Hi,
Many of you will know me as the grinning mug who builds dumb robots which don’t work particularly well. I personally would encourage that description - I grin a lot, my robots are dumb, and they rarely work as intended.
This thread probably won’t be particularly coherent, but I thought it’d be a good idea to throw together a sort of CAD showcase for bots I’ve designed, tried to design, and failed at designing (or given up on). I doubt you’ll find anything particularly remarkable in here - most of my designs are echoes of smarter people’s ideas - but I hope that by sharing my scattergun approach to beetleweight design, I might be able to inspire some nuggets of ‘what if I did XYZ…’
First Steps
Okay, so I slapped together the OG list of recommended parts from the BBB site back in 2020 - ancient history unless you’re cool and you’ve done a hobby for longer than 3 years (nerds). That led to a plank that drove - very boring except for when I showed it off to my housemates and they all humoured me with cries of ‘oh wow, nice plank’. Lesson learnt, design something good first.
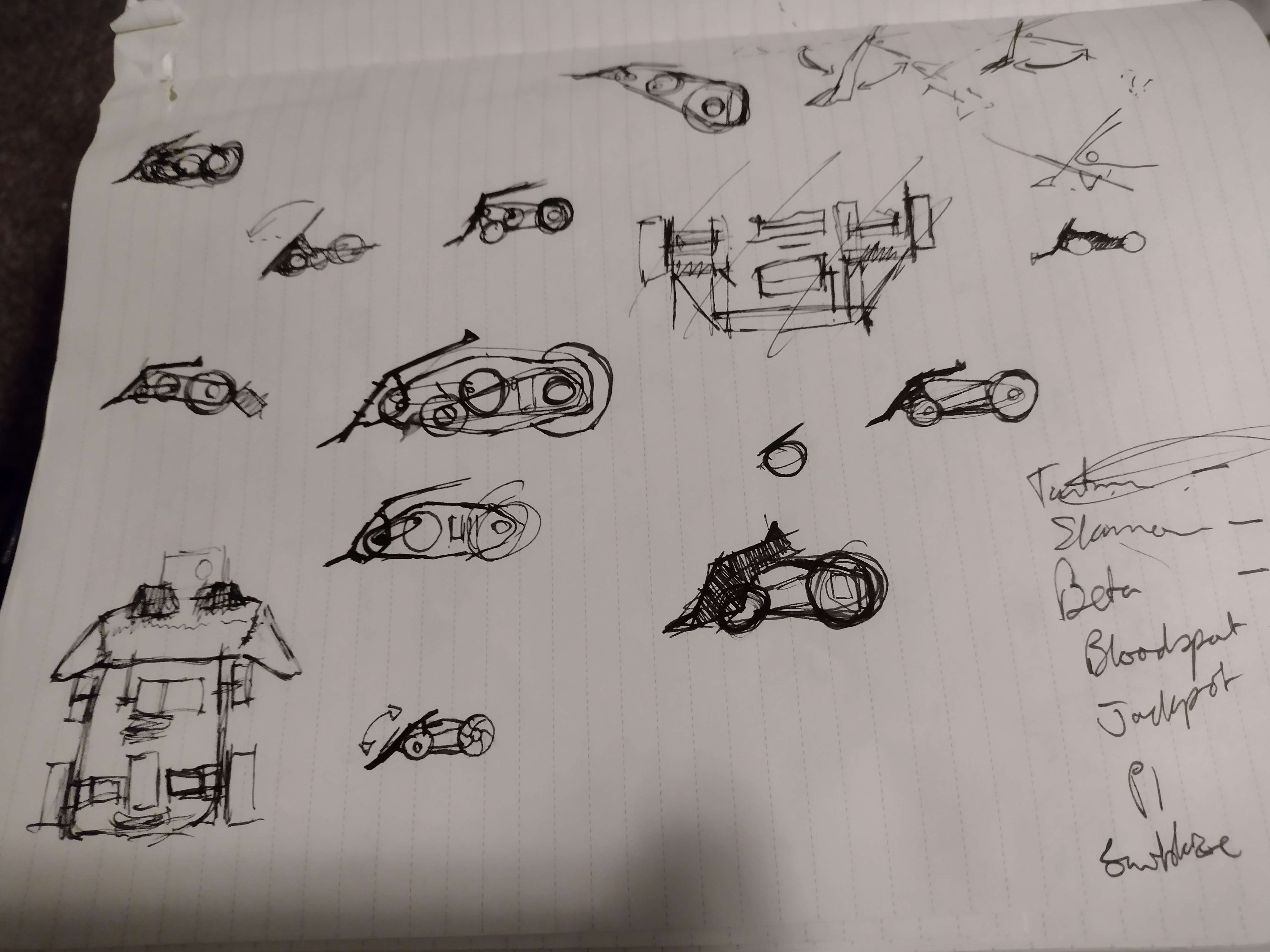
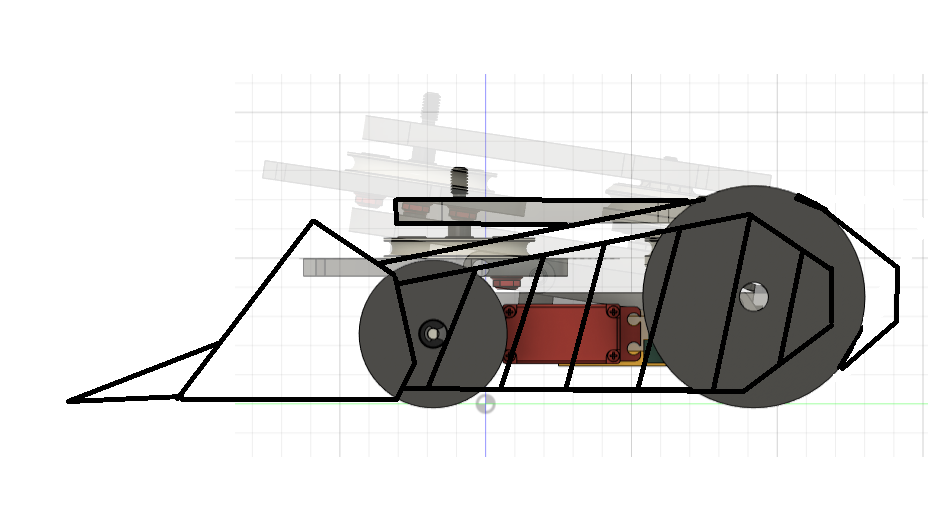
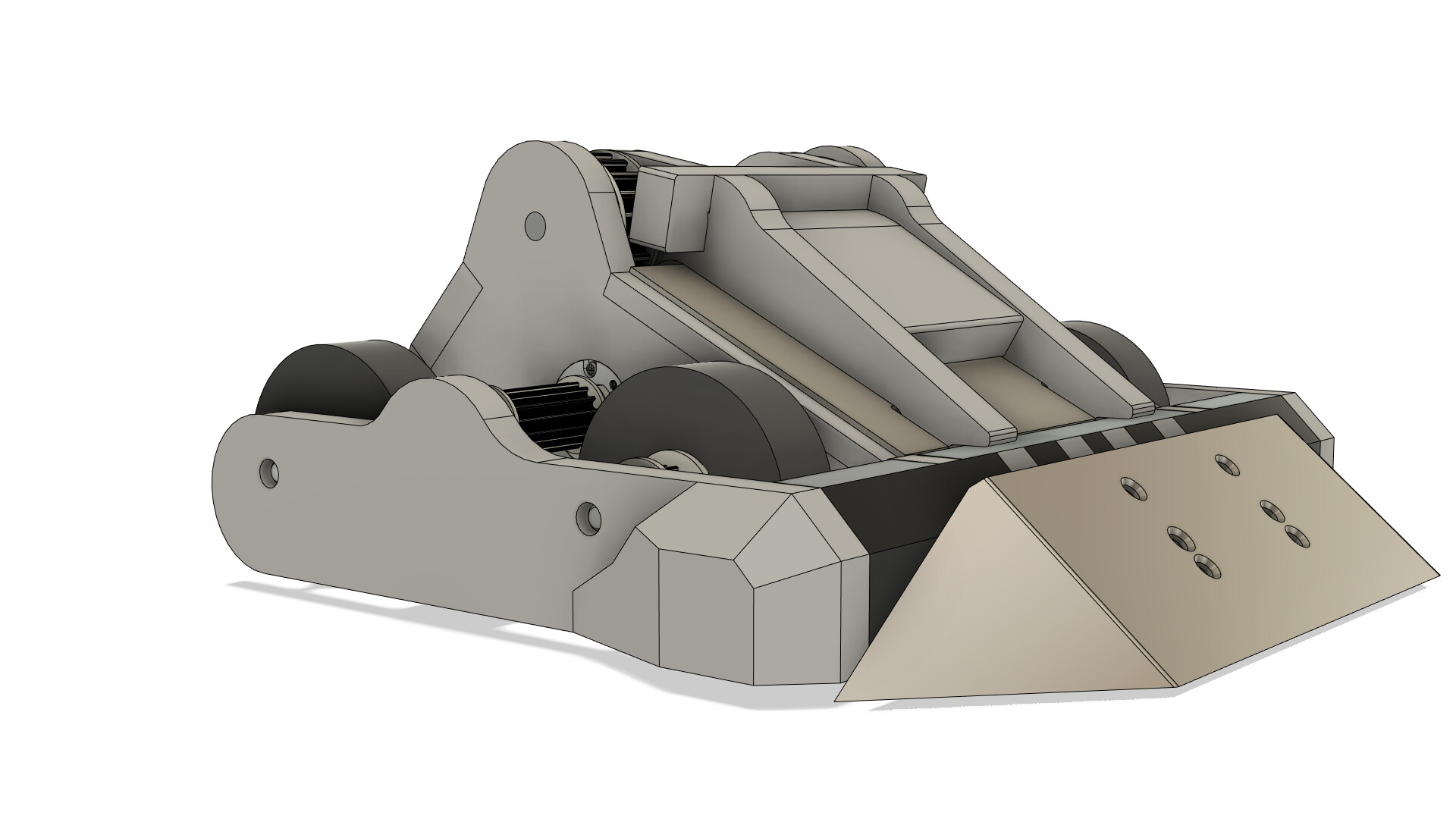
So, we come to Toutatis - named after the god of the Gauls from Asterix, but also conveniently the name of a beer. The earliest CADs I have are remarkably basic, but I learnt fairly quickly (it was 2021 lockdown and there was nowt else to do), and ended up with a couple of designs:
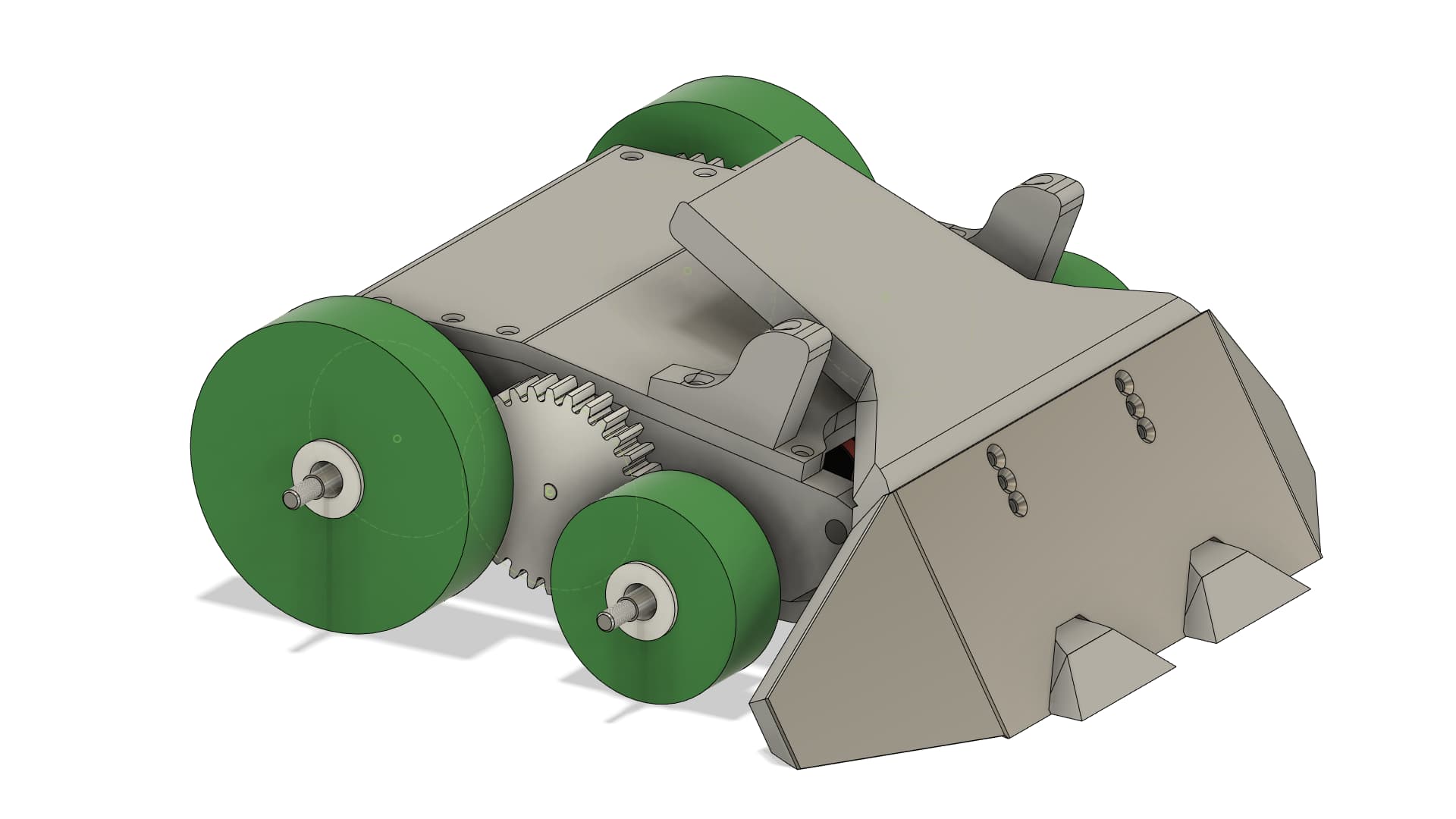
I opted for the latter to build - a case of ‘simpler is better’ (and also the wedge was a sensible angle).
The design was inspired by bots like Sandstorm, but used a servo actuated arm to push against the wedge and lever stuff up. It kinda worked in practice but I picked the wrong speed servo, so it was super torquey but super slow. I have never, ever, ever again forgot to read specs on components before I buy them…
Toutatis competed at Summer Showdown in August of 2021. The bot won its first fight because Sam Elliott can’t drive a train without treating every hole in the floor like a tunnel to dive into. In the next fight I promptly got stuck on my face vs Inertia. Fun design, shame it didn’t work.
NEXT!!!
Dumb Motor Ideas and Bad Simpsons References
Okay, so I got home from Bristol and immediately got given two 550s by a friend. Probably because it was my birthday a couple of days before and he’d heard I was into RC stuff now. Maybe he just didn’t want the things in his life anymore. Either way, I had to do some CAD:
Gopnik! Gopnik was a very stupid idea, a tiny amount of reduction through tiny modulus nylon gears to try and drive a big titanium wedge at other robots - a sort of D2 on steroids. I don’t know if it’d work and I’ve not spent the time or money on it to find out. The generous gift of two 550 motors sits safe and sound in my big box of parts. NEXT!!!
Shortly after designing Gopnik, I cycled around the isle of wight. That’s completely irrelevant to the next bit of CAD but I’m still proud of it and I’ll be damned if I’m not gonna milk it to the best of my ability.
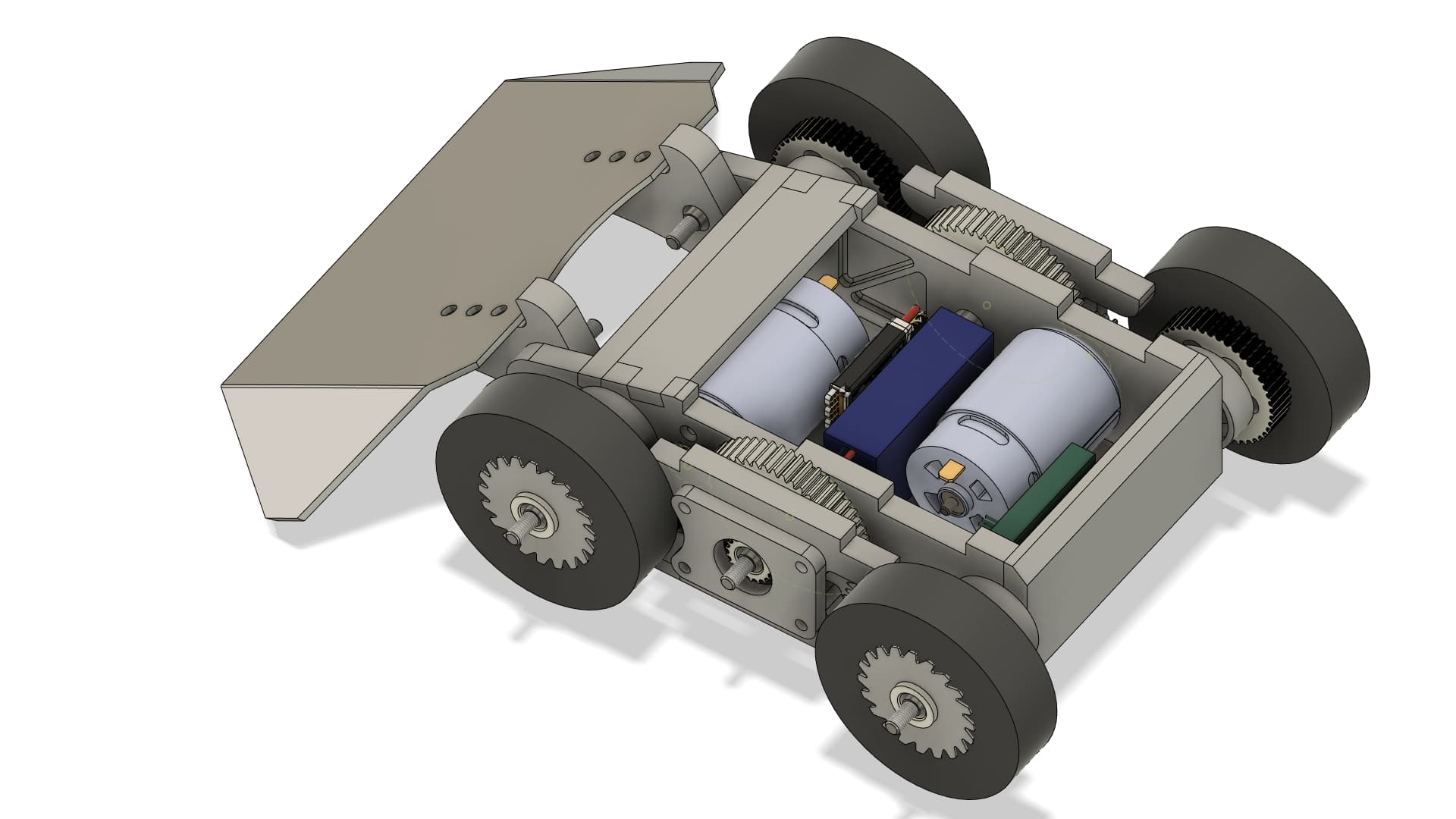
Shortly after cycling around the isle of wight, I got hooked on a youtube channel called ‘Dankmus’, run by a deranged individual who chose to spend his spare time remixing Simpsons quotes into fun songs rather than burning money in a furnace or building combat robots. In particular, the song ‘H A N D S O M E P E T E’ had me hooked. To me though, there was only one thing handsomer than Pete: The recently released ‘BLIP Reveal’ video from Seems Reasonable robotics. I’m sure you can see where this is going:
The influence is pretty apparent, I feel. This was the first time I was designing a bot for use with my brand new 3018 CNC router, a tool that sounds far more impressive than it actually is (it actually is a pain in the arse but, we move.)
Everything slots together nicely, all the holes are in the right place, and it’s reasonably easy to repair, and all of that is a result of the hours and hours of me cutting parts and trying to get them to fit together and them not working! This has been a theme of my builds since the very beginning!
Handsome Pete, as this little nugget of a build came to be called, did terribly from a results perspective but did very well from a motivational point of view - I almost lasted 3 minutes vs Igor and Saw Loser 2 and met a bunch of lovely people in the process, and I generally had a good time designing and building the thing. Shame it didn’t work. NEXT!!!
The Wider Side of Life
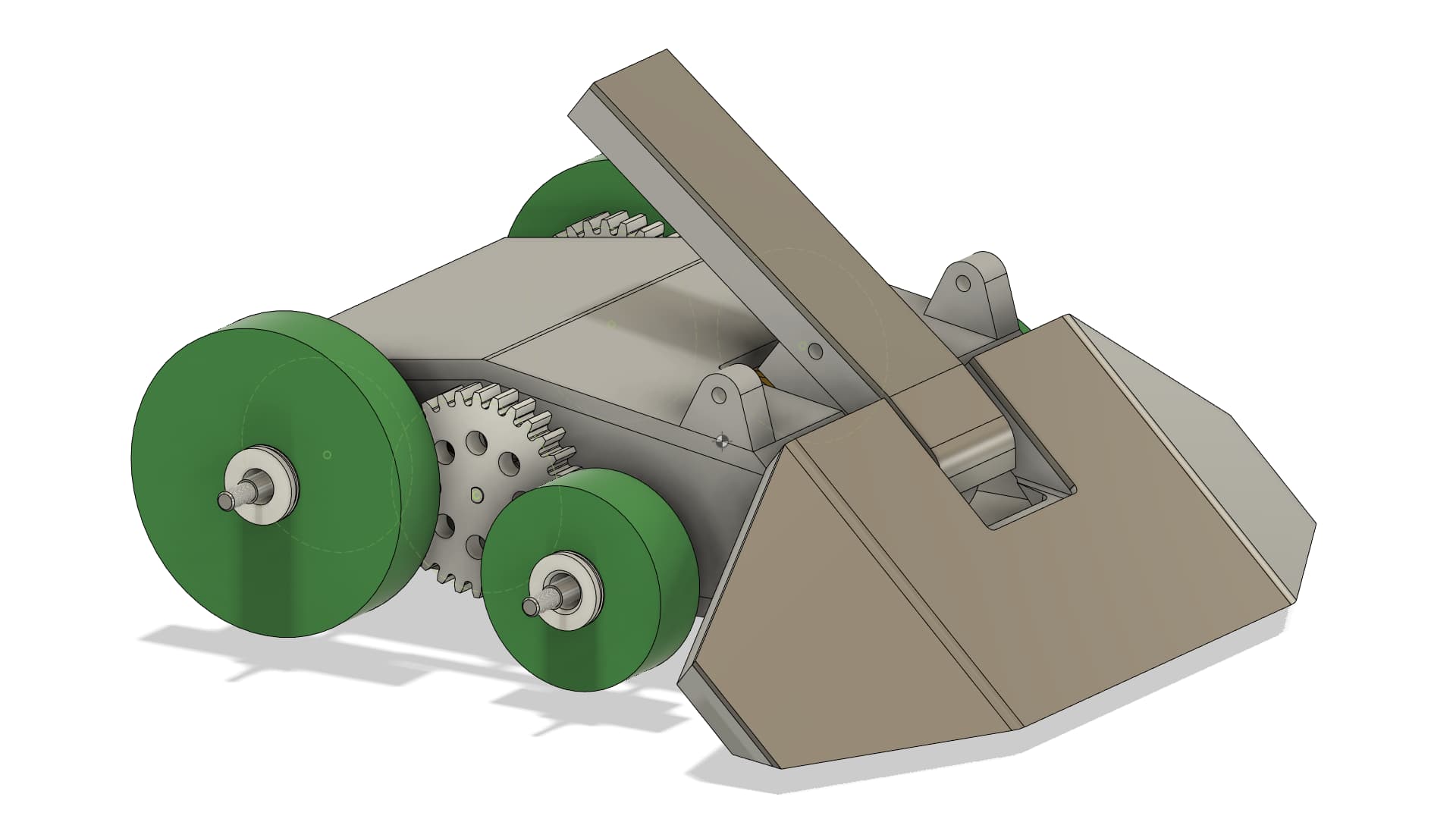
Craig Croucher, the loveable rogue, had built a new Mr Cat’s Mouse House. It had 4 wheels and they were all along the back and gosh darn if there isn’t something so appealing about having all your wheels inline. I wanted to do something like that. And Daniel Kerrison of Australia had build a tiny little 150g ant with a jaw that rotated sideways and turned stuff over and I wanted to do something like that.
So I did.
Grapple Turnover is the world’s first beetleweight robot with a horizontal (?) rotary lifter and 4 wheel inline drive, which is themed after a particularly tasty bakery item. It’s my best name yet, I will never outdo it. It did alright at BBB Brawl, losing both its fights but getting an OOTA in the first and giving Igor a good going in the 2nd. I can’t have been too down on it cause i took it to Rapture (with a few improvements:)
At Rapture it did even better, going 2-2 in its pool and actually getting a grapple-turnover against Voltageist. Didn’t win the subsequent 3 way draw, losing to Sam Elliott (he having learnt that, in the absence of a train, a drum was more his style), but nonetheless I was very happy with the Grapple. He’ll be back one day. NEXT!!!
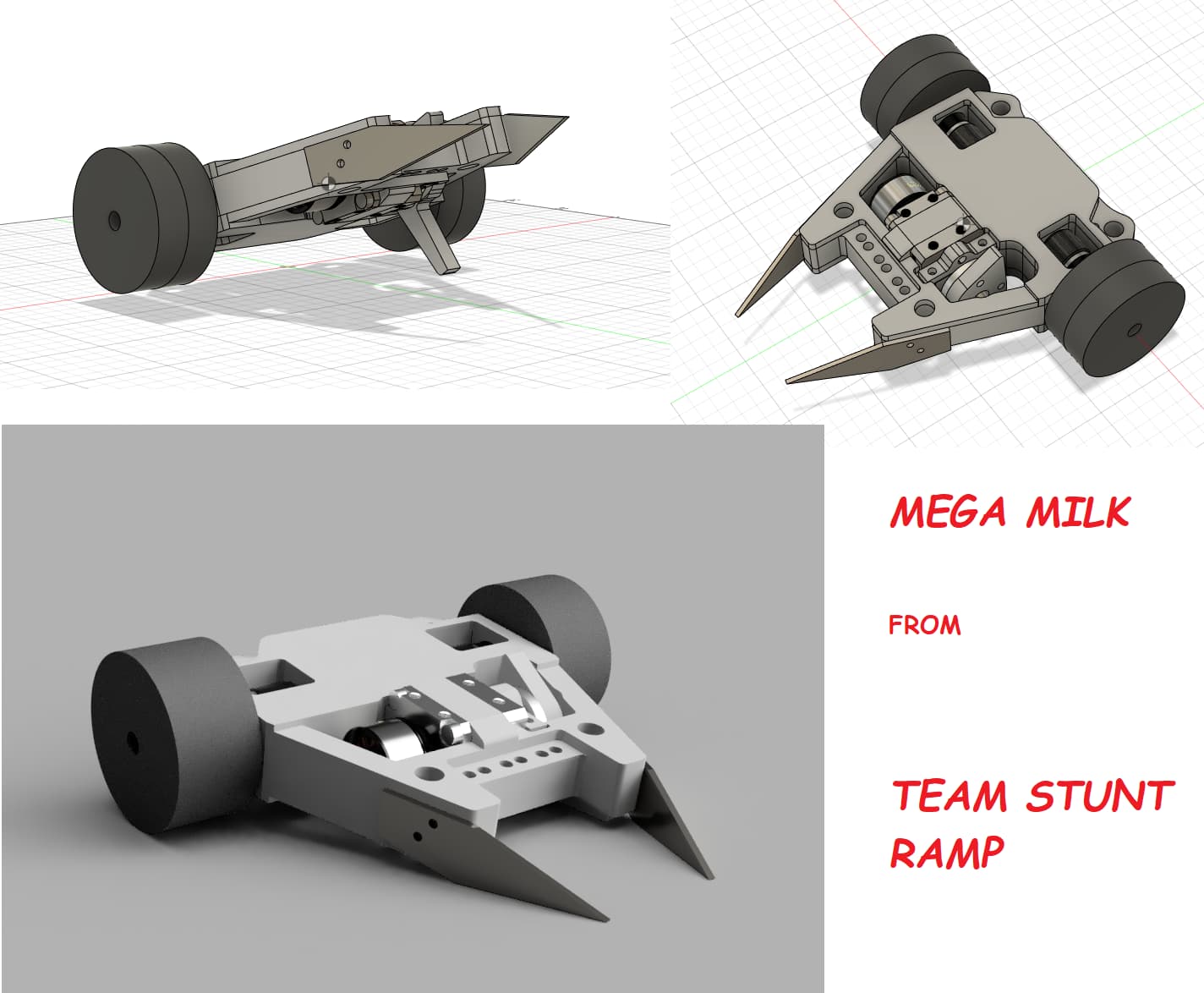
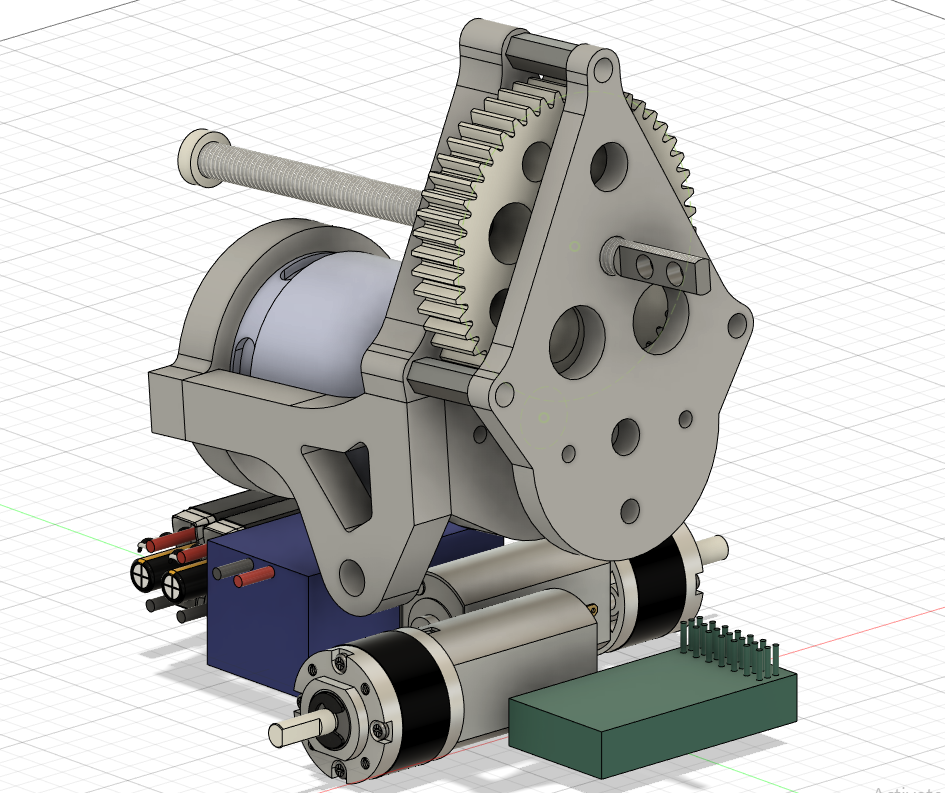
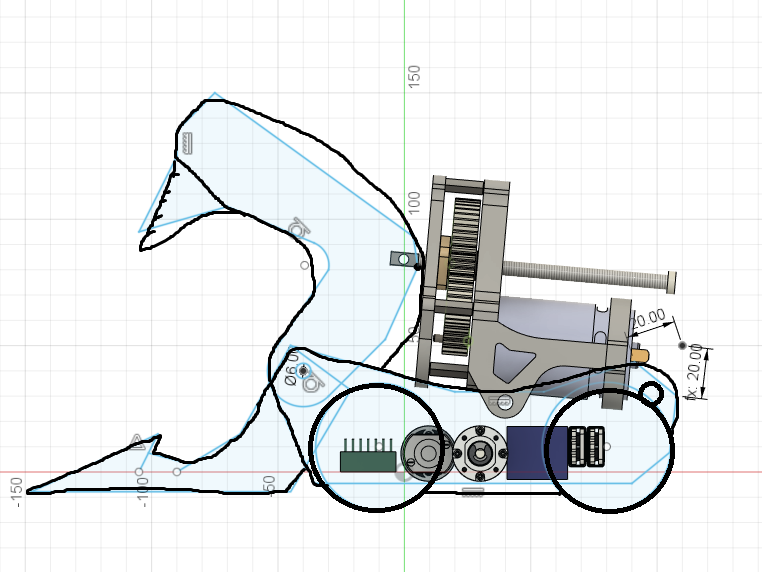
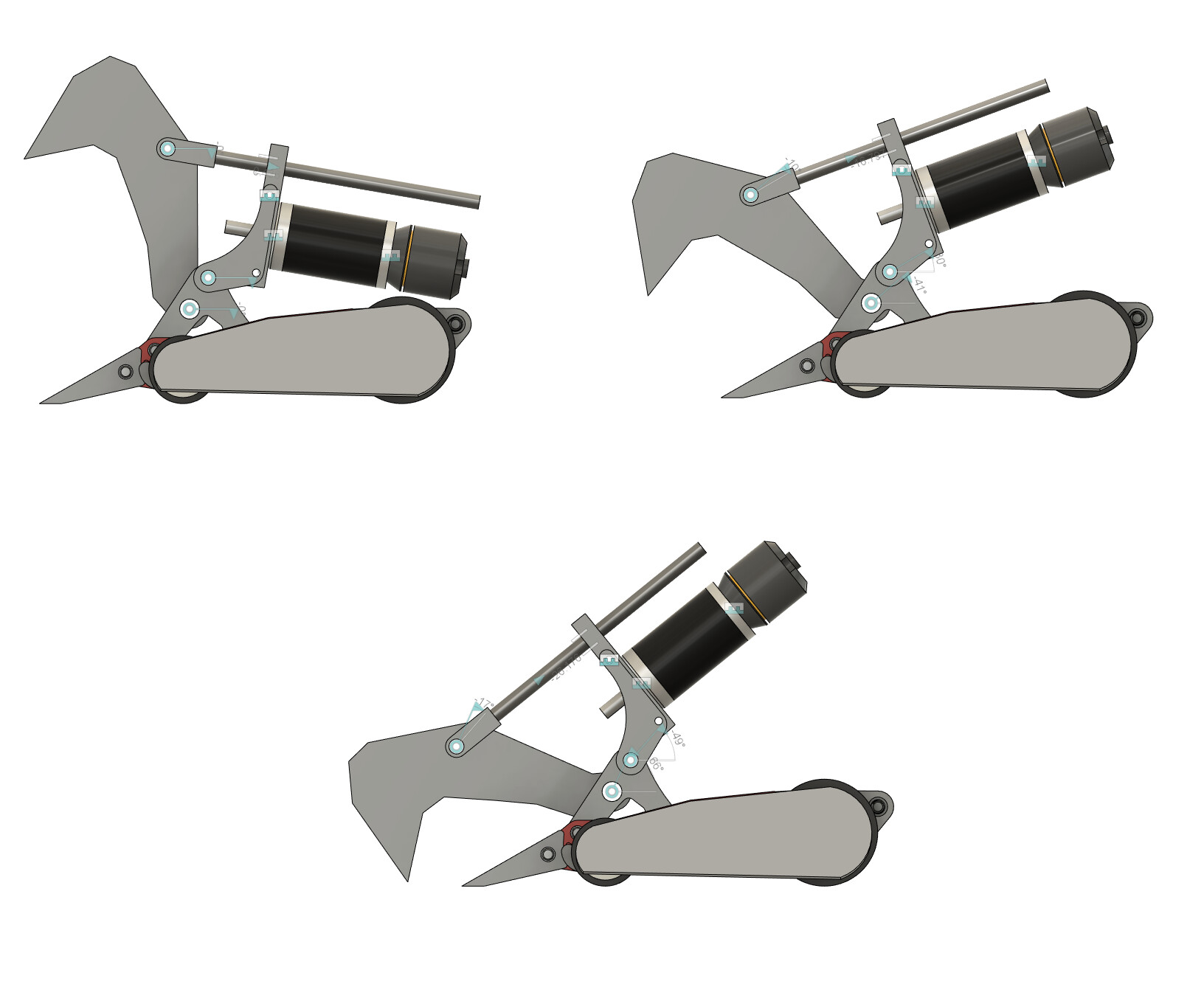
Stuff I didn’t Make
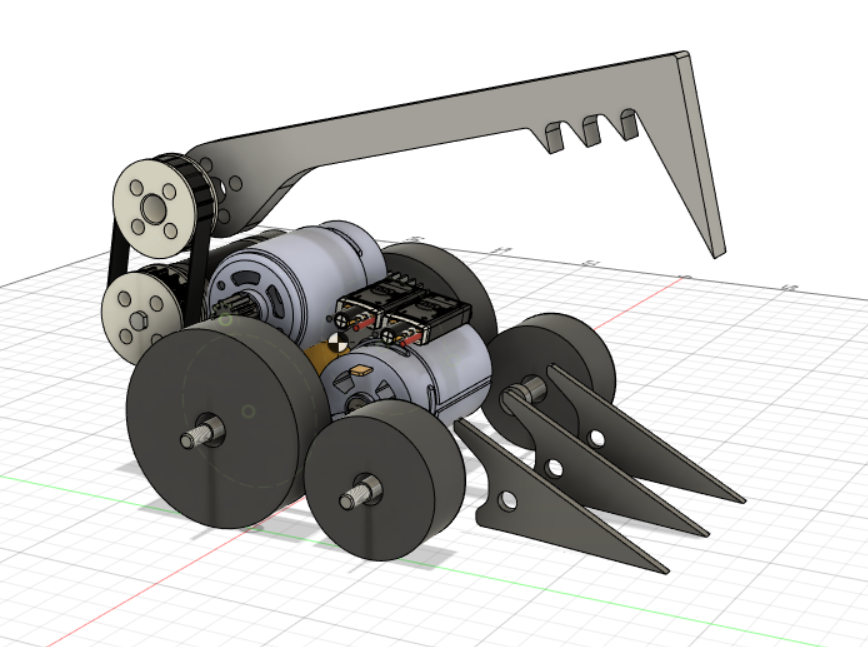
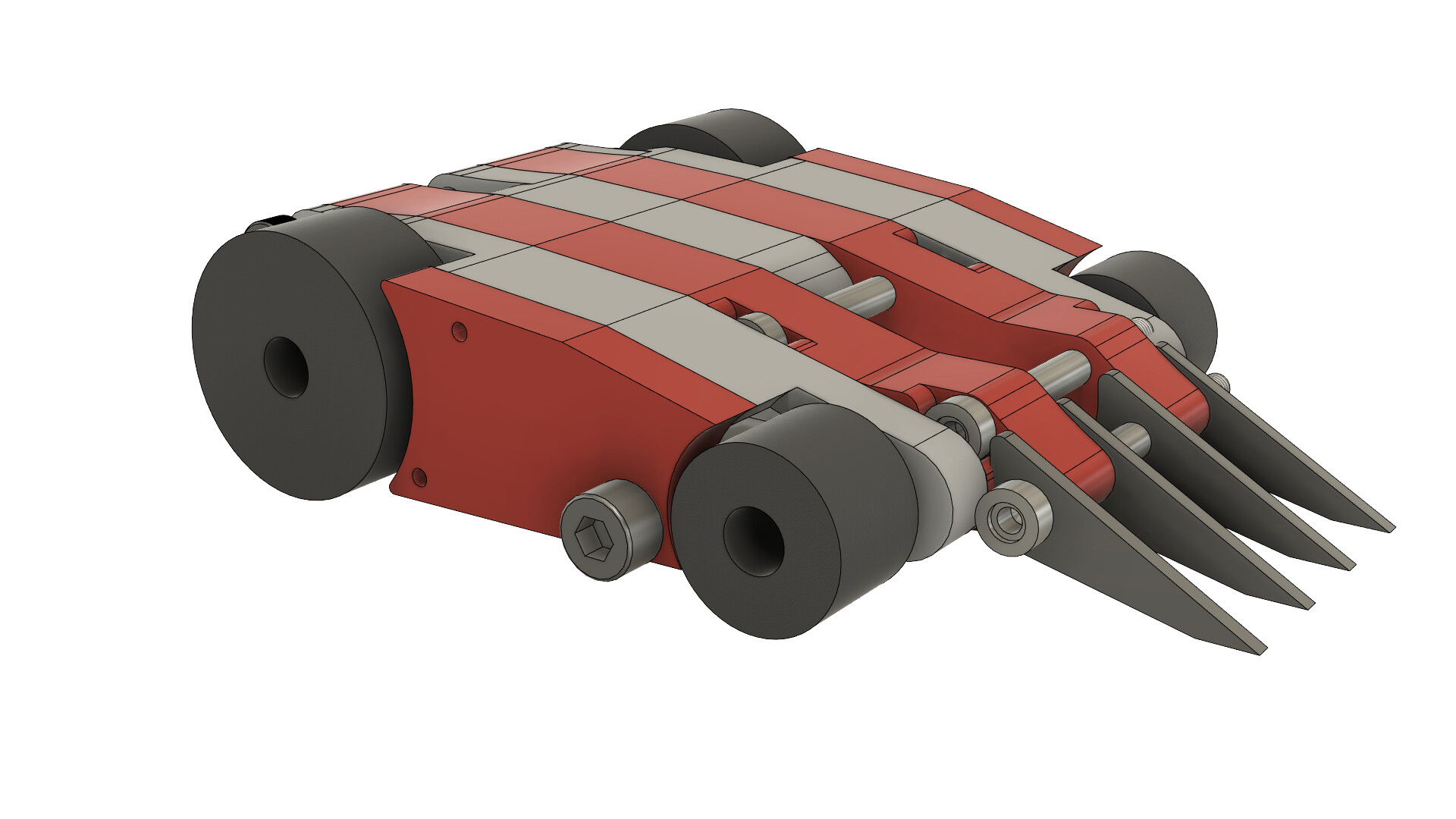
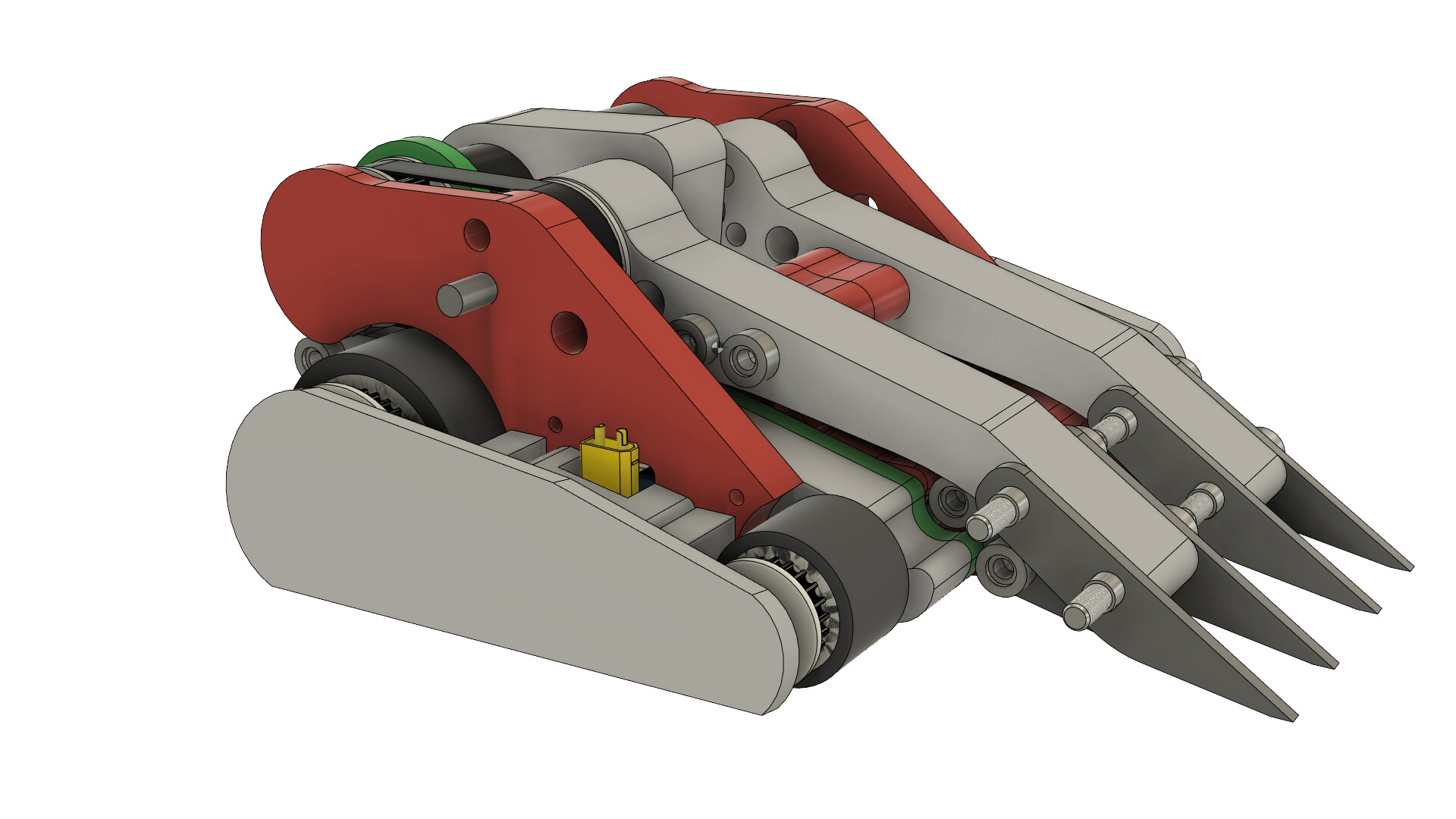
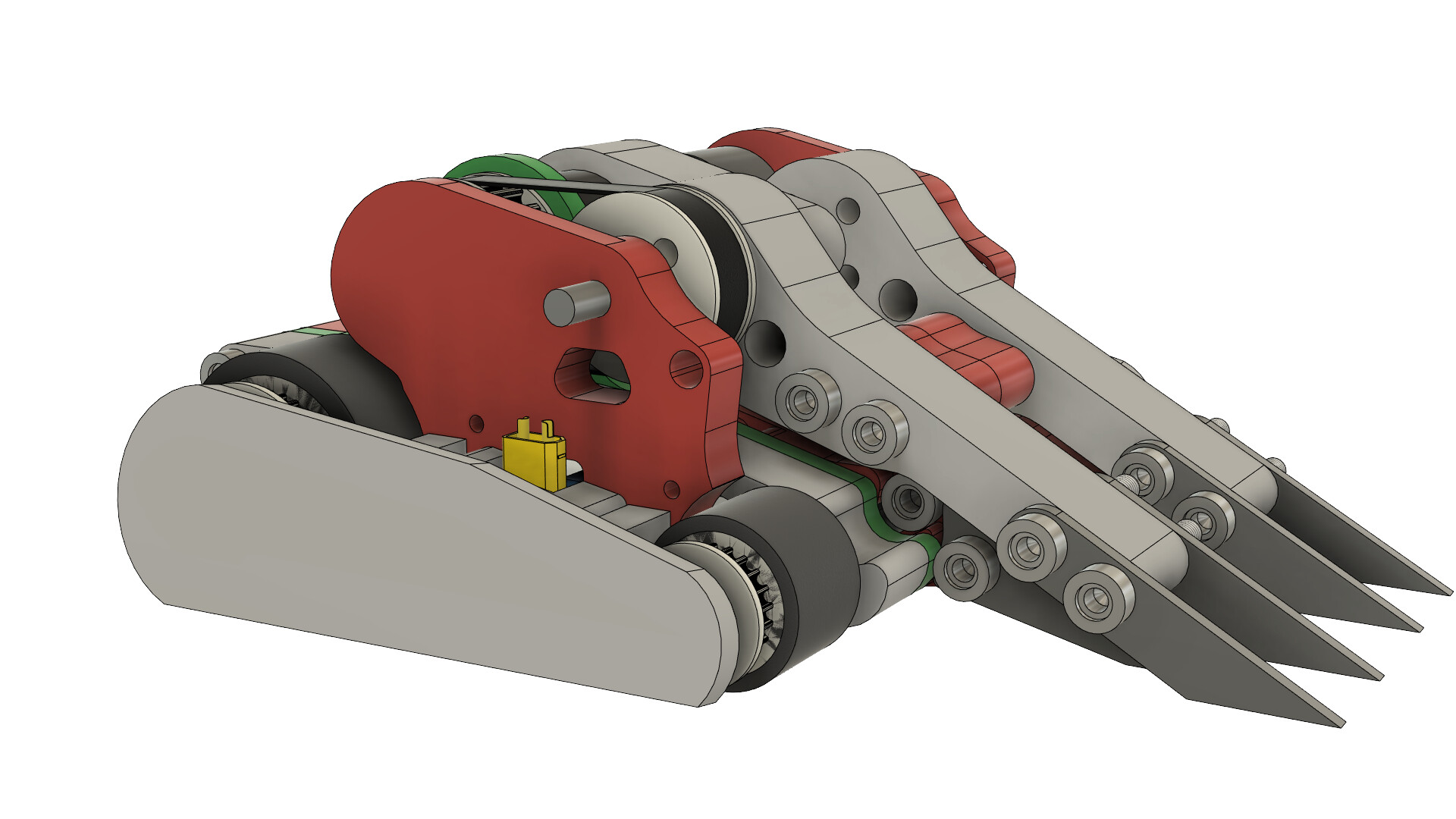
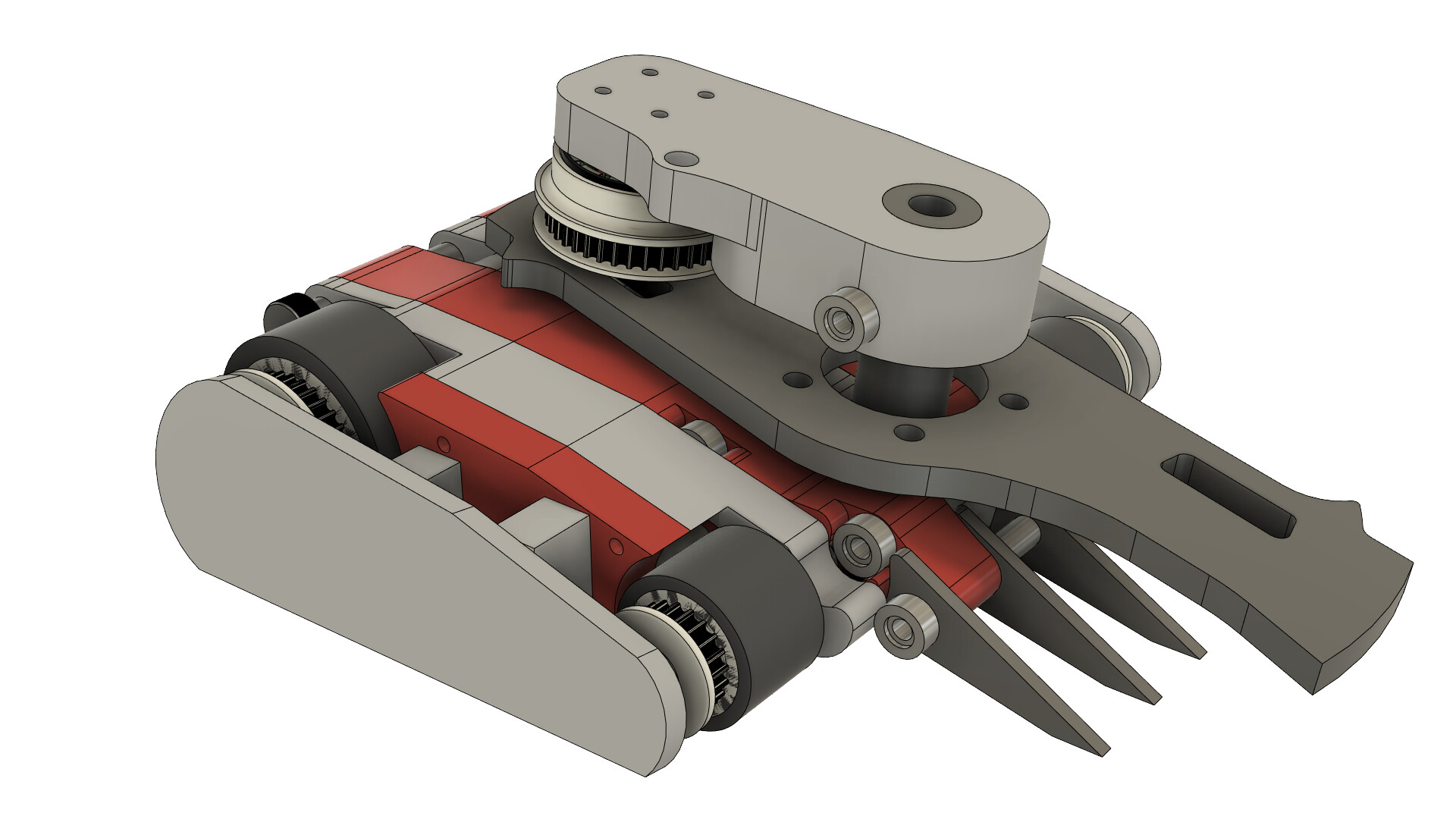
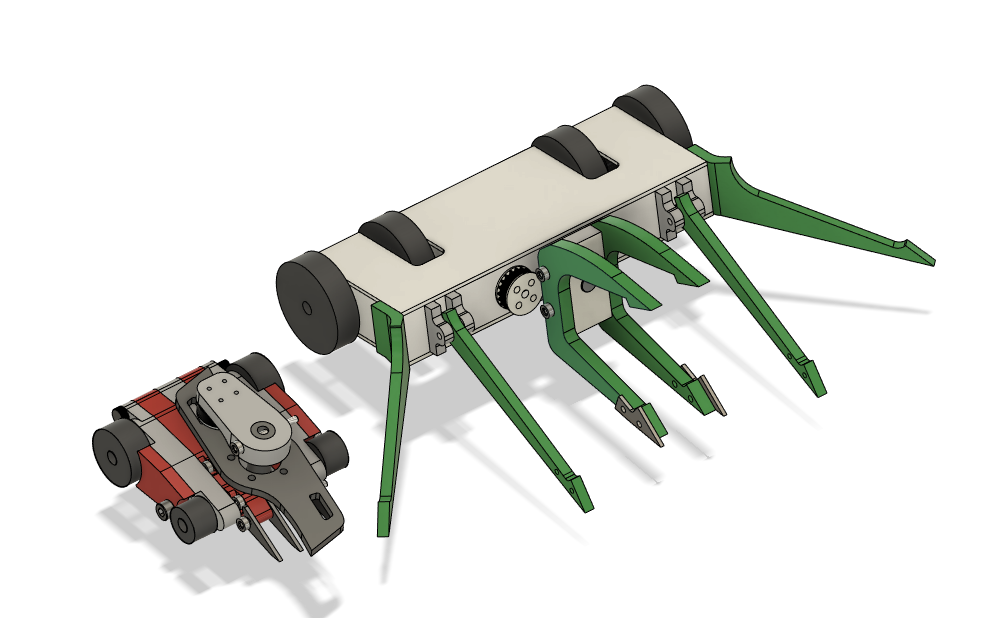
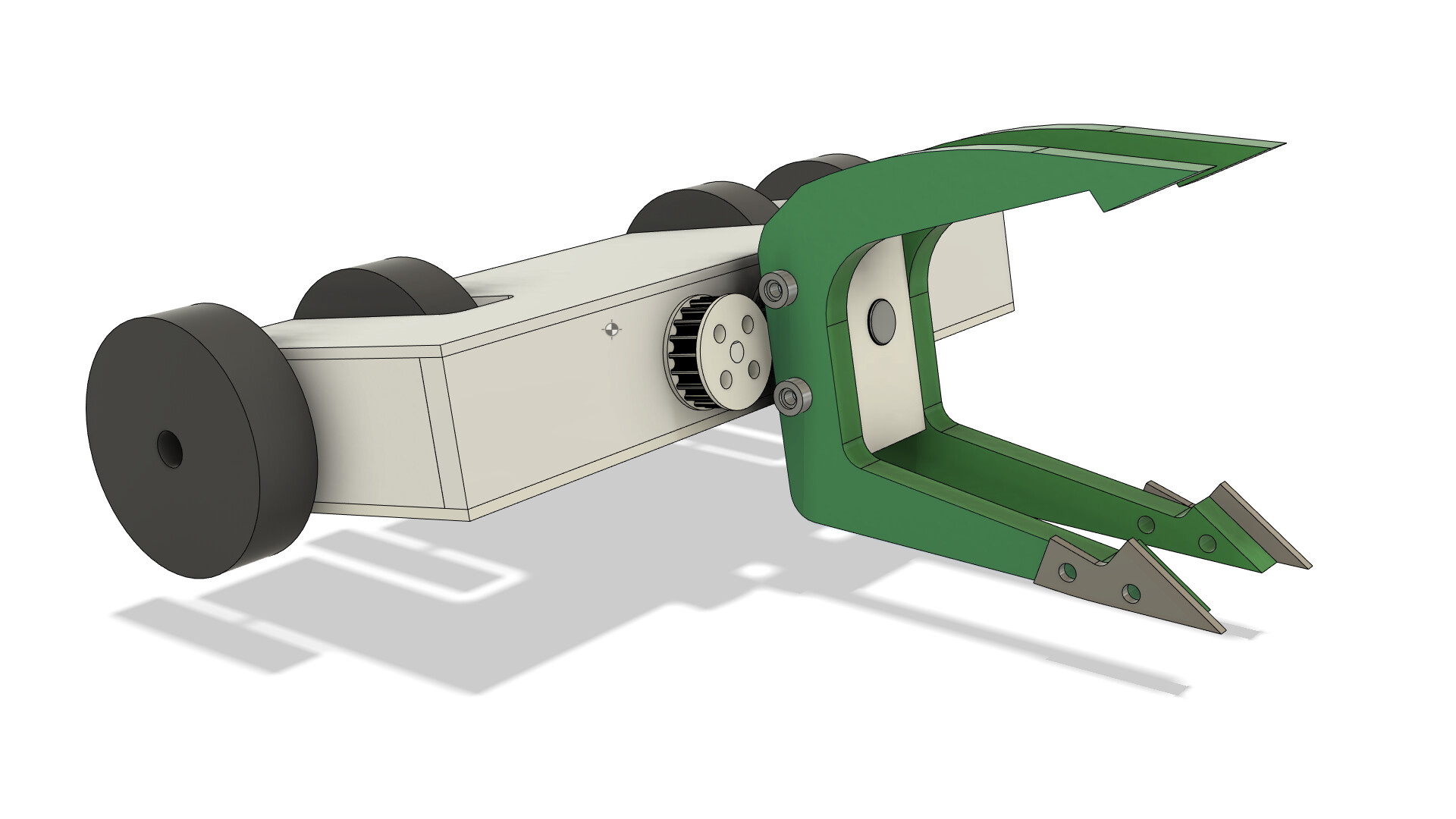
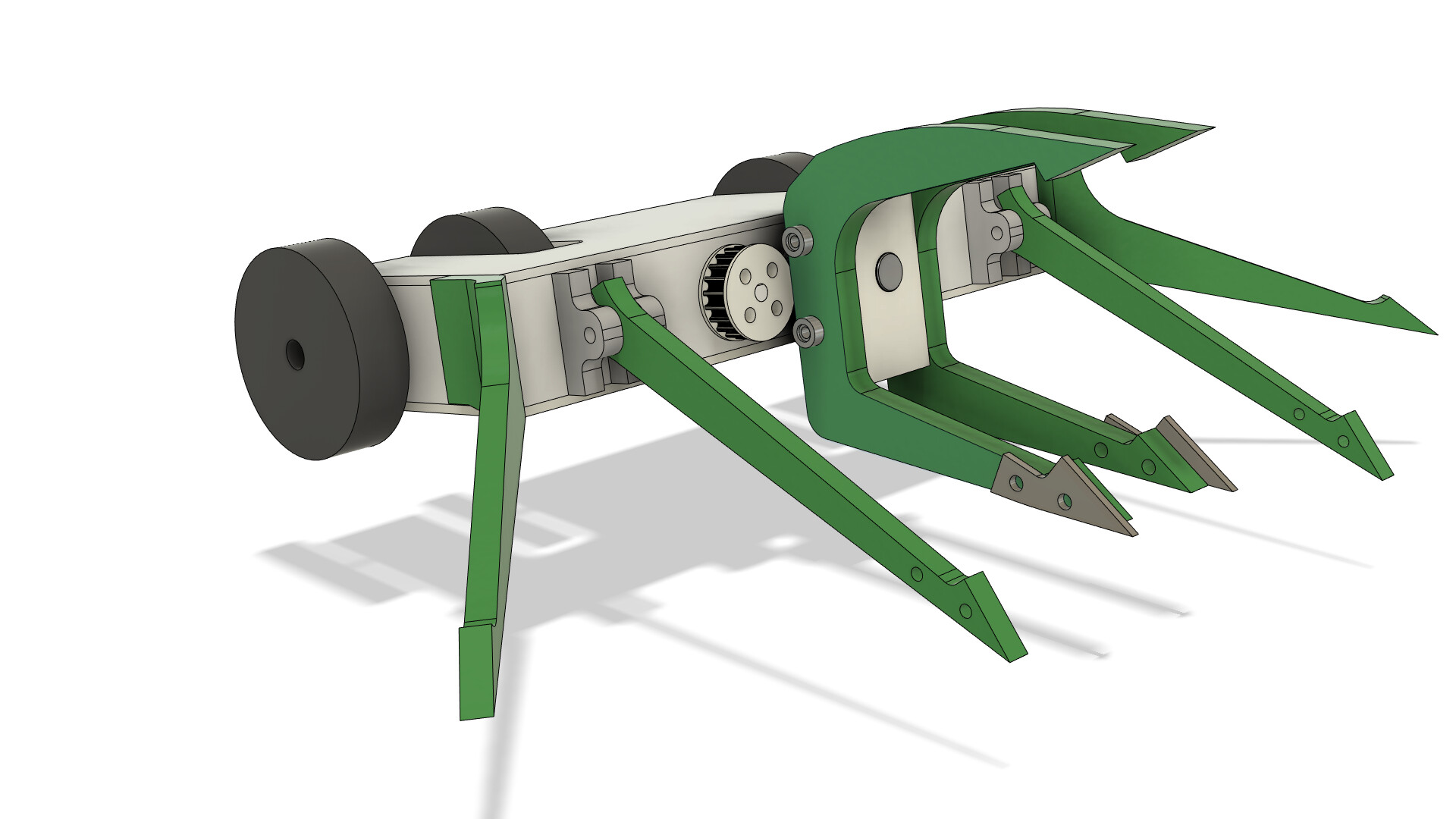
I designed a grab-lifter:
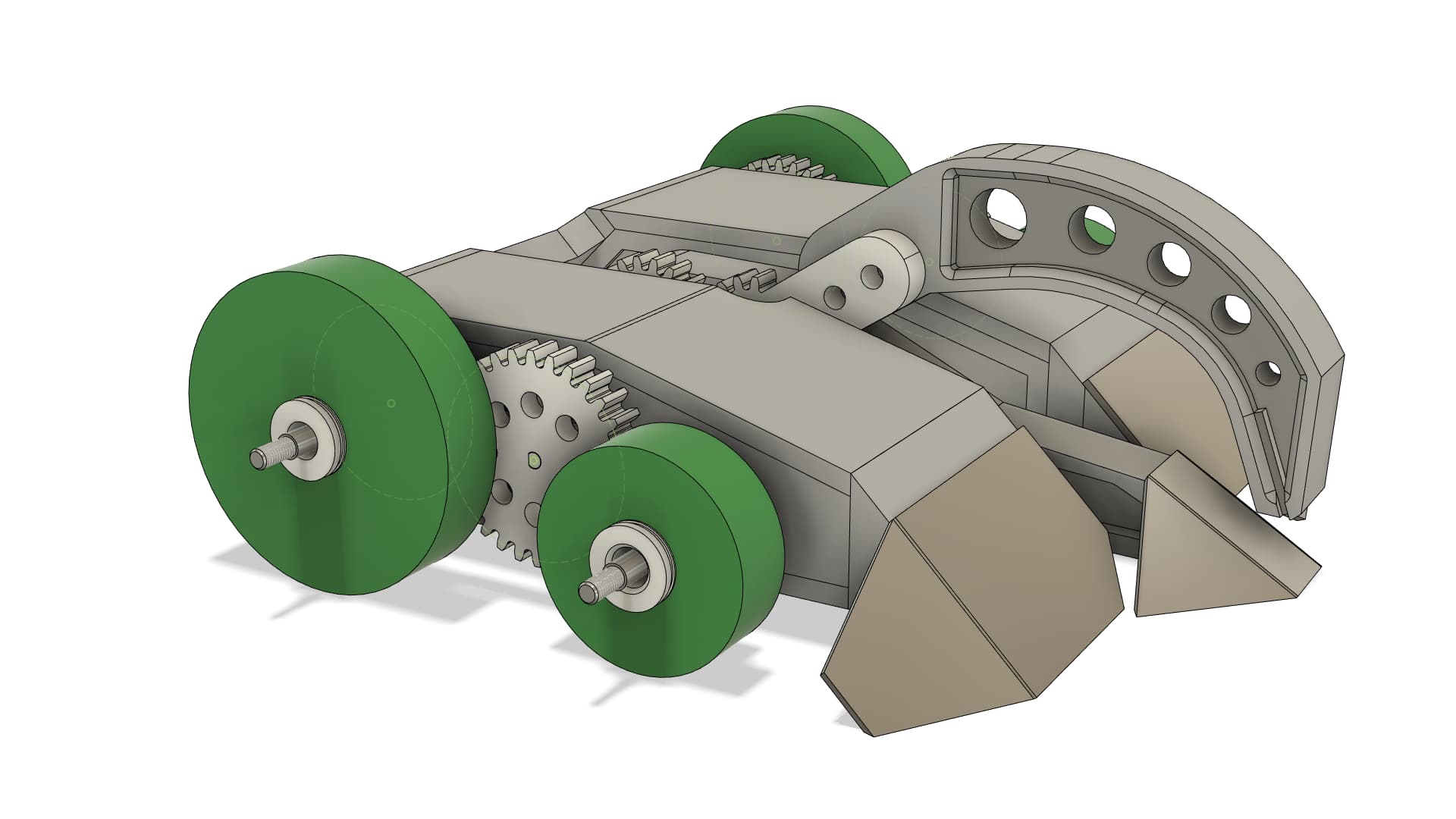
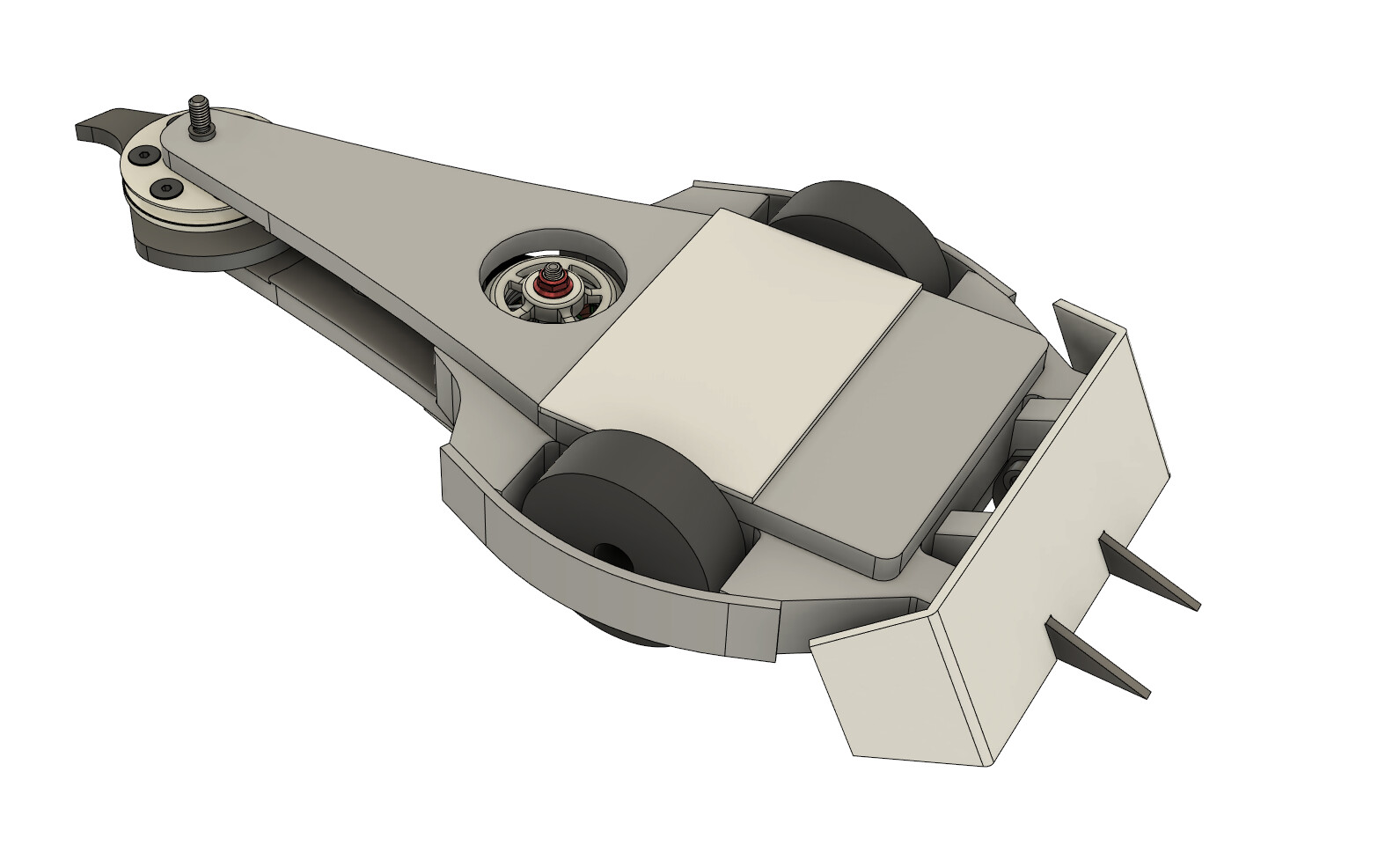
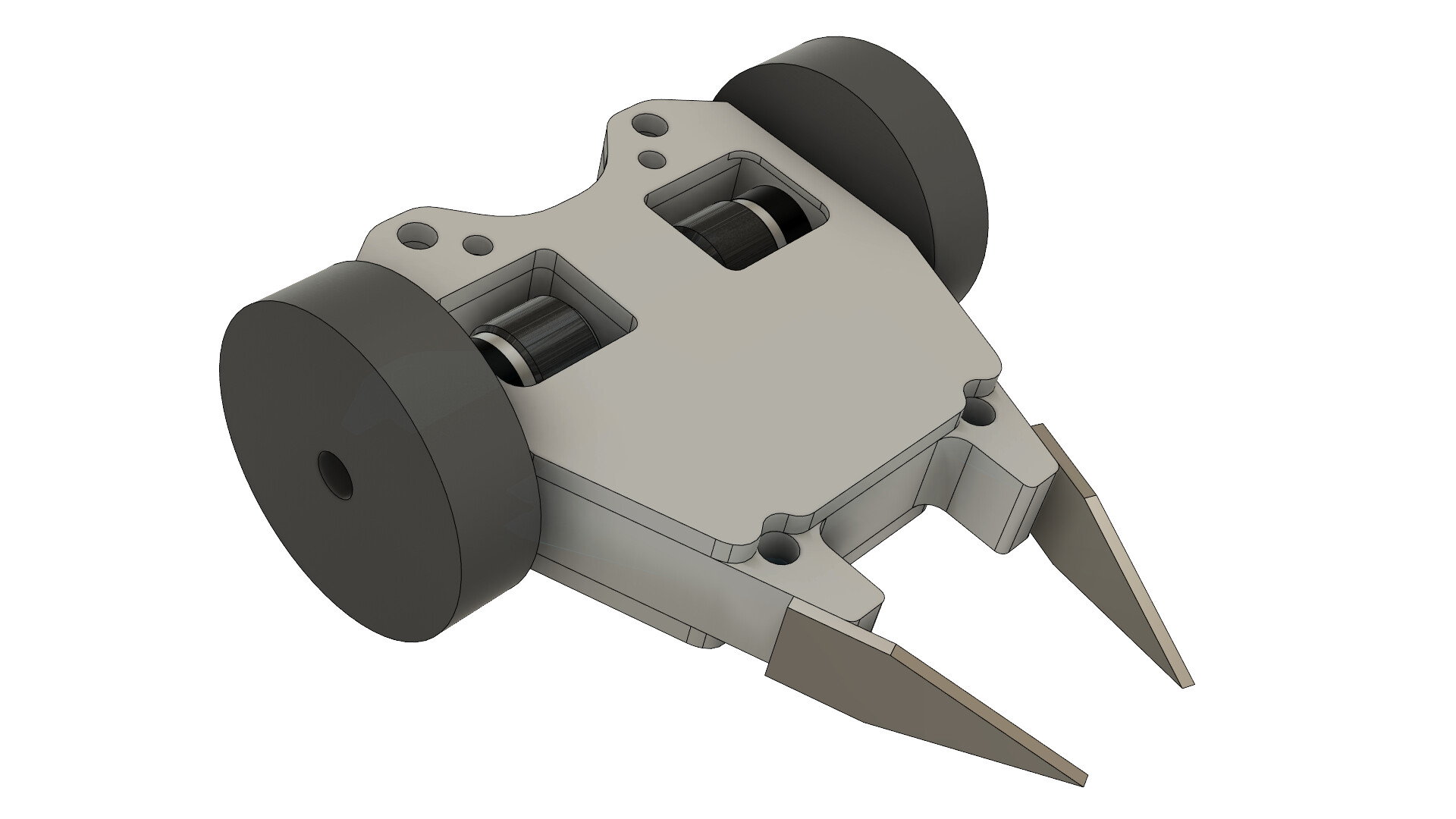
And another grab-lifter:
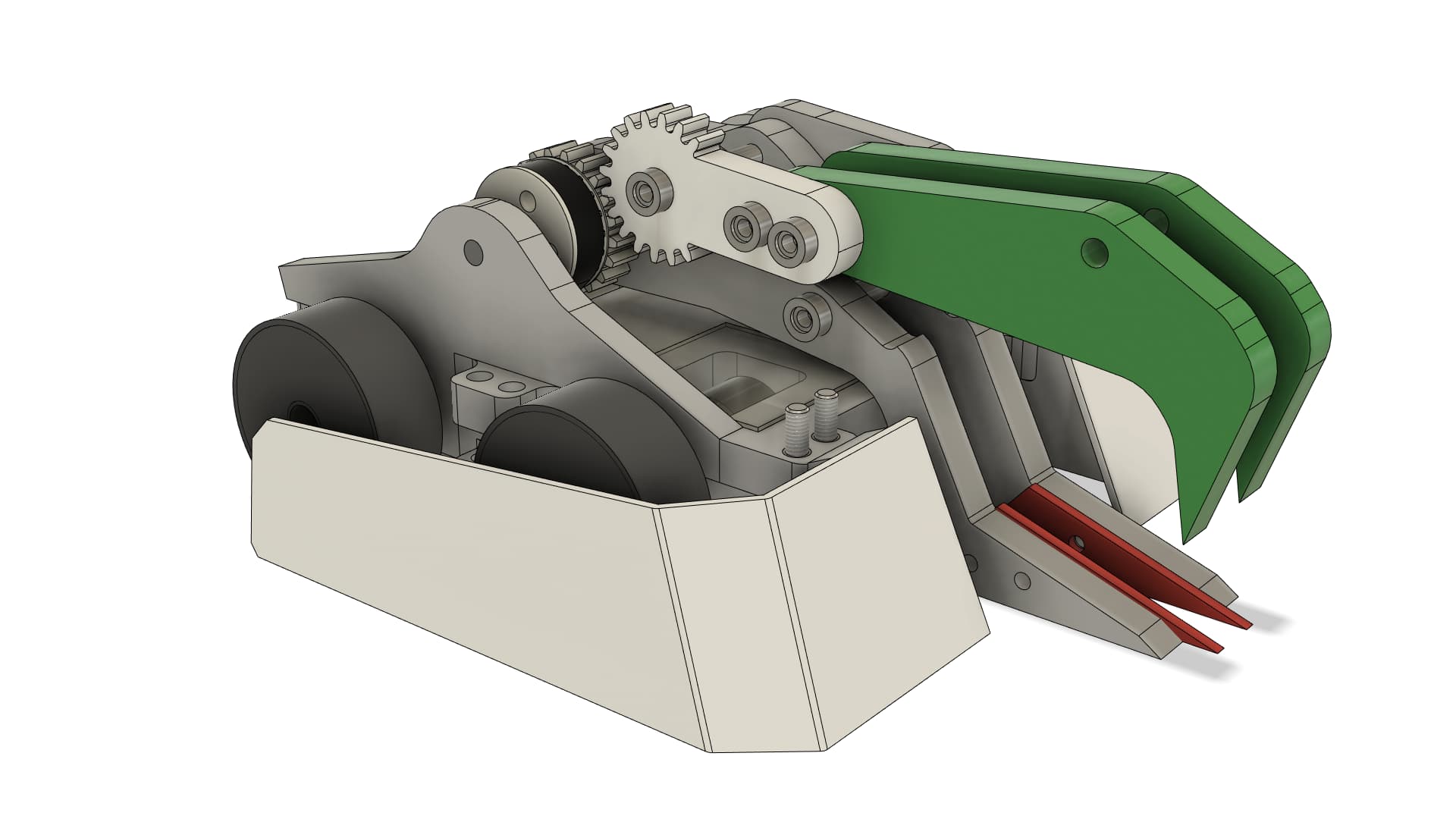
I’m waiting on the lucky third Grab-Lift design that makes it.
Okay so, that’s basically a year of robot design and it’s late and my Fusion client keeps crashing when I try to open old bots so, I’ll update this later with 2022-23. Hope you enjoy, or that it’s at least interesting. If it’s not, I don’t know what to tell you. You could be anywhere else on the internet.