Back to the 'Burgh
Building 95% of a robot in three weeks was a stressful task. Building 5% of a robot in two months was far easier! I began by cutting weight, truncating the plough, switching to titanium shoulder bolts, and having a 4mm version of Sion’s drisk design cut. The battery went from a 4S 660MaH to a 550MaH, bringing the machine to 1500g.
The Barber Surgeon 2 in the 'Burgh 3 photobooth.
There were other changes too. After chatting to Alex about square nuts, I gave the pinion gear some actual mounting. Team They/Them Mayhem were good enough to print me some in nylon, while the large gear was swapped to TPU. Most significantly, the O-Rings were abandoned in favour of a full 3M HTD setup. I realised it would be far easier to mount this pulley to the motor can, so the weapon motor was spun 180 degrees, creating a lot of empty space in the chassis.
I was able to test the finished bot in my ant arena, and while self righting on that 1806 drive motor wasn’t likely to be on the cards, the weapon worked well, and it still drove and strafed as smoothly as version one.

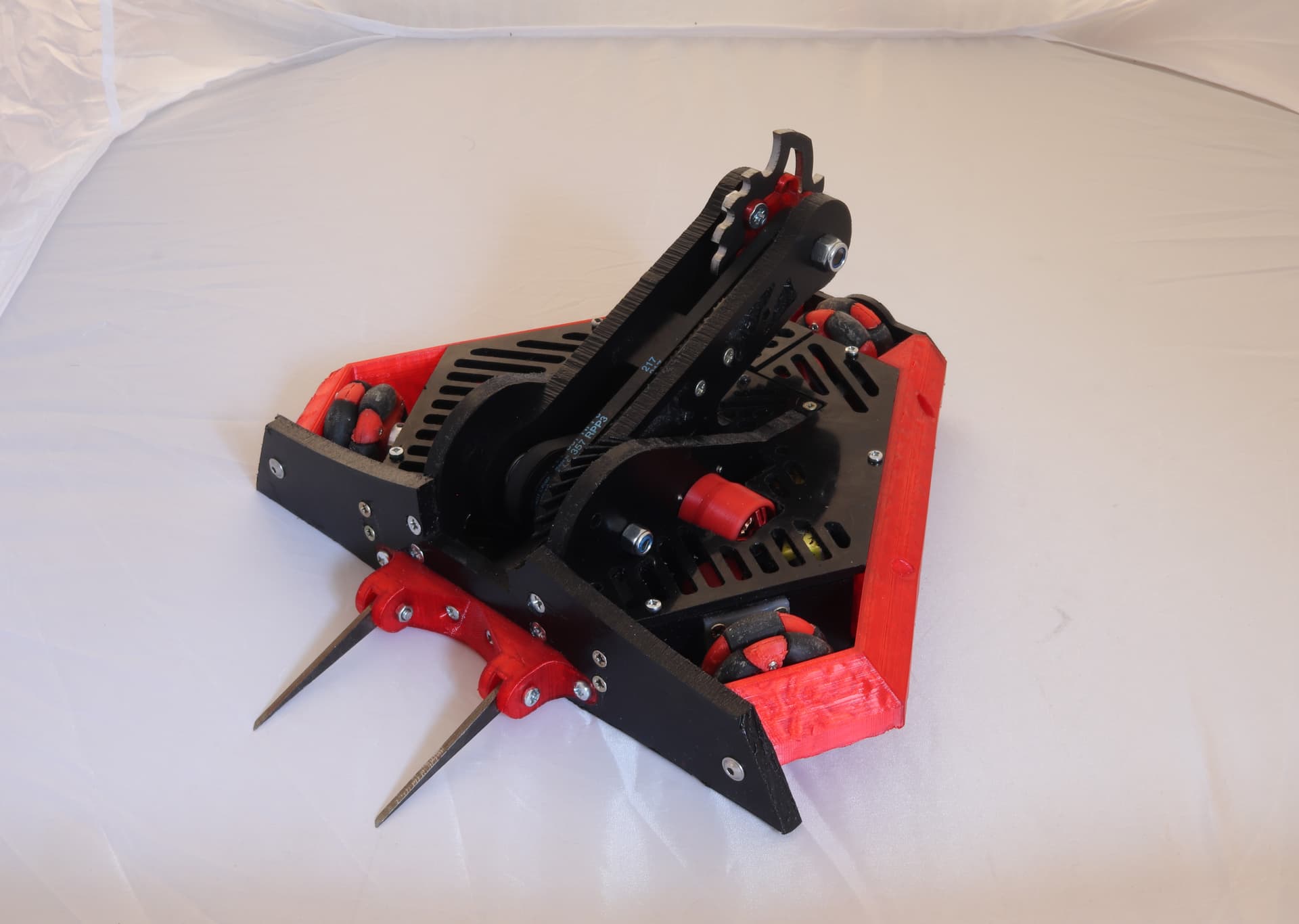
A glimpse inside. Credit - Liam Bryant.
My main competition fights were against Brassed Off, Crab Crab, and Zephyrus. Usually a very exciting lineup! But not really worth discussing in any great detail, since I had repeated issues with the hammer arm. I’d only received the nylon prints on the day of the event, as PLA+ and TPU had proved unsuitable. I was overtightening the grub screw, causing the nylon to deform, and the square nut to be pushed off of the d-shaft , though it took a little while, and a lot of threadlocker to realise and fix the issue. Unable to fire my weapon, I went 0-3, however, I was able to solve the issue by the end of the event. Just before the arena packdown, after the stream had ended, I went in for a match against Jeremy’s Downward Spiral, itself worse for wear, without it’s signature drill, operating as a pure grabber.
In a match no-one saw, Surgeon began to work. Admittedly, a wheel did get pinned, so the drive wasn’t perfect throughout, and Downward Spiral couldn’t do a lot to me, but after the pent up tension of a year of bad events, broken robots and unfinished projects, this fight is still very precious to me. Video below. Alex Mordue’s little ‘It’s working!’ comment in the background just makes the whole damn thing.

The Barber Surgeon 2 vs Downward Spiral - ‘It’s working!’
I can only thank Jeremy for agreeing to the match so late in the day, and Dave for being kind enough to hold up packdown to let me fight one more time.

Downward Spiral damage cam - including sniped wires and some gashes in the aluminium servo casing.
What was very clear, however, was that Barber needed a redo. A redux, even. A more powerful arm motor, and a drastically reduced footprint, thicker forks - designed for the robot - and a myriad of other tweaks to reach it’s full potential. Satisfied with my progress, Barber 2 went on the shelf, and Barber 3 - The Barber Surg3on - entered the design phase. It would essentially be the same design, just refined, and would first compete at Sceetles in March of the following year.