Having built a number of different ‘meta’ beetles I decided to give something else a go for the BBB Subterranean Showdown 2023 event. This wasn’t ever meant to be competitive in the sense of a competition winner, and for me was just a bit of fun and a ‘could it work’ kind of deal.
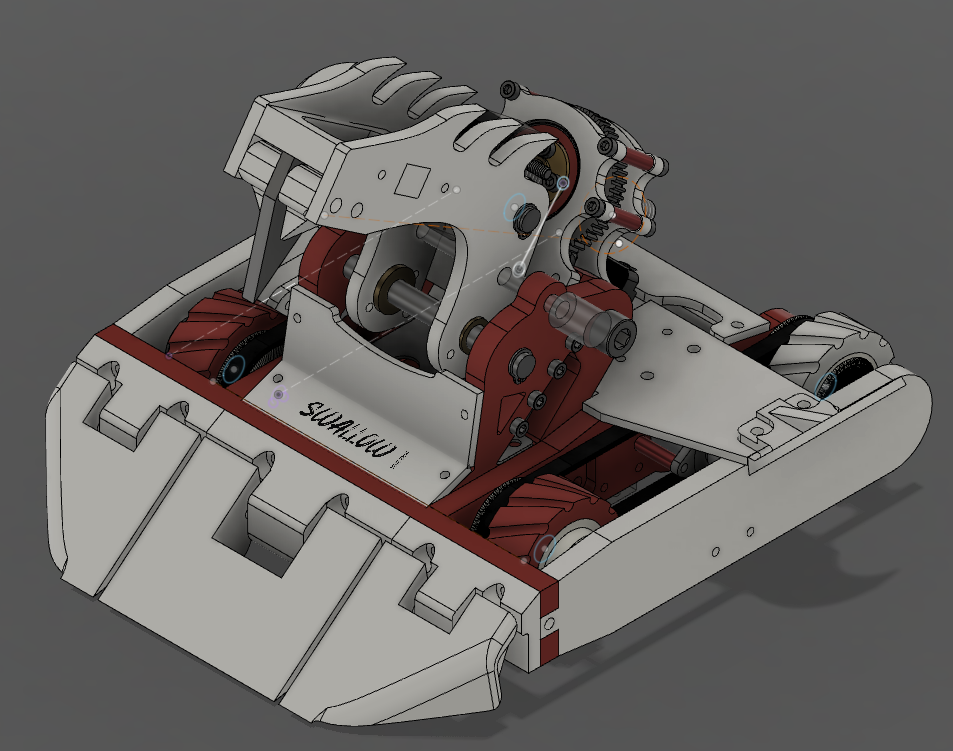
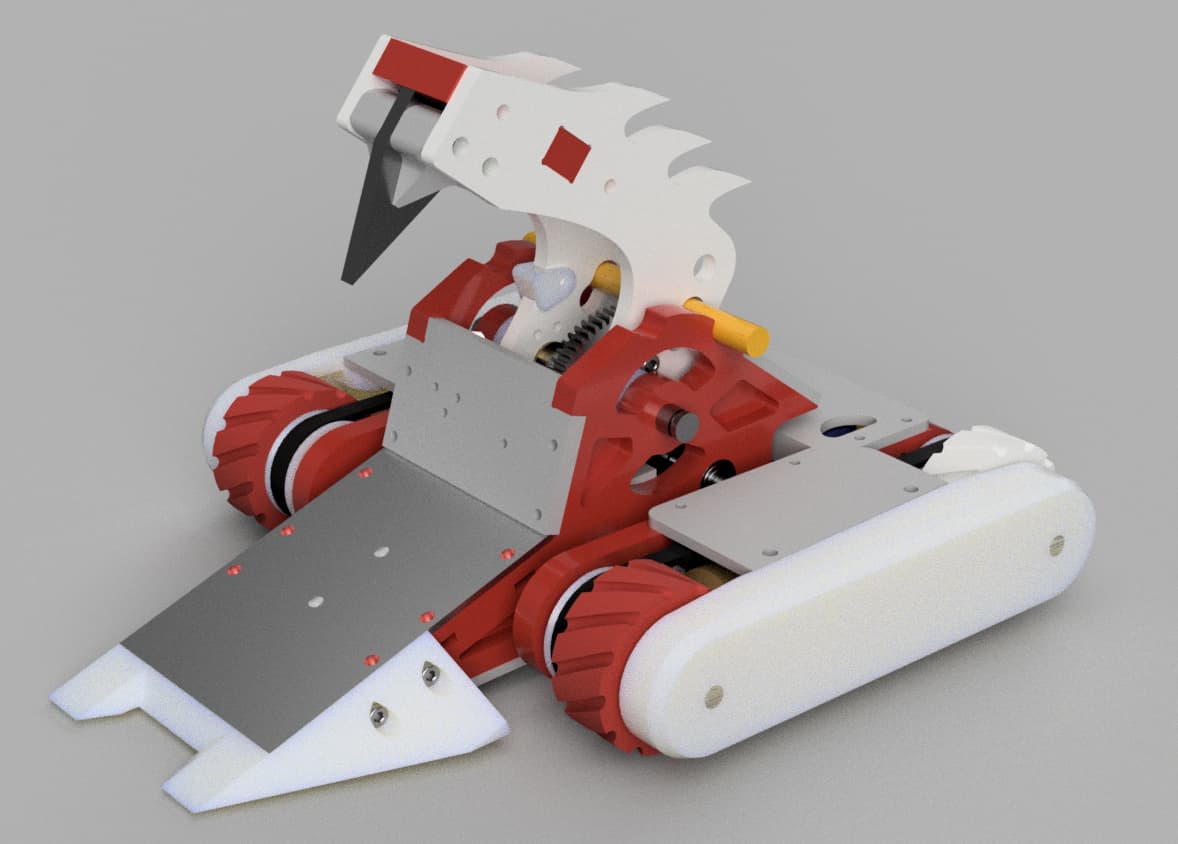
I had the idea for a crusher floating around for ages, so with the spare parts from my ‘competitive’ (I say loosely) egg beater bot, Contradiction, I set about on a design. Once again this was pretty front loaded design in Fusion 360 so that the manufacture and assembly was just a jigsaw puzzle - I wouldn’t have to make much bar the front wedge by hand.

You’ll see some bits here that didn’t make the final cut - the wings that would prevent it from rolling over never got made as weight ran out. But I did have the idea, honest!
Before I set about making the thing, the beak mechanism went through several prototypes:
The first made out of PLA, because at the time my other printers were busy doing other things. Did it work? Yes, for about 30 seconds.
The motor also was a scavenged 2836 with dubious quality, and a bit bulky.
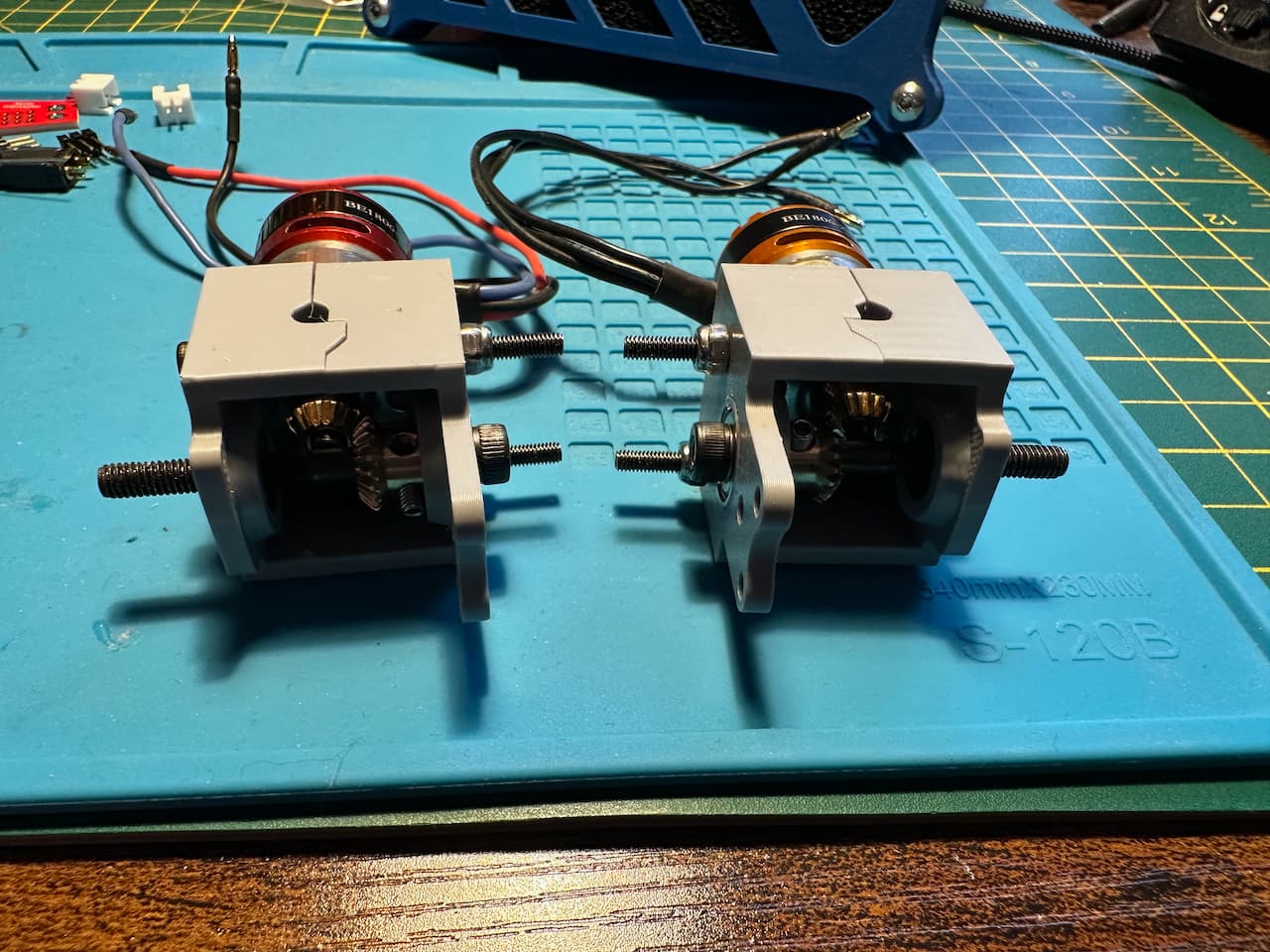
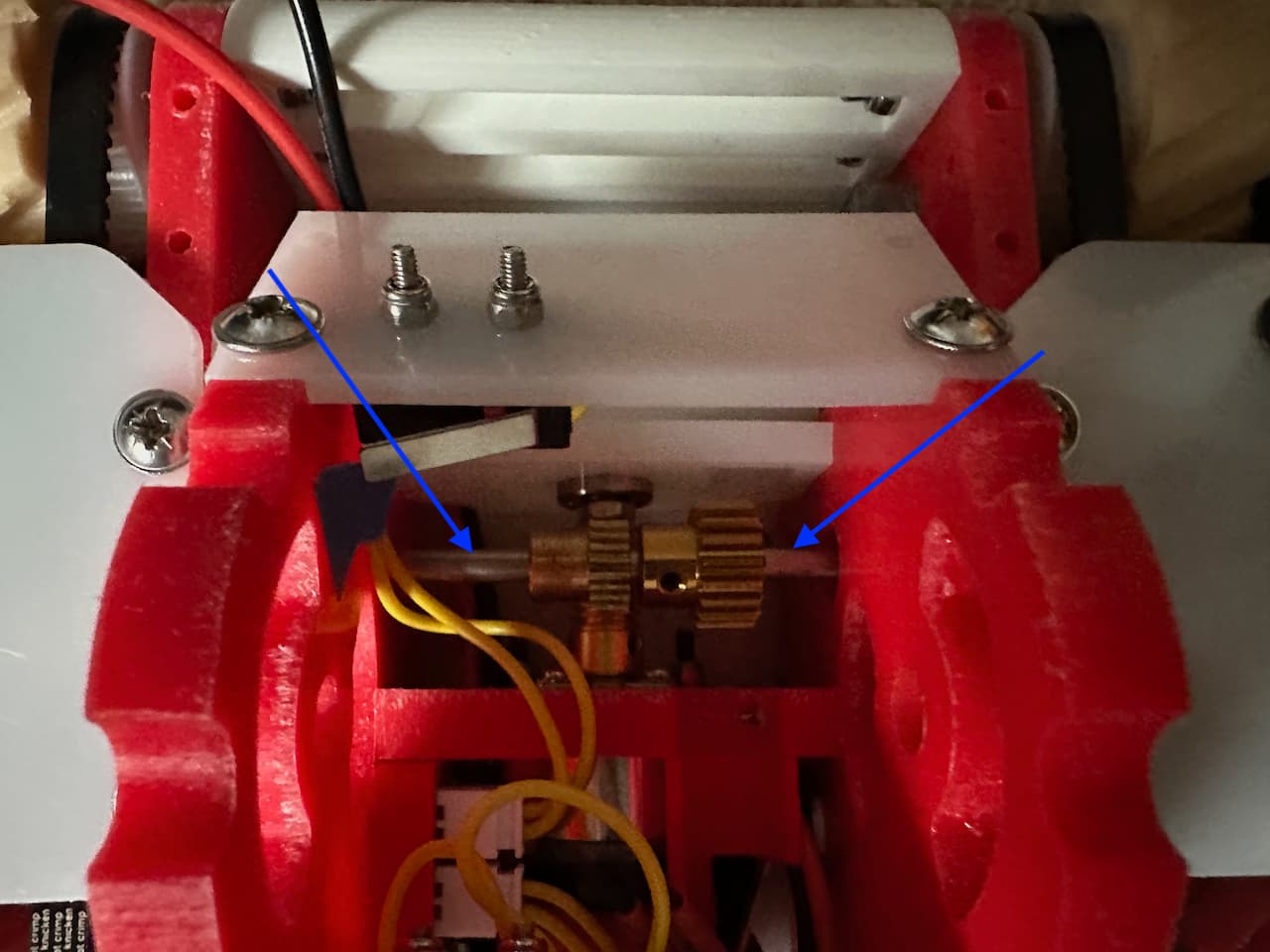
Several other iterations later (that I didn’t take photos of), and we ended up with this 2 stage design:
The bolts went ‘out’ rather than ‘in’ and I found out later this made it a pain to assemble! I changed this in the final final design so that the nuts were inside the mechanism
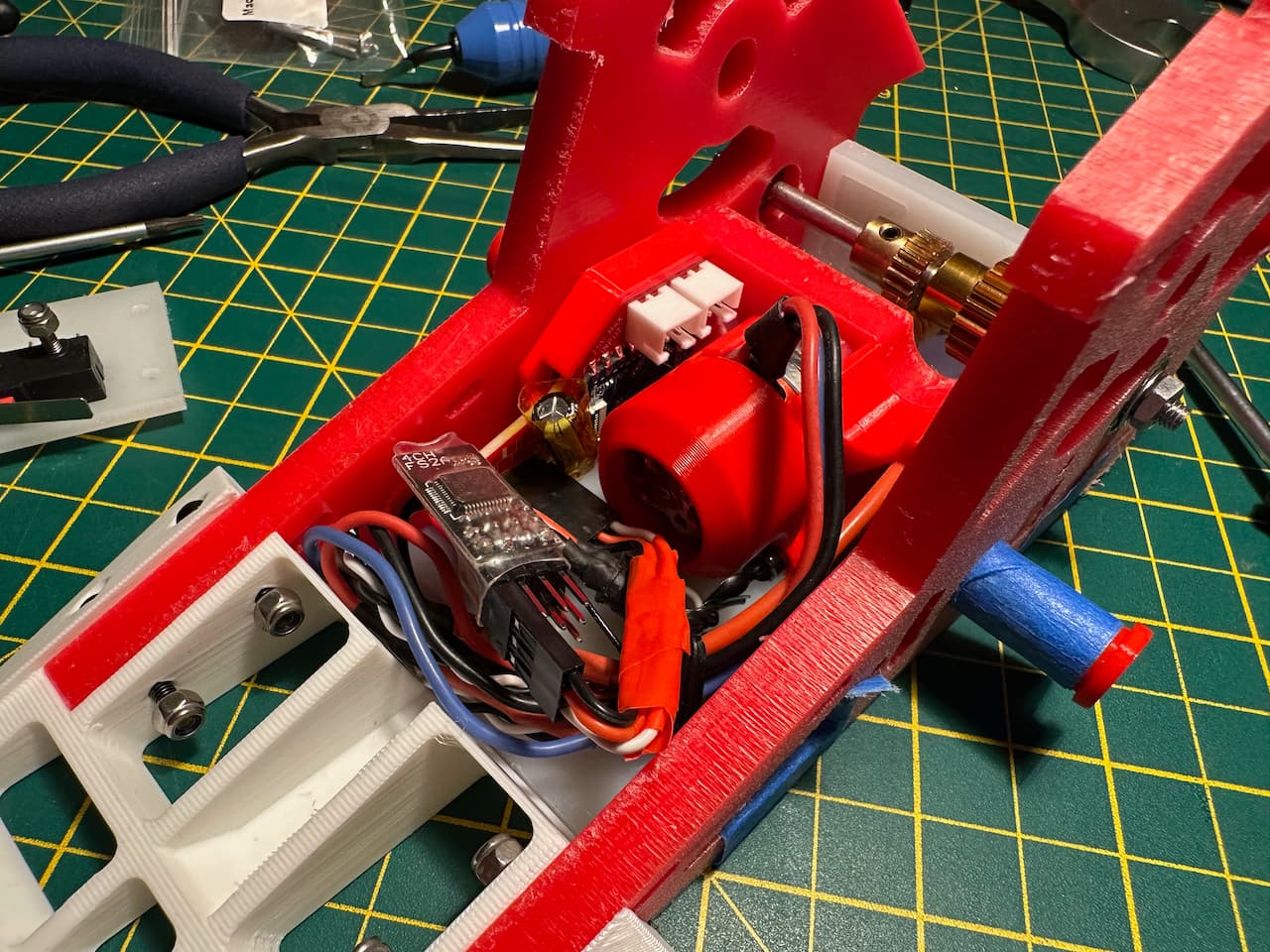
At this stage the beak design wasn’t locked in, but I wanted to try out the concept. So I make some bulkheads and put it together:

A test video got posted to the OOTA Discord of this test if you want to go hunting ![]()
This was around May, and it got sat on for a few months.
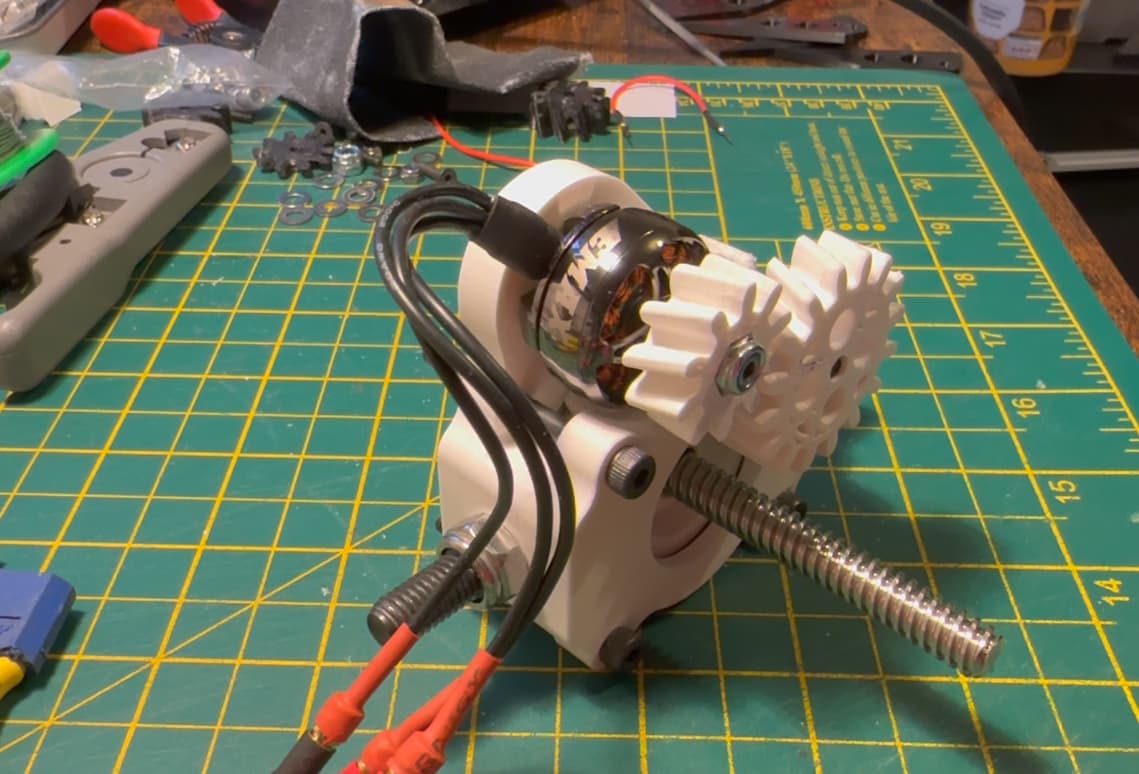
Around July I picked it up again, and started on the CNC parts:
I had the old screws from Contradiction, but these were countersinks, and given what happened with Contra at the BBB Summer event, I wasn’t going to make the same mistake. So button heads were put on order (the ones in Contra also got changed)
We were getting close to the POM deadline now, but we made it in time: https://www.youtube.com/watch?v=8u60uYA2mJU&ab_channel=TeamDarklightcombatrobots
I just had to finalise the beak, and it was at this point I realised I was out of white 5mm HDPE. The rest had been built from the stock I had leftover from the last Contra build so I hadn’t had to buy any. So black it was going to be!

The printed TPU sides were also now done - not the tidiest that they’ve ever come out, but time wasn’t on my side to print them again. And besides, why did it even matter, it was going on a Combat Robot after all!
Also appearing is the wedge I never used in the end - I had this for Horizontals but never met any.
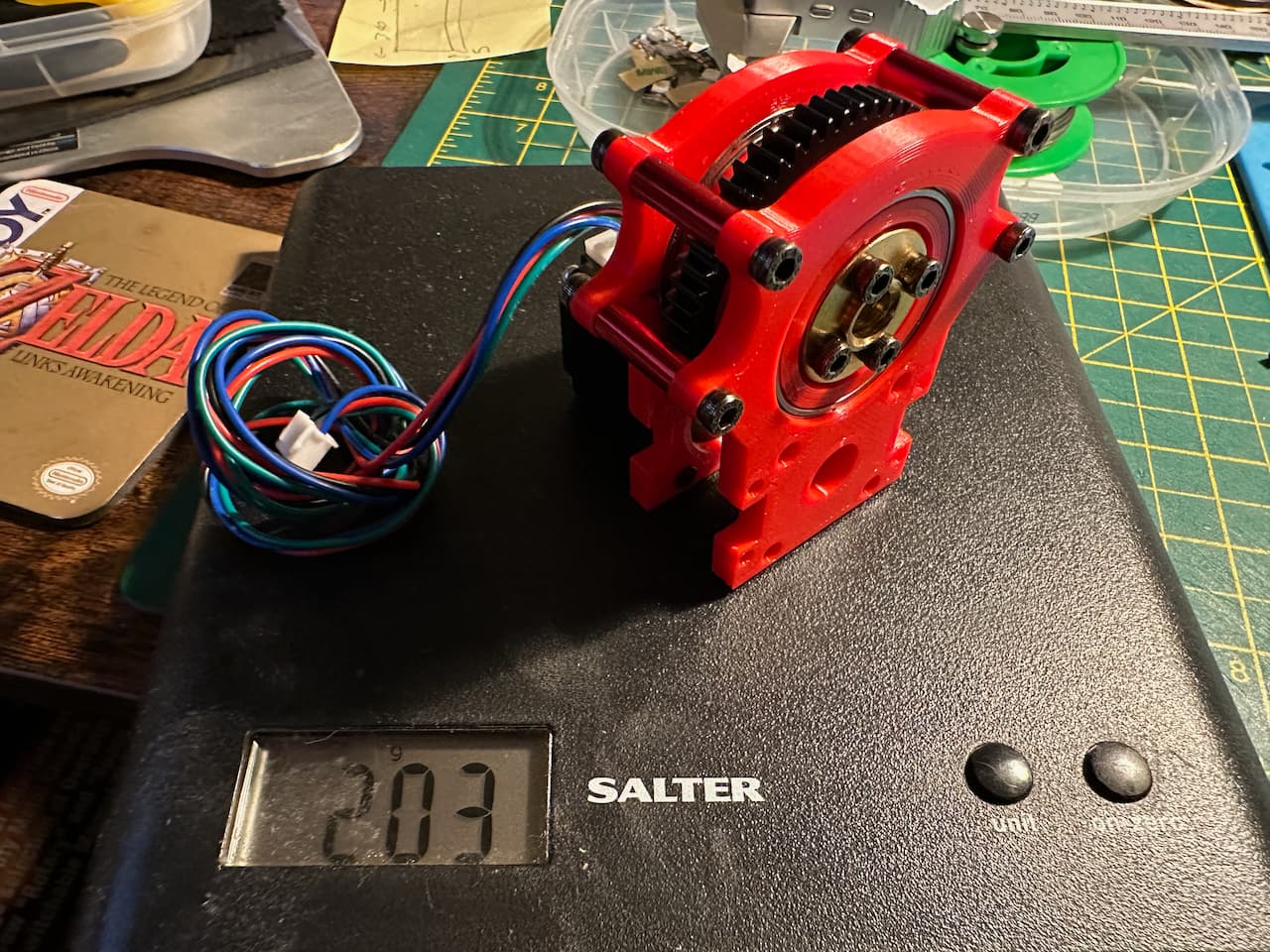
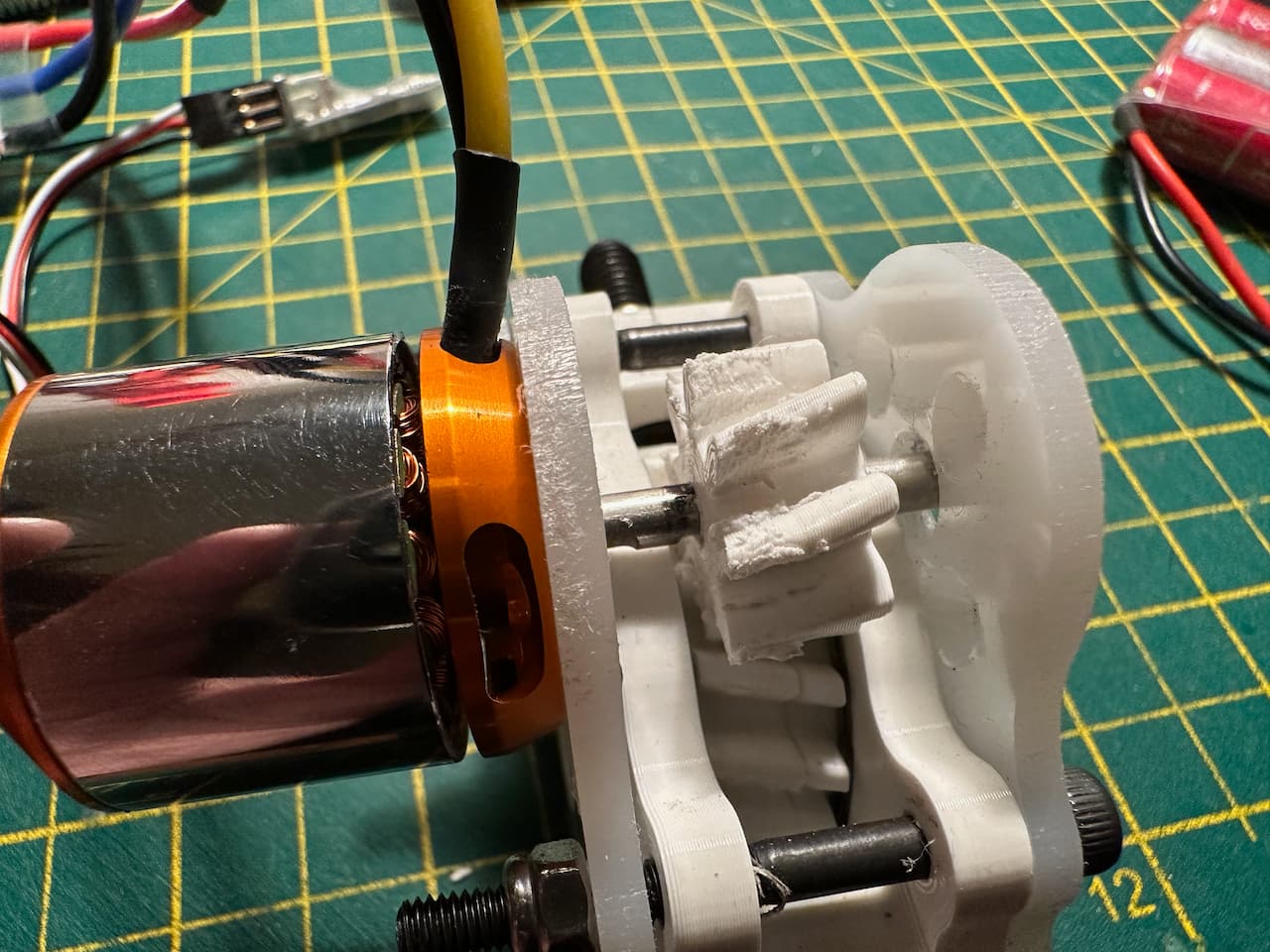
Between this photo and the event was the mad scramble to the end. The gearbox was still PLA but the plan was it was Nylon for final. However at this point, I realised I hadn’t dried the Nylon filament, and had no time to leave it in a drier for an extended period (the print room is also my day job WFH office so it couldn’t just stay on). With mere days left, I picked the next best thing - I had some ASA for reasons, and this seemed to work OK in other applications, so ASA it was
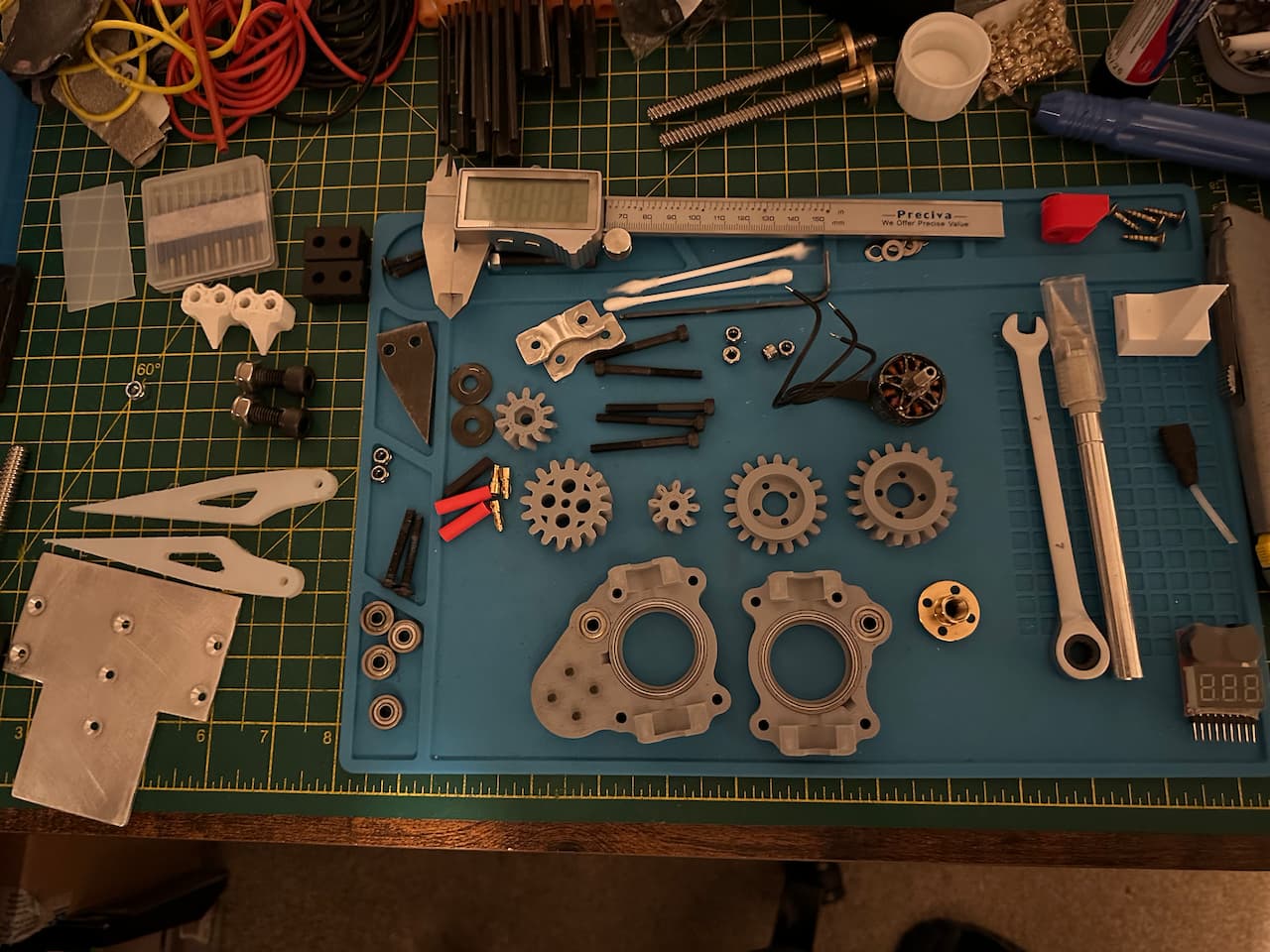
All the bits that go to make the gearbox ready for assembly. I dod however keep the PLA version around - which came in very handy later on.
I wasn’t 100% happy with the gearbox, but you can’t be choosy this close to the event. It could have done with maybe a few more iterations, but… ehh
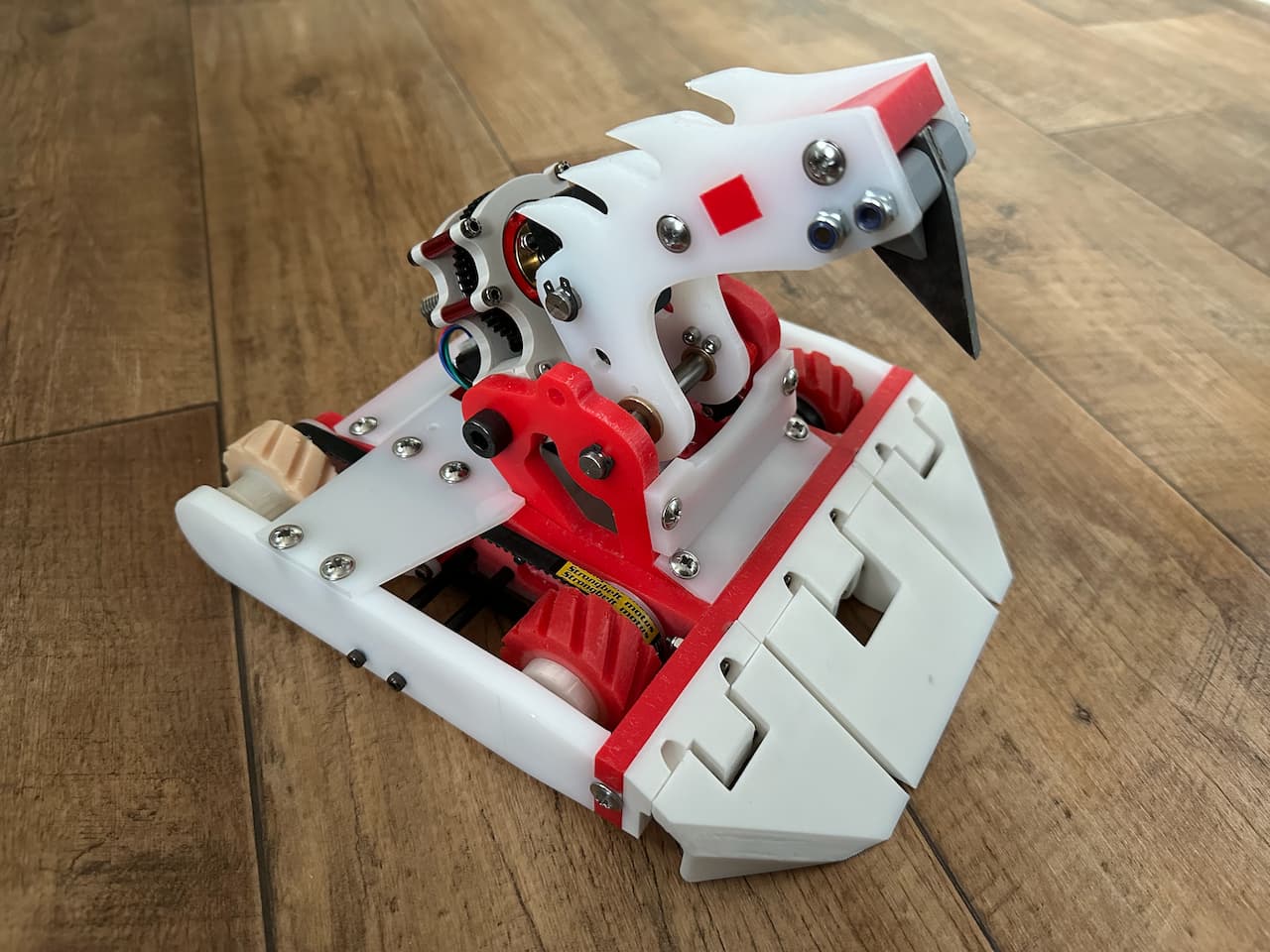
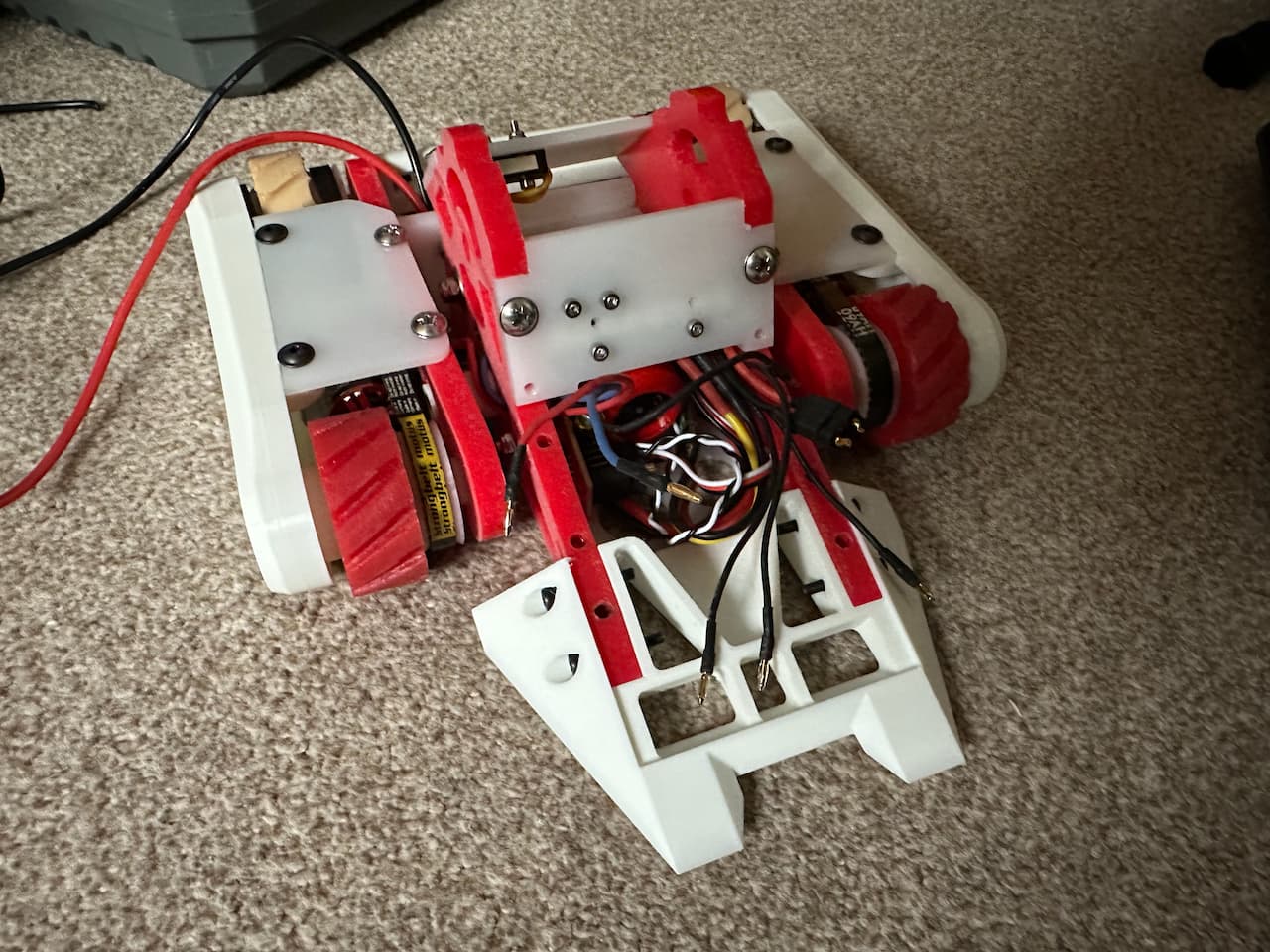
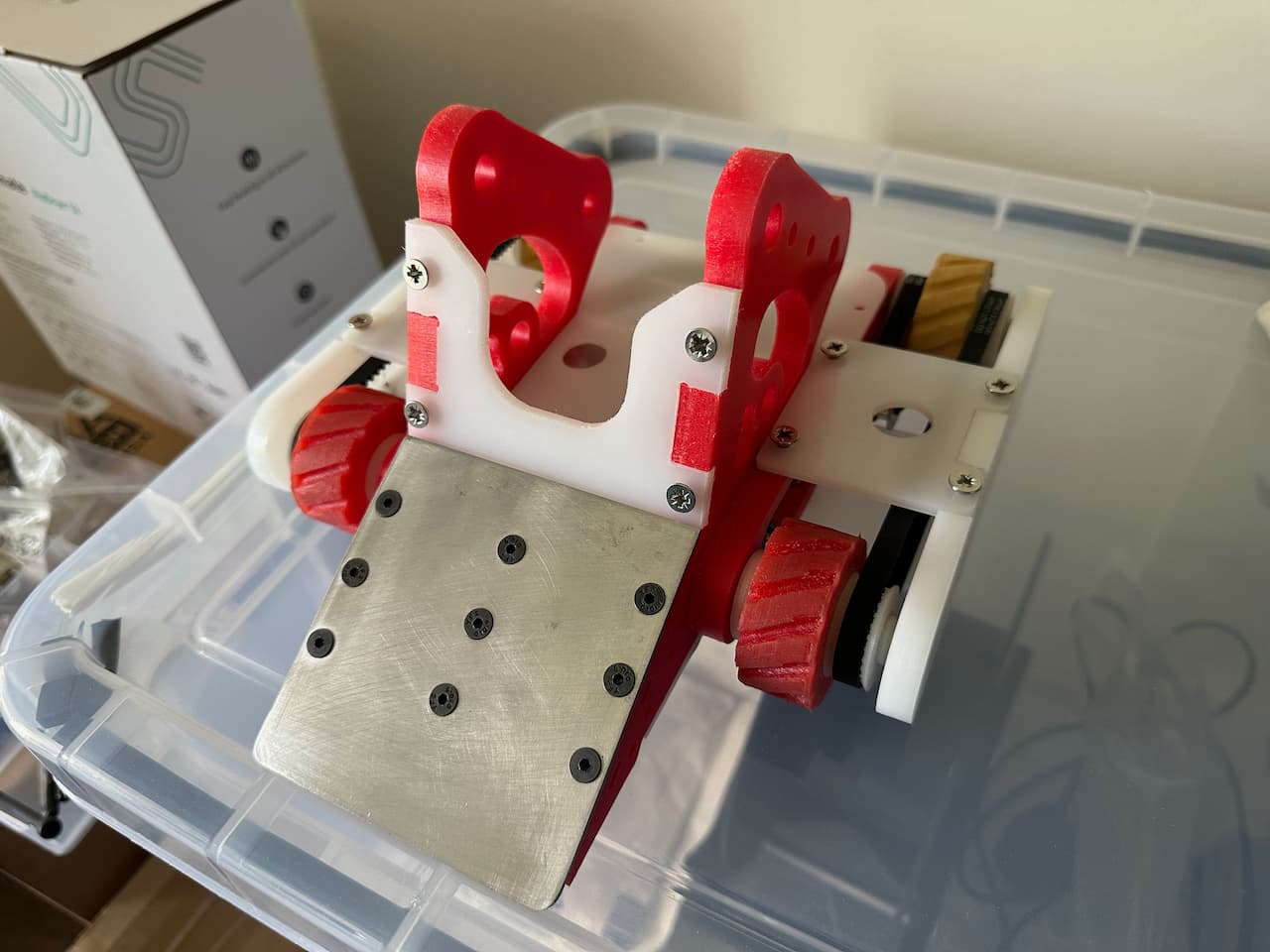
So here we are, at the event:

We now have forks and a different wedge - this actually worked out really well apart from when it didn’t
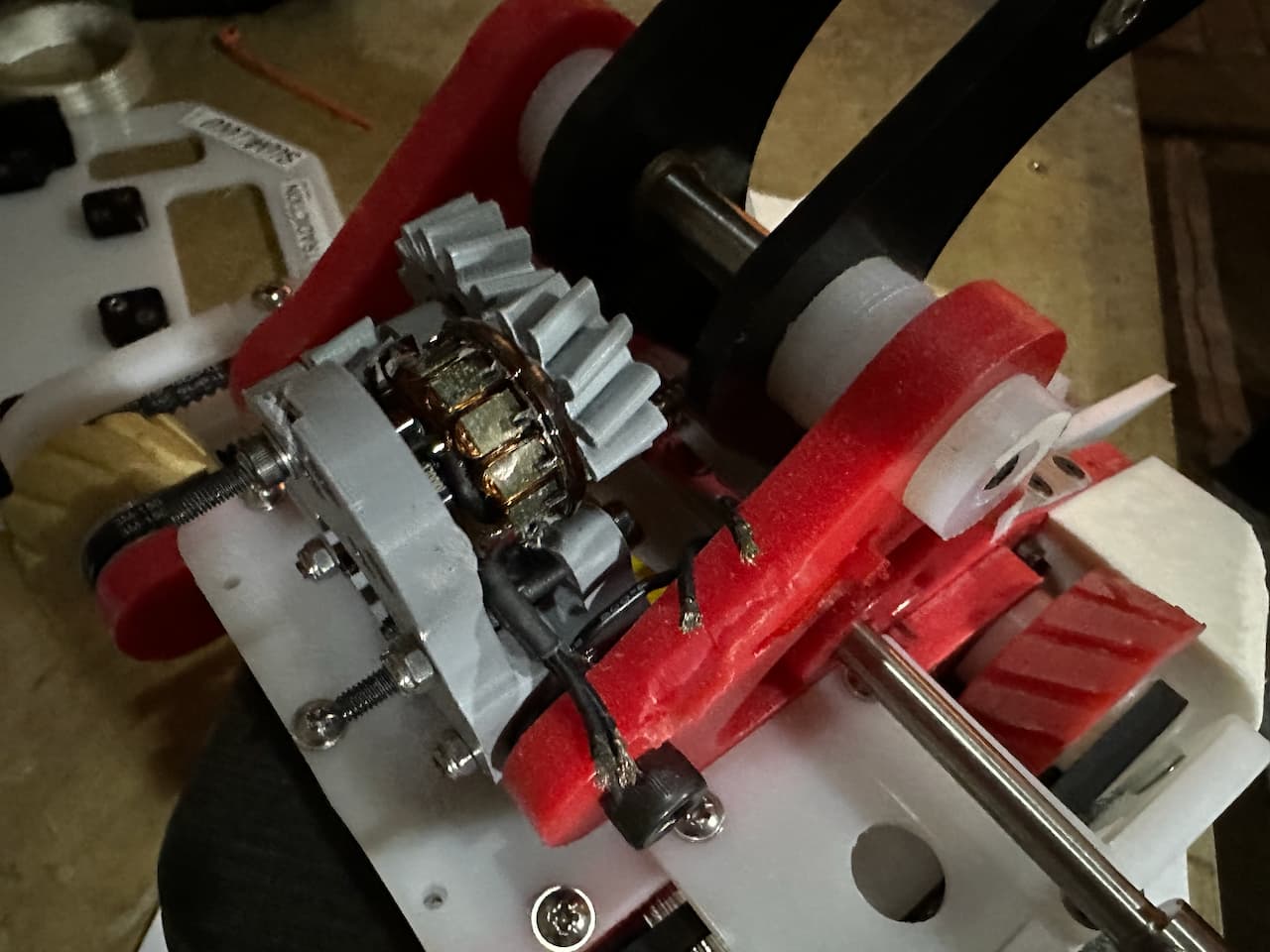
So I lost all my fights - which went as well as to be expected! The first fight melee I got turned upside down and hit in that place. You know how in a lot of video games, the boss always has a weak spot? Well for Swallow it’s the motor on the top of the gearbox. You’d think it was out the way enough, wouldn’t you? Well actually no - Delta V (who - spoilers - won the event in the end) hit it and the motor just exploded.
That was that for fight 1 - no way to get up from that.
Having cribbed the motor off the other PLA gearbox, and the PLA pinion with it (which surprisingly actually held up) we went into the next two fights - Grabbing defeat from the jaws of victory and being pushed around by a brick.
All in all the bot left the event, defeated but relatively unharmed.
I did get a nice award though!
It’ll be back, but entirely new beak gearbox with more (far, far more) torque for those thick tops, and let’s fix the self righting and getting upside down to start with, shall we?