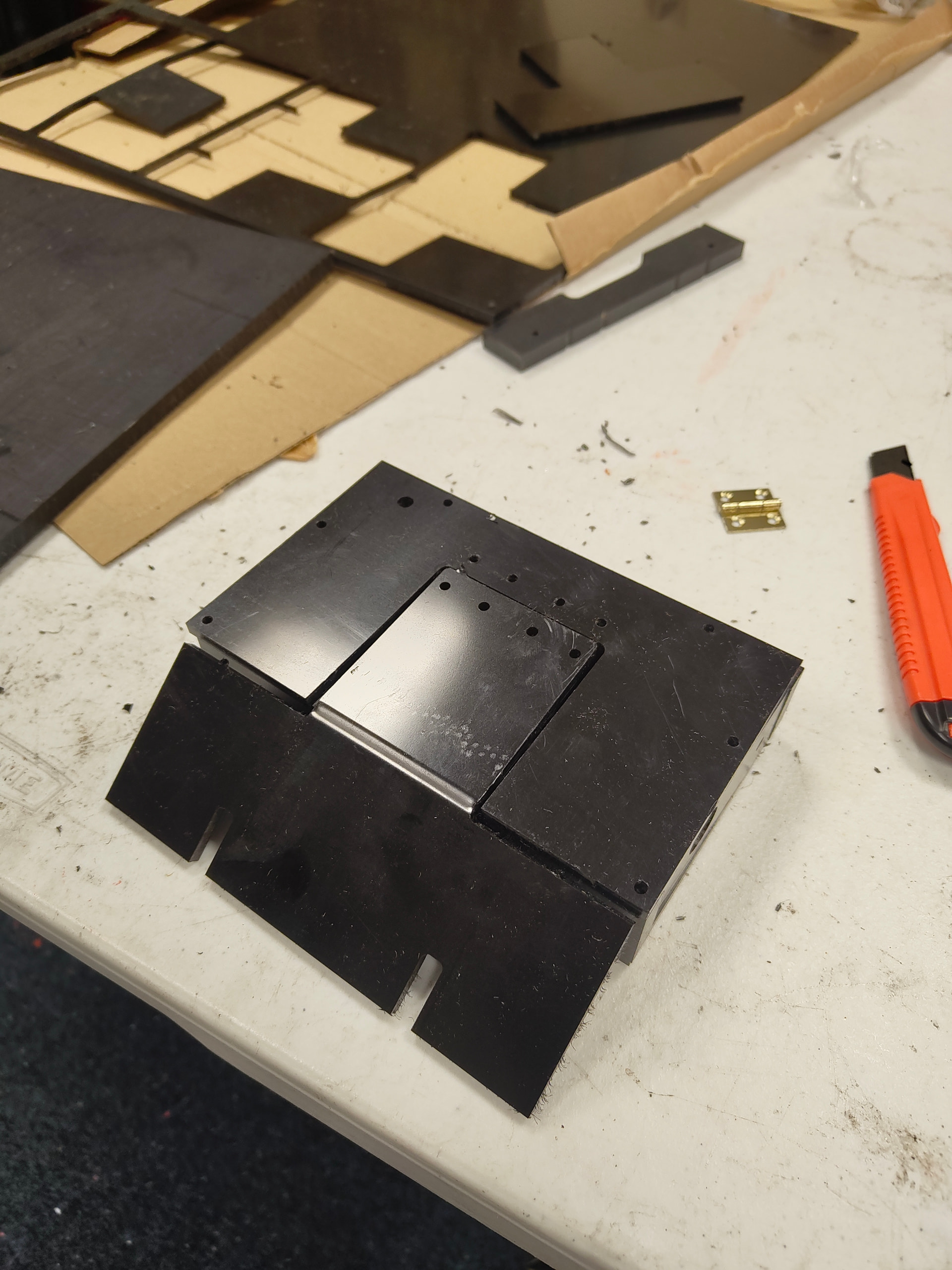
My last day spent at our now ex-workshop was CNC day for Snappy. The front panel being 5mm HDPE seemed to surprise some based on the previous 2mm ti wedges of old, but this is way cheaper, easier to fabricate and easier to replace, being one with the top lifter panel.
Tiny notches in the 10mm side walls and a printed jig allowed me to drill the pilot holes for all the screws in all the right places first try, and it came together pretty neatly. These screws are the thread forming screws for plastics from my favourite provider Westfield.
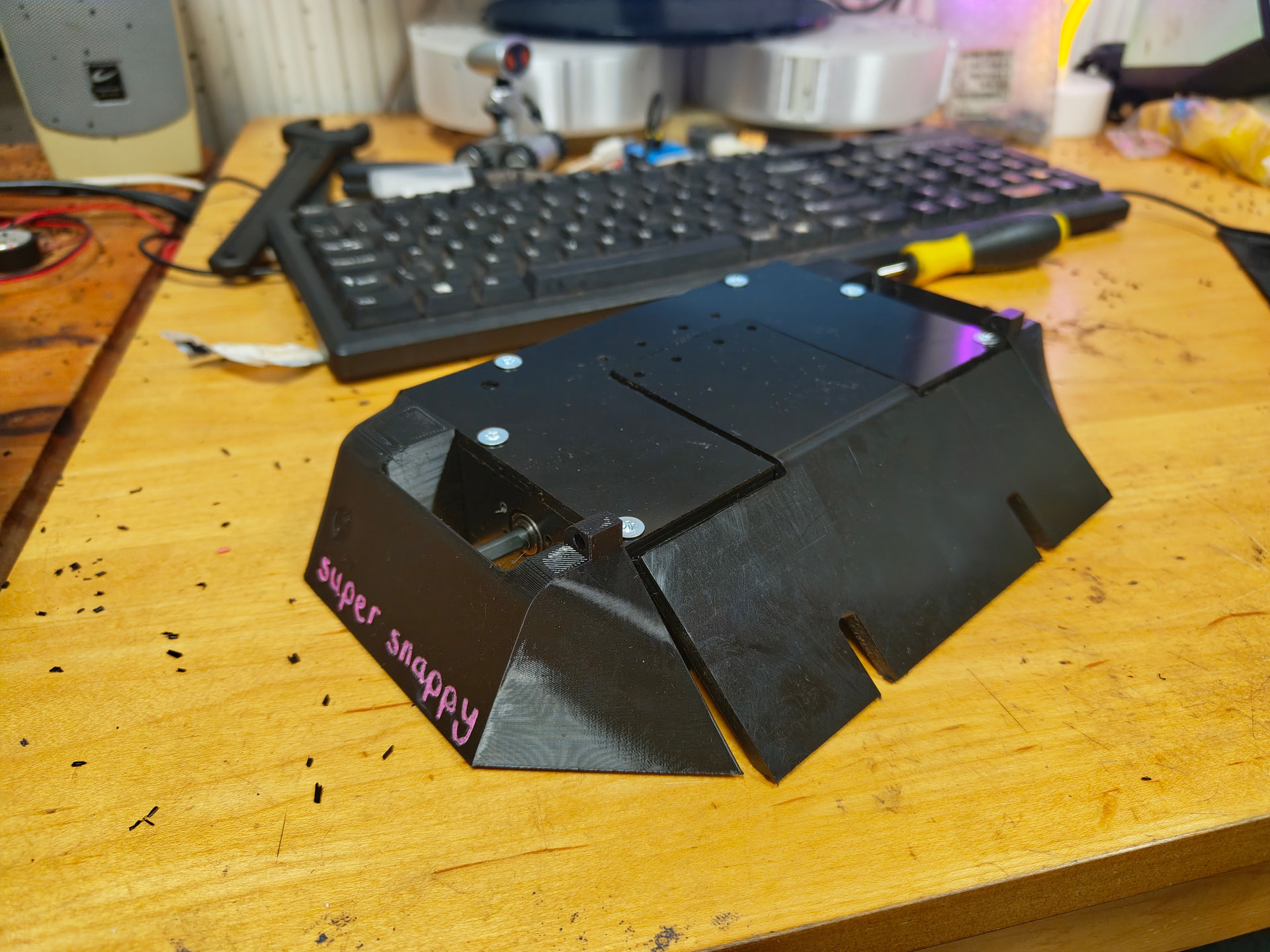
I could’ve kept it black but I felt the old colour balance of having a ‘metallic’ grey wedge set the bot off nicely, so I took a bunch of HDPE painting tips from @Nick_DSC (who I’m going to out and say should copy and paste those tips as a comprehensive guide to painting HDPE, cos it made the world of difference - thank you Nick!) and got to work. I had intended to add a metallic colour over top but ultimately decided that a few layers of the grey primer was a nice look by itself.
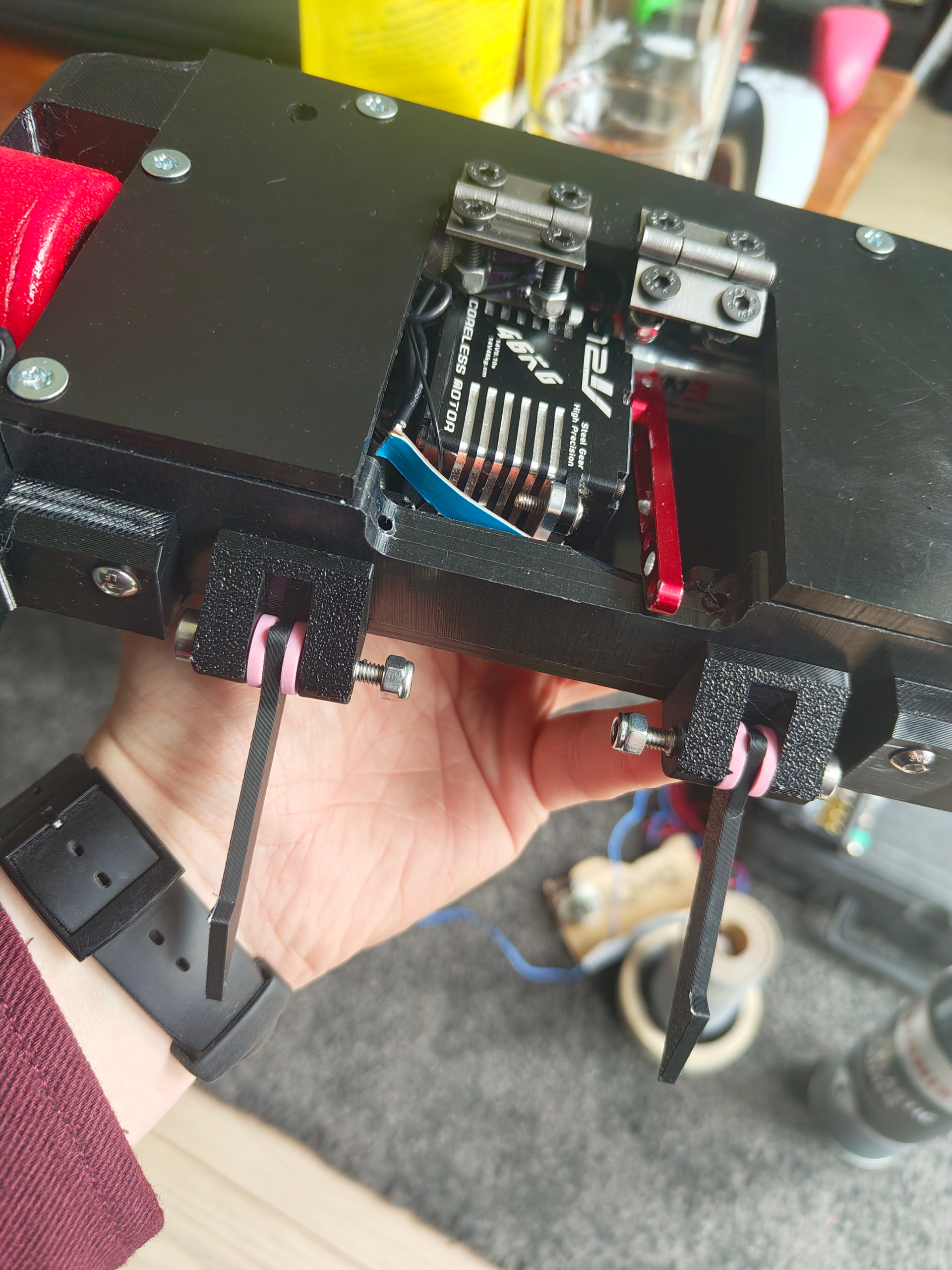
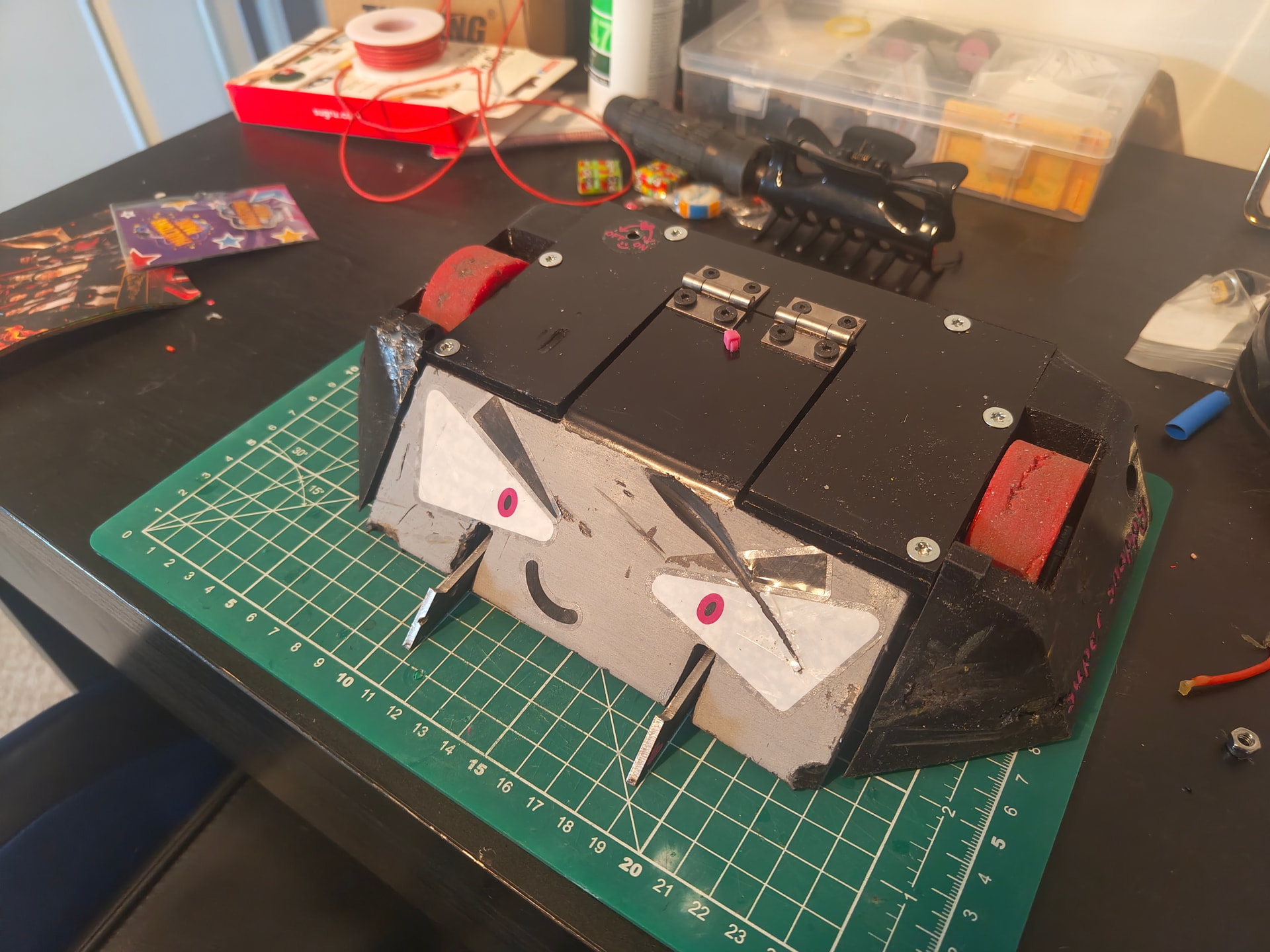
Here you can get a vague feel for how it’s (horribly) laid out. The servo lies directly underneath the hinged panel, while the battery and electroncs squeeeeeeeze into the back and the Repeat Pros sit under the sides. Also here are my fork mounts with placeholder printed forks. These mounts are clamped into the chassis through gaps in the front bulkhead and held in place by the baseplate screwed in around them. While designing the forks and mounts, I failed to consider how much TPU squished, which goes a long way to explaining why the robot beached itself twice against @Pinski1’s excellent Fig Roll 2 in it’s first fight.
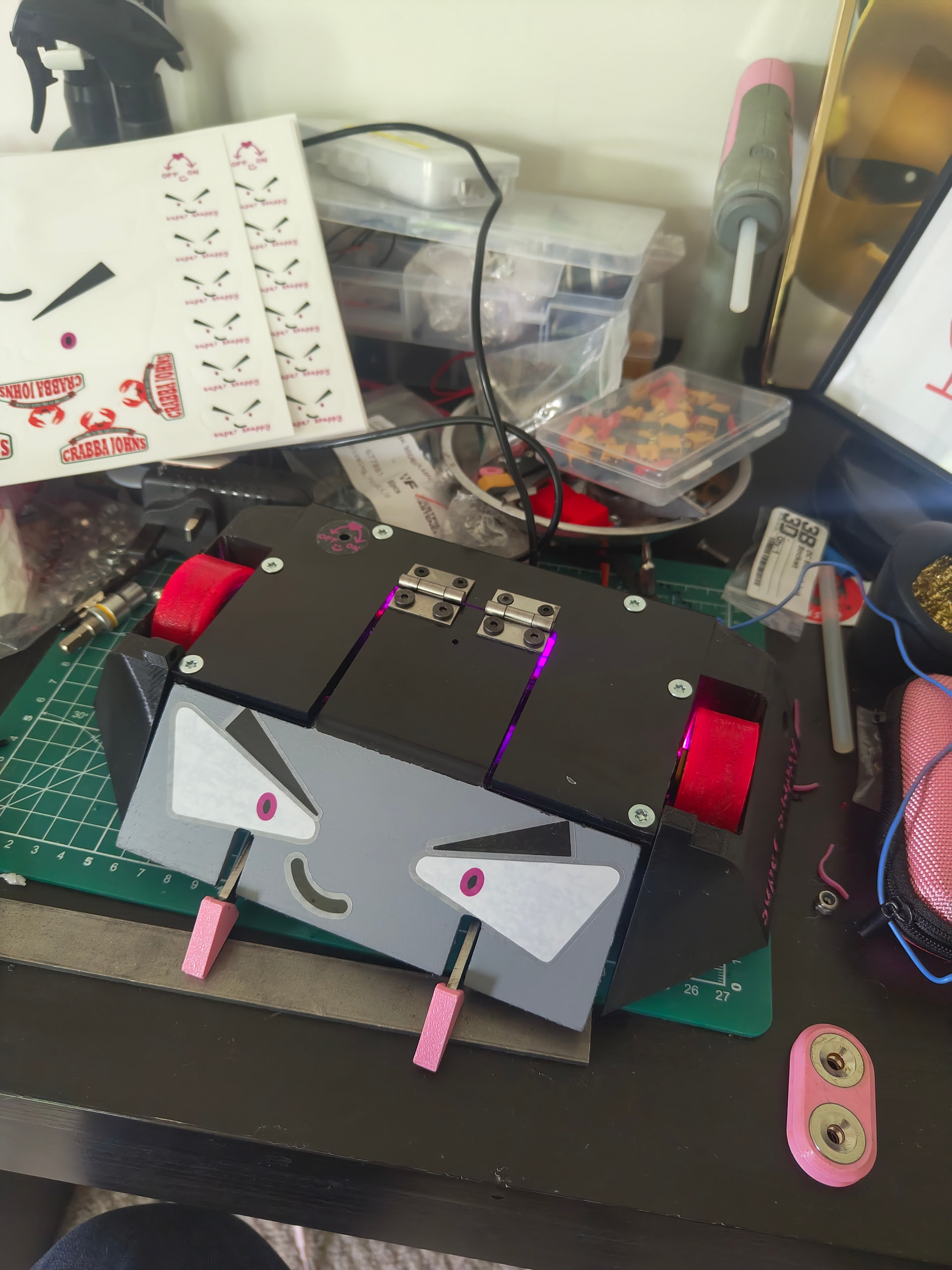
Beyond this point the build was largely complete, so I turned to aesthetic. I decided to get the faces printed on stickers for easier placement which worked great, though I made them slightly too big in my opinion. Thanks again to Nick for putting me onto StickerIt and their 10 sheets for £9 offer. If anyone wants a spare face let me know I have 19 more. Also pictured is the logo I made for Crabba Johns, which was a lot of fun. Thanks Joe and Rob <3
Weight distribution was as mentioned… an issue. I have PTSD from the first Mr Snappy in 2014 being unable to push aaaaanything because of being so front heavy, that on going back to a 2wd bot, I think I consciously wanted to avoid this, forgetting any other issues that may arise. So I printed these neat little rear skids
A ready robot for MITE. Given the bottom of the robot was loaded with magnets, I didn’t really do too much drive testing, thinking that it would be completely different on the arena anyway. While that last point was true, this, my friends, was an idiotic decision, and would have likely pointed out a bunch of issues that came to light on the day.
And here with his best pals! I had the best time over this event weekend with these guys and everyone else I was fortunate to hang out with, so thank you for a weekend that really fed my soul.
Tom Chadbon (pictured here as Stockbroker in Casino Royale) came to the event and didn’t bring me much luck, though it was great to have him accompany me at such an incredibly well run event.
I guess this is where we talk about the terrible performance but general upwards trajectory at the event itself…
Fight 1 against Fig Roll went largely as previously mentioned, with an addition of the robot driving terribly, for many reasons. After this fight, I removed all magnets and added some bolts into the TPU fork mounts. This helped the driving slightly, and improved the forks for the rest of the day. Rob was very gracious in saving me from my forks once but when it happened again later in the fight we were both in agreement it was time for Snappy to stay beached. Lifter worked tho.
Fight 2 against Critical Fail, a Thagomizer style spinner, was more successful but not an exciting fight to watch. I was still having a lot of driving issues in trying to keep the robot going in a straight line, though it was better than the first match. I won on a judges decision for managing a few lifts and to control Critical Fail a little. I wanted to try to pit it but with how unreliable I was finding the drive, I chose to not drive towards the large hole given I felt I probably would win the decision. I adjusted the expo on my transmitter in order to try and make the drive better for the next fight.
Fight 3 against End Boss and Mow Problems was obviously going to be a bit more of a bloodbath. Both big boys went for each other first, and after a few seconds of dodging around I decided to join in. End Boss was taken out by Mow shortly after this, leaving Snappy, still driving fairly poorly despite changes, against one of the highest energy horizontals in the land, with a 5mm HDPE wedge. And it stood up! Of course, Rob rightfully won this on a judges decision, but I was ecstatic with making it to the end of the fight with a working robot, albeit one with a few more gouges and a side pod barely hanging on (turns out washers would be a good addition to squidgy material, who knew). It proved this old boy could still do what it used to, tank the hits. Just needed to fix the other bit - driving well and therefore being okay to watch.
I found out before my whiteboard with pals Crabba, Sir Lance-a-frog and Clod that my transmitter had been outputting between weird limits on one of the drive channels - I had copied an old model and not checked the output page to see this. Oops. The other issue I’d found is that with both skids under the front and the back of the chassis, the moment any one of them rode up a bump, neither wheel was on the ground. I fixed these for the whiteboard, removing the front skids entirely and adjusting the transmitter, and it drove nearly as good as a Snappy used to. I still have no idea how some of you guys drive some of the brushless bots I’ve seen but… it’s getting there. Froggy won the melee which was a joyous end to our event.
Note: drive test from the Tuesday after MITE, on dirty wheels on a slippy floor. Already so much better than it used to be.
So. An unsuccessful success story. Unsuccessful in that, in terms of the competition, it sucked. Real bad. Even in terms of being fun to watch, one of my primary criteria. But the successes mean that hopefully I can work towards righting those.
I actually got out of my rut and designed and built a robot, no matter how simple. Check.
The robot looked kinda cool. Check.
While it sucked, the robot improved across the day to a point where now? It drives pretty good. Check.
The HDPE wedge proved it’s worth for tanking hits when there are already forks providing the ground game. Check.
My otherwise fairly old-school 5 and 10mm HDPE (with bolted on TPU) construction still works? Check.
I got to be a competitor in a competition for the first time in 2 years, which along with all the previous successes revitalised my energy for the hobby that was reeeeeeally waning. Absolutely check.
I can’t emphasize how healing it was to be at such a well run event in a super cool city (Norwich, turns out my prior assumptions did you absolutely dirty and I’m sorry) with great friends. Thank you everyone who ran the event and everyone I got to chat to.
I’m really excited to do more things. This version will be at Pub Beetles laaargely unchanged, but I’m already cooking on a new version to right yet more wrongs. We back. Feels good. Thanks for reading. Love you xo
Whiteboard: vs Crabba Johns vs Sir Lance-A-Frog vs Clodomizer-minus-the-omizer
Watching these is like a horror story in reverse. Starts as bad as it could possibly get and a sense of reverse-dread creeps in as the situation slowly improves. I mean it doesn’t end good but… better than it started…
I did drive test the thing at home but it was so loaded with magnets that I thought the overdriving would be corrected by the vast downforce. Was obviously mistaken, which is fine. One of my biggest mistakes was assuming a brushless gearmotor was anywhere near a 1:1 replacement for a brushed motor. My builds have always been super basic and primitive, which shouldn’t be an excuse for my stupidity, but I’m pleased to at least be learning.
This version will definitely drive better (still lots of tuning to do, obviously) but have it’s last outing at Pub Beetles before I bring it back to some form of 4wd for the September Swindon event.