I’ve been toying with this one for a while, and with both a free evening waiting for parts for Vortex BW and a couple of beetle shell-spinners appearing on the scene I thought this might be of interest to some folks. I’d like to have one repository of Vega info, so here goes. Might be a long one…
2017
The start of the Vega project goes back to 2017, myself and George are expletive deep in the folly of building a heavyweight due to TV comps but we know of the feather scene and it looks pretty sick. We know that the guys the biggest UK event (at the time) run Robot Wars, and we know that it is a way to make a name for yourself. The real catalyst though was the announcement that Robot Wars Series 10 was going to have a concurrent feather comp ran alongside it. Although this was later cancelled (boo), the idea was now in our heads and we were committed to building something.
The original idea wasn’t to build a shell spinner at all, but an overhead bar. That seemed kinda unique, and probably something we could have done fairly cheaply. The drive was to be a pair of drill motors, with a chopped up angle grinder gearbox translating the weapon drive through 90 degrees. The bot was to be called Calamity and we applied for the RoboChallenge Insomnia 2017 event which did go ahead.
We were swiftly rejected.
This is all that I have of this design, I think this is possibly the only public photo of Calamity? There’s ideas here that made it through to Vega though
With Calamity rejected, we put the project on a back burner and focused on Vortex (the heavy). It first ran (to use that word very optimistically) in 2017, however we did make a basic frame for Calamity in case Insomnia 2018 was announced early that year. As it turned out, Insomnia 2018 was a lot later in the year than we (and I think everyone else) expected.
2018
In summer 2018 there was a rumour in the community that Insomnia 63 was going to host a RoboChallenge event. However, if memory serves me rightly it wasn’t officially announced until around July or so, and fairly well into July at that. Over summer George and I had been debating what to design when this comp came around, and how many parts could we use from Calamity in whatever we decided to do. We knew RoboChallenge were looking for unique designs, I think I was the one who suggested a shell spinner? Might have been George. It could use most of the parts of Calamity, but was a bit more out there. When the applications opened we slammed a basic CAD model together in a week or so and submitted it.
The early CAD for Vega, this model is with the shell on. This was done on a uni license of Solidworks so some parts would have been in the original model which are now lost to time/Inventor conversion
The same model with the shell hidden. Note the drill motor drive, single battery and the propdrive now mounted vertically hence eliminating the need for a gearbox. All this was done to simplify the build. The chamfered edges on the chassis rails were a holdover from Calamity, they’re still in the current designs!
The design for Vega was lobbed together using parts we had, parts we knew were common, and parts we could get made. Hence drills were used for drive, the weapon was running off a Propdrive 5060 380kV as everyone else seemed to use those and we knew we’d be able to source spares if we lost ours, and the frame was a mix of waterjet aluminium for the baseplate and hand cut HDPE for the chassis rails. The centre shaft was made by the workshop at Strathclyde Uni on the downlow by the apprentice. We even went so far as to design a version with a flat sided shell in case we couldn’t make a cone on time.
The flat shelled Vega design, we wanted a cone but weren’t sure if it could be done. Thankfully, when we got costs back from a rolling supplier there was no difference in cost for conic or flat shells, so we went for the cone
Vega was to be deliberately stupid, that was always intentional. Hence the shell was made from 4mm Hardox, and weighed 6.5kg. Given the whole robot clocked in at 12.8kg when weighed, the shell made up ~51% of the weight of the machine. I was happy if it could hockey puck around the arena like a pinball.
To give some context on timescales for Insomnia 63 I looked back through our old FB posts from the time. We announced that the bot was accepted on the 1st of August, the shell flat pattern arrived from K-Cut on the 10th and the comp started on the 24th. For a first feather, we’d decided to cut everything very fine…

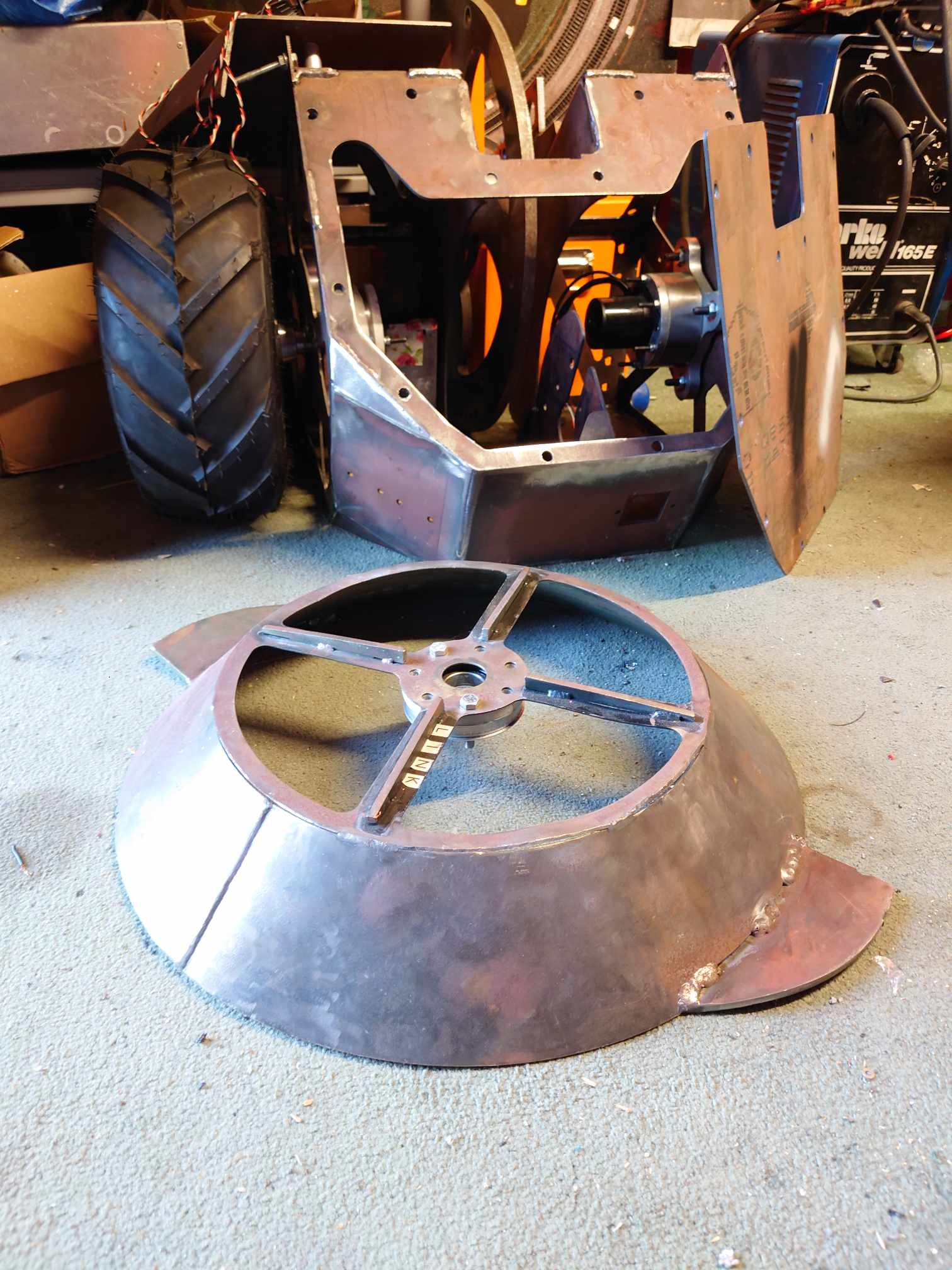
This is what a deconstructed Vega shell looks like, if anyone is interested. The c-shaped bit got rolled into a cone by a company that make oil/gas pipes out in Motherwell and it was only 75 quid! They were very confused as to the nature of job that required such a short cone…
PS, for context, Vega has a 4mm Hardox cone. When Gigabyte ran AR Steel cones at Battlebots, they had them made from 3.2mm AR plate which they could pair to a thicker top cover. Nice bit of trivia there.
The cone got welded by a mate of mine and we built up the inner robot over a weekend. The plan was for the robot to be put together on the weekend before comp, then go down to England with George as he was visiting fam the week before comp.
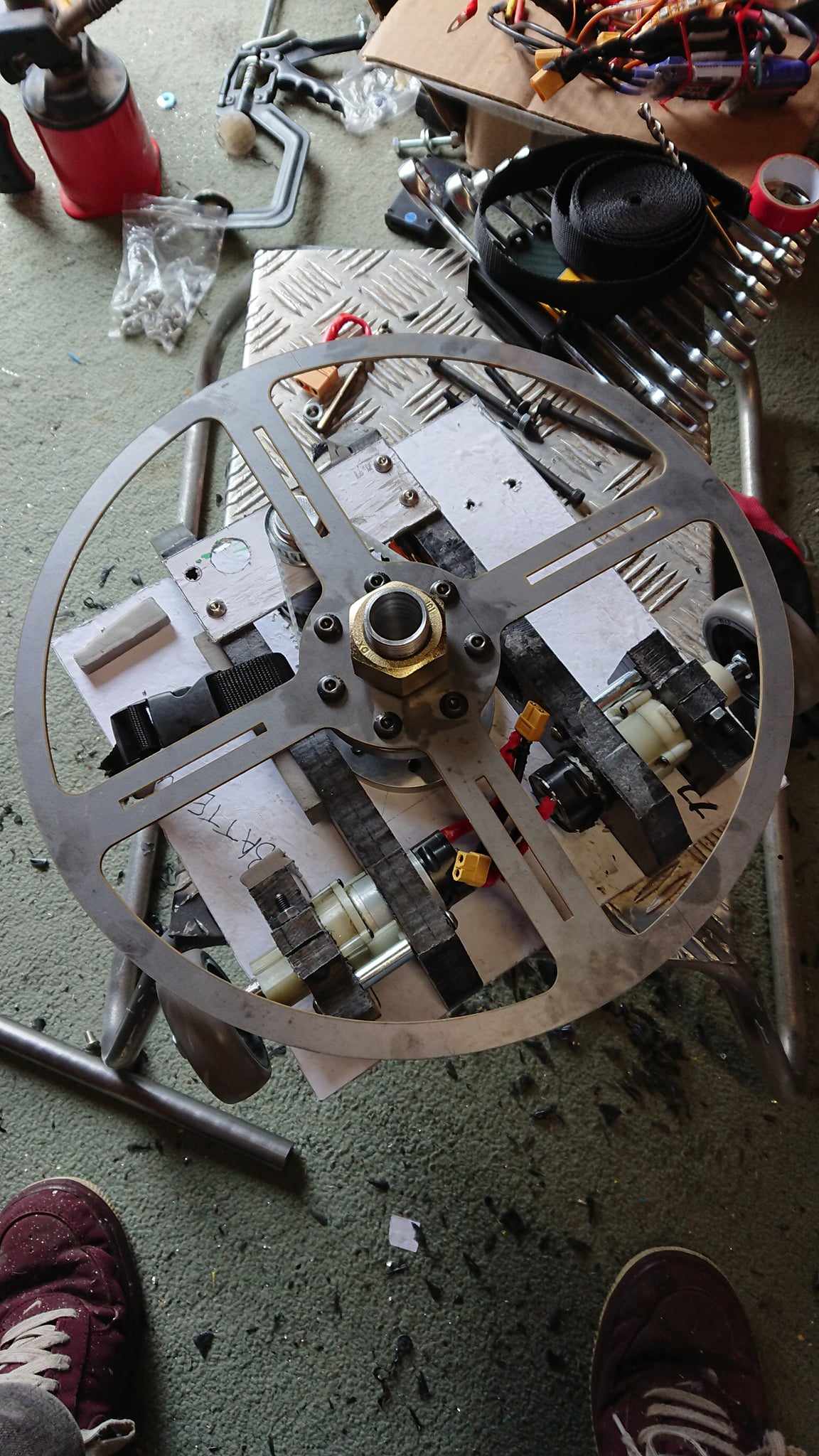
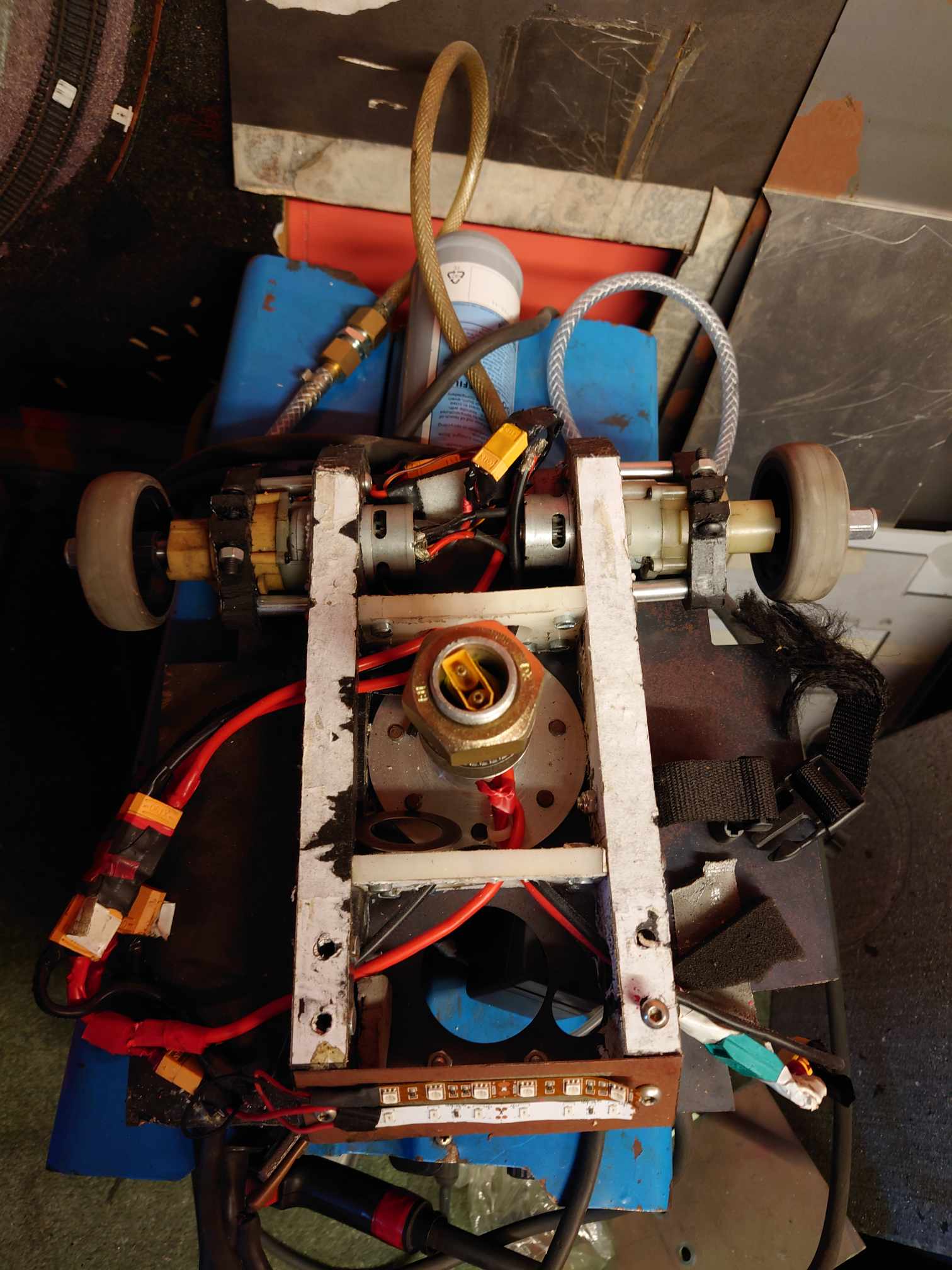
The Vega innards being put together. Vega 1 was 2WD and the front ran on 2 M6 button head bolts, spaced appropriately with washers, acting as little casters. It worked fine on a flat floor, but if the floor was damaged then we really struggled
However, the shell arrived a day late from the rollers so we missed that deadline. This meant the first time that the shell met the body of Vega was in the hotel the night before the event. It also meant that the shell traveled down to Birmingham as my checked luggage on a 6 hour Megabus. Once again, the nature of the cone drew much suspicion from the bus driver.

A Vega-cone. Not yet welded. This would have been at the concurrent time with George having the core bot down in England, getting all the electronics to be nice and reliable

A welded and primed Vega-cone!
To decorate Vega, we played up the Scots connection and decked the shell out in tartan. We got the effect by wrapping the shell in tartan wrapping paper. That was not easy to source in August!

Looking shiny
I am giving all this explanation as penance for the abysmal performance that Vega put in at Insomnia 63. That event was run as King of Bots UK, with a delegation of not only Chinese roboteers but a dude from the Chinese embassy saying a few words at the start of the event. It’s possibly my favourite event I’ve done with bots, I just wish Vega had been less awful.
The saving grace for us at that event was a rumble on the Monday where the robot actually managed to spin and dish out some damage, however problems were evident after this. In our haste we had made some pretty basic design errors with the way the shell was supported on the robot.

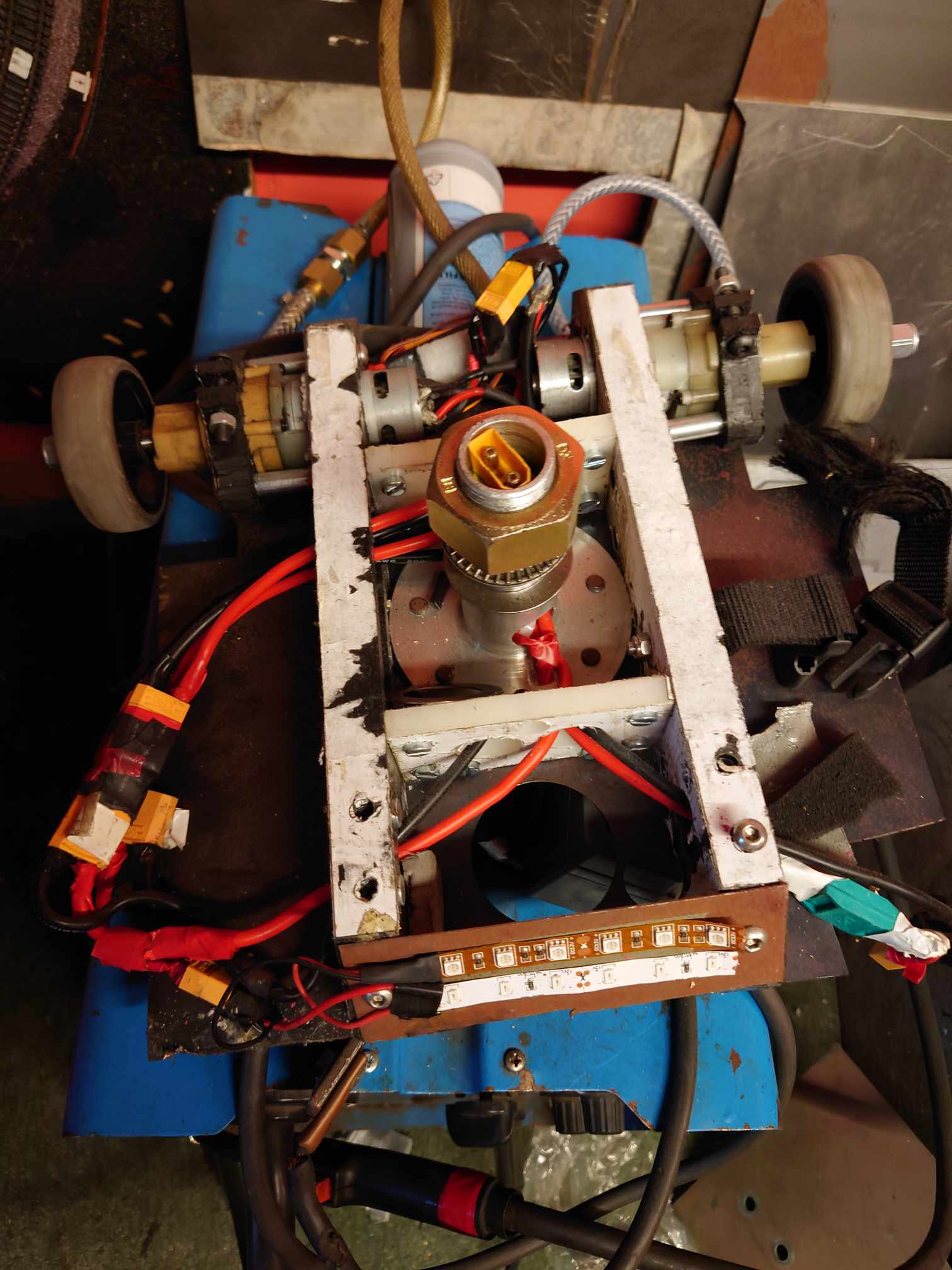
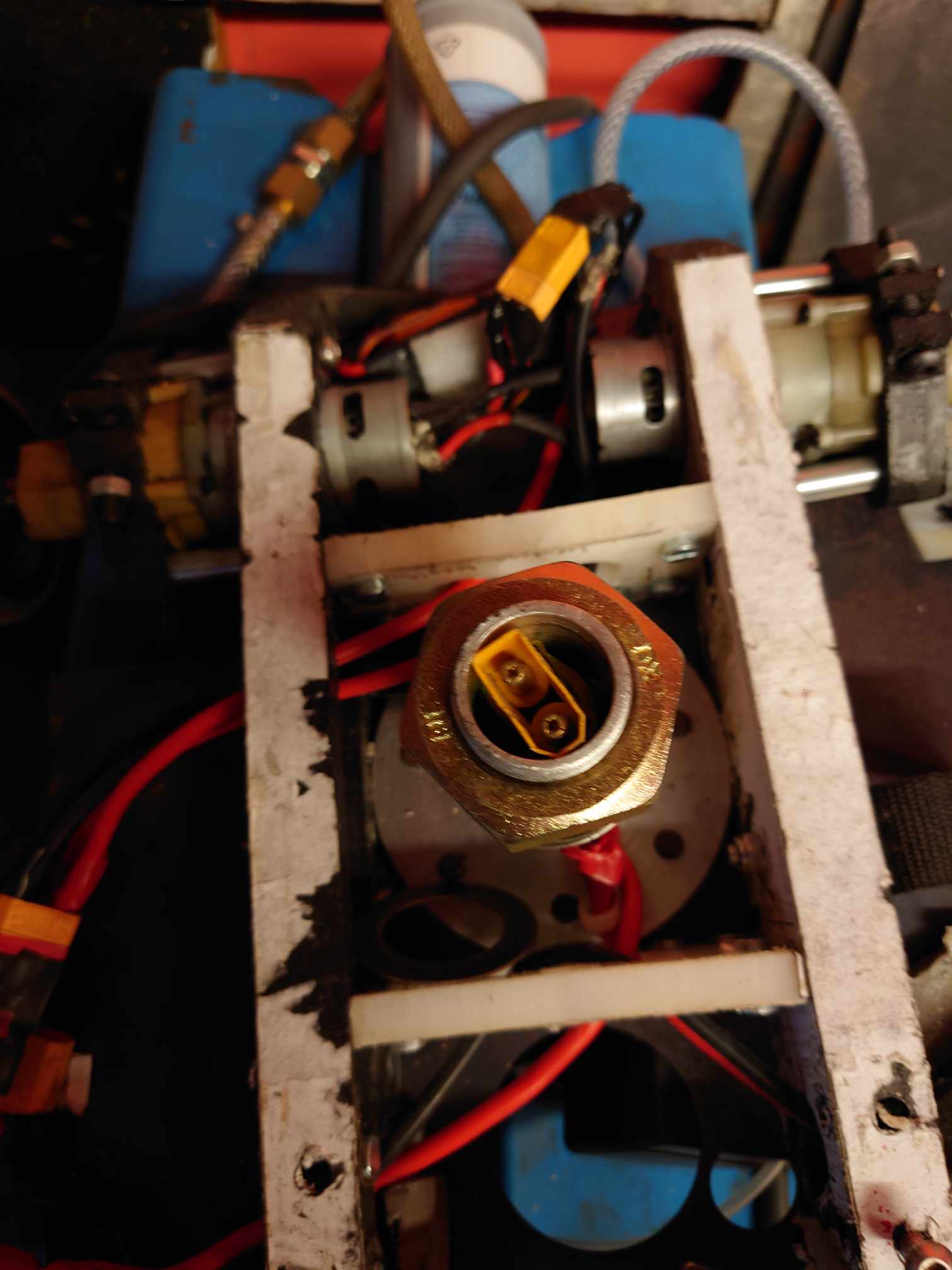
The Vega centre shaft and pulley, note there’s just 1 bearing. That was a mistake. Note also the shaft is hollow with the hole cut into it, that’s to run the link wires up the centre. That top nut is M30, the whole thing was done in 6082-T6 with power transmitted to the shell via 7 M8 bolts
Essentially, the shell is sitting on a big pulley and the bearing within said pulley is all that keeps everything from going wobbly and colliding. In our haste, rather than use a pair of deep groove bearings we only used a single one. This meant the small amount of slop inherent in the bearing type produced a slight rocking motion in the shell. What that meant, in practice, was the shell could skim against the drive wheels within the bot and when that happened it sent a mega-shock into the drive motors which then duly disintegrated after enough impacts. It also didn’t help that we were running 550 motors on 6S LiHV; although to be fair to them we never burnt out a motor, merely shook them to death with repeated impacts,
We also took a hit in a fight vs DB12 where he managed to rip a tooth from the shell (which Ed then very sportingly took home and welded back into place) but that appears to neither exist online any more nor do I have the photo of the tooth to hand. I do have photos of the bot after the welds though, turns out paper doesn’t like welding heat.

Pre event Vega in Sarah Asplin’s kitchen, with a little known machine that never went on to strike fear into roboteers across the country…

A very sad looking Vega at the event’s end
We end 2018 with Vega partaking in a couple of rumbles at Extreme Robots Cheltenham. In that event, Vega shows that it has massive amounts of power (bisecting one machine if I remember rightly) but often ending up upside down or killing itself with its hits (the battery once unplugged itself, for example).
There’s a whopper of a hit in here, then we’re upside down and it’s all over
2019
In 2019, we undertook the challenge of doing 2 heavy events, and most of our bot energy went into that. However, to kick the year off we did a RoboDojo event in March. It was great fun, we sanded the shell back to bare metal for a more grunge look and replaced the aluminium baseplate with a steel one but beyond that it was still the same Vega 1. Regardless, the intent of going to Dojo was to try and get the spinup time down and generally get some fight experience.

Nice bare metal

Vega at Dojo, probably my favourite photo of Vega 1
What we found out at Dojo was that Vega hates small arenas, quelle surprise. For that reason we got hammered into walls a lot, although we did take some good damage from Telekinesis that took out our battery. We got the spin up time down to around 5s to be at damaging speeds, but that’s still too slow. Dojo did however give us the data we wanted for how we would redesign the bot into Vega 2.


R O O D from Andy quite frankly
Vega 2 was planned out, it was going to have a much better chassis under the shell and it would have a pair of weapon drive motors (although we did look at Alienpower’s 8055 but Alienpower in general gave us the fear). The robot would move to 4WD to give more predictable handling. We had learned that a very important part of shell spinner life is running away while you spin up, so it would have to be nippy.
I also was starting to become fascinated with building things from folded or pressed sheet metal, where the geometry gives the part its strength. For this reason, the idea was to use thin aluminium for the chassis and form it into a “tub” like McLaren do with carbon. This would be light, but strong. This is needed because the actual robot is only half the machine, the rest of it being the shell.
Where Vega 2 was heading when the idea was still fresh
Speaking of the shell, Vega 2 was to get new teeth, more aggressively toothed to really cleave at things. It was also to get a bottom ring of approx 2mm thickness which would help brace the teeth. This would take the shell up to 7kg, leaving 6kg for everything else. The shaft would have a pair of bearings and be a bit stockier, this weight coming from running a smaller battery than the 5Ah LiHV Vega 1 inherited from the heavy. However, Vortex (the heavy) was 2019’s priority so nothing much was done on Vega 2
Note more aggressive teeth on this shell
2020-2022
Nothing much happened in the world to get in the way of rampant robot progress.
2023
I’ve dusted off the idea of Vega 2 this year, and the preceding 3 years haven’t been too kind. Vega 2 was very much designed around the propdrive 5060, we’d had good experiences with them on Vega 1. But they’re now unobtanium (at least until the new UK Hobbyking warehouse opens) and so that needed looking at. The tub would need welding, and that needs specialist kit because it’d be alu. The batteries had gone out of production as had the contact wheels that were to be used for traction. It needed a redesign if it was to come together.
Then there’s the climate of the UK feather scene. Dojo has a bigger arena space now than in 2019, but it’s still a compact box that isn’t suited to shell spinner fighting. Labman have their event, or had their event, but it felt a bit less accessible than the RoboChallenge ones had been due to smaller scale. The scene seems to have shifted from feathers being the predominant weight class to beetles. Is there any real point in building a Vega 2 if there doesn’t seem to be a big flashy event where a dumb, OP shell spinner would be well received? Has the feather scene gone a bit serious, with many Dojo fights being extremely short and violent, and does a dumb bot fit into that scene and contribute anything?
Well, I leave that decision to fate and will happily take opinions on it. But for now, I’d like to outline where Vega 2 is so that even if it isn’t built then hopefully folks can learn from the design.
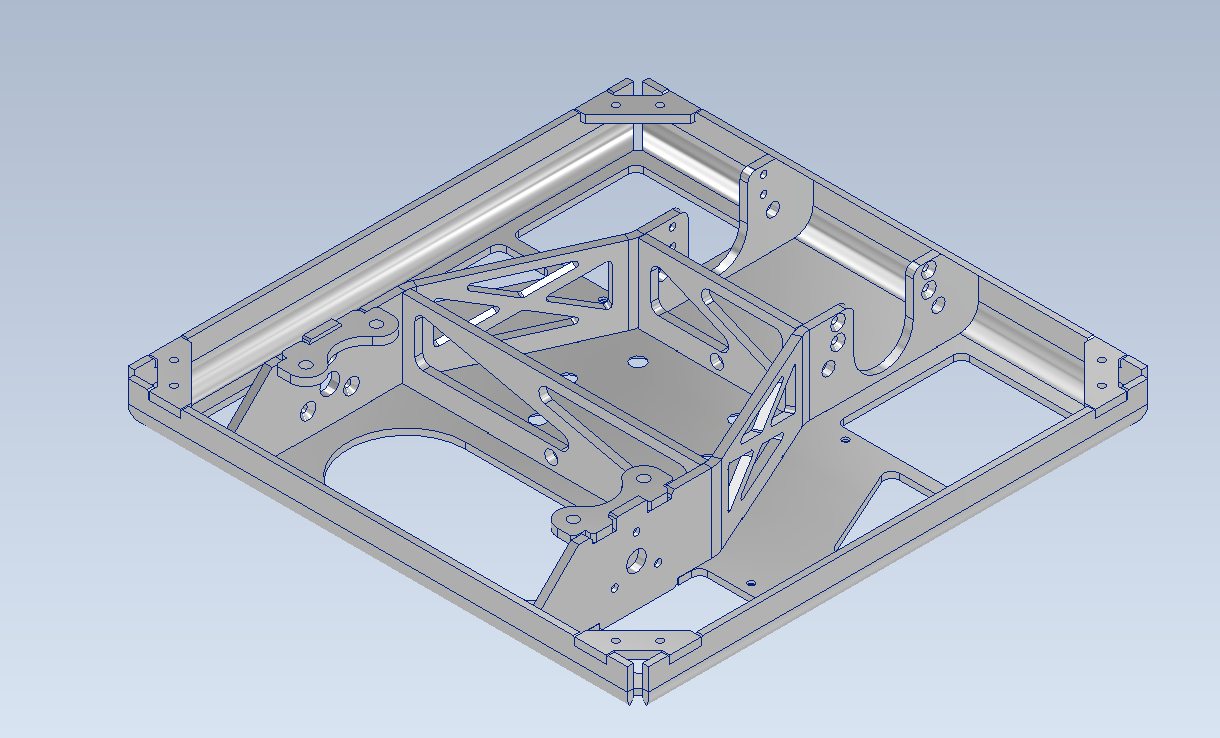
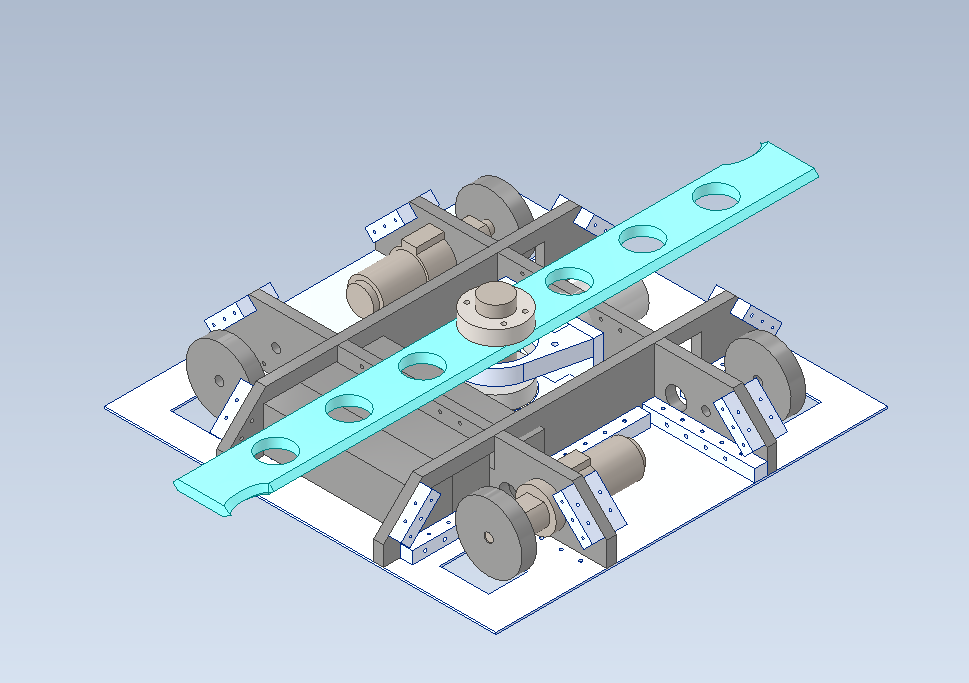
The current idea for Vega 2 Chassis, all aluminium
The chassis is still a tub structure, with the emphasis on stiffness. The chassis takes a pounding in a shell, so it needs to be stiff. All of the above is made from alu, varying from 2mm up to 5mm. Some places like the weapon motor mounts we want a bit of flex. Other places we don’t. This would still require alu welding, I have thought about trying to do this in billet but that gives me the fear.
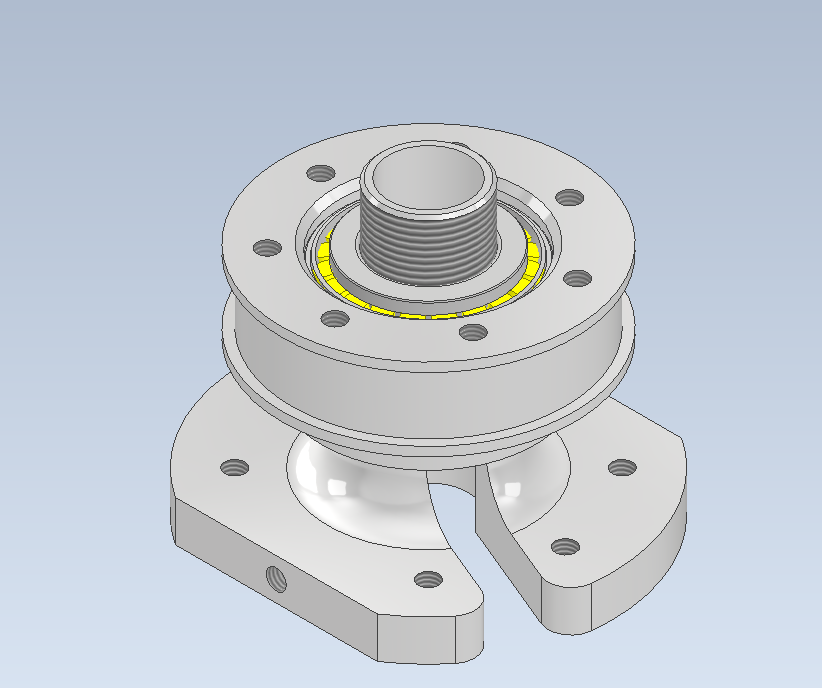
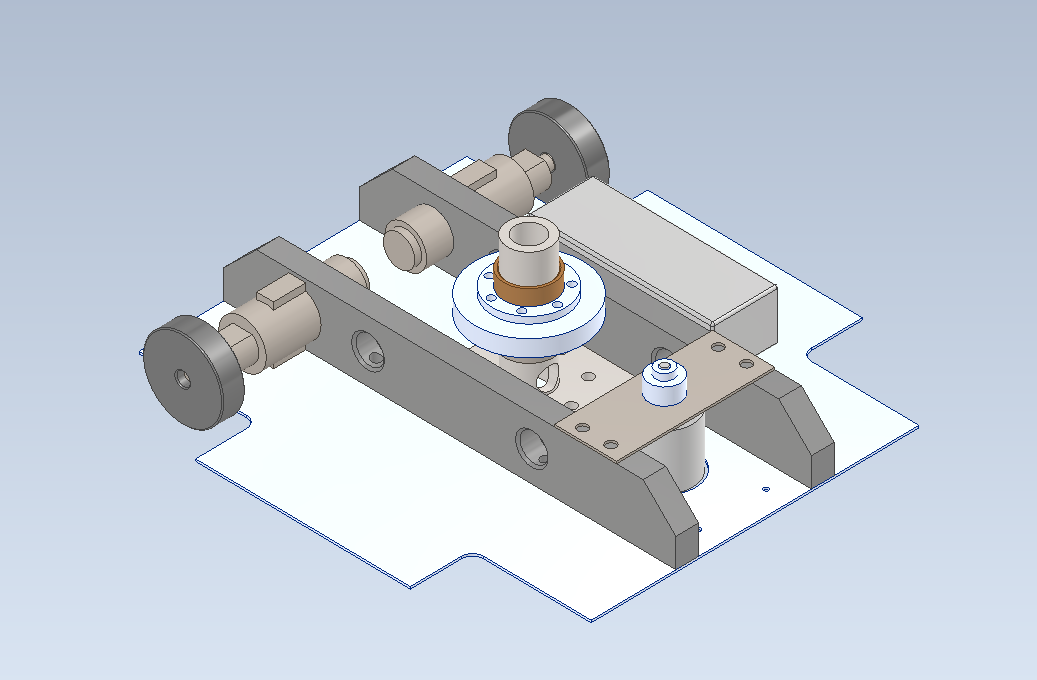
The centre shaft assembly, now with dual bearings in the pulley. They’re taper rollers here, but that might get subbed for good old deep groove if they prove difficult to pre-torque
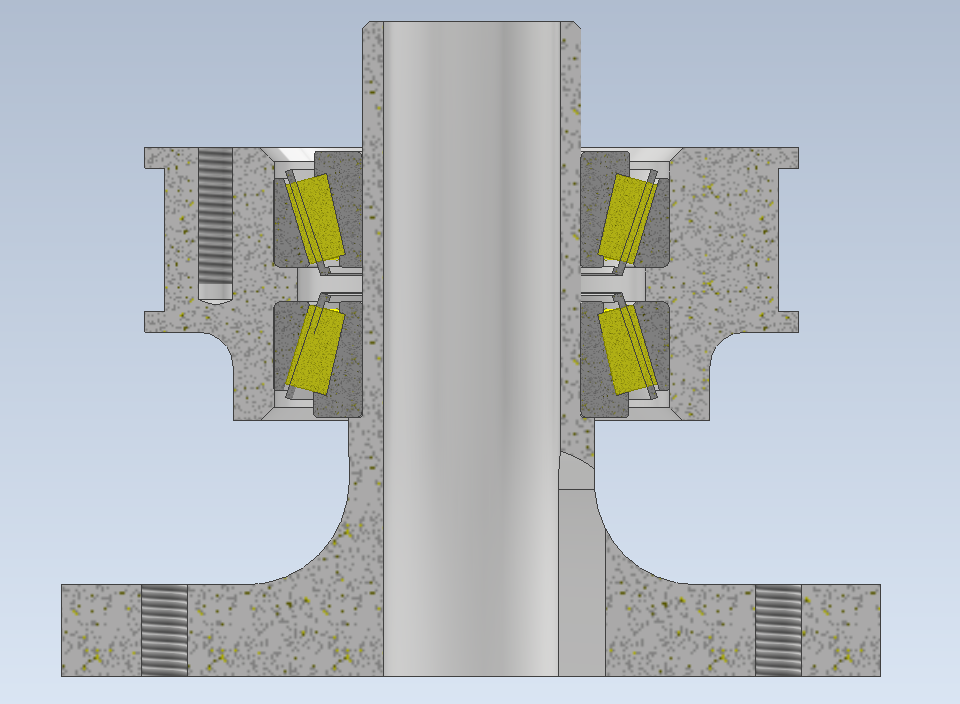
A section view of this assembly, showing dual bearings and the hollow shaft setup a bit better. the hollow section is sized so a pair of XT90 connectors will happily sit within it, in a printed link holder
There’s more 3D printing here now, things like battery holders etc. The drive is still currently P61 based, with the front wheels slaved off the rears via belt and 3D printed hubs. I’m sticking with the P61s for now as I have a pair of them to hand, the same logic is used for having Euan’s fantastic A50S speed controllers running the drive. Drive motors are 3536 size outrunners, all the drive has to do is deliver the weapon so I’m not too fussed about pushing power.
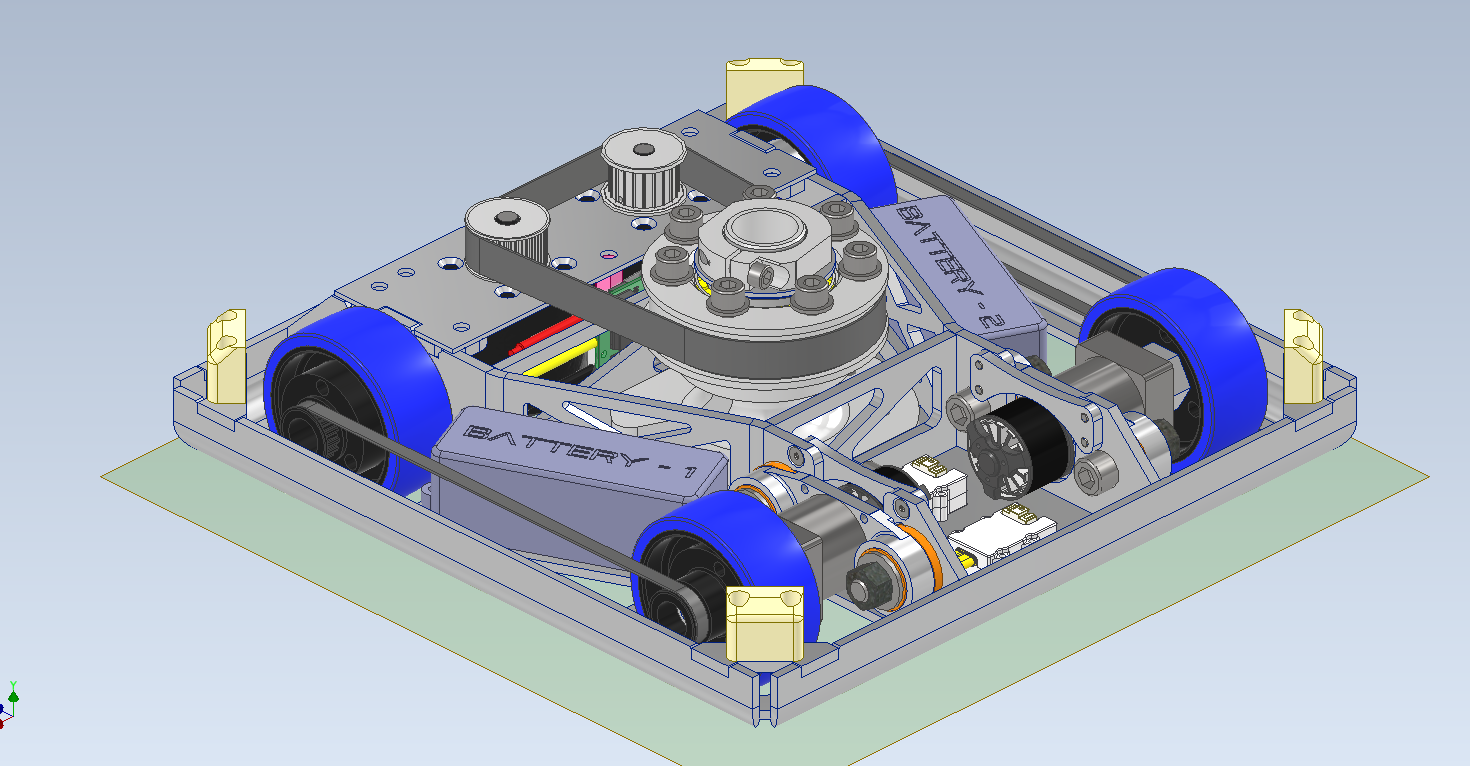
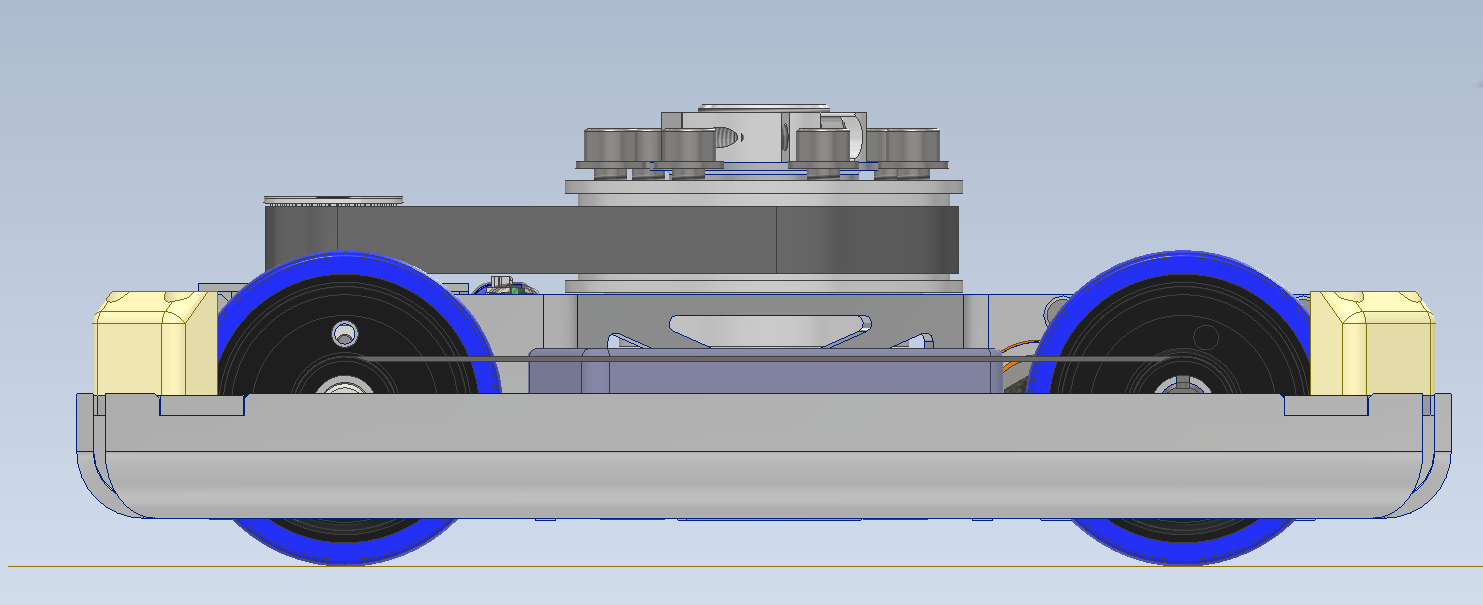
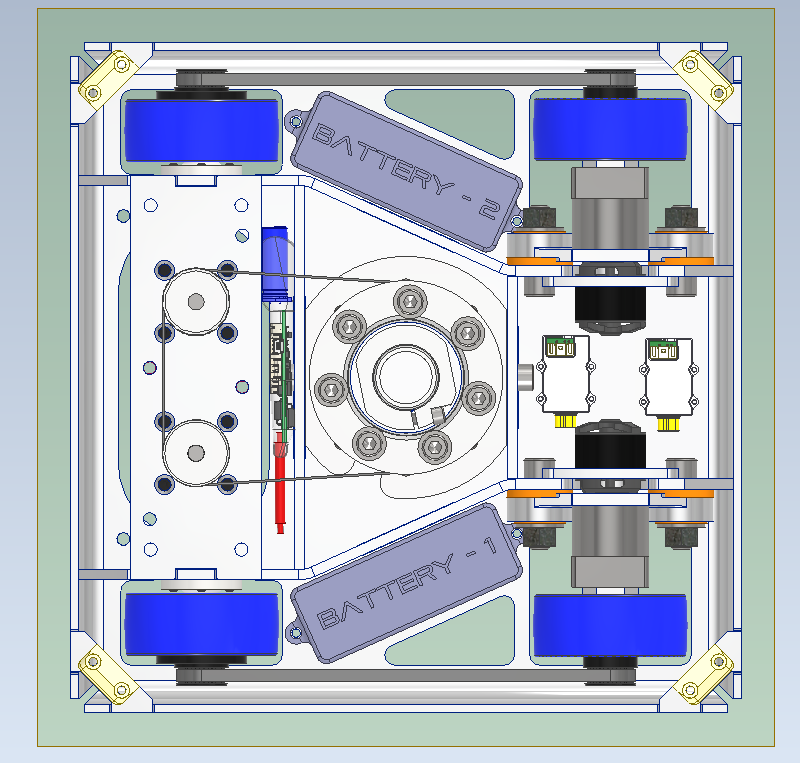
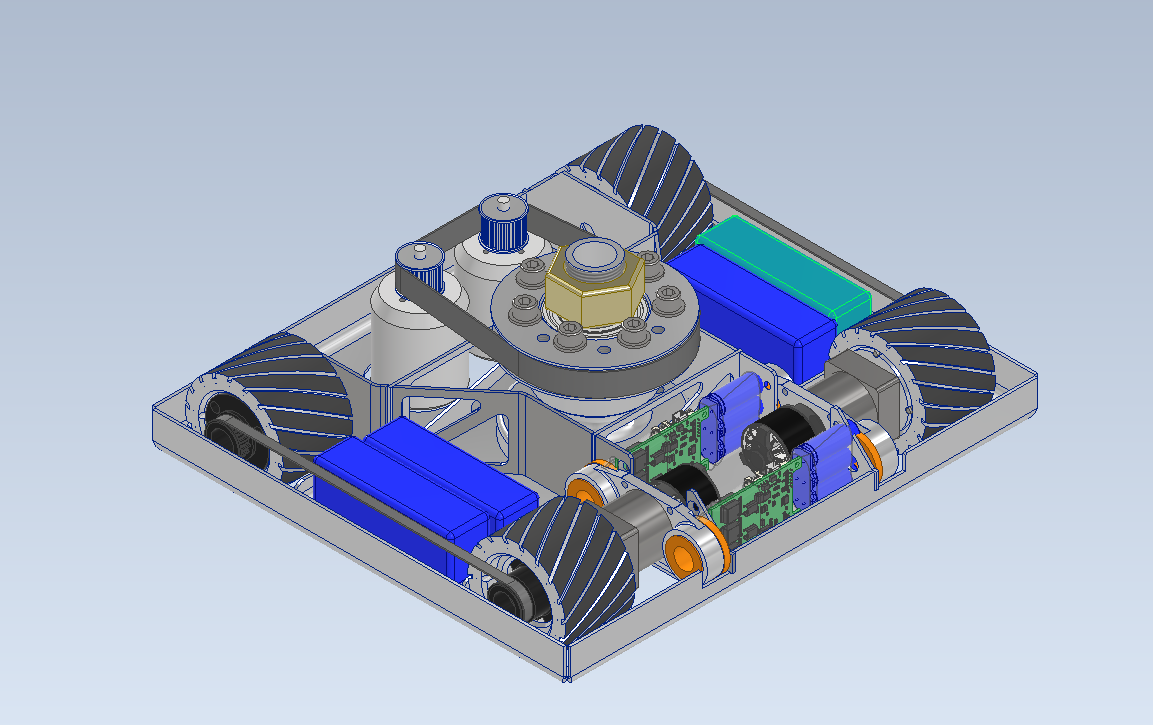
Some views of the proposed Vega 2 internals, nothing too revolutionary in here
The innards would then get a thin alu or maybe even carbon cover, I like the idea of vac-forming the top cover for the internals as it’d look sick but I’d need to find someone with said setup. Maybe I could convince my mates in F1 to do that…
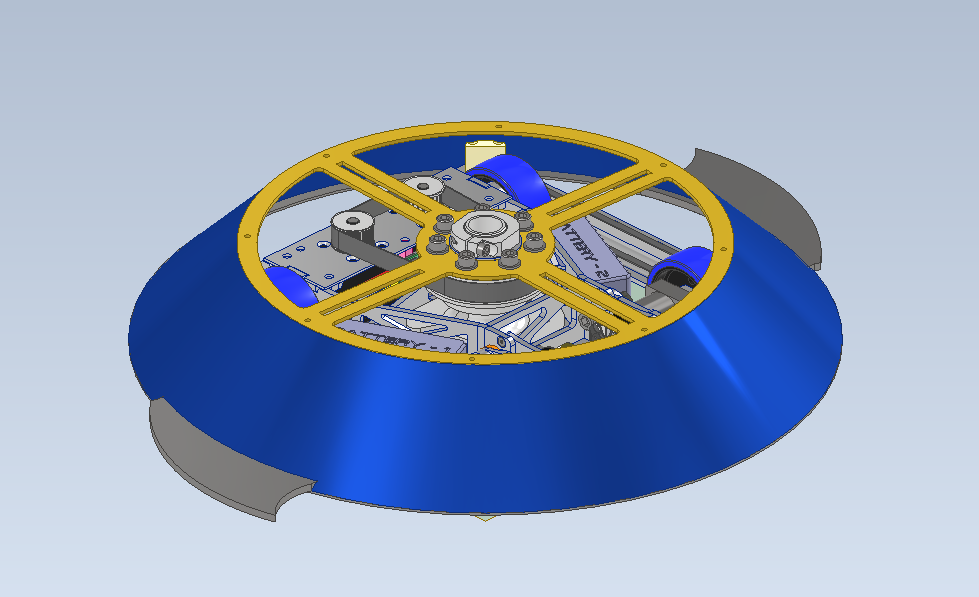
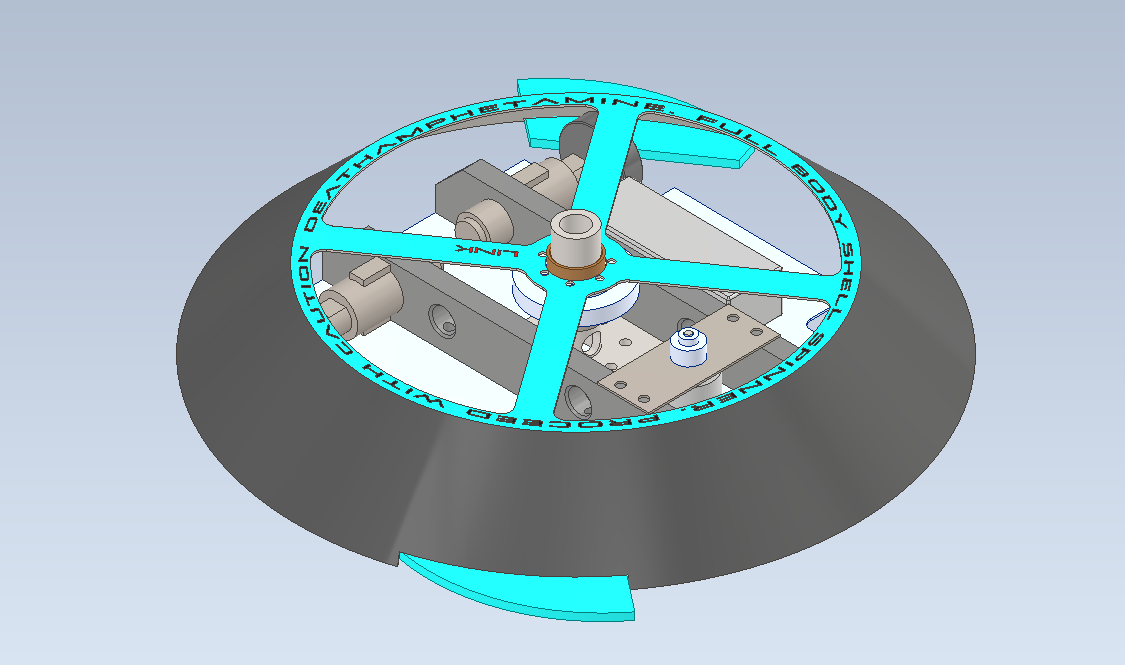
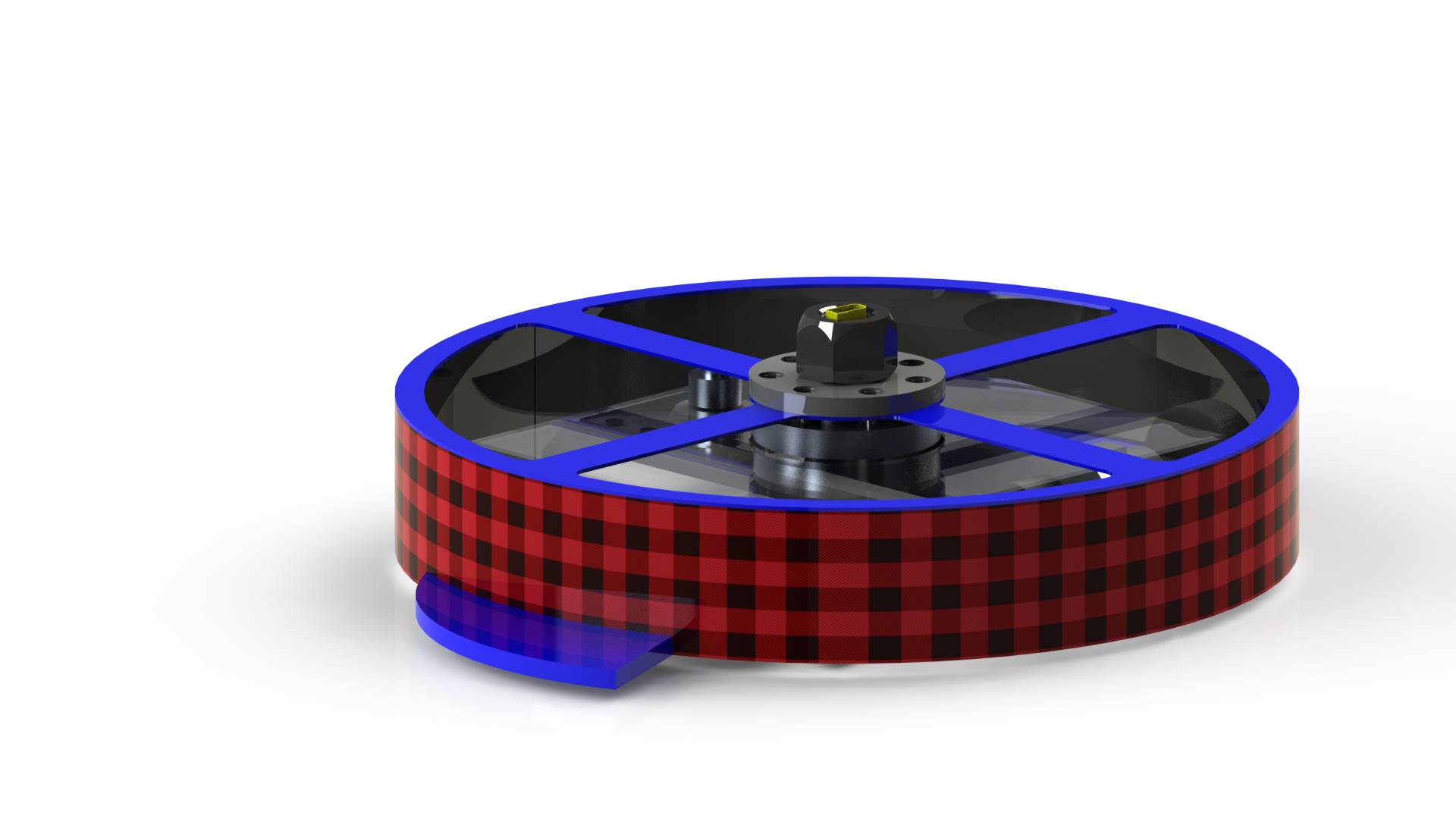
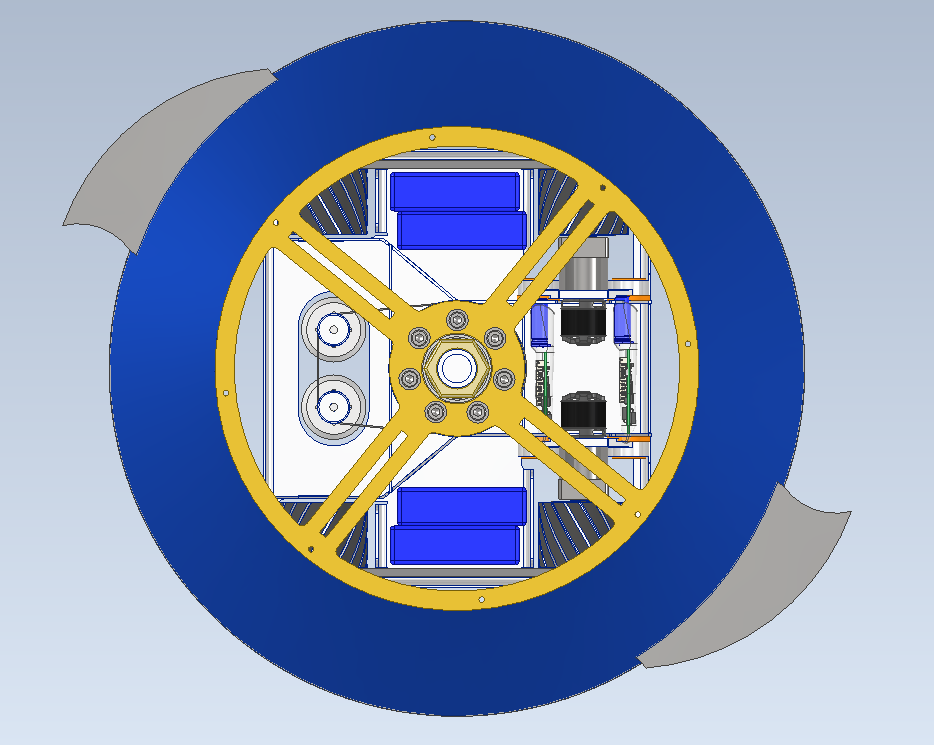
The shell is basically the same as the designs from 2020, bigger teeth and otherwise not too much change. The CAD is blue and gold but I think if there was a big comp and it had to look fancy, I’d maybe look at getting the shell painted by an artist. Let them go ham, maybe something vaguely celtic to keep the theme going of the homeland, who knows!
Conclusion
So that’s the Vega saga, start to today. Hopefully, in the ramblings, someone finds some useful details and maybe we’ll prevent people making the mistakes we did in the design of a future shell. I’d like to build a Vega 2, but I think it needs an event to justify the cost and time. If that does happen, and it gets built, I’ll document the process here ![]()
I claim my prize for the longest post that will ever be put on this forum (I started writing this at 10, it’s now 1am…) and thanks for reading along. ![]()