Conception The Chilli Daddy was born and took the shape he did for a few reasons:
First and foremost is my upcoming trip to NHRL, no way was I throwing my baby Luchador into that KE hot mess - with no pit and no OOTA, I knew I wanted something with a bit of KO potential to take (likely a spinner of some variation).
I wanted to make something vaguely viable/competitive but to have my own unique twist on things
If possible I wanted to build a robot that was as difficult as possible to hard counter via changing set ups.
Im generally a control bot driver, so while I wanted to ensure I had reasonable KO potential - I knew I also wanted something with a strong focus on solid drive and that could hold it’s own even if/when the weapon goes down.
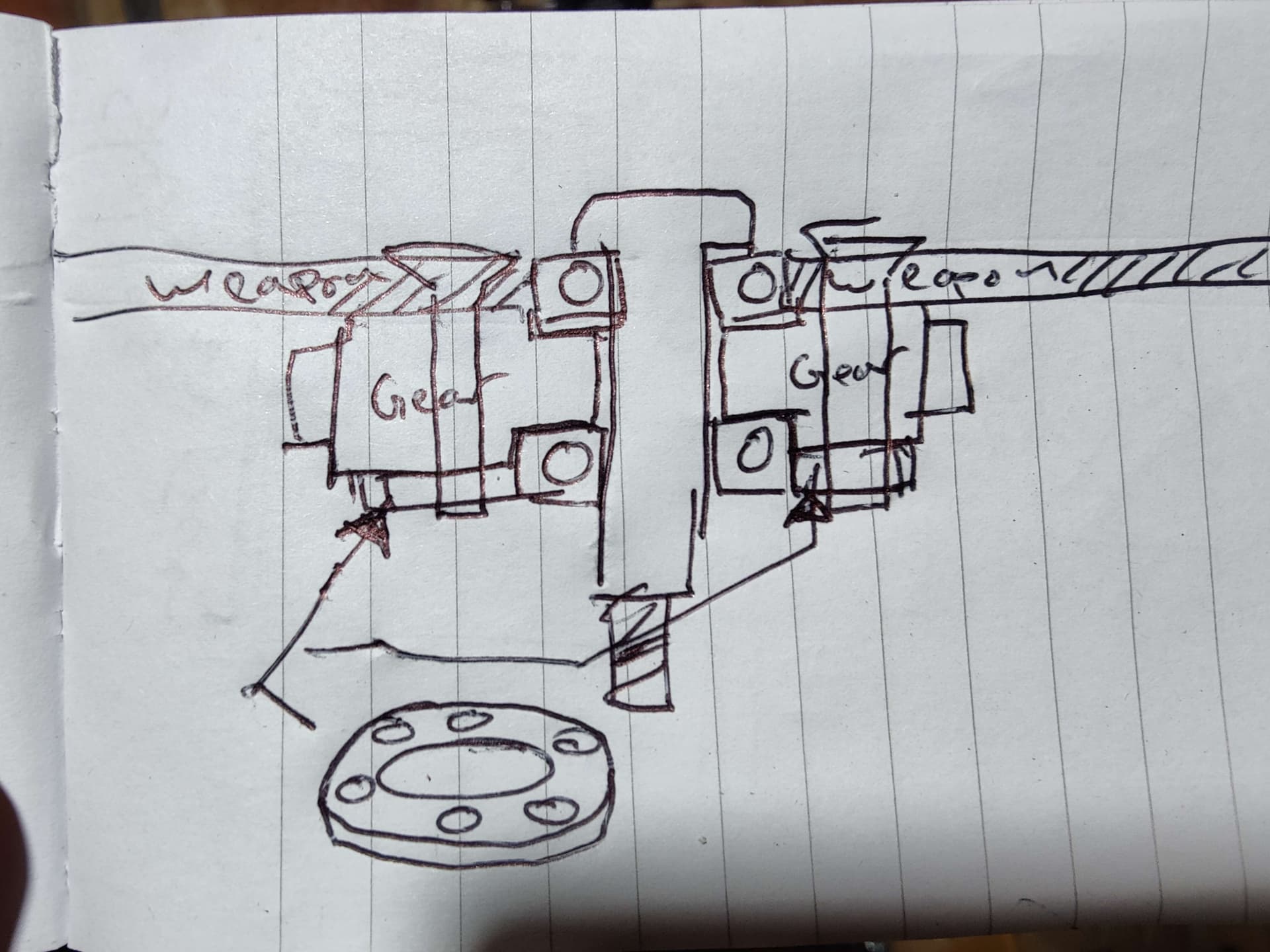
After a bunch of iteration and abandoned ideas I finally settled trying to do a horizontal with a forked front and a butt spinner. The idea being to get under my opponent and then pivot/twist to hit them in awkward spots - not with a long thwacky tail like thagomiser, but more akin to Rotator vibes.
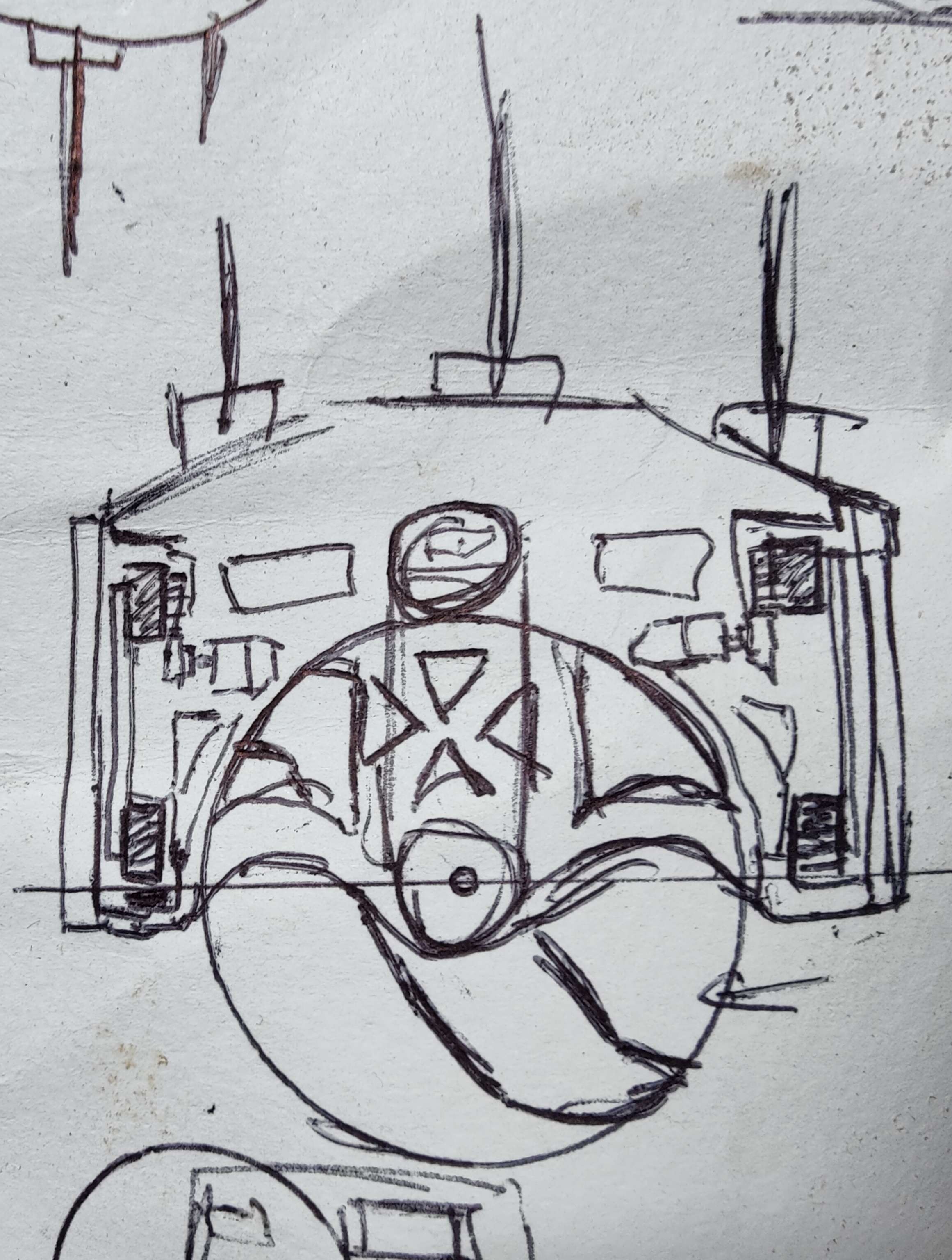
Most my robots start out like this at some point, a dodgy drawing on a random scrap of paper. Once in CAD though the realities of the actual scale (and weight) of things often see them change substantially - and in this process that sketch turned into:
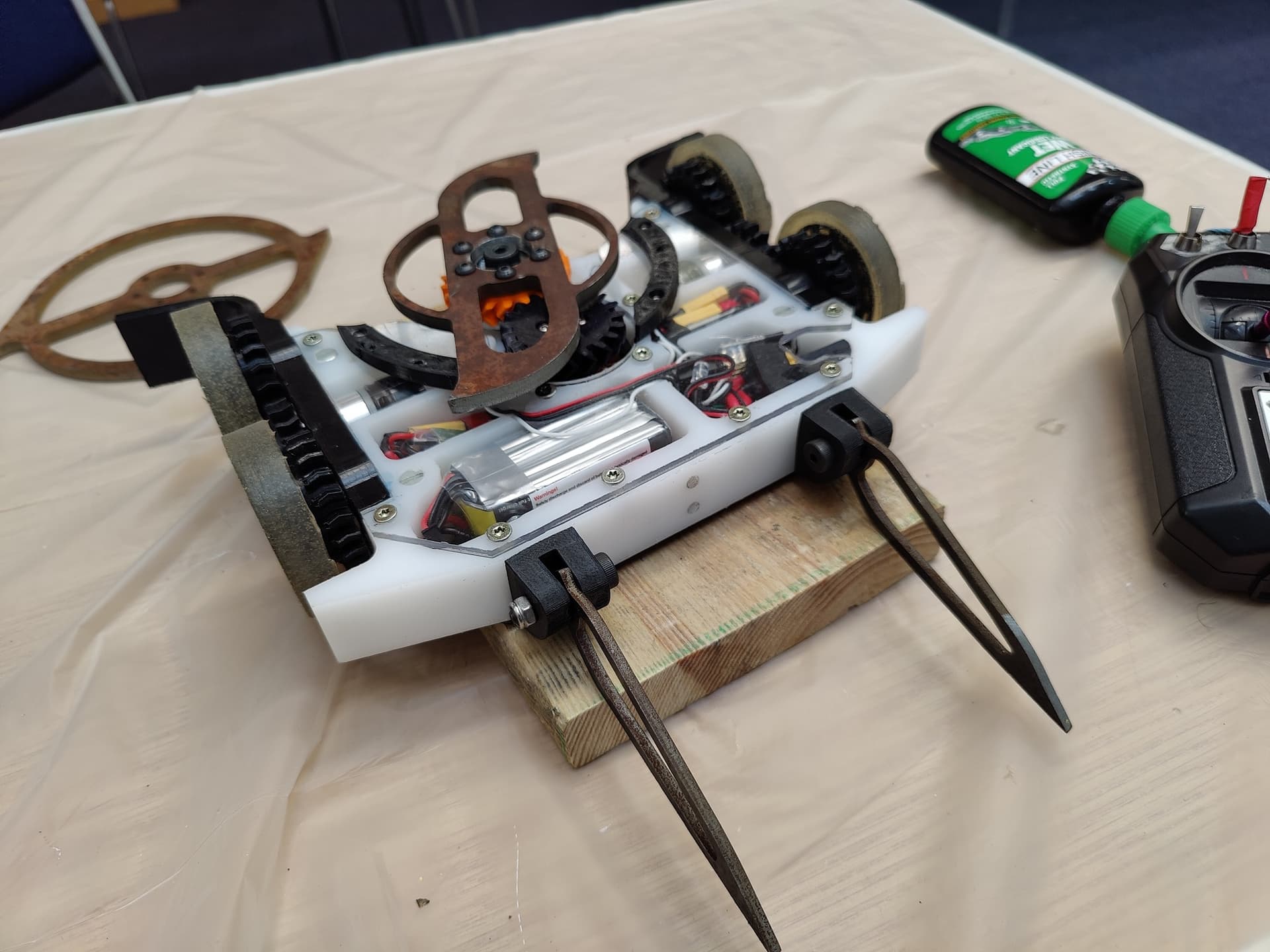
This first version of The Chilli Daddy. veered away from the initial sketch in a couple of ways. It became a cantilever design rather than a mid-cutter - I realised with my idea of getting under people prior to hitting them - that this would ensure more consistent hitting ability.
And the weapon and drive became gear driven rather than belt driven - couple of reasons for this. Firstly the most common teething issue I see for spinners is belt related so this side steps that. Secondly not many people seem to do it here in the UK on weapons at least(which is always a great reason to try things imho). And finally I really like gears - look how many I have on this robot !
I have tons more I could say, but I need to get on with work. But will update further details as I go
For my drive I’m running one 1806 diy rotalink conversion on each side. To the output I’m attaching a pololu mounting hub and bolting a printed gear to that.
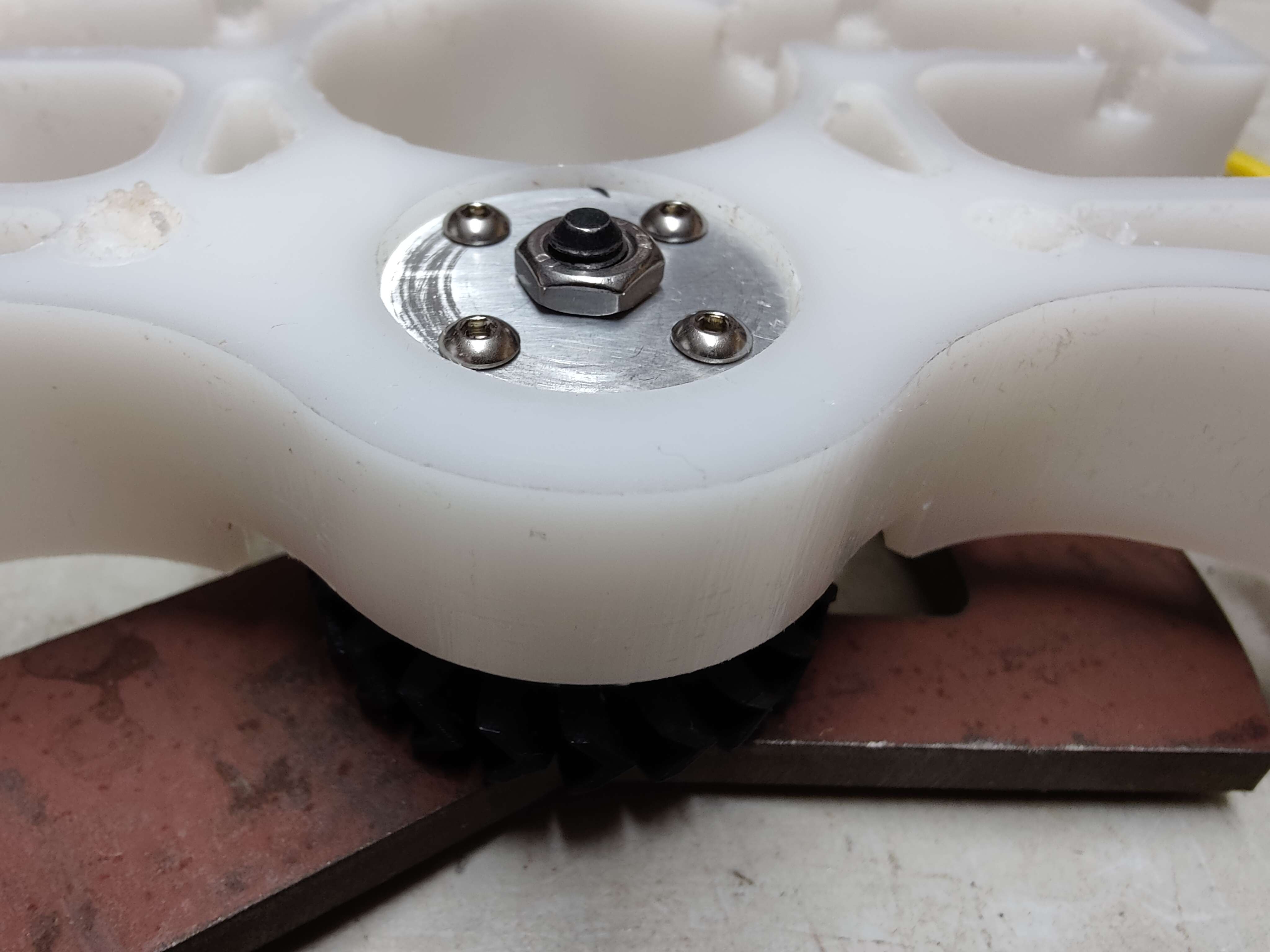
Each wheel is a TPU printed hub with integrated double helical gears and cast PU tires running on oilite bushings on shoulder bolts.
Vers1. That ran at brawl had the shoulder bolts threading into inserts in the drive bulkheads.
Ver1.1 which I’m currently working on has these inserts relocated into the billet chassis, with longer shoulder bolts running through the drive bulkheads to reach them. This extra support of the axles combined with the inserts now being fully encapsulated - should result in much more robust drive
The Chilli Daddy uses a 6mm hardox weapon with an effective diameter of 165mm. Ive got a few options cut that range in mass from 220g to around 290g.
However to get into the US weight limit of 3lbs/1360g requires running the lightest of these, so the others will have to be reserved for UK outings post NHRL.
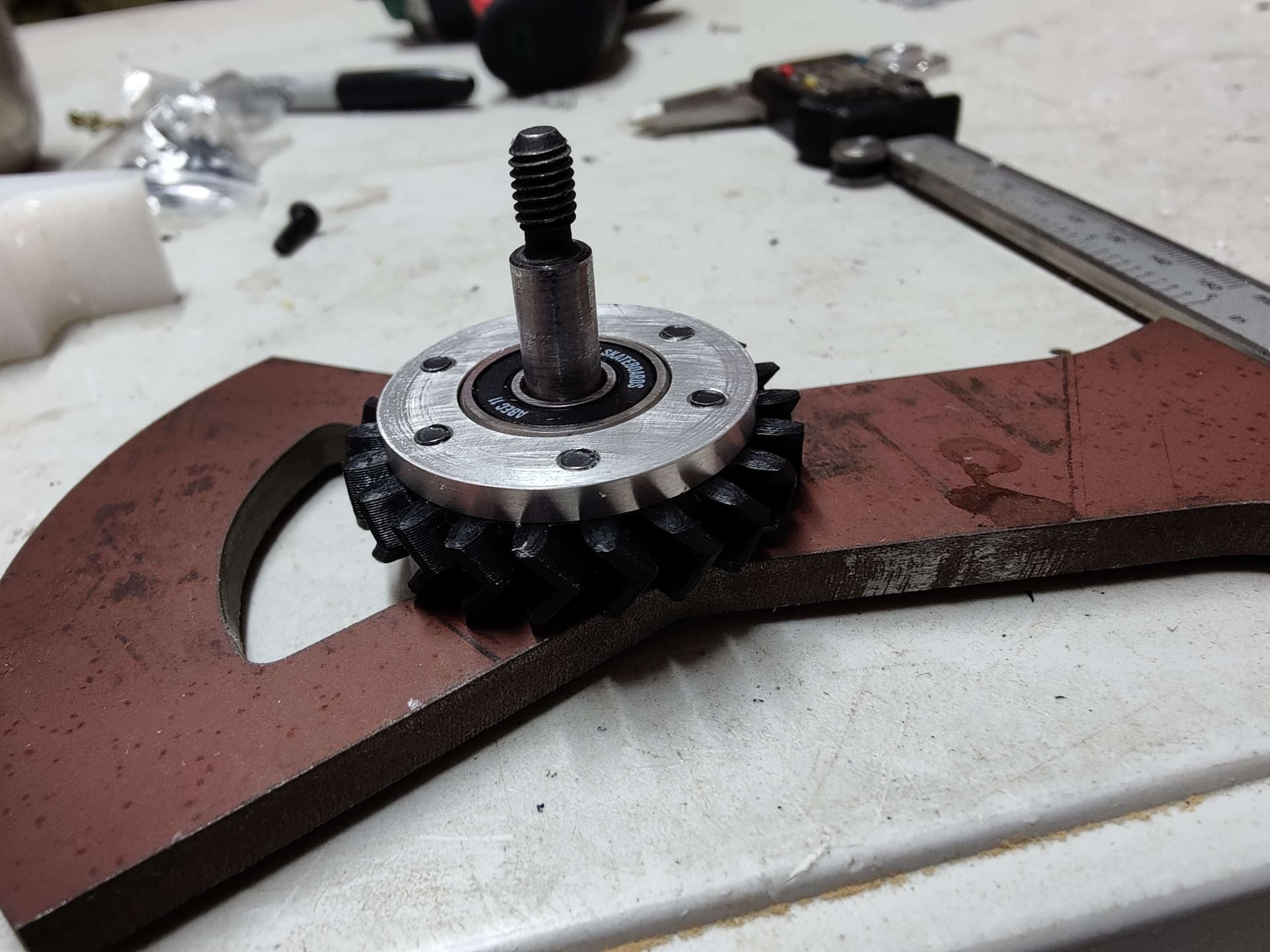
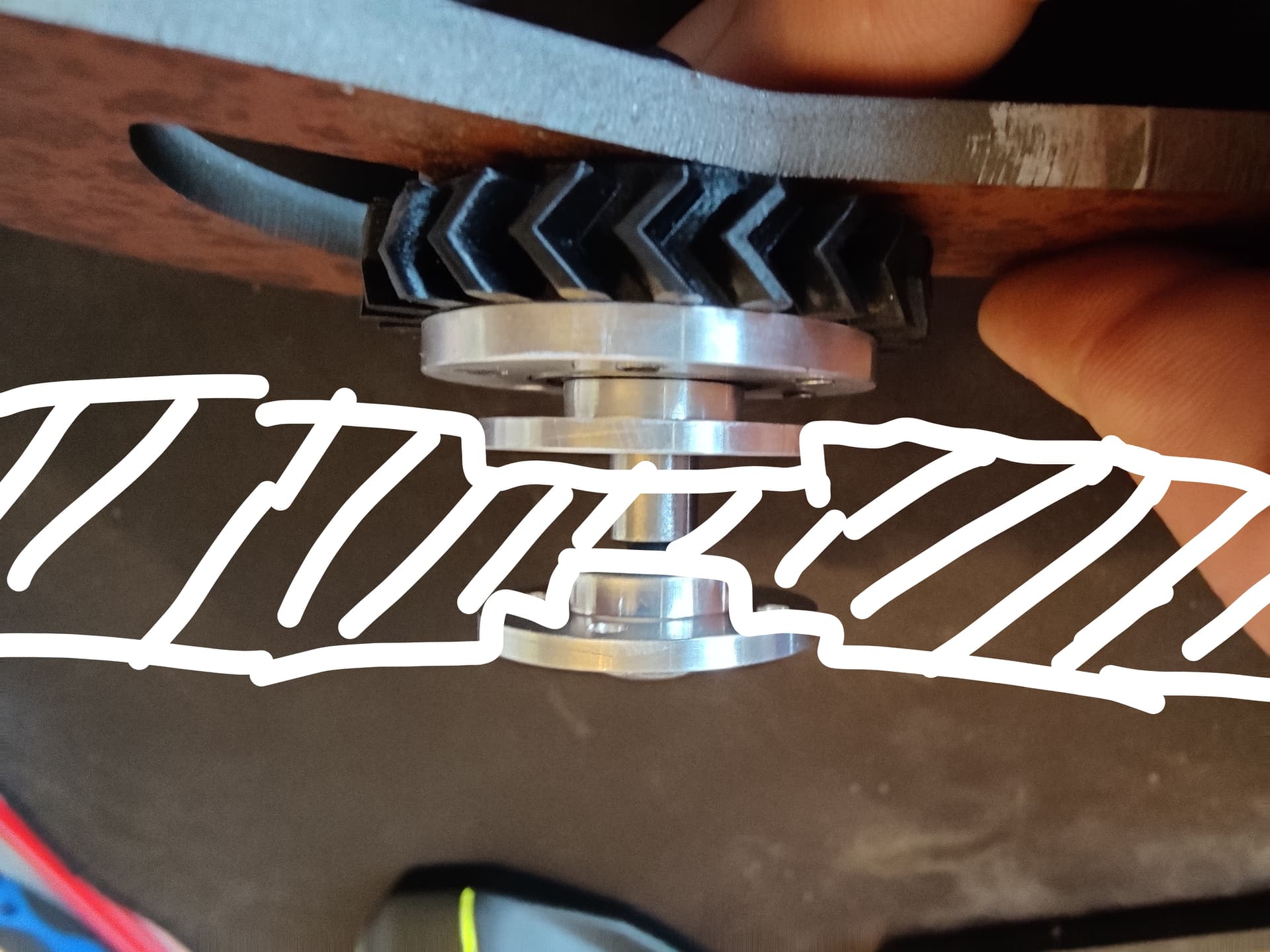
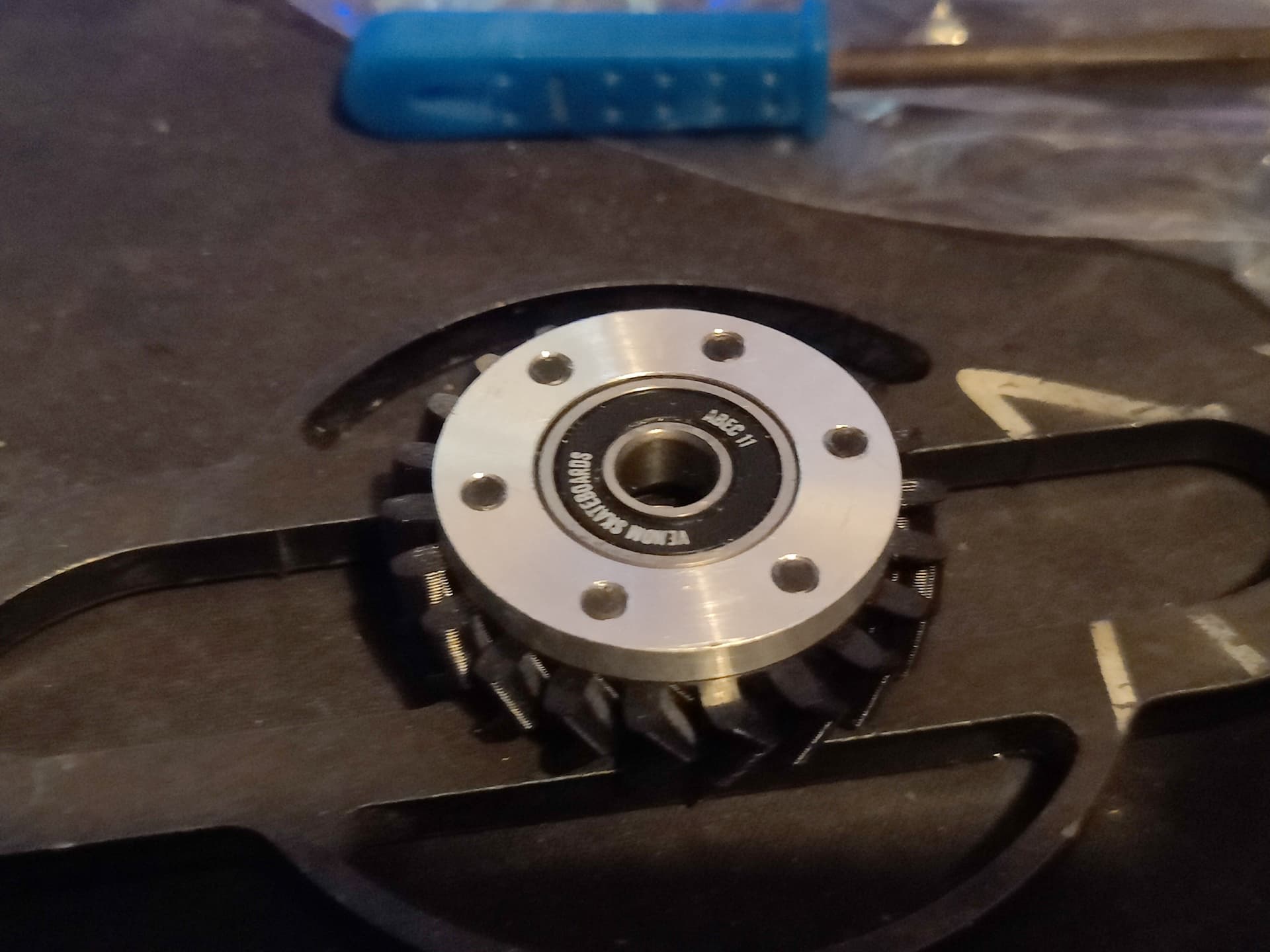
The weapon bolts through a printed double helical gear gear with six m4 bolts that then thread into an aluminum locking. It spins on the 8mm shoulder bolt shaft on two sets of skateboard bearings. The upper set sit snugly within the weapon it’s self while the lower set are recessed tightly into the lockring and gear.
I decided I didn’t want to risk simply running the shaft straight through the hdpe chassis. Concerned that the impacts might easily deform the soft HDPE on big hits. To reinforce it I’ve added aluminium top hat shaped inserts to each side. These then bolt together through the chassis with four m3 bolts. The m6/8mm shoulder bolt threads through the lower insert and finally a nut is added to lock the whole assembly.
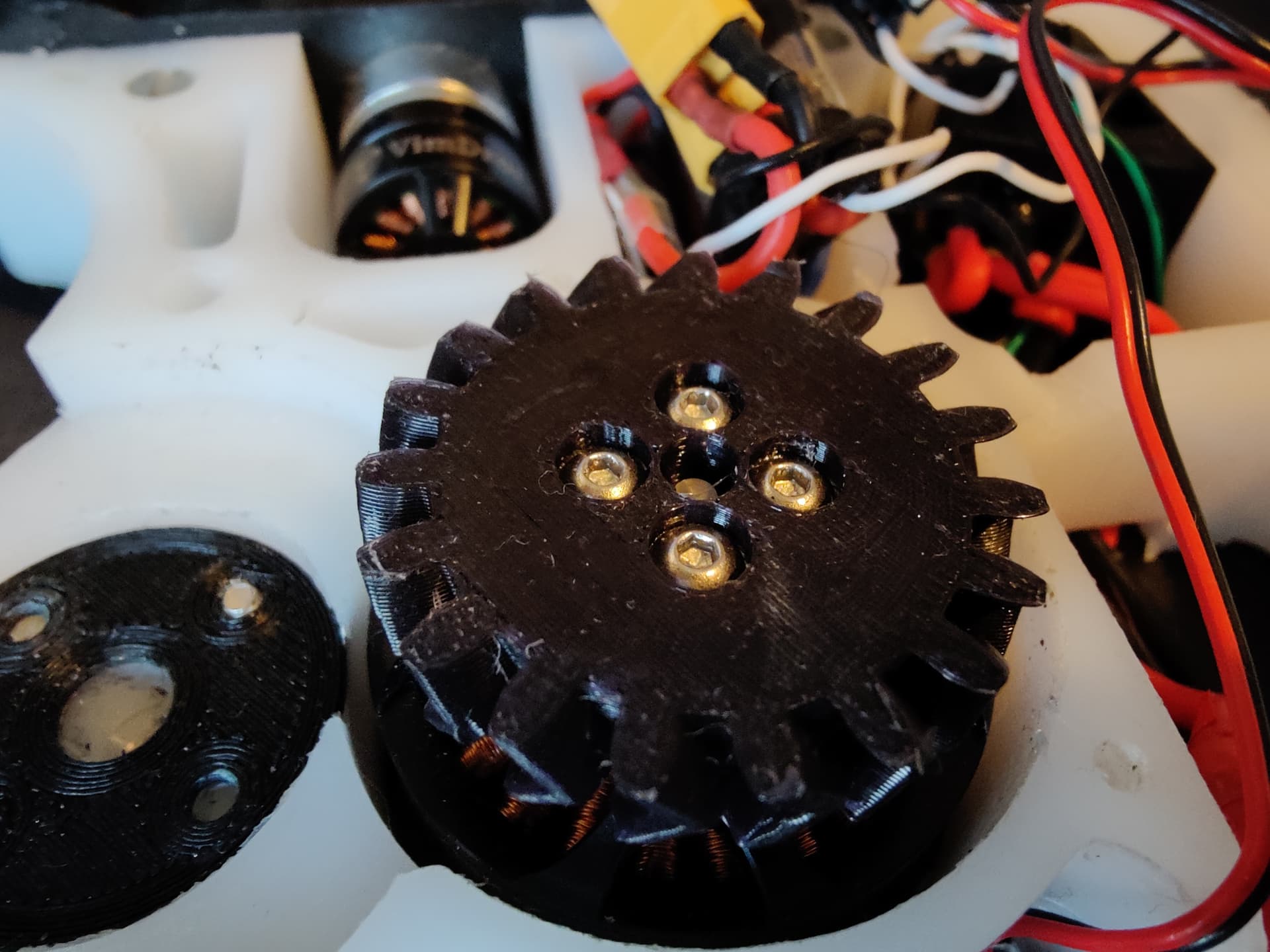
The weapon is then powered by a 4108 which has a double helical bolted to the top that drives the whole thing with a small amount of reduction for a tip speed of around 190mph (theoretical).
The gears I ran at brawl show no signs of wear after my two whiteboard fights, which was a big relief as that was certainly one of the bigger question marks going into this design. I didn’t experience any real weapon on weapon hits, so we’ll see how they fair with those kinda forces in the long run…
They’re fairly chunky - nearly 10mm thick with 2mm mod and double helical with a fairly extreme helix angle (which as I’m sure you know - puts more material across each tooth in the direction of load than a spur and spreads loads across multiple teeth). If I was starting again I’d probably consider going up further on the mod size for peace of mind - but not an easy thing to change at this point
They were printed in taulman bridge nylon for the motor gear and overture pa12 nylon for the weapon gear.
I do expect these to be fairly consumable however and do have spares.
Prior to brawl, I did attempt a test spin with some pla-st prototypes, which went comically badly resulting in very melty gears
So The Chilly Daddy. had another shakedown run at Chichester recently. It was a mixed bag for the bot.
On the one hand it really demonstrated that the principle of the build works and also proved the reliability of the weapon with it surviving multiple weapon on weapon hits against inferno.
However it did also highlight some issues I had not foreseen.
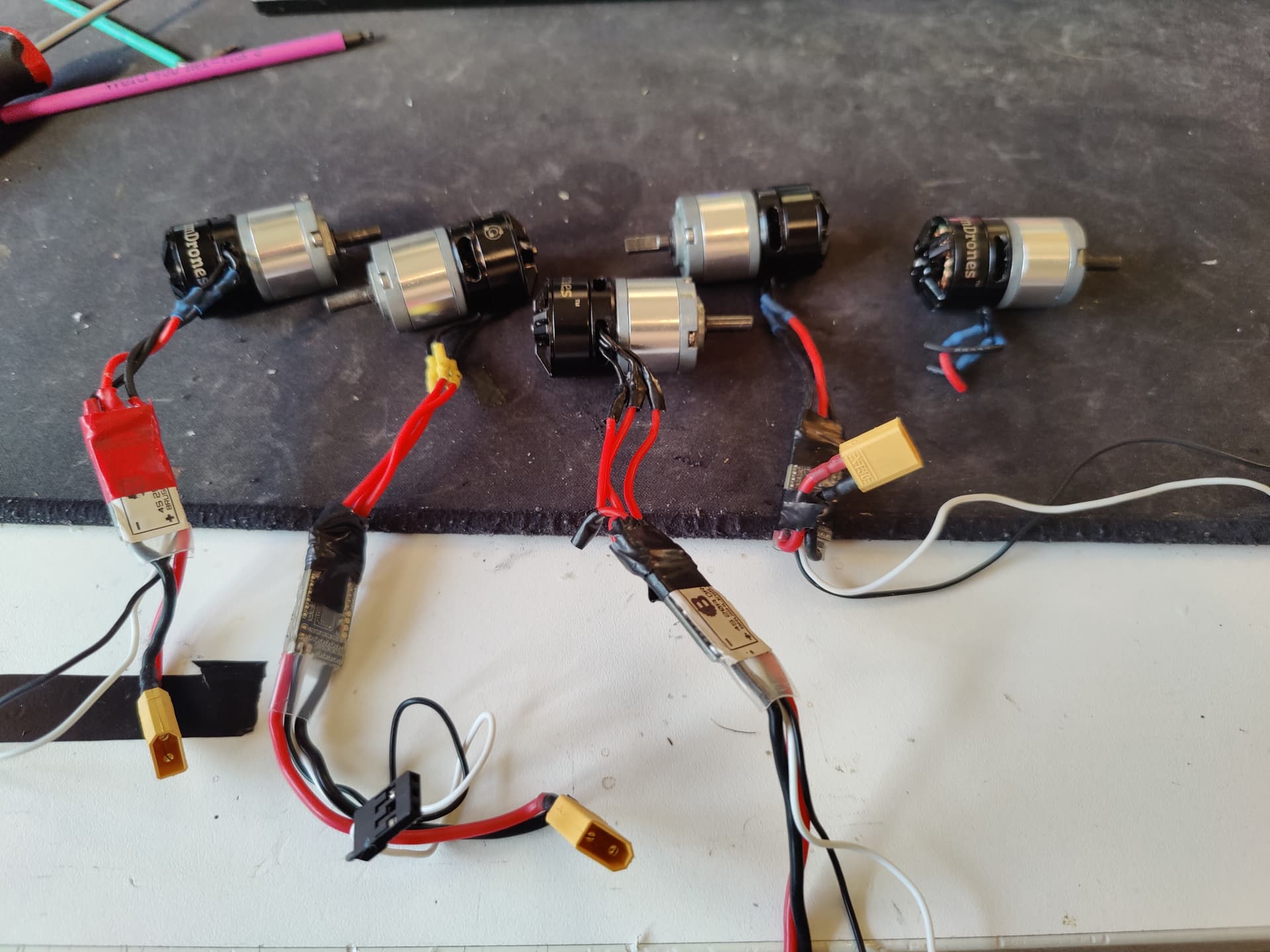
In three out of my five fights my diy brushless rotalinks failed in the same manner. The cans backed off the motors causing the pinions to disengage from the gearbox.
This isn’t a failure I’ve encountered before and I’m assuming it’s happening now due to the strong lateral forces of hitting with a horizontal.
After a bit of advice from the builder of Billy I decided to add some brass spacers between the pinions and the brushless motor to lock the whole assembly together.
I cut these from brass tube using a ghetto pseudo lathe matching the lengths to each motor
Because I made these doing a full shaft swap I didn’t want to pull the shaft or pinion for fear of introducing slip on either part so instead slitted them length ways and pushed them onto the shafts and crimped them down.
So since my last post The Chilli Daddy. has been to NHRL back in June and Rapture the following weekend.
Nhrl was a wild ride and The Chilli Daddy proved to be mega reliable, not once getting KOd and making it to the top 8 out of a field of 160! It did however loose the weapon in both its final two fights against Sea Dragon Roars (possibly my favourite fight I’ve ever had) and Jet lag.
At rapture TCD performed reasonably well, but lost its weapon again against gizmo.
It turns out that big weapon on weapon hits against powerful verts had enough upwards force to make the flange in my nylon weapon gears tear through!
So naturally this is where my attention has been focused recently and I’ve redesigned my weapon stack.
The nylon gear is no longer structural and instead just keys around a stack of 2d metal profiles. Aluminium spacers to hold the bearings and the middle retaining flange now being 3mm hardox.
So I’ve been prepping The Chilli Daddy. for Brawl - its a lowly reserve but being local I’ll attend regardless and get a cheeky white board to test the latest tweaks.
The robot is largely solid and my previous weapon stack amends should have fixed the bar flying off against nasty verts
So whats left to improve? - just small tweaks really.
The TPU Fork mounts have a tendency to pull through off their mounting bolts on impacts
the long boi forks while effective on the charge, are cumbersome and get in the way in tighter close up manoeuvres
I lost a link against Gizmo at rapture so some sort of link retention/door is a must
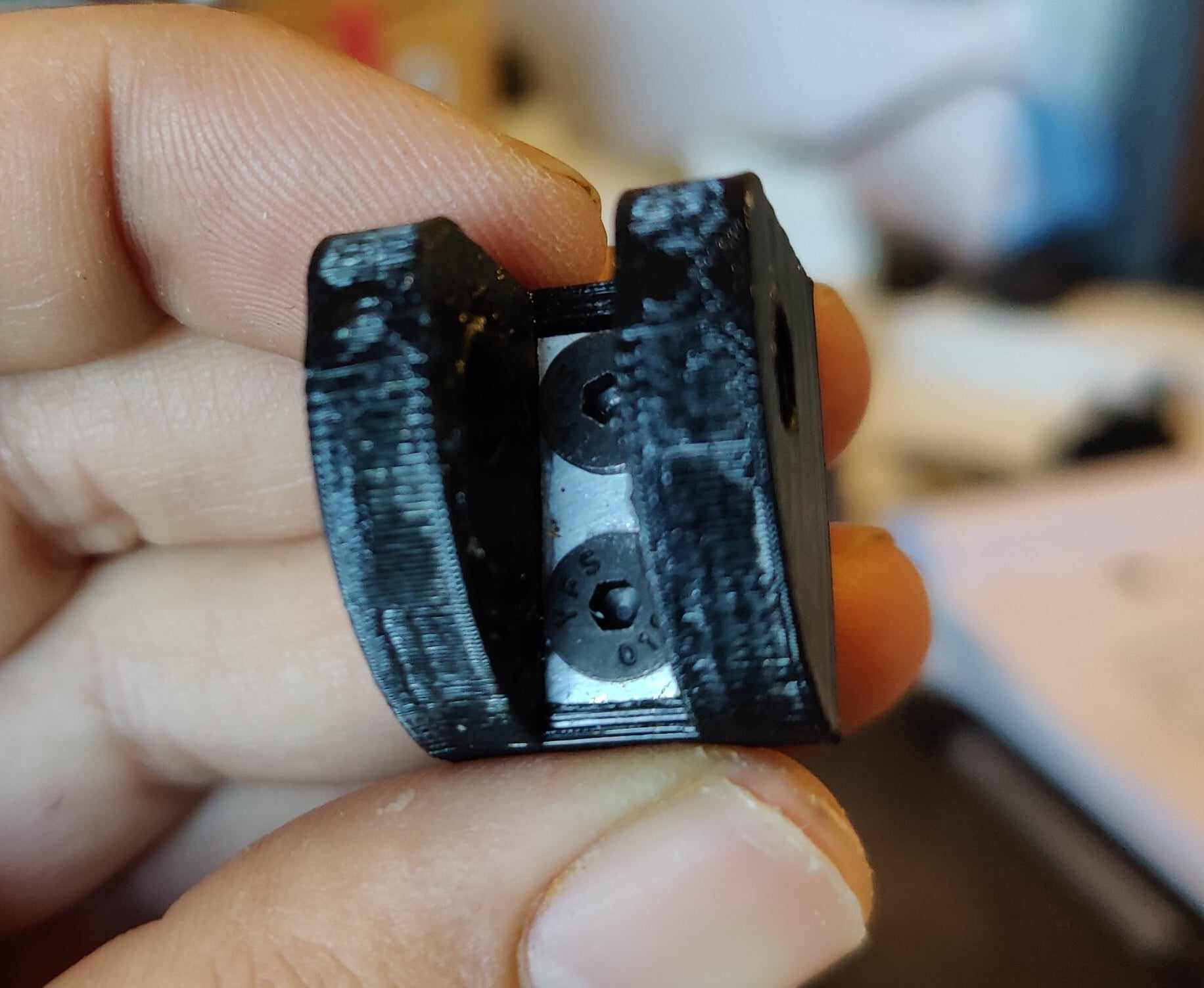
So I’ve updated my TPU fork mounts to now sandwich the TPU between the chassis and a Ali plate that runs between the mounting bolts to try and prevent the tpu pulling through:
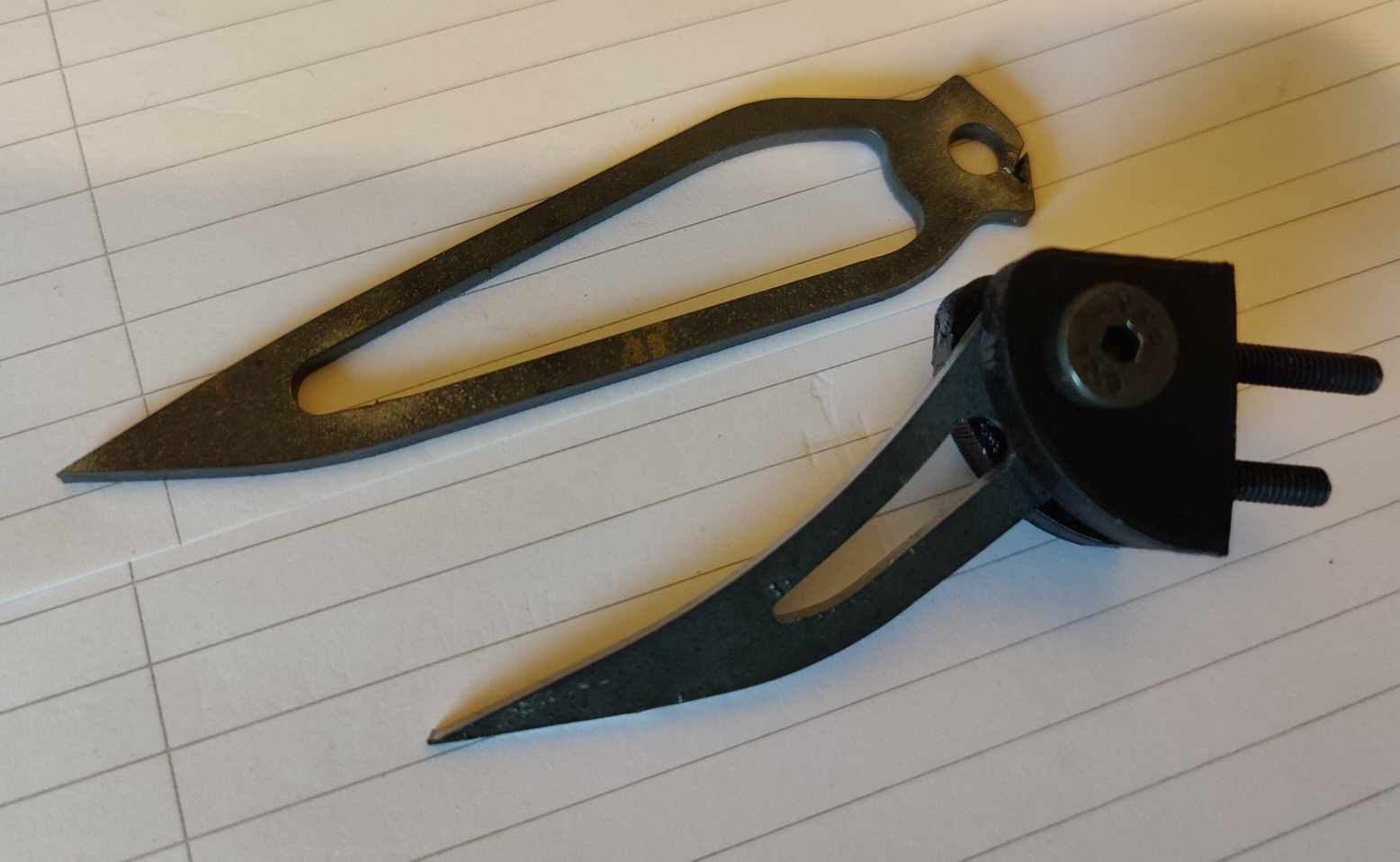
For the forks I now have a shorter more aggressive option that are tailored specifically to the overhead weapon orientation (the long boi forks are usable when the bot is either way up). Old vs new comparison:
For the link after discussions with EOs and David I’ve dropped the double link set up I ran previously and am now running a single link with a TPU link door. This door features chamfered flanges that extend under the lid and regular flanges that extend over the top of the lid for retention. There is a channel in it to allow the link’s ziptie to protrude and with the whole thing being TPU - a good yank of this will make the whole door fold out the way.
So a bunch of smaller tweaks - nothing huge changing on The Daddy - I’m largely very happy with most aspects of how it performs and hope these small changes will improve the few small issues I have with it
This robot is so battered having been to both NHRL and Rapture - I’d usually be doing a full rebuild at this stage -so I think it is a testament to how robust it is - that I simply dont see the need!
Lovely you’ve got to the point of housekeeping basically on this guy. Do you think you’re just going to run this chassis/version into the ground and then start a new one? Where do you see TCD going from here?
Hope you get a shot at the main comp because there absolutely needs to be some hardcore horizontals there to carve a chunk out - though if it’s down for whiteboards it means I get to have another crack at it!
Where do I see TCD going from here is a good question - honestly at this point I’m not entirely sure.
So much of the current build is essentially bullet proof.
Honestly the drive and construction is about as good as I could hope for.
The weapon is super reliable - when it doesnt come flying off that is! but hopefully the new stack will have sorted that fault out - but might just end up highlighting new weak points potentially.
I’ve given up on the heat bent wheel guards - TCD just has a tendency to self destruct those as they extend too far and I just hit opponents into them - but they were always intended to be semi ablative anyway (they’re the 10mm hdpe drive bulkheads pocketed down to 5mm and heat bent outwards). Will probably just round off the bulkhead where it protrudes so they extend further than the wheel’s gear but not as far as the tires
So I’m mostly at a point of fixing issues as/when the arena highlights them to me largely.
The only underlying thing I’d like to fix but haven’t so far (because it means pretty much entirely new chassis) is that the weight distribution is a little off - heavy towards the fork end. This makes the bot handle not as nicely in undercutter mode as it does in overhead mode but is still very mobile - just need to be a bit more gingerly on the sticks.
When the two entire chassis I have are completely shagged I’ll probably look to adjusting that - either shifting the weapon outwards 5-10mm or possibly shifting the drive towards the forks a similar amount? - not sure.
Recent ant drum experiments does have me wondering about making one of my 4108s into a hub motor - but honestly the gears have been pretty great so far and I don’t like changing what works as a rule these days.
Its been a funny time for me beetles wise - I’ve been iterating pretty hard since starting the hobby 3 years ago - usually doing sweeping changes at least every 2 events or so. Now I’m gotten to a point of only needing minor tweaks and running things largely the same on both Luchador and TCD - it is a very new experience for me.
I decided to go to the Chichester event with a bunch of the other Bristol lads. Being in Antsee’s hobby arena it was gonna be bigger than the usual 2*2m we usually do beetles in and I know from my trip to nhrl that TCD loves a bigger space to operate in, so rebuilding TCD seemed like the obvious choice. So did just that!
Being largely happy with how TCD works this wasn’t a huge redesign - mostly just doubling down on the idea of wheels as armour and improving the front end set up and using some of the extra weight we have to play with thanks to the 1.5kg limit (rather than being USA legal at 3lb).
I designed a set of double wide tubular wheels with a cool low profile racing tire vibe. The intention here have lots of flexible and ablative tire so they can get chewed up but still have continuous tire for driving.
Knowing there were gonna be some hectic horizontals attending (Kult I’m looking at you ) I started playing around with Anti-horizontal set ups. Having had good experiences with Luchador’s TPU pontoon set ups for this - I decided to try something similar and created this absurd triangle config. I didnt end getting to try it out however as I did not draw any HS’.
On the day:
I had some great fights and TCD worked pretty reliably despite loosing power in my first fight against Frenzy - where it managed to take out Frenzy’s weapon and write of their chassis before dying. The rest of my fights were typical TCD affair of being a great driving bot and very reliable - getting under people and getting hits in, but ultimately not actually really killing anything.
Whats next for TCD?
Honestly TCD is in a bit of a weird spot. It can get lucky with how it hits in awkward spots and pull of surprising damage - but really that is incredibly situational.
Generally I’m starting to think that Beetles are so robust these days that I’m not sure if the idea of a control bot with a spinner is really viable. To get it to have any realistic KO potential would likely mean investing more weight into the weapon and taking some away from the drive and general tankiness. At that point I think it’d likely just become an upside down Kult - which isnt really what I want to be running.
This iteration of TCD is deffo the best one to date - but never the less I think I’ll likely be shelving it for the time being and going back to my true control bot roots - focusing on Flipador and Luchador
tcd looked mean!, looking forward to fighting it in future if/when it returns. was kind of hoping to draw you with zeph but probably for the best i didn’t
just a thought and not sure how much clearance you have when it runs upside down but have you considered some small vertical teeth on the bar? might help with engagement since your mostly hitting flat to flat with baseplates and wouldn’t require that much more weight on the weapon
Hey Morgan, I have considered some vertical impactors. Clearance isnt huge, but I could tweak that if needed.
The main issue though is fabricating it - feels like a massive challenge/ball ache as really I think the best way would be to have some sort of keying features + weld and then rebalance.
But… 1. I do not weld and 2. that seems like a a ton of work for a consumable part