Hi all! I recently discovered this forum and thought I would post some pictures and details on my builds, probably going back in time from the most recent.
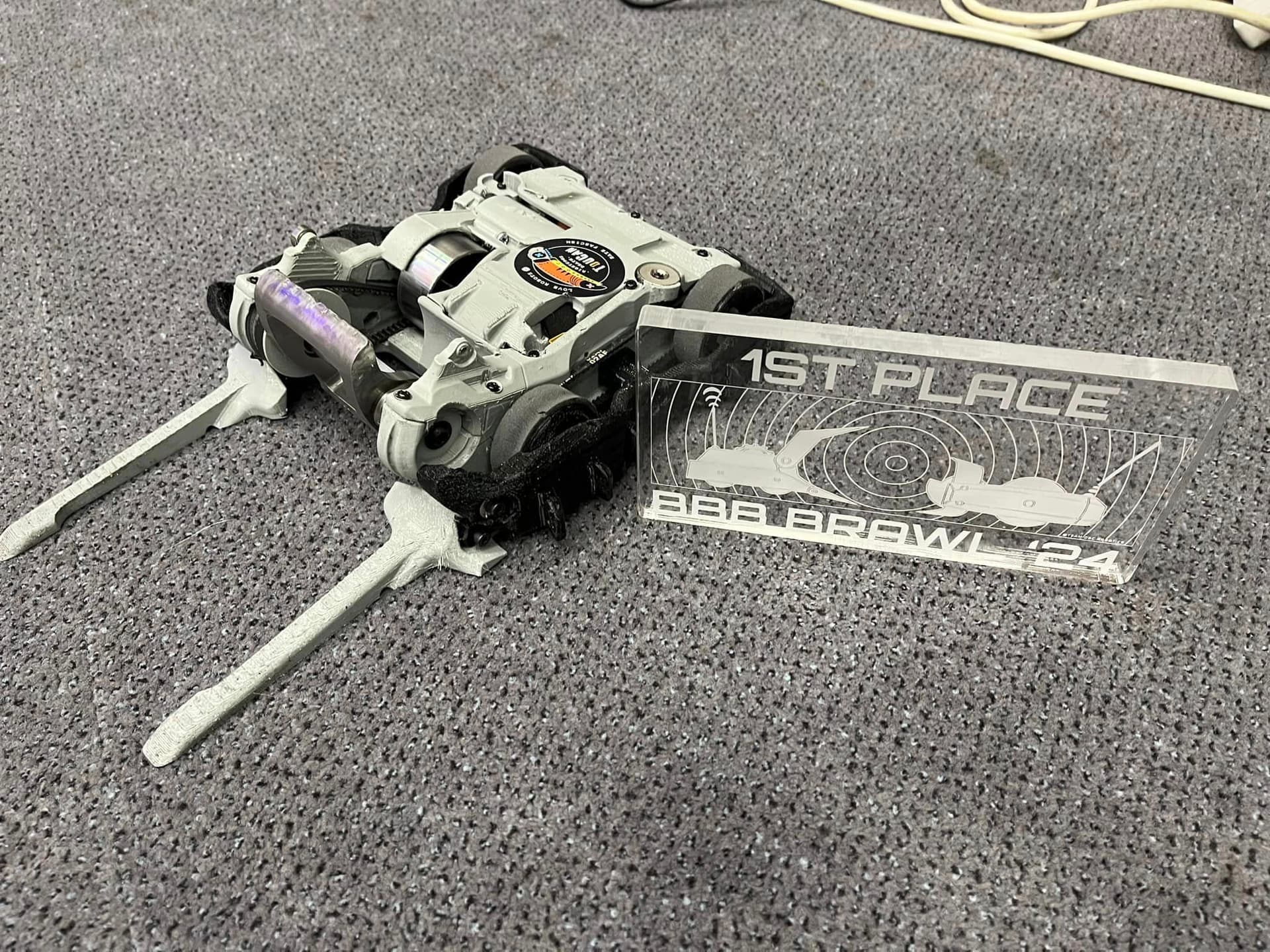
Starting with Propane, a beetleweight I recently built for BBB Champs 2023!
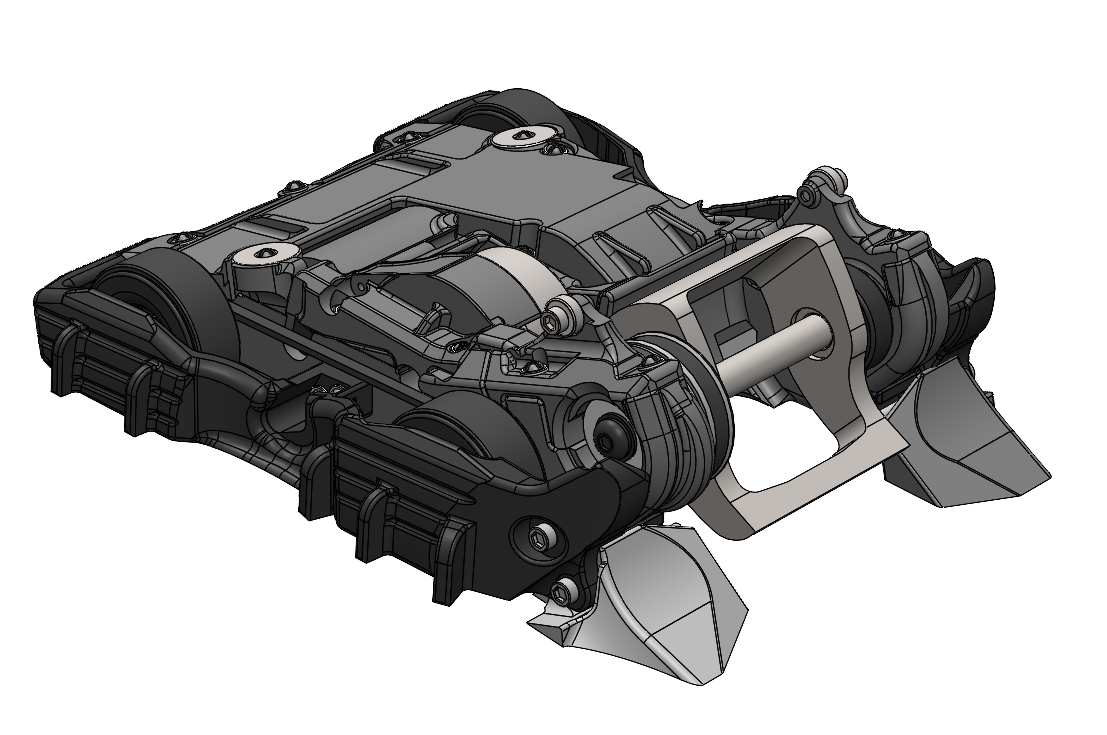
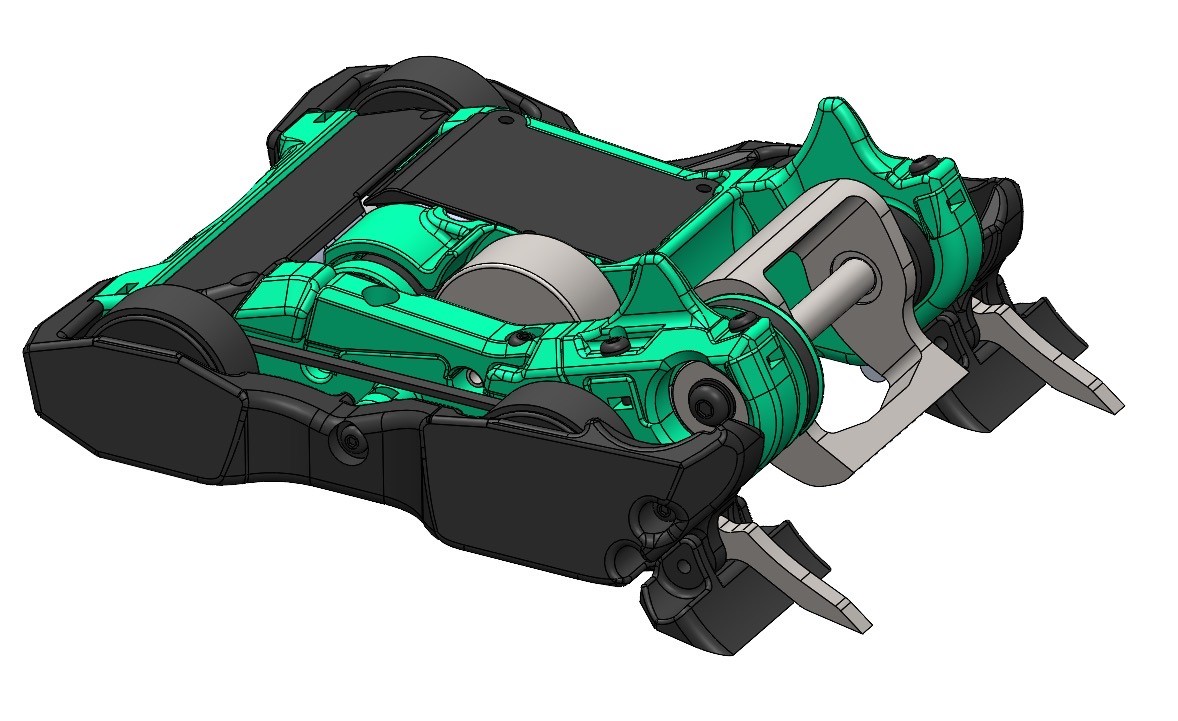
Completed initial CAD for the robot, a few evenings of CAD work went into the design, but I had been pondering different ideas for an anti-gyro flywheel for a little while and the workings/maths for this were a fair bit of work. That, as well as how best to go about the weapon and drive took a while before putting it down on paper(CAD in this case).
The drive I ended up with, goodies from Aliexpress to try and save some money rather than buying the off-shelf products. In hindsight I would’ve just saved myself a heap of time and work and spent a bit more on the pre-made solutions but heyho.

Since the drive ended up really heavy, and I hate the fiddly little screws used to mount them, I decided to grind flats onto the gearboxes which could then be used to locate them in the frame, and clamp them rather than using the screws in the front of the gearbox.

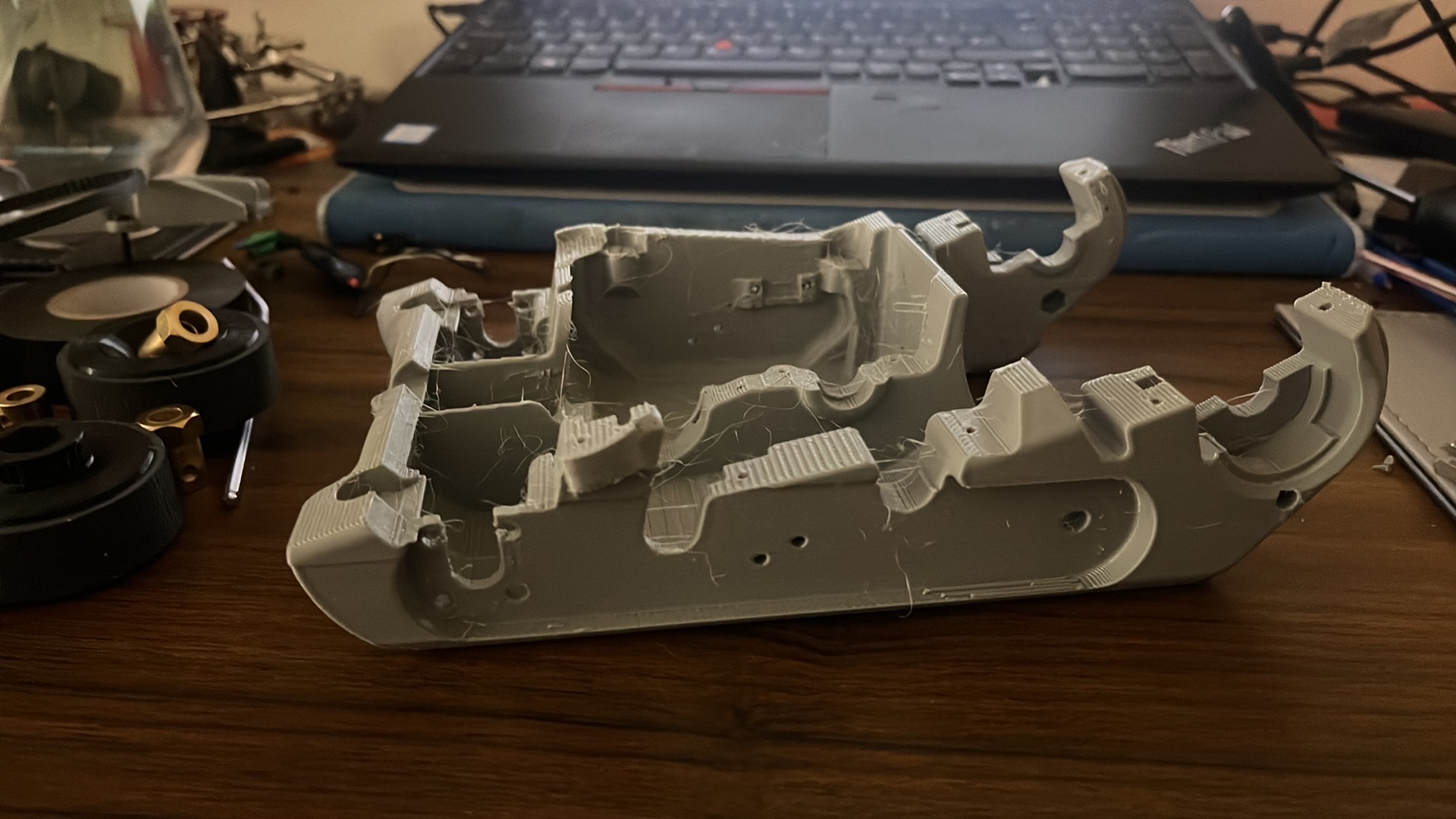
PLA prototype chassis to test fit everything. One of the things that even made this build possible was my recently purchase of a Bambu 3D printer, without this I would not have attempted this build lol.
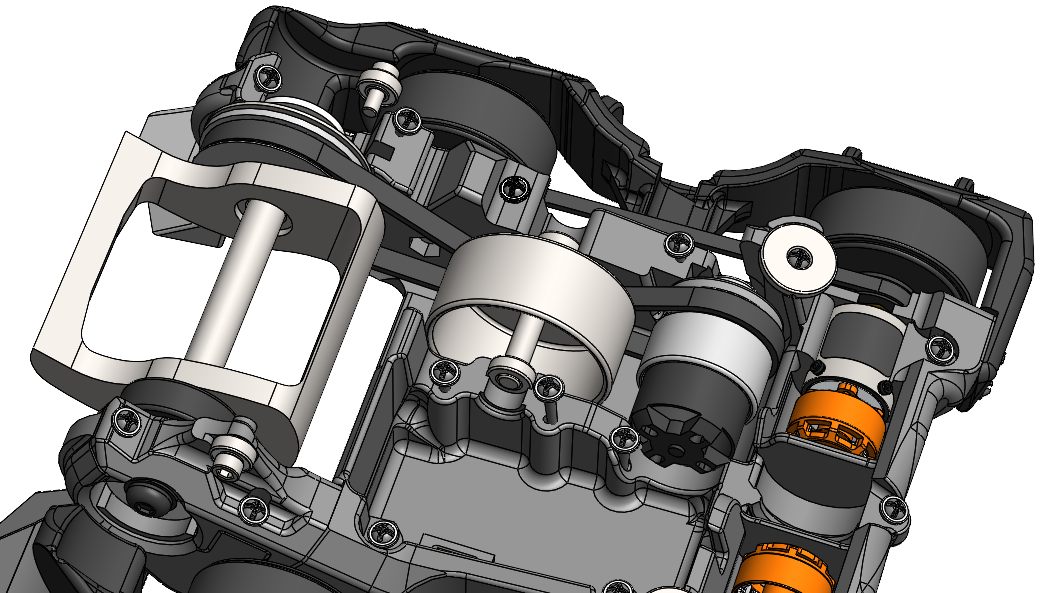
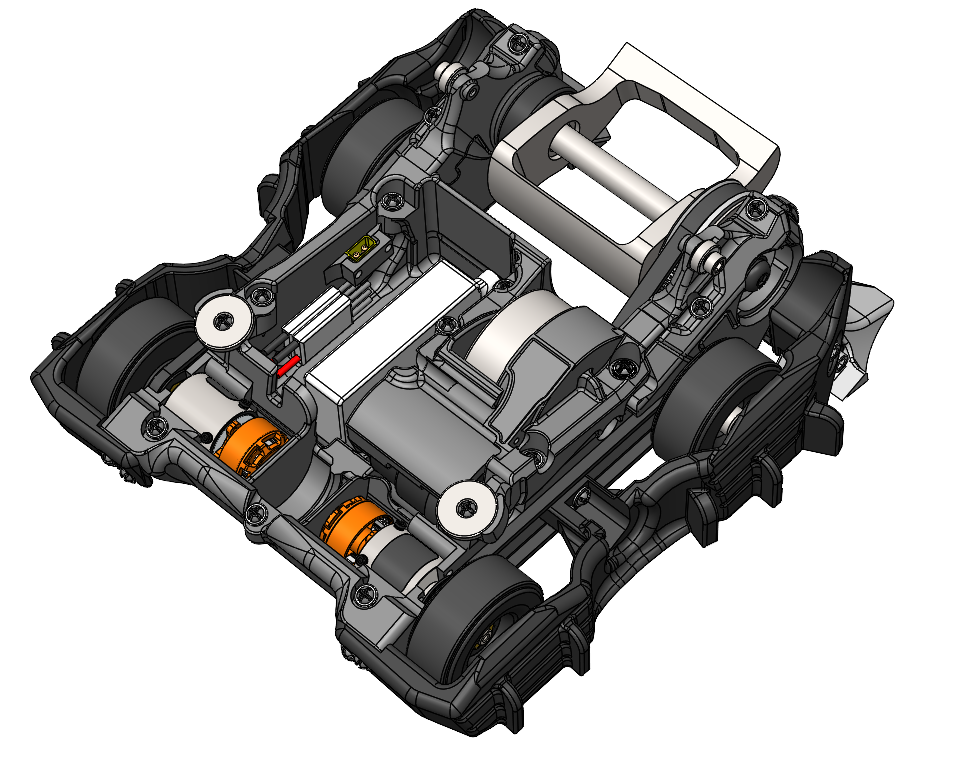
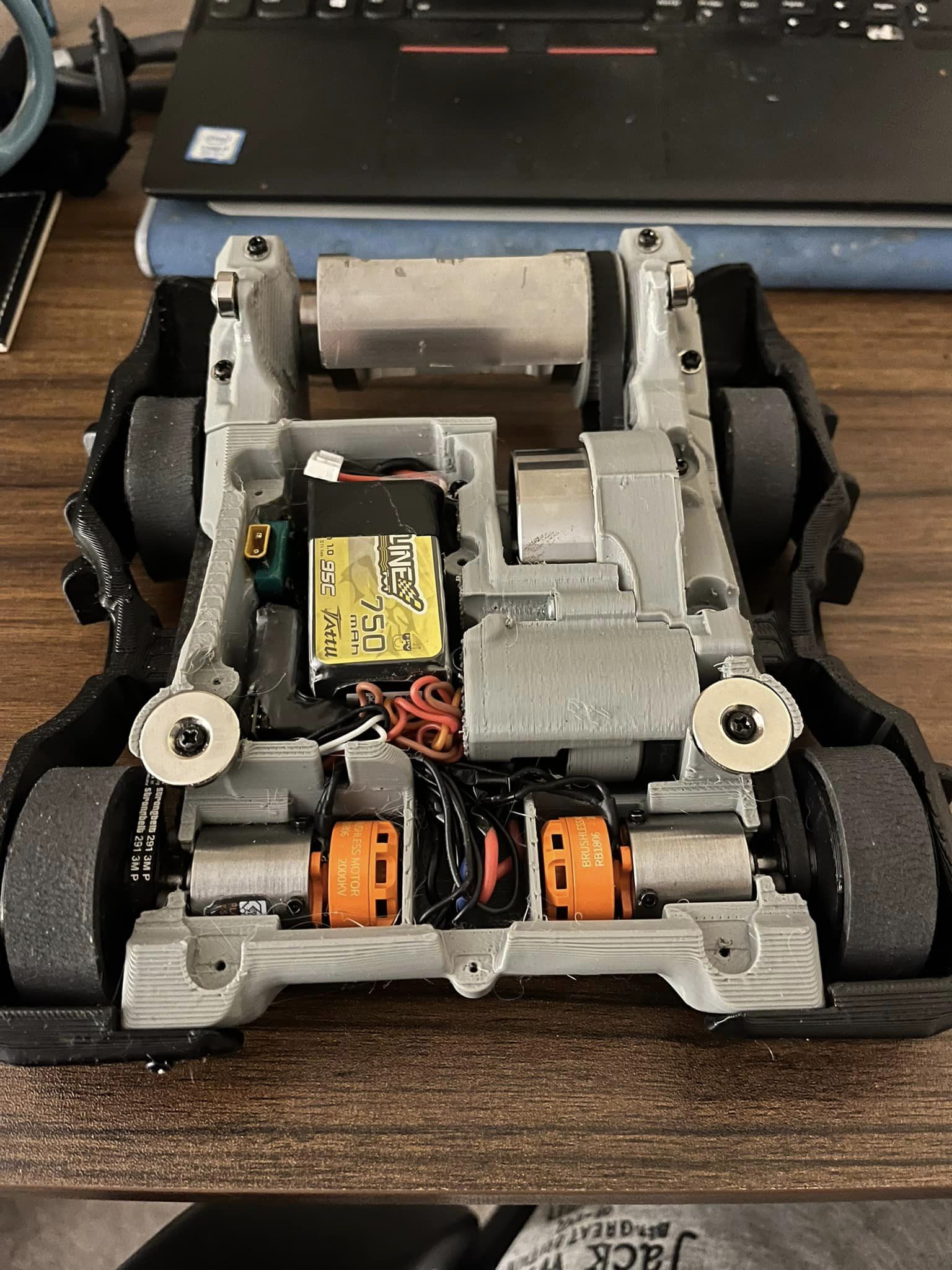
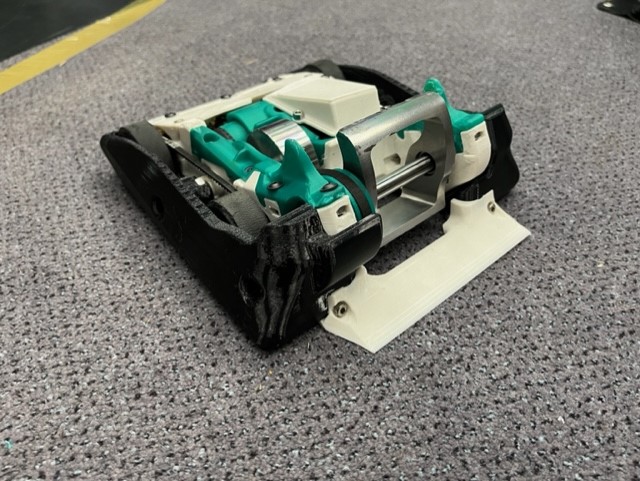
You can see the general layout and the way everything is mounted from the top here, making servicing everything easier.

I opted to use 98a TPU for the chassis, which I was concerned would be a little too flexible compared to Nylon (but much easier to print). To help solve this, I added some aluminium inserts into the chassis to take the load of the weapon. These go under the weapon shaft and bottom out on the arena floor during a hit. Along with forks in the back!

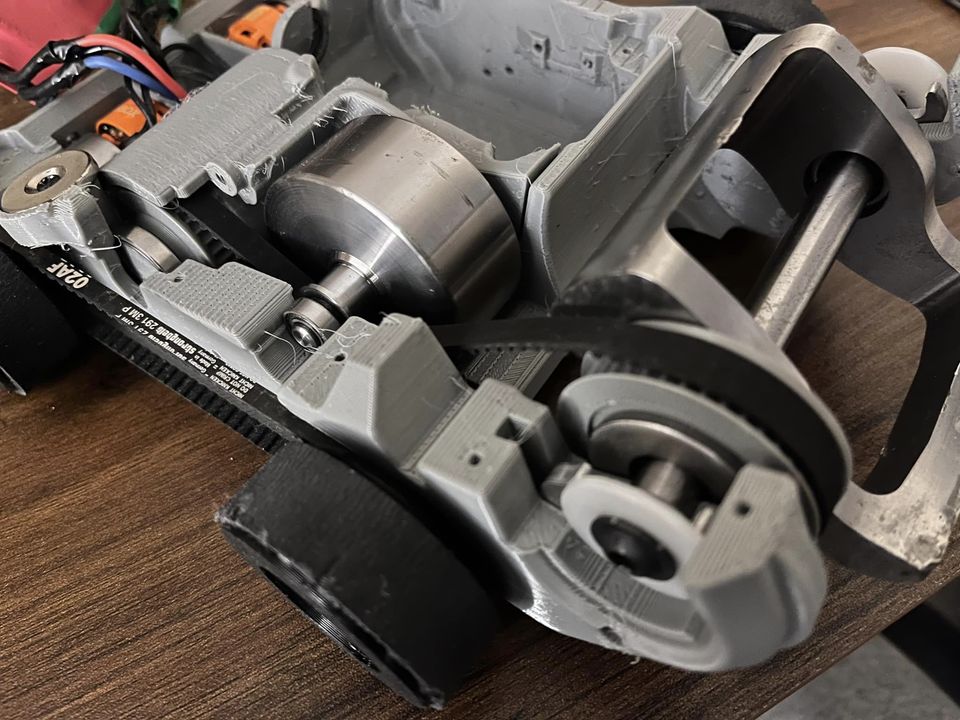
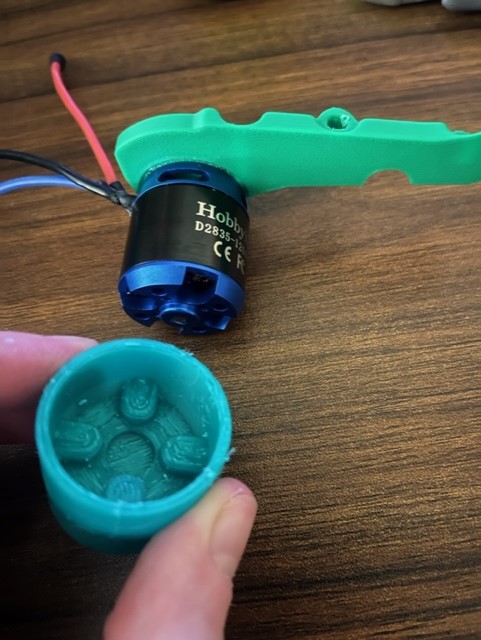
Again to avoid any fiddly little screws coming loose, I prefer to mount my motor pulleys to the outside of the motor like so, in this case held by some keying as well as friction, with a bearing sitting on a peg at the back of the motor for additional support.
Flywheel! A lot of work went into matching the gyroscopic force on this and the weapon, via a lot of trial and error in CAD comparing the MOI and rpm numbers to eachother until they somewhat matched. This part is very optimised for high MOI at minimal weight, as it was a real squeeze to get everything in weight on this robot.

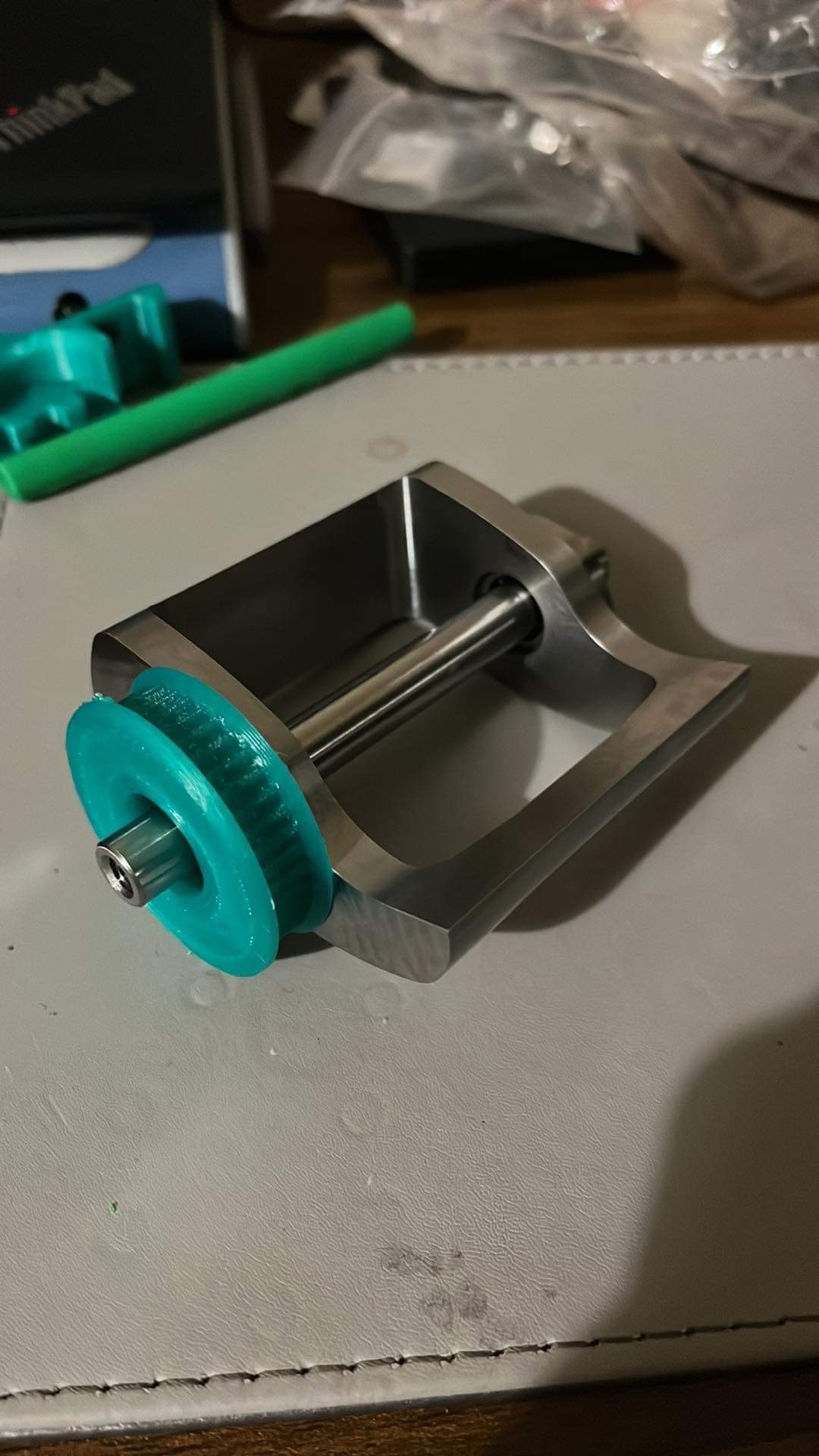
Shiny beater! Running on needle rollers pushed directly into the beater, on a 10mm EN24 shaft, with the pulley keying into the side of the beater. Like the flywheel, I spent a while optimising this for minimal weight with some decent MOI and bite behind it.
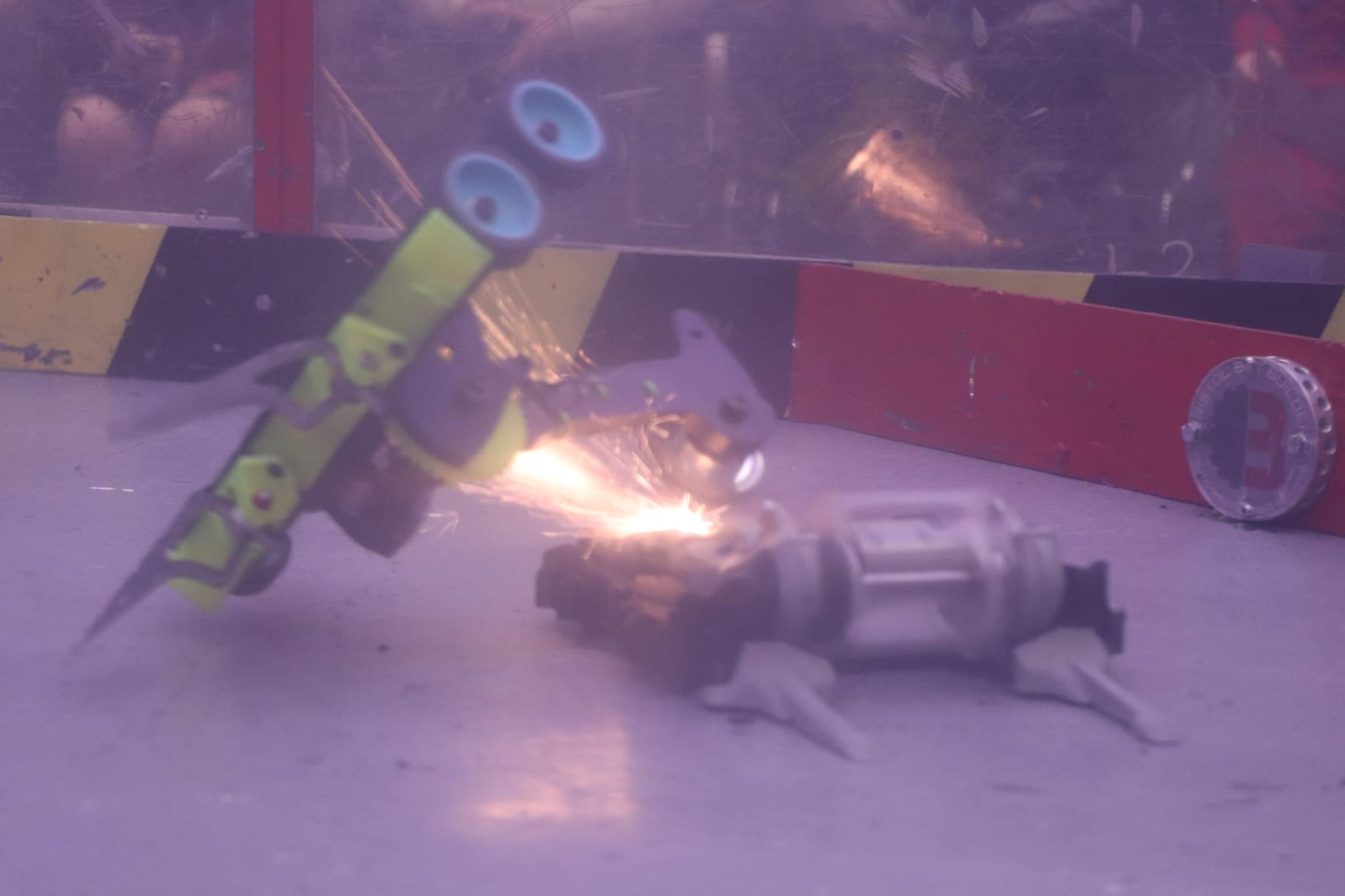
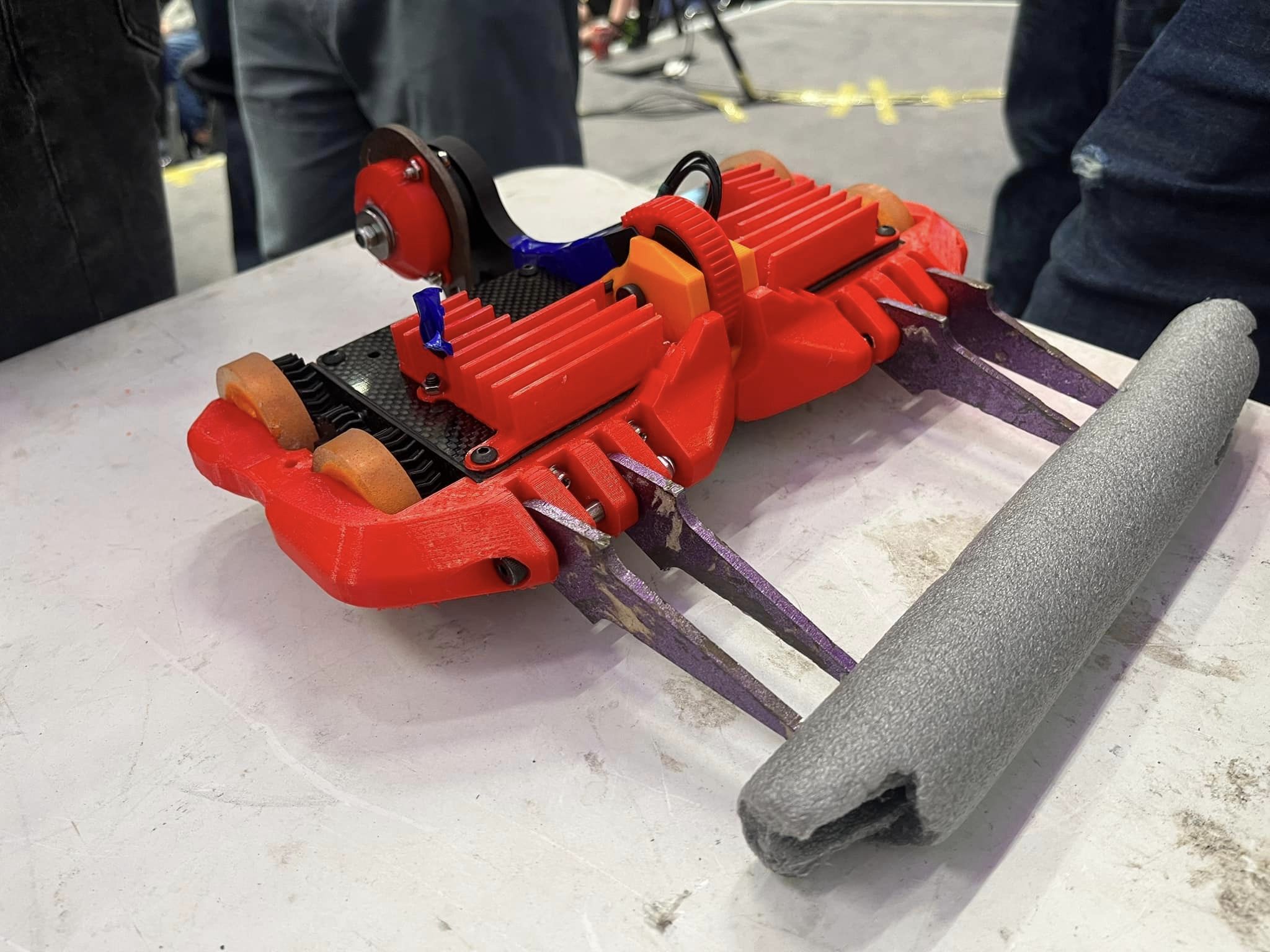
Finished robot before the first fight! The first round fight was against Ice Breaker, a tough scary vert which was unideal as a first opponent for a completely untested robot, and Sad boi, a bricky 4wd wedge. With the forks being super sharp to get under Ice breakers TPU front, I was able to throw both robots around and get a KO win, which I was happy and relieved by!

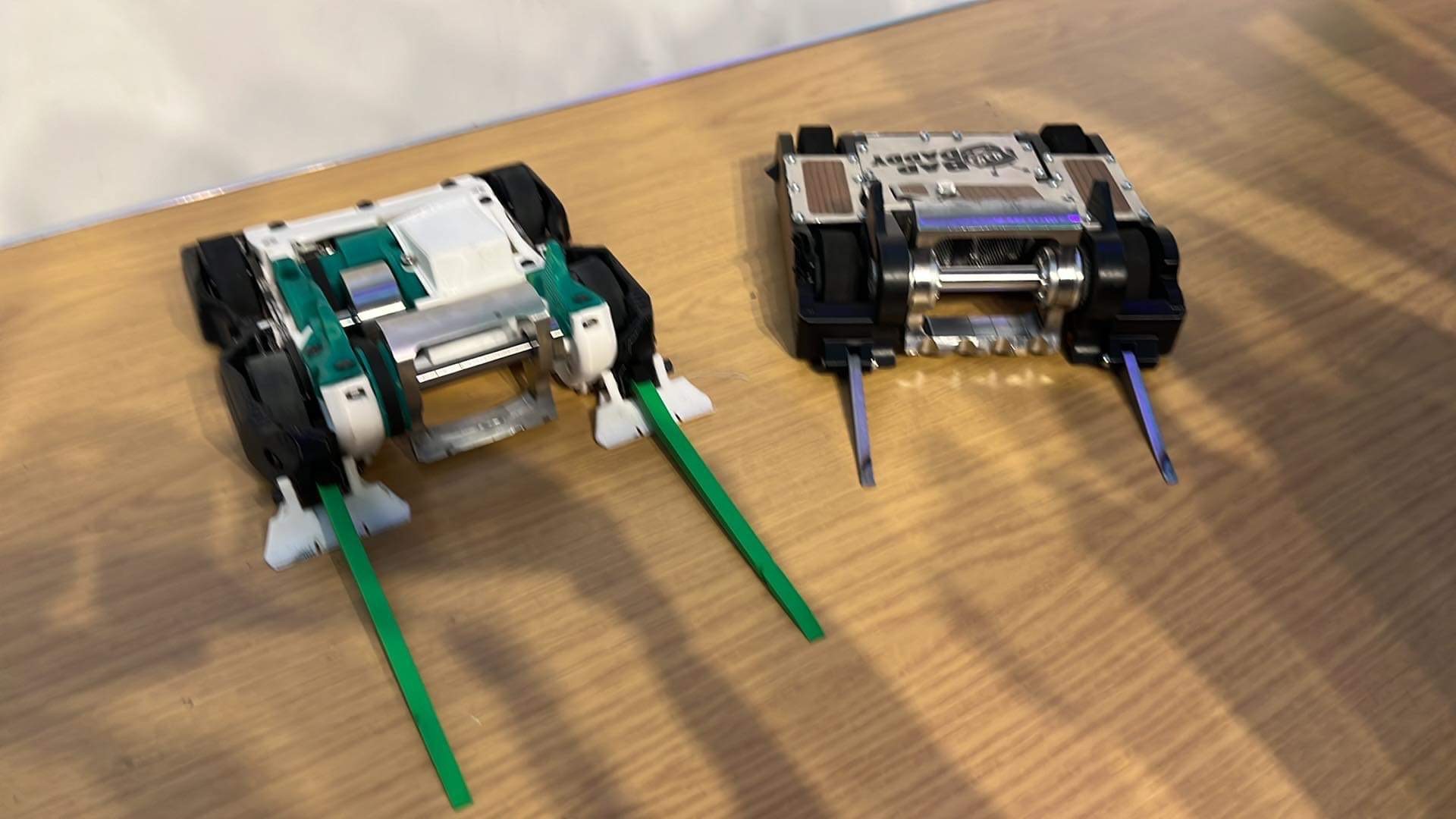
Little photo shoot of Propane next to Gizmo at the start of the day

The second fight (Ro32) was against Bad Daddy, a nasty looking beater not too different to my own. This ended up being a very entertaining fight, but with an eventual loss for Propane. I put this down to me slowing the beater down to save battery, leading to me losing weapon to weapon exchanges, as well as eventually losing my weapon entirely because of a broken print inside the robot meaning the weapon motor could flex and lose belt tension.
After a fairly brief showing in the main competition, I decided to test out my alternate armour configuration against a couple of horizontal spinners (undercutter and FBS) in a whiteboard fight. I had the same failure leading to loss of belt tension on the weapon, and the TPU got chewed up, but i was overall pretty happy with how everything held up.
That pretty much sums up the build and event for now! I am certainly in no rush to build a new beetle, and will probably keep tuning this robot for a while, the only things that needed replacing after the event was some TPU parts, which is nice and cheap and quick to do.
Cheers all for reading!