I thought it was finally time to write my first forum post, here goes!
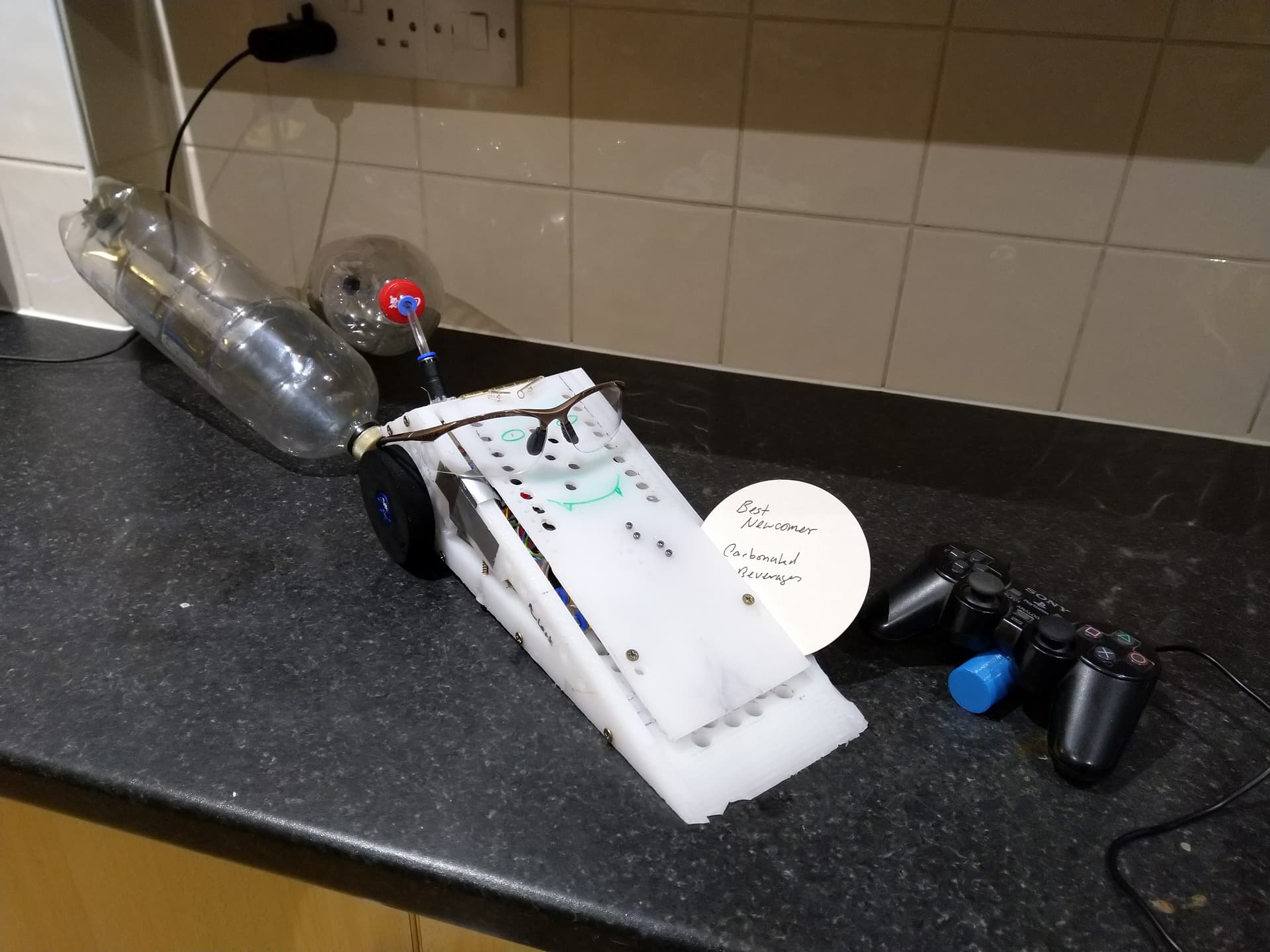
Carbonated Beverage V1 (a.k.a. Wheely Swiss Cheese)
Design and Build
I built the original Carbonated Beverage for BBB Beetle Champs 2022. The inspiration came from watching Tom Stanton’s videos making an RC plane powered by compressed air stored in pop bottles. I’d been faffing around ineffectually with designs for a spring flipper and decided that pop-bottle based pneumatics would be way more fun.
It quickly became clear that there was no way an antweight could accomodate all of the necessary gubbins so it was time to build my first beetle!
The design for V1 was focussed around a single objective: pack as much yeet into the flipper as possible. This meant two things:
- Having a lot of force behind the flipper.
- Having a big arc on the flipper to apply that force over the largest possible distance.
First, force:
The beetleweight rules limit pneumatics using non-rated components (like pop bottles) to 50psi, meaning I’d need an area of at least 300mm^2 meet my lofty flipping objectives (this would give me 100N). I couldn’t find an off-the-shelf gas cylinder anywhere near this size for the kind of money I was willing to pay, so I decided to fabricate my own.
I ordered some plastic syringes and some pneumatic fittings and made this:
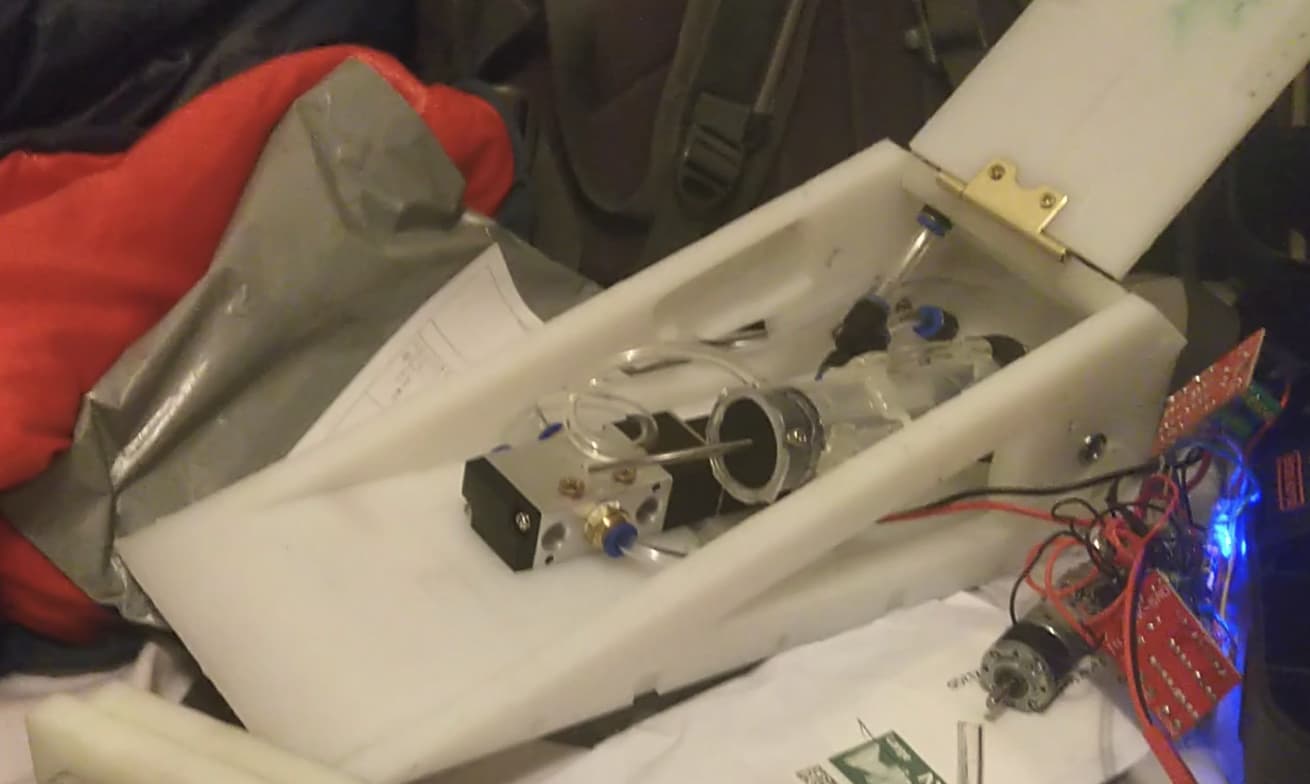
…not the world’s best photo; I’ll see if I can edit in a better one later.
Getting it to work was surprisingly straightforward. The hardest part was finding an effective lubricant. After trying PTFE, graphite powder, WD40, water and the oil I use for my bike chain, all without success, I gave up and set the problem aside. A few days later I was washing up when inspiration struck. A couple of drops of fairy liquid did the job perfectly!
The internal area of my cylinder was just over 600mm^2, giving it a theoretical force of 200N (~20kg) at full pressure! I’d originally made a single-acting cylinder, hoping to use elastic bands to close the flipper, but I couldn’t get this to work reliably, so I pivoted to a double-acting cylinder design that both opens and closes the flipper.
With the gas cylinder sorted, it was time to think about compressed air storage, and I would need A LOT. The downside of that large cylinder area and going for double-acting is that each flip would cost about 160ml of air. I spent forever trying to find some way of fitting a bottle inside the chassis without making the whole thing too big to ever make weight. Then another moment of inspiration. Bottles are light. So light that I could have more than one, and put them on the outside of the robot, using redundancy instead of armour.
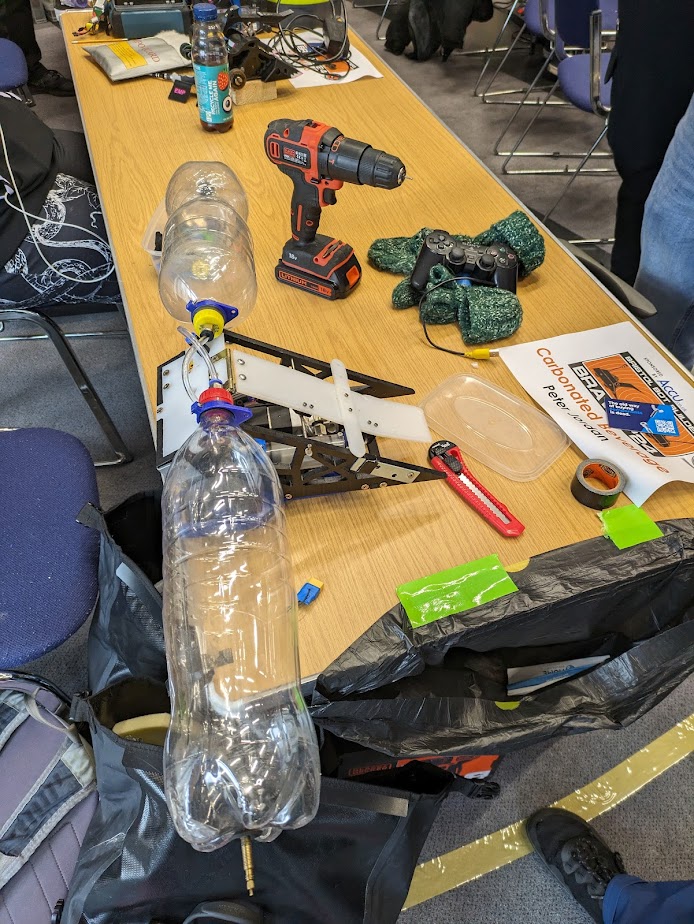
A trip to the local bike shop furnished me with as many dead inner-tubes as I could carry. From these I salvaged the valves, which I fitted to the bases of some pop bottles liberated from the recycling and voila, I had my air storage.
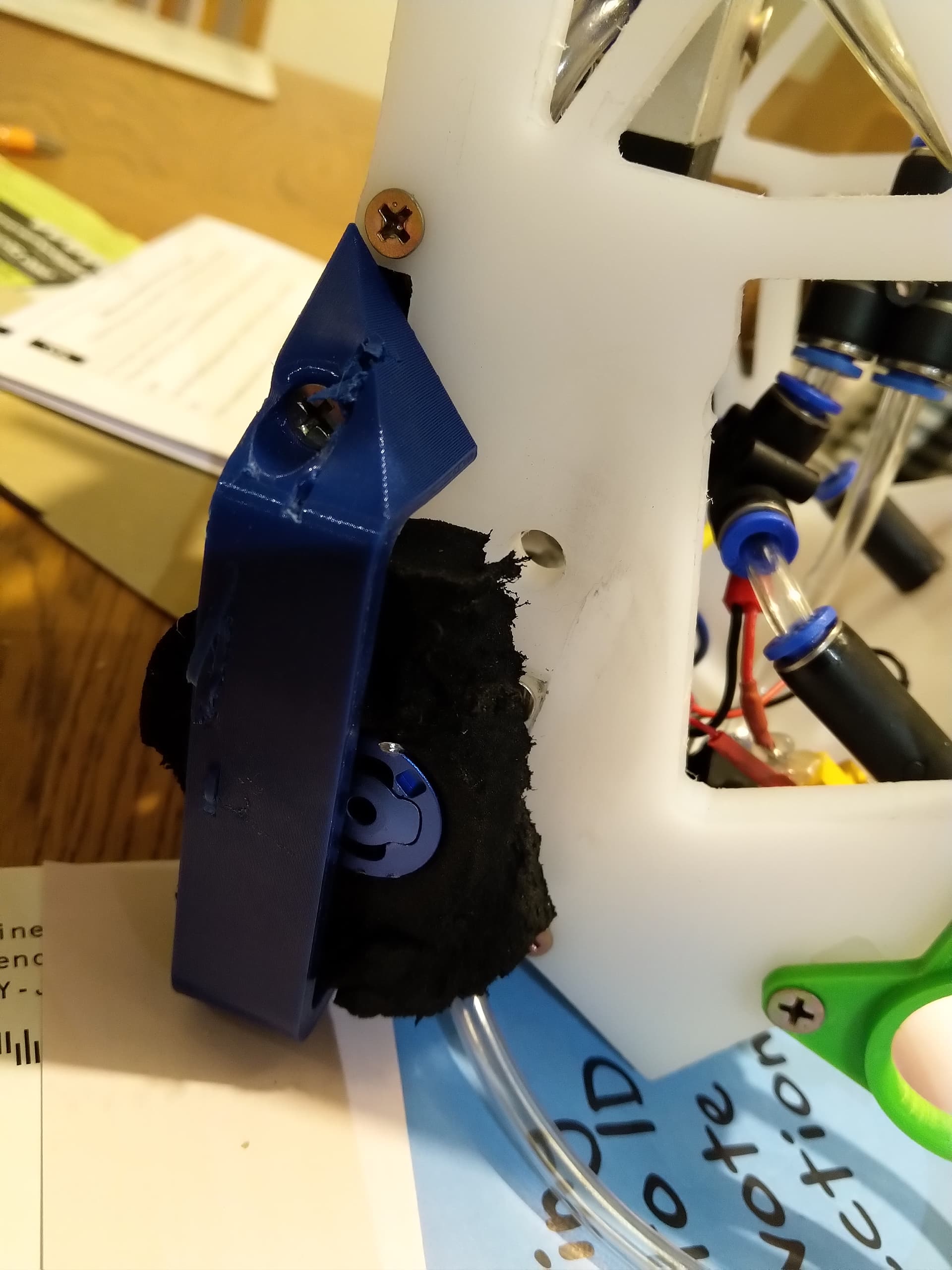
The final pneumatic component was a 3/2 solenoid valve to control the gas cylinder. Surprisingly this only cost £10 on Amazon, bringing the total cost of my super-buget pneumatics system to maybe £40, including failed experiments.
Electonics wise, I used a pair of BBB 22mm motors with some terrible (but cheap) brushed speed controllers. The solenoid valve was controlled through another brushed ESC, which I just used as a switch. The ‘brain’ was an ESP8266 (Wemos D1 Mini) which talked over WiFi to another ESP8266 inside a hacked PS2 controller. This works really nicely but boy was it a faff to set up. Fortunately I’d already done the hard work for an antweight project, so I just had to tweak the code slightly.
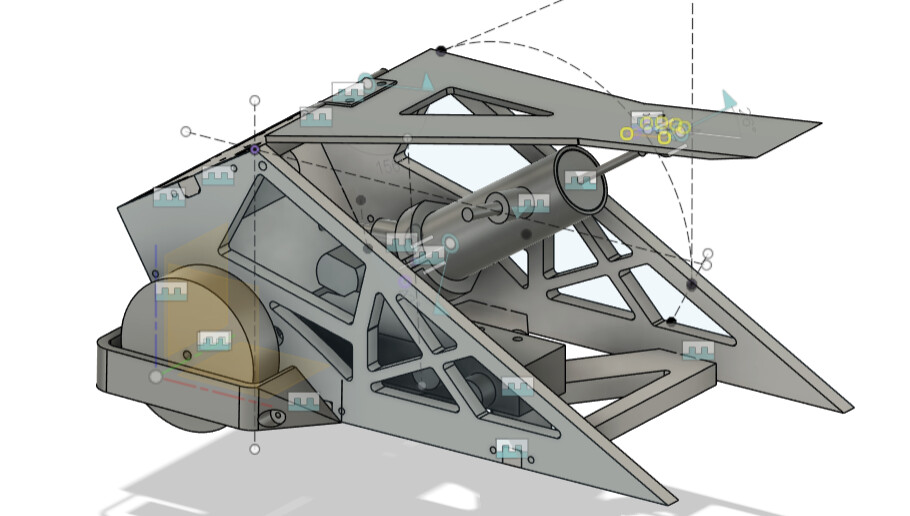
Finally, the chassis. Since I was optimising for yeet I wanted the maximum possible flipper arc to try to transfer the force from the gas cylinder over the biggest possible distance. This meant designing a very long wedge.
Being aware that this was getting large, I tried to make the bot as narrow as possible to keep the weight down. The result was this monstrosity.
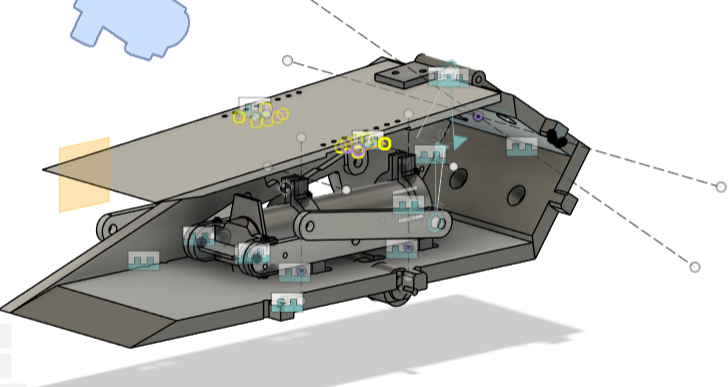
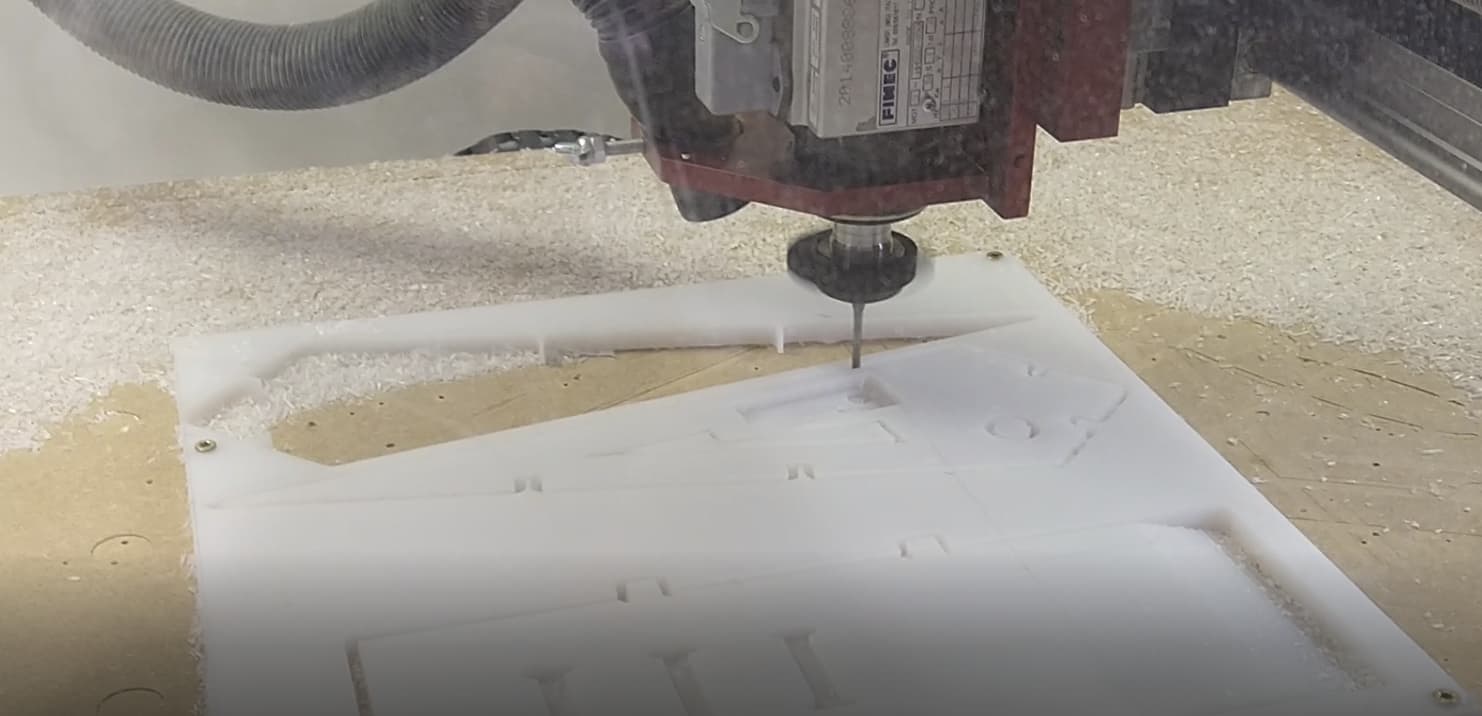
Several hours of CAD later, I ordered some 10mm HDPE and booked a CNC induction at Exeter Fablab.
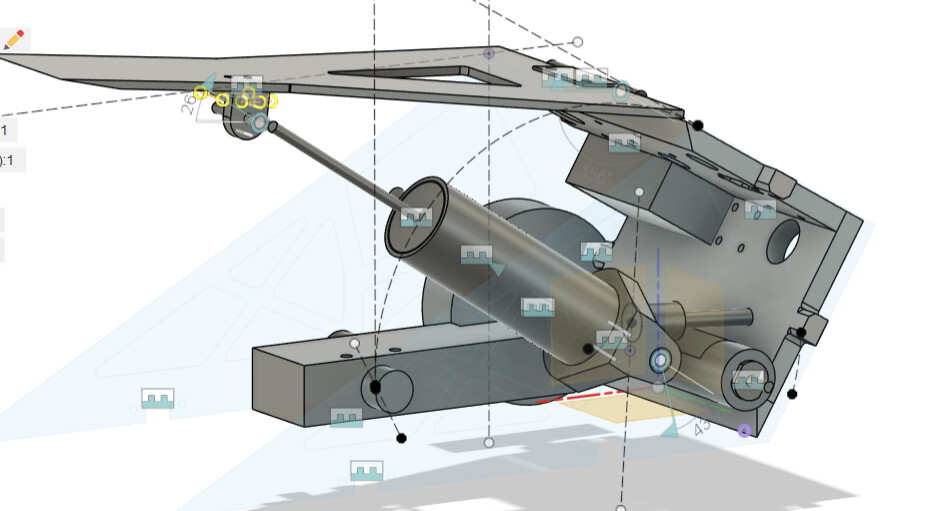
After much overthinking, and several pages of questionable trigonometry, I decided to go with a straightforward pivot-linkage between the cylinder and the flipper.
Time for a test-flip!

And there I was, I had a robot that could drive, flip and, to my delight and relief, self-right. Just a few tweaks and I would be ready to roll…
The night before the competition was spent testing and weighing. This revealed two problems:
- The pneumatics leaked.
- It turned out that my rough-and-ready weight calculations had been made when I was still planning on a using single-acting cylinder, and the 3/2 valve for the double acting one weighed over 100g more. This added to the fact that I’d been a bit optimistic about how much certain other components would weigh and I was way over the 1.5kg limit.
The pneumatic leaks were just a matter of covering everything in PTFE tape and ramming the pneumatic tubes into the push-to-fit valves like I was trying to shove them through solid steel. With those sorted, I took the biggest drill bit I could find and got to work adding >80 go-faster holes in the chassis. By 8pm my drill was smelling pretty toasty, but I was done.
…and then it occured to me to weigh the bottels after pressurising them. I turns out that 4 litres of air at 50psi weighs 20g. At this point I’d run out of space in the 10mm chassis for any more holes, but the 5mm flipper was still intact. Another 20 holes and I was done.

I was finally ready. I packed a bike pump and a sack full of spare bottles and headed for Bristol.